
Combined Soft Grasping and Crawling Locomotor Robot for Exterior Navigation of Tubular Structures



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
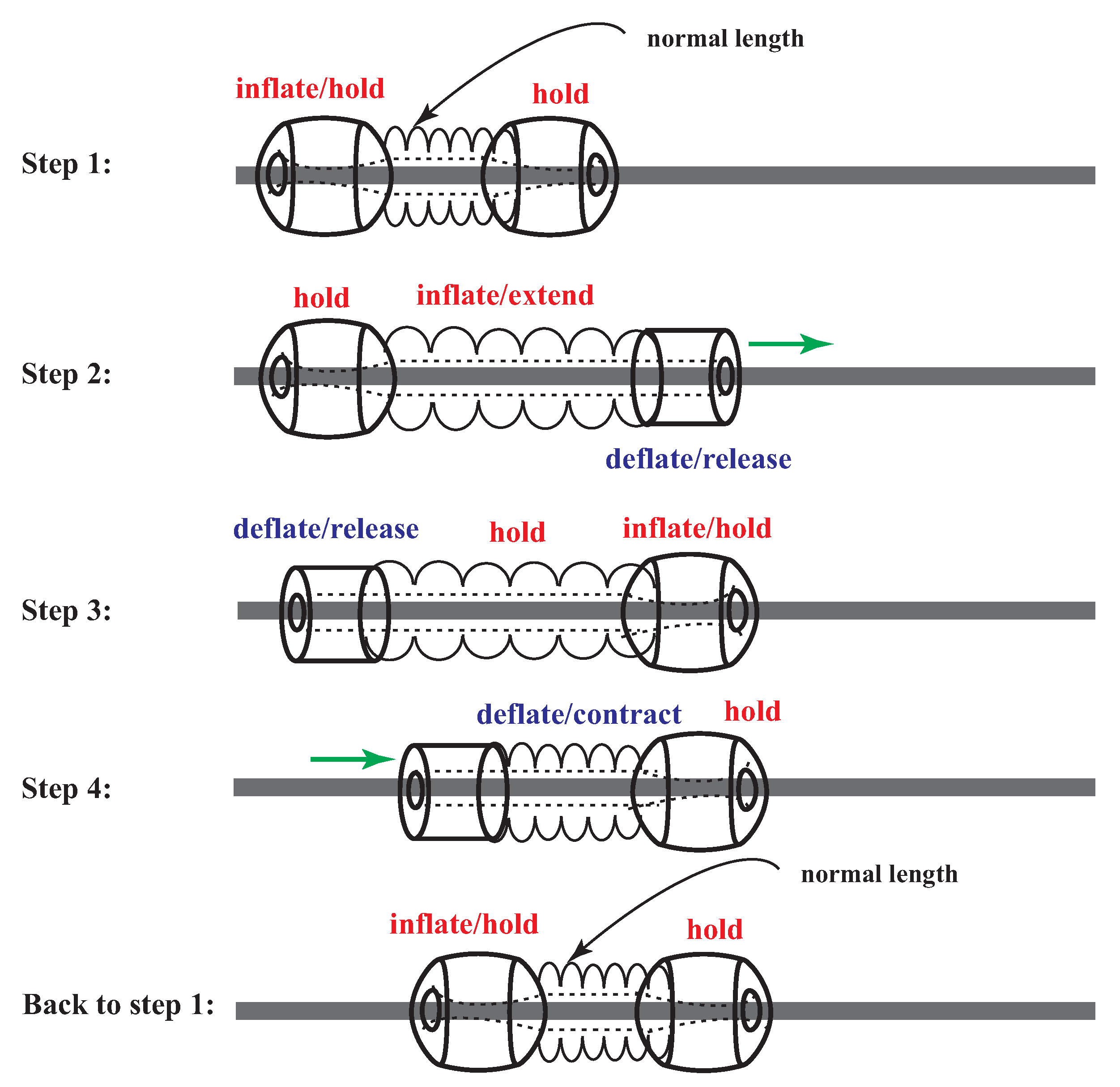
2.1. System Description
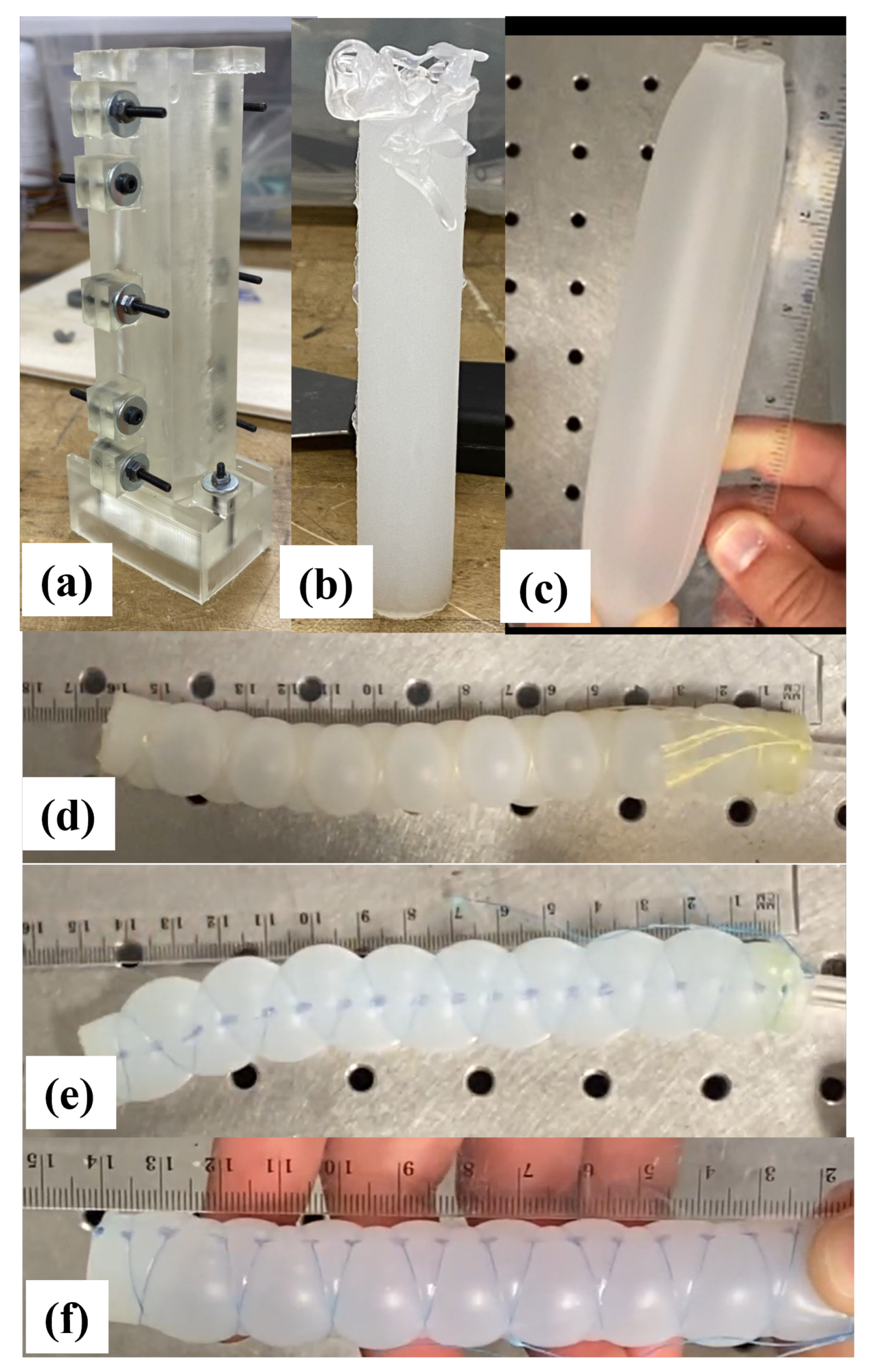
2.2. Design and Prototyping
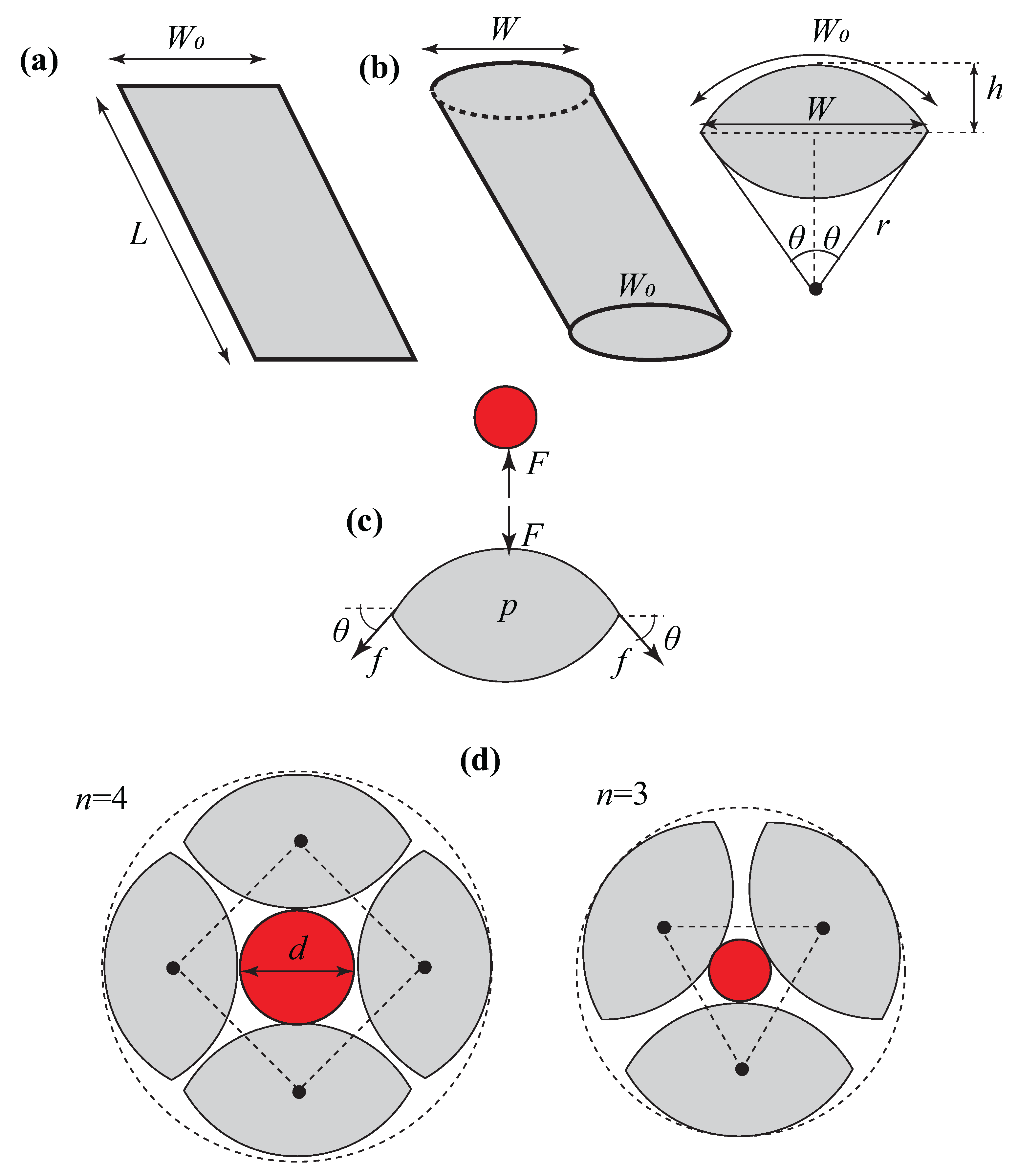
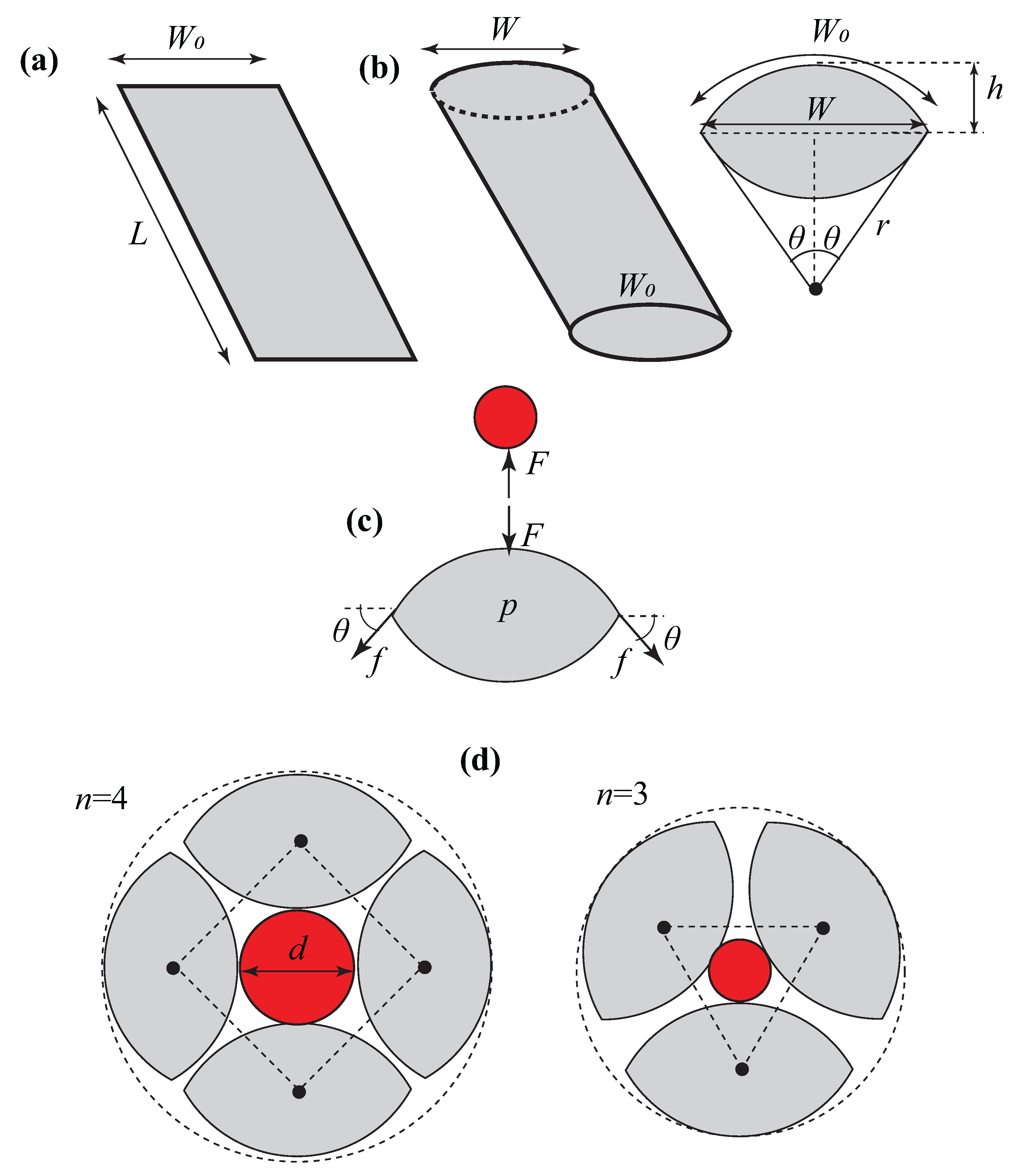
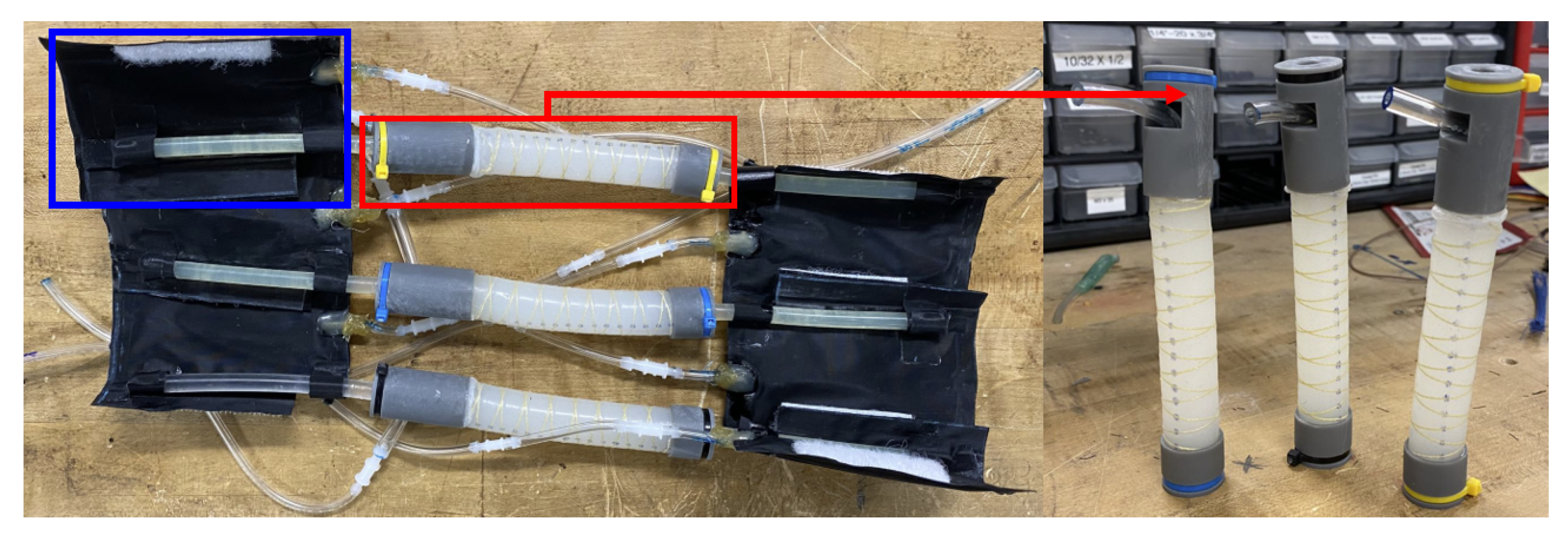
2.2.1. Fabric-Based Soft Actuators for the Grasping Action
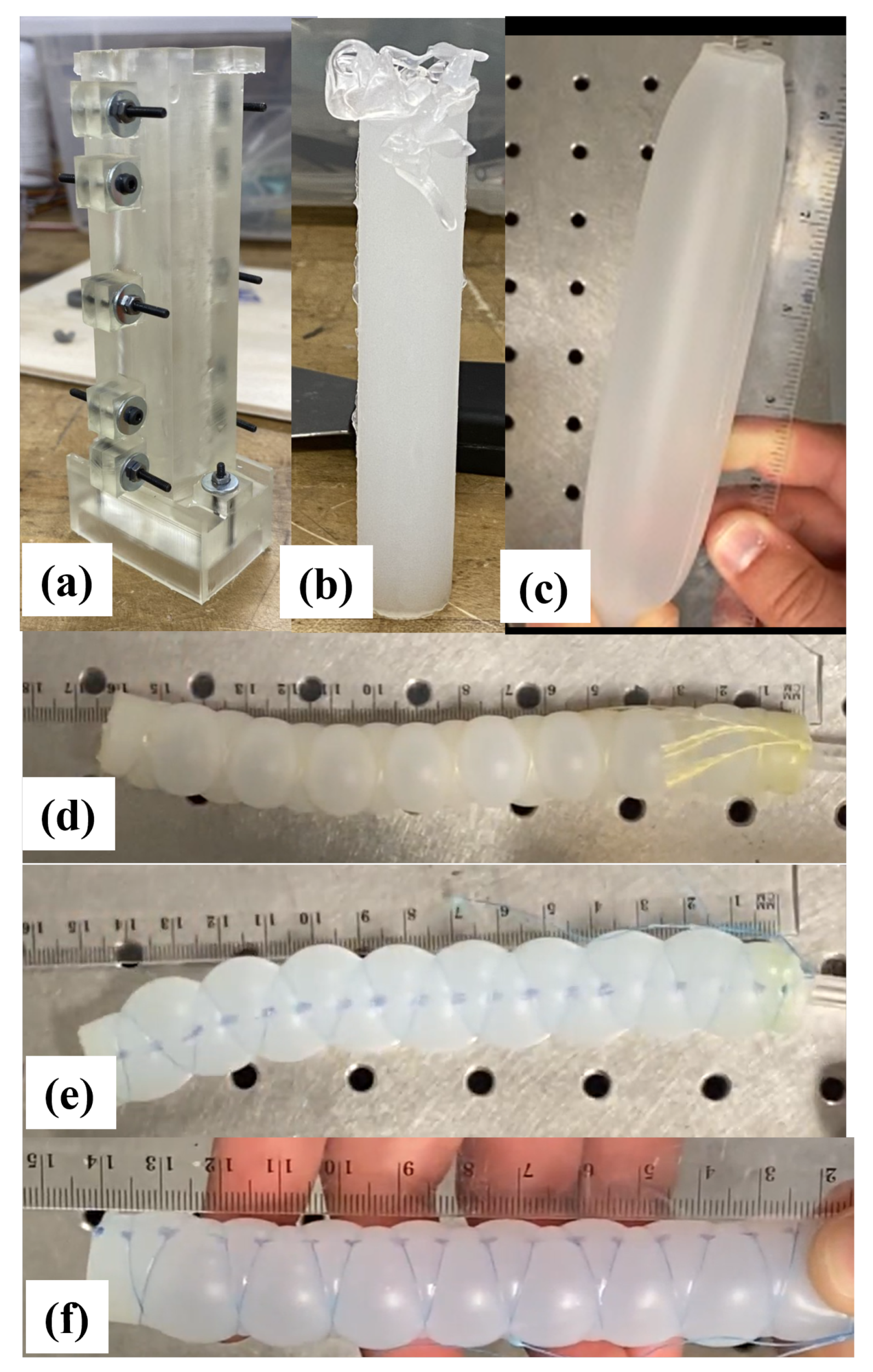
2.2.2. Prototype
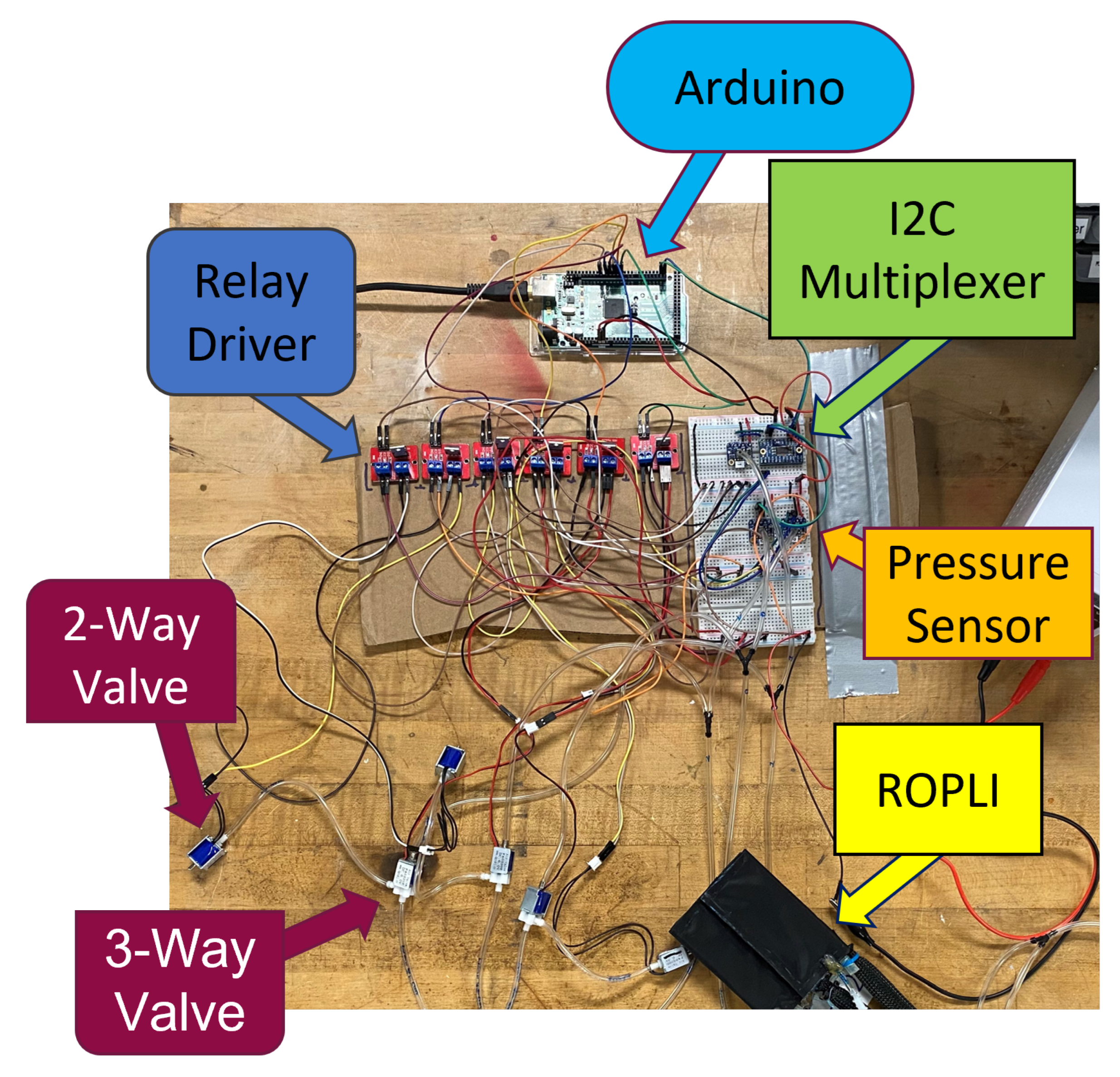
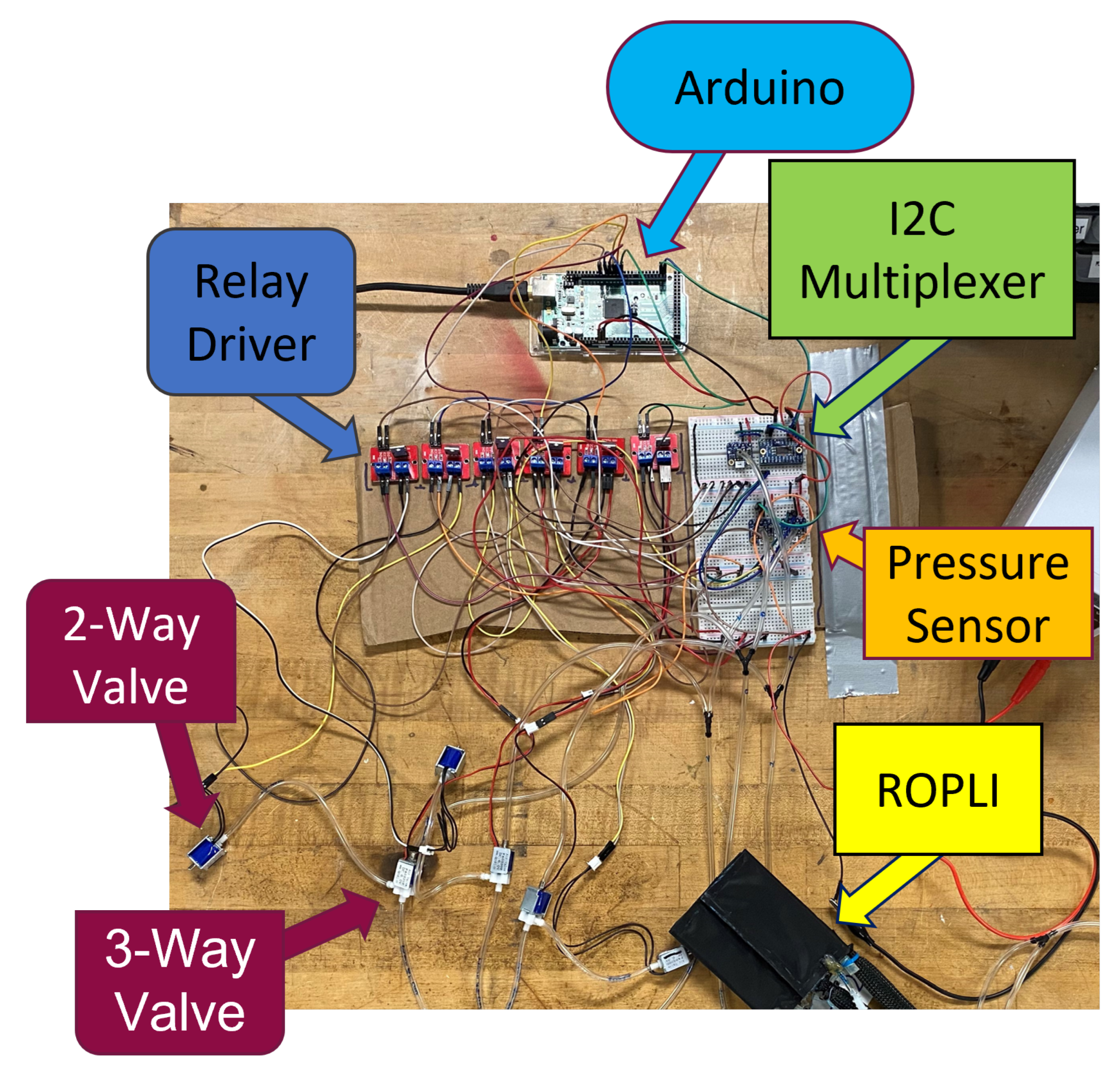
2.3. Control System: Hardware and Algorithm
2.4. Testing and Demonstration
3. Results
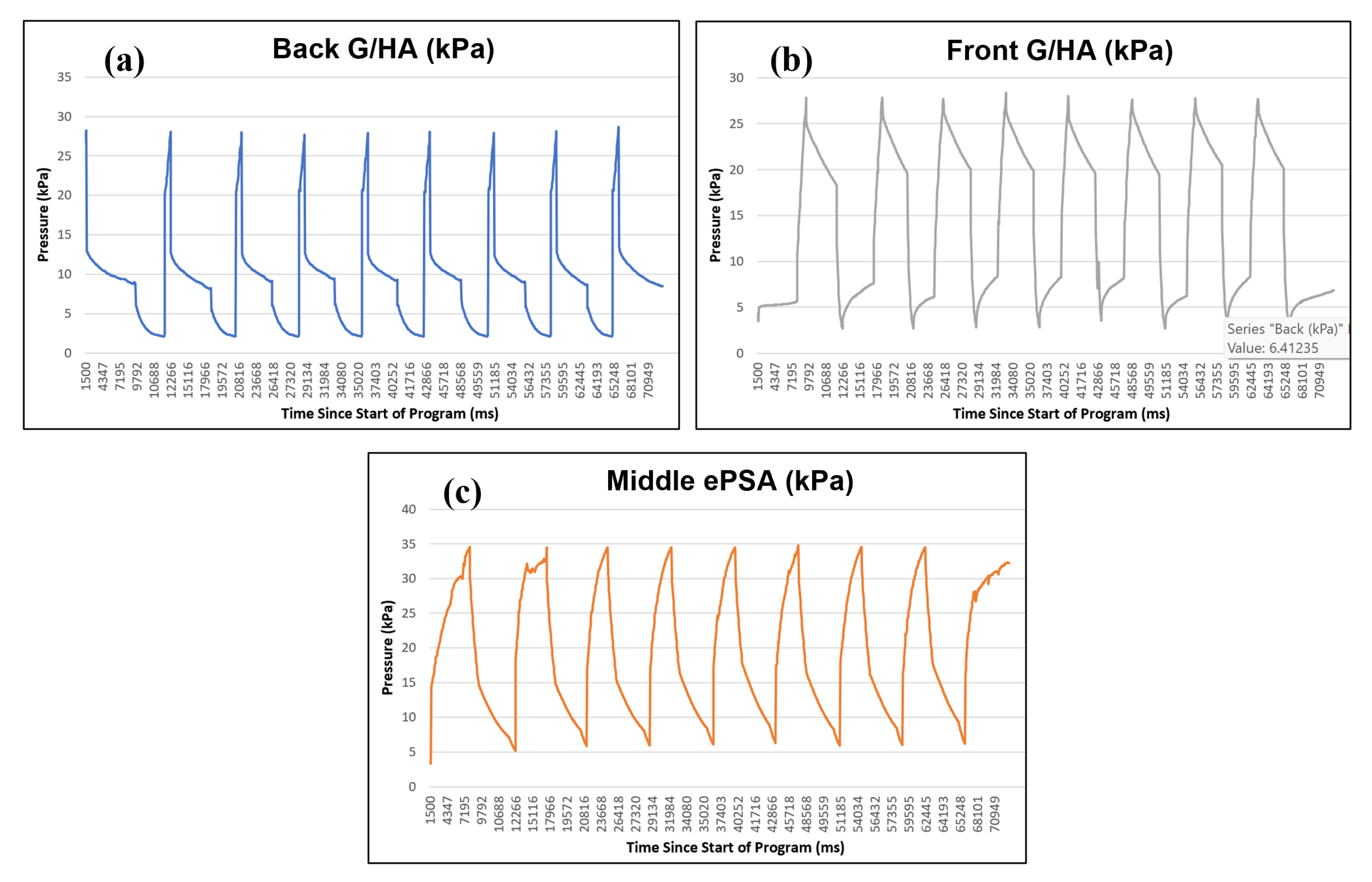
3.1. Soft Actuator Characterization
3.2. Solenoid Valve Response Time Characterization
3.3. Soft Robot Average Speed Comparison
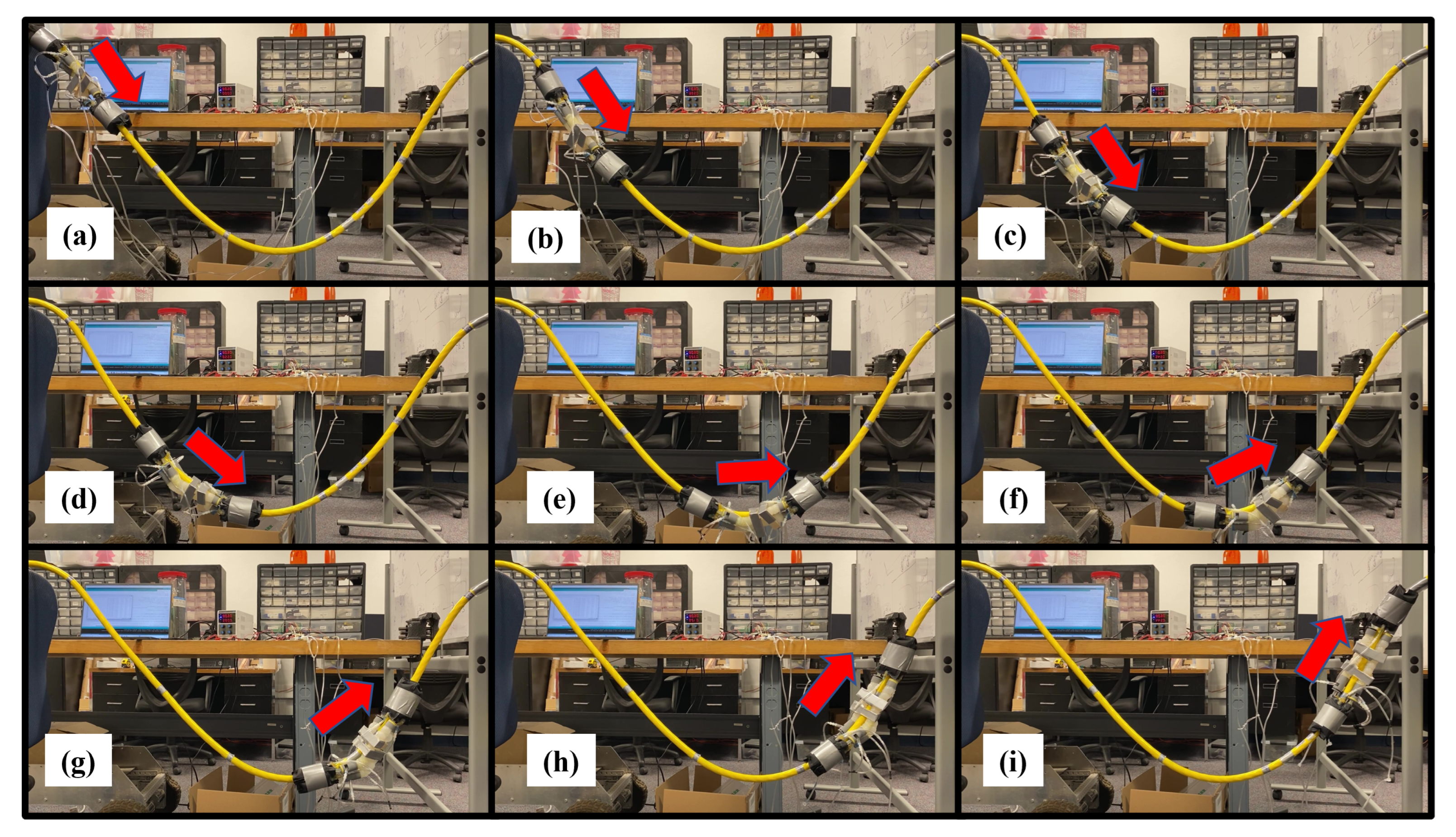
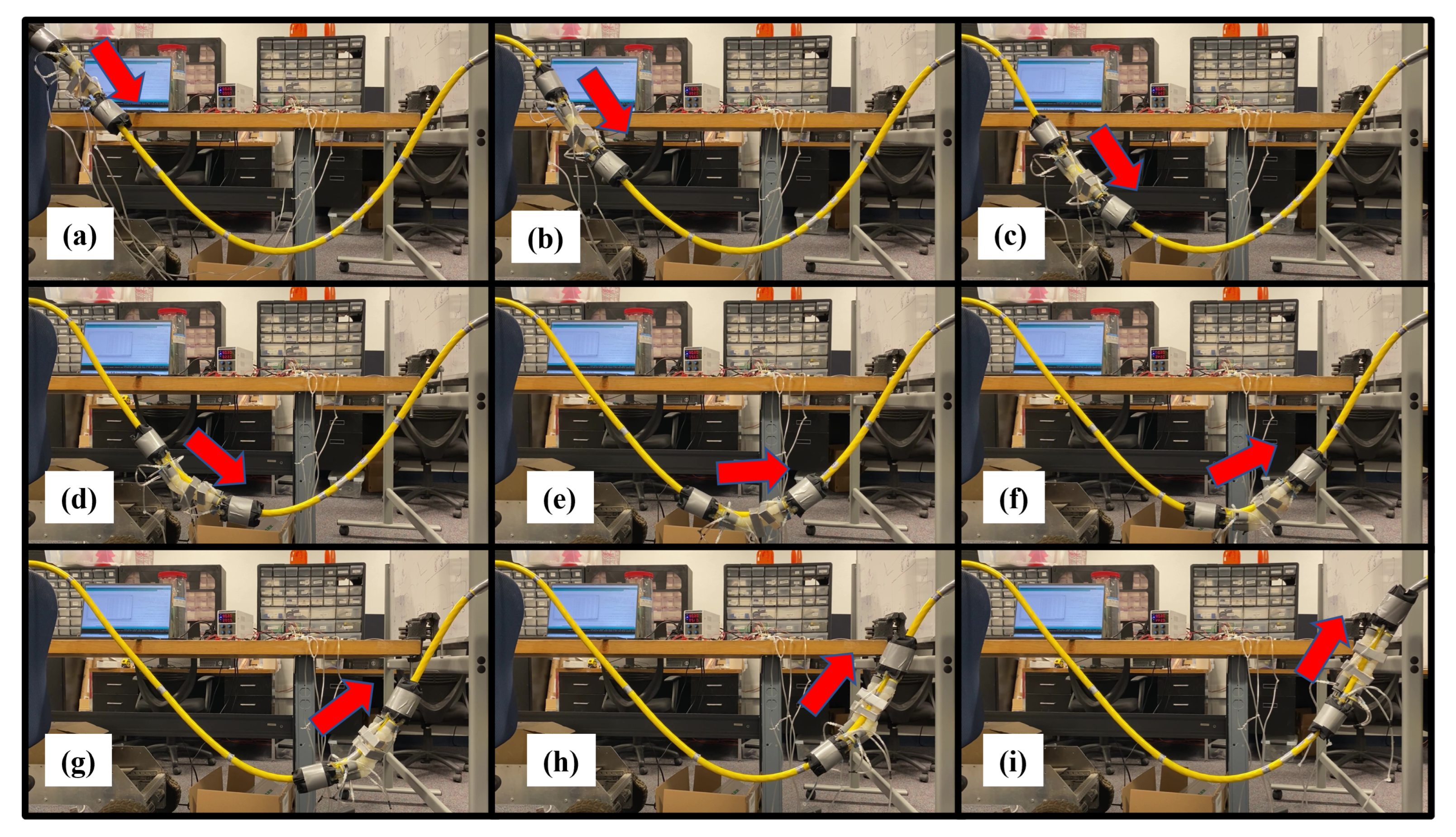
3.4. Downhill and Uphill Navigation of a Curved Tubular Structure
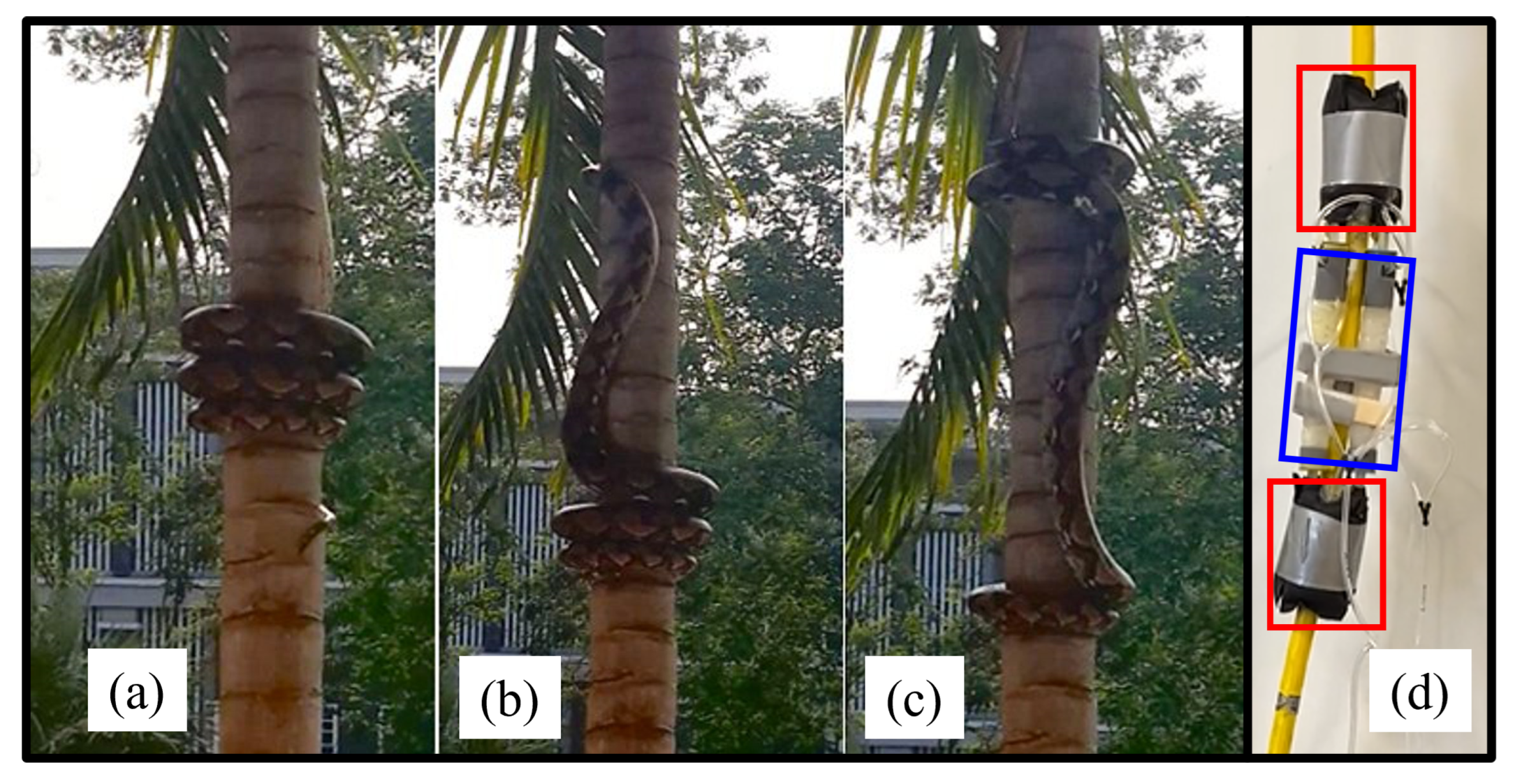
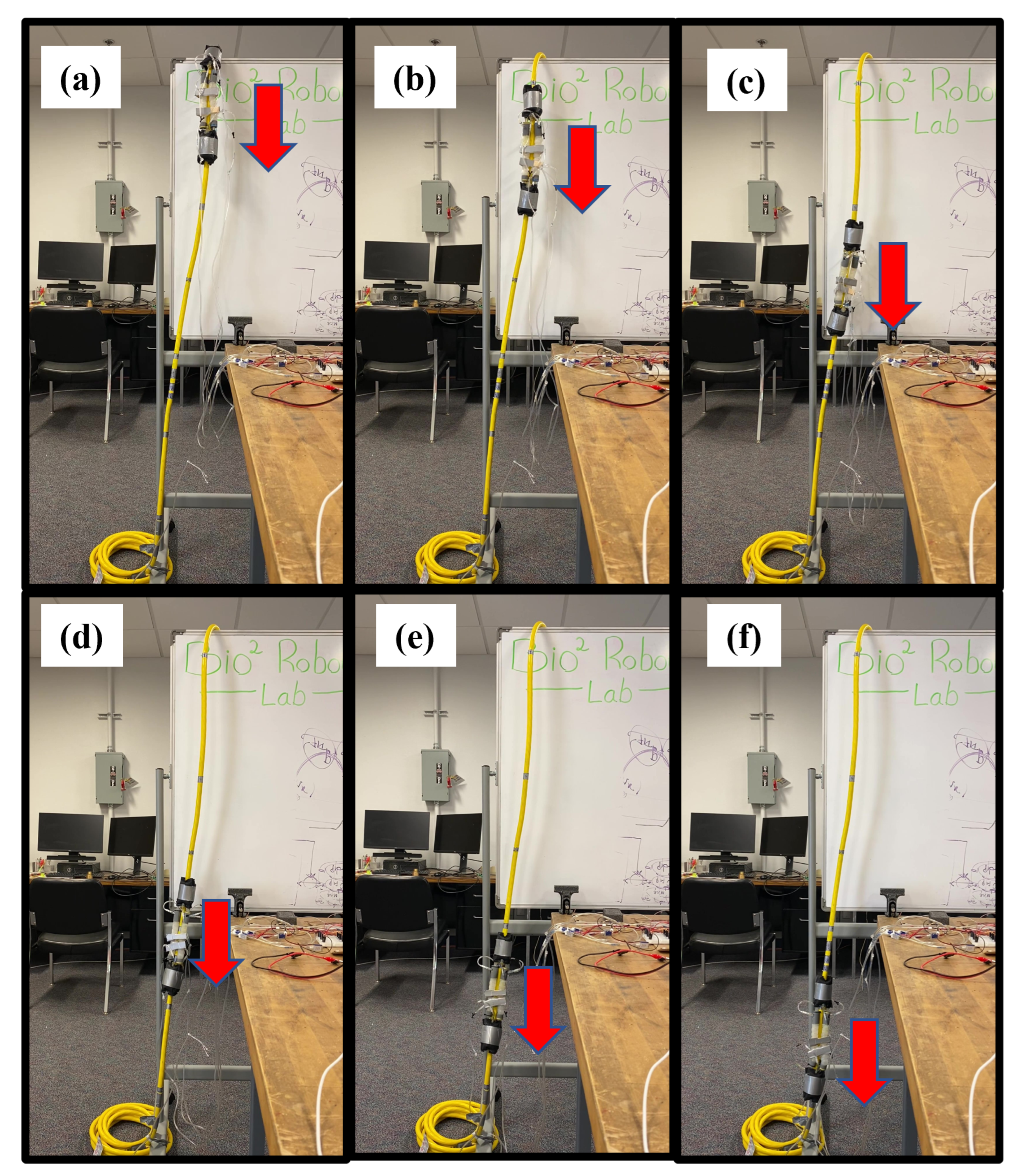
3.5. Vertical Up and Down Navigation
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| G/HA | Grabber/holder actuator |
| C.E.T.O.P. | European Fluid Power Committee |
| ePSA | Extensible pneumatic soft actuator |
| SFA | Soft fabric actuator |
| TTI | Time to inflate |
