
Nonlinear Passive Observer for Motion Estimation in Multi-Axis Precision Motion Control



Abstract
1. Introduction
1.1. Review of Nonlinear Observers
1.2. Multi-Axis High-Precision Motion Control System
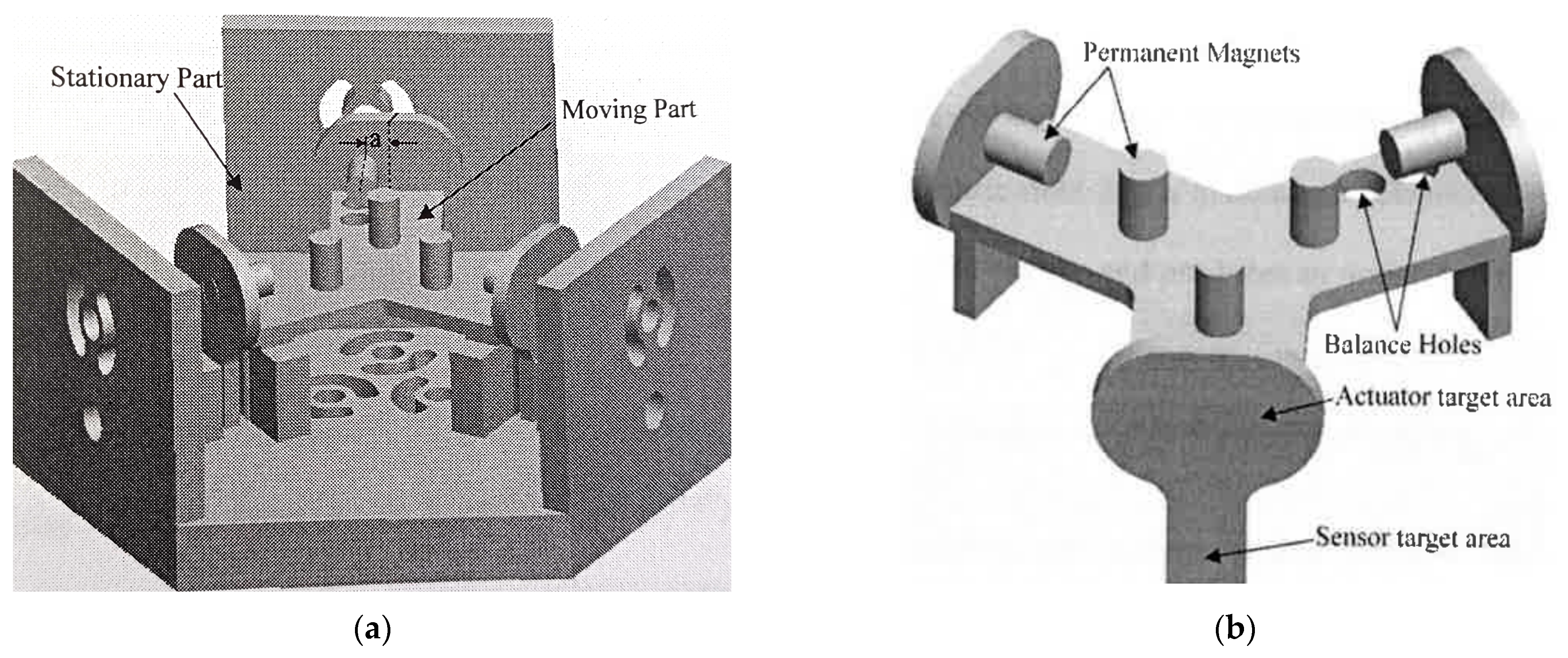
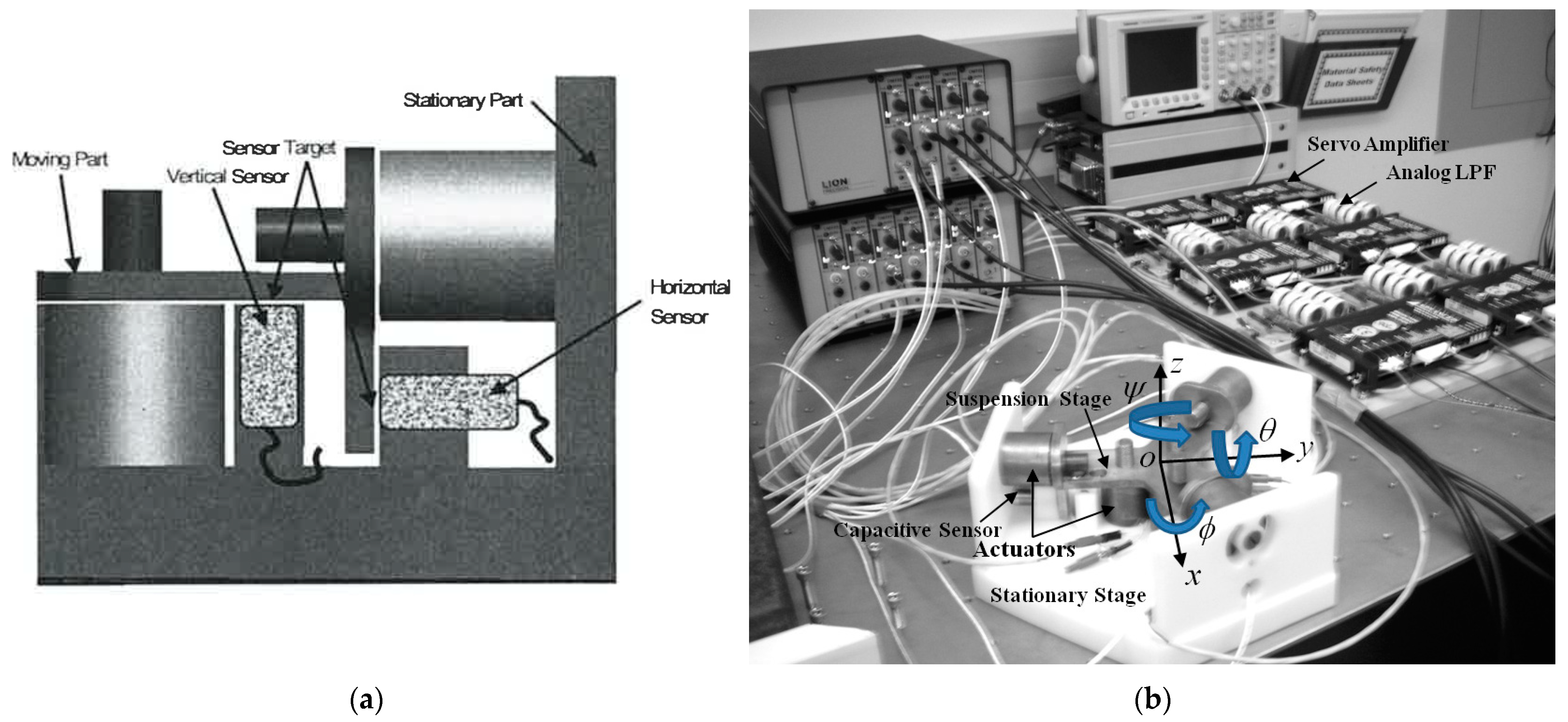
1.2.1. Electromagnetic Long-Range 6-DOF Motion Stage
1.2.2. Rigid Body Dynamics of the 6-DOF Motion Stage
1.2.3. Sliding Mode Controller Design of the 6-DOF Motion of the Moving Part
1.2.4. Nonlinear Observer Equations
1.2.5. Stability and Passivity of the Observer
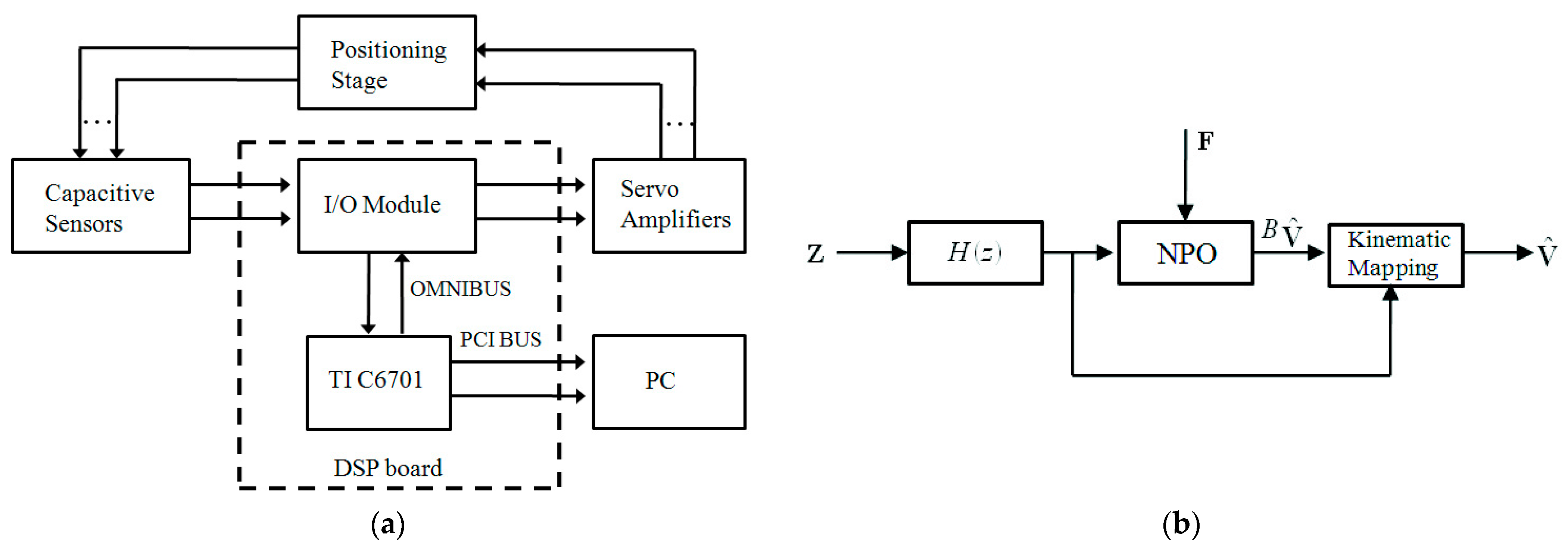
2. Materials and Methods
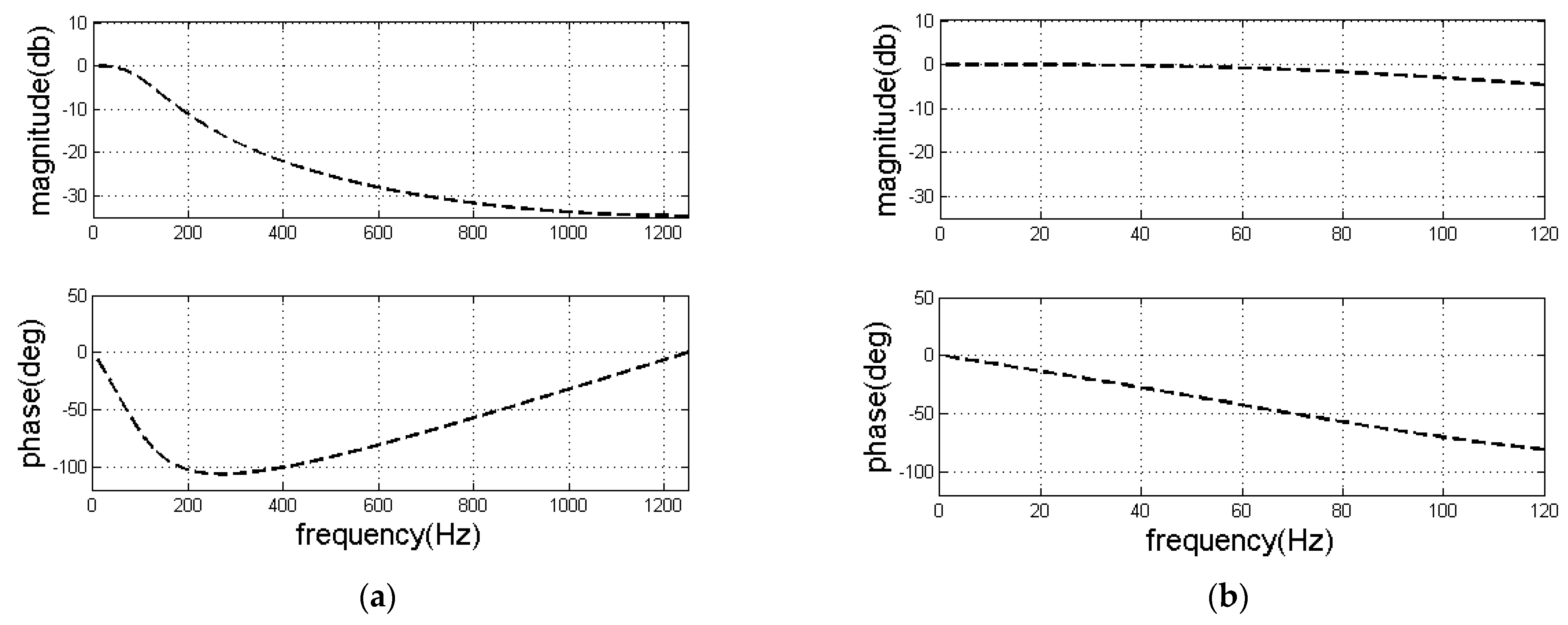
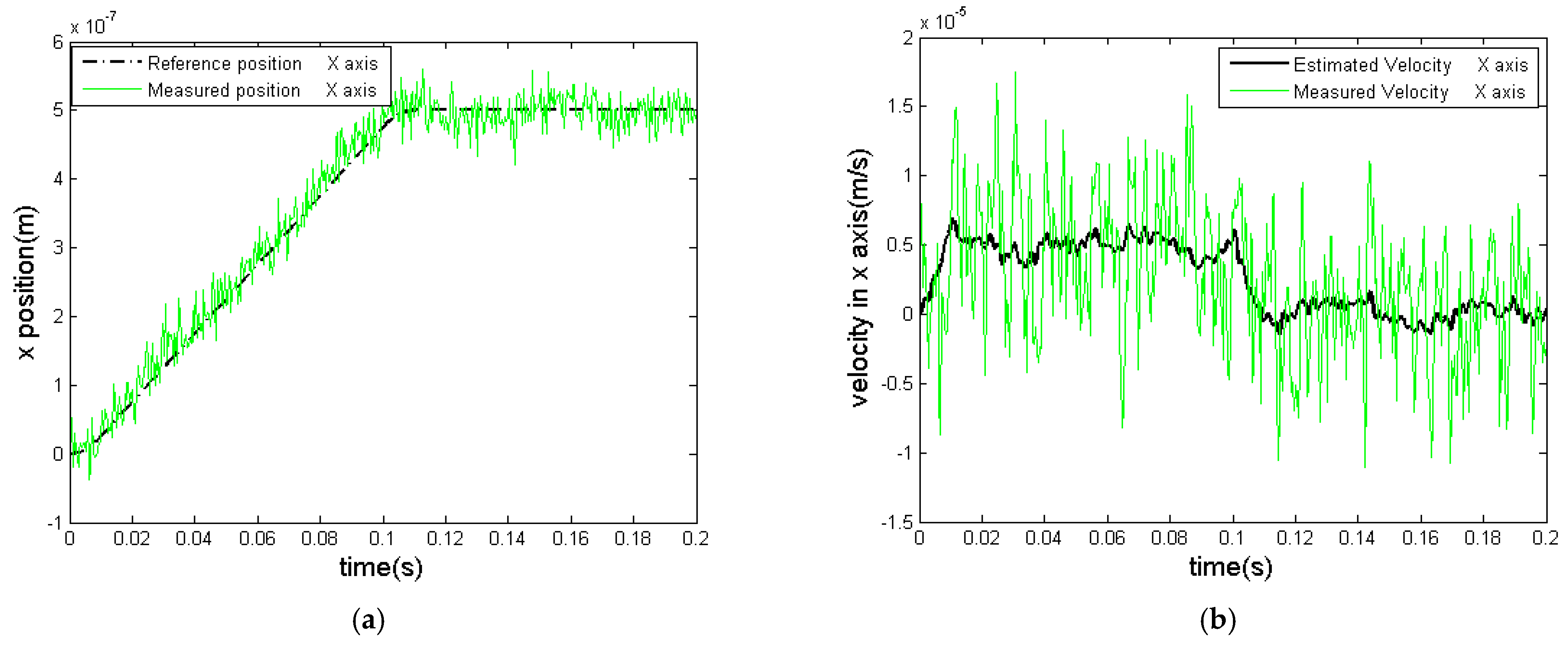
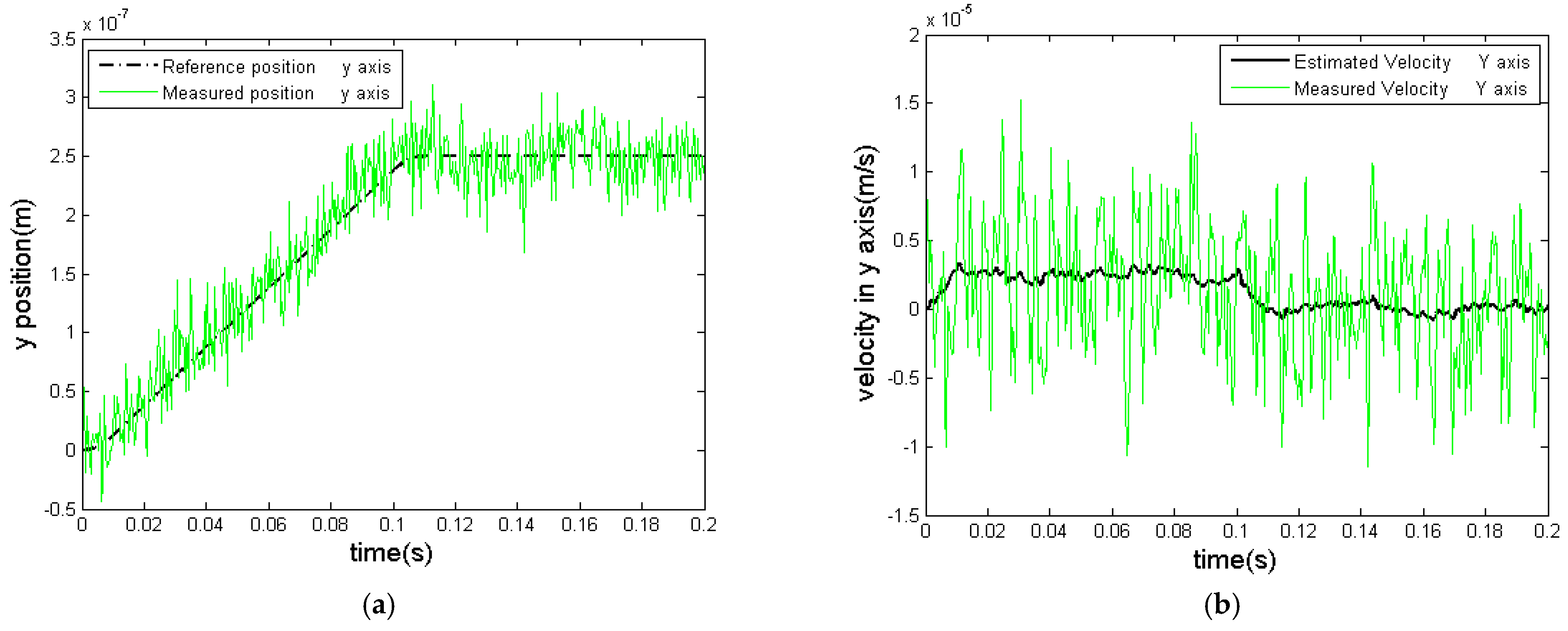
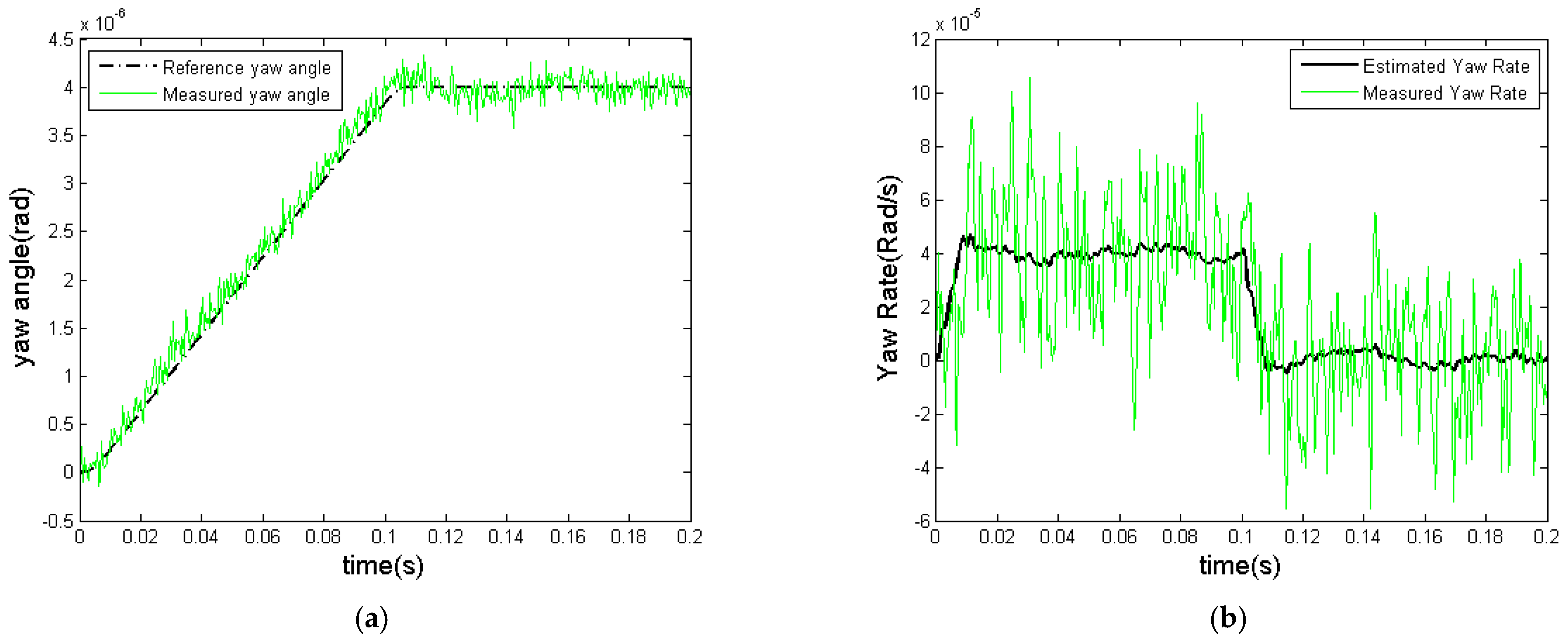
Implementation in the Presence of Position Measurement Noise
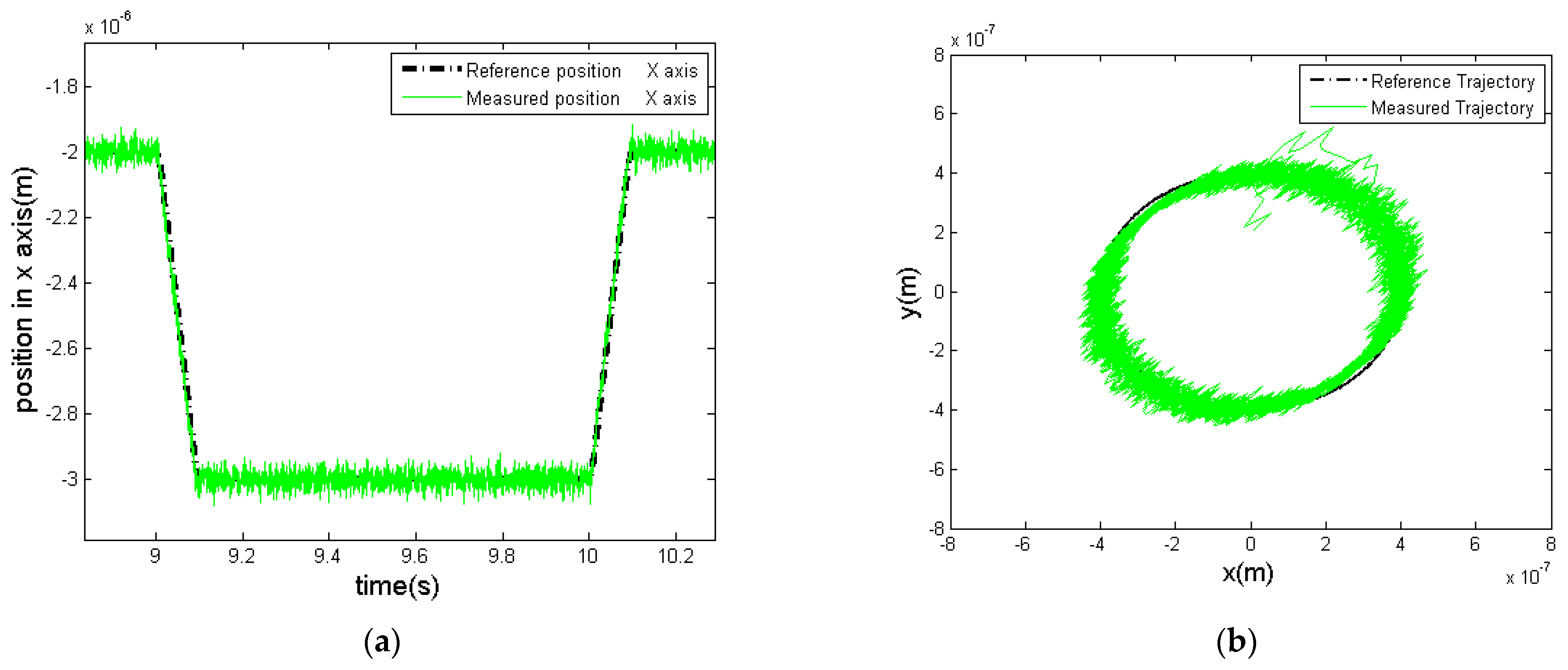
3. Results
Estimation of Reciprocating Motion and Synchronous Motion
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Gu, J.; Kim, W.-J.; Verma, S. Nanoscale motion control with a compact minimum-actuator magnetic levitator. ASME J. Dyn. Syst. Meas. Control 2005, 127, 433–442. [Google Scholar] [CrossRef]
- Kim, W.-J.; Trumper, D.L.; Lang, J.H. Modeling and vector control of planar magnetic levitator. IEEE Trans. Ind. Appl. 1998, 34, 1254–1262. [Google Scholar]