| TTD | Time to deflate |
References
- Fang, G.; Cheng, J. Advances in Climbing Robots for Vertical Structures in the Past Decade: A Review. Biomimetics 2023, 8, 47. [Google Scholar] [CrossRef] [PubMed]
- Katrasnik, J.; Pernus, F.; Likar, B. A survey of mobile robots for distribution power line inspection. IEEE Trans. Power Deliv. 2009, 25, 485–493. [Google Scholar] [CrossRef]
- Katrasnik, J.; Pernus, F.; Likar, B. New robot for power line inspection. In Proceedings of the 2008 IEEE Conference on Robotics, Automation and Mechatronics, Chengdu, China, 21–24 September 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 1195–1200. [Google Scholar]
- Mendoza, N.; Nemati, H.; Haghshenas-Jaryani, M.; Dehghan-Niri, E. An Inflatable Soft Crawling Robot with Nondestructive Testing Capability for Overhead Power Line Inspection. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Columbus, OH, USA, 30 October–3 November 2022; American Society of Mechanical Engineers: New York, NY, USA, 2022; Volume 86670, p. V005T07A021. [Google Scholar]
- Fang, Y.; Wang, S.; Bi, Q.; Cui, D.; Yan, C. Design and Technical Development of Wall-Climbing Robots: A Review. J. Bionic Eng. 2022, 19, 877–901. [Google Scholar] [CrossRef]
- Megalingam, R.K.; Sakthiprasad, K.; Sreekanth, M.; Vivek, G.V. A survey on robotic coconut tree climbers–existing methods and techniques. IOP Conf. Ser. Mater. Sci. Eng. 2017, 225, 012201. [Google Scholar] [CrossRef]
- Seo, T.; Jeon, Y.; Park, C.; Kim, J. Survey on Glass And Façade-Cleaning Robots: Climbing Mechanisms, Cleaning Methods, and Applications. Int. J. Precis. Eng. Manuf.-Green Technol. 2019, 6, 367–376. [Google Scholar] [CrossRef]
- Cai, S.; Ma, Z.; Skibniewski, M.J.; Bao, S. Construction automation and robotics for high-rise buildings over the past decades: A comprehensive review. Adv. Eng. Inform. 2019, 42, 100989. [Google Scholar] [CrossRef]
- Bogue, R. Climbing robots: Recent research and emerging applications. Ind. Robot. Int. J. Robot. Res. Appl. 2019, 46, 721–727. [Google Scholar] [CrossRef]
- Hou, S.; Dong, B.; Wang, H.; Wu, G. Inspection of surface defects on stay cables using a robot and transfer learning. Autom. Constr. 2020, 119, 103382. [Google Scholar] [CrossRef]
- Shah, D.; Yang, B.; Kriegman, S.; Levin, M.; Bongard, J.; Kramer-Bottiglio, R. Shape Changing Robots: Bioinspiration, Simulation, and Physical Realization. Adv. Mater. 2021, 33, 2002882. [Google Scholar] [CrossRef]
- Cianchetti, M.; Calisti, M.; Margheri, L.; Kuba, M.; Laschi, C. Bioinspired locomotion and grasping in water: The soft eight-arm OCTOPUS robot. Bioinspir. Biomim. 2015, 10, 035003. [Google Scholar] [CrossRef] [PubMed]
- Lopez, M.; Haghshenas-Jaryani, M. A Muscle-Driven Mechanism for Locomotion of Snake-Robots. Automation 2022, 3, 1–26. [Google Scholar] [CrossRef]