- Shakir, H.; Kim, W.-J. Nanoscale path planning and motion control with maglev positioners. IEEE/ASME Trans. Mechatron. 2006, 11, 625–633. [Google Scholar] [CrossRef]
- Shan, X.; Kuo, S.K.; Zhang, J.; Menq, C.H. Ultra precision motion control of a multiple degrees of magnetic suspension system. IEEE/ASME Trans. Mechatron. 2002, 7, 67–78. [Google Scholar] [CrossRef]
- Kuo, S.-K.; Menq, C.-H. Modeling and control of a six-axis precision motion control stage. IEEE/ASME Trans. Mechatron. February 2005, 10, 50–59. [Google Scholar] [CrossRef]
- Tai, T.-L.; Chen, J.-S. Discrete-time sliding-mode controller for dual-stage systems—A hierarchical approach. Mechatronics 2005, 15, 949–967. [Google Scholar] [CrossRef]
- Kim, H.M.; Park, S.H.; Han, S.I. Precise friction control for the nonlinear friction system using the friction state observer and sliding mode control with recurrent fuzzy neural networks. Mechatronics 2009, 19, 805–815. [Google Scholar] [CrossRef]
- Ludwick, S.J.; Trumper, D. Modeling and control of a six degree-of-freedom magnetic/fluidic motion control stage. IEEE Trans. Control Syst. Technol. 1996, 4, 553–564. [Google Scholar] [CrossRef]
- Hirvonen, M.; Pyrhonen, O.; Handroos, H. Adaptive nonlinear velocity controller for a flexible mechanism of a linear motor. Mechatronics 2006, 16, 279–290. [Google Scholar] [CrossRef]