- Lopez, M.; Haghshenas-Jaryani, M. A Study of Energy-Efficient and Optimal Locomotion in a Pneumatic Artificial Muscle-Driven Snake Robot. Robotics 2023, 12, 89. [Google Scholar] [CrossRef]
- Yin, A.; Lin, H.C.; Thelen, J.; Mahner, B.; Ranzani, T. Combining locomotion and grasping functionalities in soft robots. Adv. Intell. Syst. 2019, 1, 1900089. [Google Scholar] [CrossRef]
- Sanfilippo, F. Combining grasping with adaptive path following and locomotion for modular snake robots. Int. J. Mech. Eng. Robot. Res. 2022, 11, 59–65. [Google Scholar] [CrossRef]
- Salvietti, G.; Zhang, H.X.; Gonzalez-Gòmez, J.; Prattichizzo, D.; Zhang, J.W. Task priority grasping and locomotion control of modular robot. In Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guilin, China, 19–23 December 2009; pp. 1069–1074. [Google Scholar] [CrossRef]
- Asfour, T.; Borrás, J.; Mandery, C.; Kaiser, P.; Aksoy, E.E.; Grotz, M. On the dualities between grasping and whole-body loco-manipulation tasks. Robot. Res. 2018, 2, 305–322. [Google Scholar]
- Chen, S.; Cao, Y.; Sarparast, M.; Yuan, H.; Dong, L.; Tan, X.; Cao, C. Soft Crawling Robots: Design, Actuation, and Locomotion. Adv. Mater. Technol. 2020, 5, 1900837. [Google Scholar] [CrossRef]
- Zhang, B.; Fan, Y.; Yang, P.; Cao, T.; Liao, H. Worm-Like Soft Robot for Complicated Tubular Environments. Soft Robot. 2019, 6, 399–413. [Google Scholar] [CrossRef]