- Onodera, R.; Mimura, N. Measurement of vehicle motion using a new 6-DOF motion sensor system–Angular velocity estimation with Kalman filter using motion characteristic of a vehicle. J. Robot. Mechatron. 2008, 20, 116–124. [Google Scholar] [CrossRef]
- Alasty, A.; Shabani, R. Nonlinear parametric identification of magnetic bearings. Mechatronics 2006, 16, 451–459. [Google Scholar] [CrossRef]
- Dini, P.; Saponara, S. Design of an Observer-Based Architecture and Non-Linear Control Algorithm for Cogging Torque Reduction in Synchronous Motors. Energies 2020, 13, 2077. [Google Scholar] [CrossRef]
- Dini, P.; Saponara, S. Model-Based Design of an Improved Electric Drive Controller for High-Precision Applications Based on Feedback Linearization Technique. Electronics 2021, 10, 2954. [Google Scholar] [CrossRef]
- Slotine, J.J.; Hedrick, J.K.; Misawa, E.A. On sliding observers for nonlinear systems. J. Dyn. Syst. Meas. Control 1987, 109, 245–252. [Google Scholar] [CrossRef]
- Lu, Y.-S.; Cheng, C.-M.; Cheng, C.-H. Non-overshooting PI control of variable-speed motor drives with sliding perturbation observers. Mechatronics 2005, 15, 1143–1158. [Google Scholar] [CrossRef]
- Emaru, T.; Imagawa, K.; Hoshino, Y.; Kobayashi, Y. Velocity and acceleration estimation by a nonlinear filter based on sliding mode and application to control system. J. Robot. Mechatron. 2009, 21, 590–596. [Google Scholar] [CrossRef]
- Mokhtari, A.; Benallegue, A.; Belaidi, A. Polynomial Linear Quadratic Gaussian and sliding mode observer for a quadrotor unmanned aerial vehicle. J. Robot. Mechatron. 2005, 17, 483–495. [Google Scholar] [CrossRef]
- Loria, A.; Fossen, T.I.; Panteley, E. A separation principle for dynamic positioning of ships: Theoretical and experimental results. IEEE Trans. Control Syst. Technol. 2000, 8, 332–343. [Google Scholar] [CrossRef]
- Dabroom, A.M.; Khalil, H.K. Discrete-time implementation of high-gain observers for numerical differentiation. Int. J. Control 1999, 72, 1523–1537. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Atassi, A.N.; Khalil, H.K. A separation principle for the stabilization of a class of nonlinear systems. IEEE Trans. Autom. Control 1999, 44, 1672–1687. [Google Scholar] [CrossRef]
- Nazrulla, M.S.; Khalil, H.K. Robust stabilization of non-minimum phase nonlinear systems using extended high gain observers. IEEE Trans. Autom. Control 2011, 56, 802–813. [Google Scholar] [CrossRef]
- Bando, M.; Ichikawa, A. Adaptive regulation of nonlinear systems by output feedback. J. Robot. Mechatron. 2008, 20, 719–725. [Google Scholar] [CrossRef]
- Willems, J.C. Dissipative dynamical systems—Part I: General theory. Arch. Ration. Mech. Anal. 1972, 45, 321–351. [Google Scholar] [CrossRef]
- Willems, J.C. Dissipative dynamical systems—Part II: Linear systems with quadratic supply rates. Arch. Ration. Mech. Anal. 1972, 45, 352–393. [Google Scholar] [CrossRef]