- Chattopadhyay, P.; Ghoshal, S.; Majumder, A.; Dikshit, H. Locomotion Methods of Pipe Climbing robots: A Review. J. Eng. Sci. Technol. Rev. 2018, 11, 154–165. [Google Scholar] [CrossRef]
- Roh, S.g.; Choi, H.R. Differential-drive in-pipe robot for moving inside urban gas pipelines. IEEE Trans. Robot. 2005, 21, 1–17. [Google Scholar]
- Yousef, B.F.; Bastaki, N. Worm robot with dynamic adaptation to pipe diameter for in-pipe inspection. Int. J. Eng. Innov. Technol. 2014, 3, 286–292. [Google Scholar]
- Xu, Z.L.; Lu, S.; Yang, J.; Feng, Y.H.; Shen, C.T. A wheel-type in-pipe robot for grinding weld beads. Adv. Manuf. 2017, 5, 182–190. [Google Scholar] [CrossRef]
- Li, P.; Ma, S.; Lyu, C.; Jiang, X.; Liu, Y. Energy-efficient control of a screw-drive pipe robot with consideration of actuator’s characteristics. Robot. Biomim. 2016, 3, 11. [Google Scholar] [CrossRef]
- Wakimoto, S.; Nakajima, J.; Takata, M.; Kanda, T.; Suzumori, K. A micro snake-like robot for small pipe inspection. In Proceedings of the MHS2003, 2003 International Symposium on Micromechatronics and Human Science (IEEE Cat. No. 03TH8717), Nagoya, Japan, 19–22 October 2003; IEEE: Piscataway, NJ, USA, 2003; pp. 303–308. [Google Scholar]