- Liu, W.; Wang, Z.; Chen, G.; Sheng, L. Passivity-based observer design and robust output feedback control for nonlinear uncertain systems. In Proceedings of the 9th Asian Control Conference, Istanbul, Turkey, 23–26 June 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Yang, X.; Liu, R.; Guo, L. A Robust Sliding Mode Observer for Dynamic Positioning System. In Proceedings of the 2019 IEEE 3rd Advanced Information Management, Communicates, Electronic and Automation Control Conference, Chongqing, China, 11–13 October 2019; pp. 85–90. [Google Scholar] [CrossRef]
- Xie, D.; Jia, B.; Ren, Y. Control System Design for Dynamic Positioning Ships Using Nonlinear Passive Observer Backstepping. In Proceedings of the 2018 Chinese Automation Congress, Xi’an, China, 30 November–2 December 2018; pp. 4221–4226. [Google Scholar] [CrossRef]
- Alvarez-Salas, R.; Gallegos, M.; Moreno, J.; Espinosa-Perez, G. A passive speed observer for induction motor. In Proceedings of the 6th International Conference on Electrical Engineering, Computing Science and Automatic Control, Toluca, Mexico, 10–13 January 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Almeida, J.; Loukianov, A.; Cañedo Castañeda, J. Passive observer-based control of synchronous generator. In Proceedings of the 2016 IEEE International Meeting on Power, Electronics and Computing, Ixtapa, Mexico, 9–11 