- Cianciarulo, F.; Garbulinski, J.; Chambers, J.; Pillsbury, T.; Wereley, N.; Cross, A.; Trivedi, D. Analysis of an anchoring muscle for pipe crawling robot. In Proceedings of the SPIE Smart Structures + Nondestructive Evaluation, Long Beach, CA, USA, 12–17 March 2023; Volume 12481, p. 1248108. [Google Scholar] [CrossRef]
- Han, S.C.; An, J.; Moon, H. A remotely controlled out-pipe climbing robot. In Proceedings of the 2013 10th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, Republic of Korea, 30 October–2 November 2013; IEEE: Piscataway, NJ, USA, 2013; p. 126. [Google Scholar]
- Baghani, A.; Ahmadabadi, M.N.; Harati, A. Kinematics modeling of a wheel-based pole climbing robot (UT-PCR). In Proceedings of the Proceedings of the 2005 IEEE international Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; IEEE: Piscataway, NJ, USA, 2005; pp. 2099–2104. [Google Scholar]
- Mampel, J.; Gerlach, K.; Schilling, C.; Witte, H. A modular robot climbing on pipe-like structures. In Proceedings of the 2009 4th International Conference on Autonomous Robots and Agents, Wellington, New Zealand, 10–12 February 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 87–91. [Google Scholar]
- Adams, W. A Novel, Bio-Inspired, Soft Robot for Water Pipe Inspection. Master’s Thesis, Arizona State University, Tempe, AZ, USA, 2019. [Google Scholar]
- Savidge, J.A.; Seibert, T.F.; Kastner, M.; Jayne, B.C. Lasso locomotion expands the climbing repertoire of snakes. Curr. Biol. 2021, 31, R7–R8. [Google Scholar] [CrossRef] [PubMed]
- Jayne, B.C. What defines different modes of snake locomotion? Integr. Comp. Biol. 2020, 60, 156–170. [Google Scholar] [CrossRef]
- Jayne, B.C.; Newman, S.J.; Zentkovich, M.M.; Berns, H.M. Why arboreal snakes should not be cylindrical: Body shape, incline and surface roughness have interactive effects on locomotion. J. Exp. Biol. 2015, 218, 3978–3986. [Google Scholar] [CrossRef]
- O’Neill, C.T.; McCann, C.M.; Hohimer, C.J.; Bertoldi, K.; Walsh, C.J. Unfolding Textile-Based Pneumatic Actuators for Wearable Applications. Soft Robot. 2021, 9, 163–172. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, P.H.; Zhang, W. Design and Computational Modeling of Fabric Soft Pneumatic Actuators for Wearable Assistive Devices. Sci. Rep. 2020, 10, 9638. [Google Scholar] [CrossRef]
- Zhang, Z.; Long, Y.; Chen, G.; Wu, Q.; Wang, H.; Jiang, H. Soft and lightweight fabric enables powerful and high-range pneumatic actuation. Sci. Adv. 2024, 9, eadg1203. [Google Scholar] [CrossRef] [PubMed]
- Khin, P.M.; Yap, H.K.; Ang, M.H.; Yeow, C.H. Fabric-based actuator modules for building soft pneumatic structures with high payload-to-weight ratio. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 2744–2750. [Google Scholar] [CrossRef]
- Niiyama, R.; Sun, X.; Sung, C.; An, B.; Rus, D.; Kim, S. Pouch Motors: Printable Soft Actuators Integrated with Computational Design. Soft Robot. 2015, 2, 59–70. [Google Scholar] [CrossRef]