November 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Snijders, J.; van der Woude, J.; Westhuis, J. Nonlinear Observer Design for Dynamic Positioning. In Proceedings of the Marine Technology Society Dynamic Positioning Conference, Houston, TX, USA, 15–16 November 2005. [Google Scholar]
- Liu, R.; Yang, X.; Jia, Y. Design of Nonlinear Observer for Ship Dynamic Positioning System. In Proceedings of the 2019 IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference, Chengdu, China, 15–17 March 2019; pp. 1339–1342. [Google Scholar] [CrossRef]
- Lin, X.; Li, H.; Liang, K.; Jiao, Y. Nonlinear passive robust observer design for a DP system based on ACA. In Proceedings of the 36th Chinese Control Conference, Dalian, China, 26–28 July 2017; pp. 474–481. [Google Scholar] [CrossRef]
- Xia, G.; Shao, X. Sliding mode control based on passive nonlinear observer for dynamic positioning vessels. In Proceedings of the 2011 International Conference on Mechatronic Science, Electric Engineering and Computer, Jilin, China, 19–22 August 2011; pp. 2156–2159. [Google Scholar] [CrossRef]
- Fossen, T.; Strand, J. Passive Nonlinear Observer Design for Ships Using Lyapunov Methods: Full-Scale Experiments with a Supply Vessel. Automatica 1999, 35, 3–28. [Google Scholar] [CrossRef]
- Xie, D.; Han, X.; Jia, B.; Liu, Y.; Zheng, S. Research on improved PID Dynamic Positioning System Based on Nonlinear Observer. In Proceedings of the 2018 Chinese Automation Congress, Xi’an, China, 30 November–2 December 2018; pp. 698–702. [Google Scholar] [CrossRef]
- Tong, X.; Chen, M.; Yang, F. Passive and Explicit Attitude and Gyro-Bias Observers Using Inertial Measurements. IEEE Trans. Ind. Electron. 2021, 68, 8942–8952. [Google Scholar] [CrossRef]
- Li, D.; Gutierrez, H. Quasi-sliding mode control of a high precision hybrid magnetic suspension actuator. J. Robot. Mechatron. 2013, 25, 192–200. [Google Scholar] [CrossRef]
- Li, D. Modeling and Control of a High Precision 6-DOF Maglev Positioning Stage with Large Range of Travel. Ph.D. Dissertation, Florida Institute of Technology, Melbourne, FL, USA, December 2008. [Google Scholar]
- Wang, Y.; Pan, T.; Wong, D.; Tan, F. An Extended State Observer-Based Run to Run Control for Semiconductor Manufacturing Processes. IEEE Trans. Semicond. Manuf. 2019, 32, 154–162. [Google Scholar] [CrossRef]
- Lee, A.; Pan, Y.; Hsieh, M. Output Disturbance Observer Structure Applied to Run-to-Run Control for Semiconductor Manufacturing. IEEE Trans. Semicond. Manuf. 2011, 24, 27–43. [Google Scholar] [CrossRef]
- Tsai, M.; Peng, C. Sliding Mode Observer Based Multi-Layer Metal Plates Core Temperature On-Line Estimation for Semiconductor Intelligence Manufacturing. IEEE Access 2020, 8, 194561–194574. [Google Scholar] [CrossRef]