- Lee, H.; Oh, N.; Rodrigue, H. Expanding Pouch Motor Patterns for Programmable Soft Bending Actuation: Enabling Soft Robotic System Adaptations. IEEE Robot. Autom. Mag. 2020, 27, 65–74. [Google Scholar] [CrossRef]
- Zheng, Z.; Hu, S.; Ding, N. A Biologically Inspired Cable Climbing Robot: CCRobot—Design and Implementation. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 2354–2359. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mendoza, N.; Haghshenas-Jaryani, M. Combined Soft Grasping and Crawling Locomotor Robot for Exterior Navigation of Tubular Structures. Machines 2024, 12, 157. https://doi.org/10.3390/machines12030157
Mendoza N, Haghshenas-Jaryani M. Combined Soft Grasping and Crawling Locomotor Robot for Exterior Navigation of Tubular Structures. Machines. 2024; 12(3):157. https://doi.org/10.3390/machines12030157
Chicago/Turabian StyleMendoza, Nicolás, and Mahdi Haghshenas-Jaryani. 2024. "Combined Soft Grasping and Crawling Locomotor Robot for Exterior Navigation of Tubular Structures" Machines 12, no. 3: 157. https://doi.org/10.3390/machines12030157
APA StyleMendoza, N., & Haghshenas-Jaryani, M. (2024). Combined Soft Grasping and Crawling Locomotor Robot for Exterior Navigation of Tubular Structures. Machines, 12(3), 157. https://doi.org/10.3390/machines12030157