- Li, D.; Gutierrez, H. Precise motion control of a hybrid magnetic suspension actuator with large travel. In Proceedings of the 34th IEEE Annual Conference on Industrial Electronics, IECON 2008, Orlando, FL, USA, 10–13 November 2008; pp. 2661–2666. [Google Scholar]
- Li, D.; Gutierrez, H. Observer-based sliding mode control of a 6-DOF precision maglev positioning stage. In Proceedings of the 34th IEEE Annual Conference on Industrial Electronics, IECON 2008, Orlando, FL, USA, 10–13 November 2008; pp. 2562–2567. [Google Scholar]
- Hu, T.; Kim, W.-J. Extended range six DOF high-precision positioner for wafer processing. IEEE/ASME Trans. Mechatron. 2006, 11, 682–689. [Google Scholar] [CrossRef]
- Jung, K.S.; Lee, S.H. Contact-free planar stage using linear induction principle. Mechatronics 2010, 20, 518–526. [Google Scholar] [CrossRef]
- Estevez, P.; Mulder, A.; Munnig Schmidt, R.H. 6-DoF miniature maglev positioning stage for application in haptic micro-manipulation. Mechatronics 2012, 22, 1015–1022. [Google Scholar] [CrossRef]
- Jung, K.S.; Baek, Y.S. Development of a novel maglev positioner with self-stabilizing property. Mechatronics 2002, 12, 771–790. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Range of motion <X,Y,Z> | +/−0.001 | m |
| Mass | kg | |
| Inertia | , , |
| NPO | LPF |
|---|---|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gutierrez, H.; Li, D. Nonlinear Passive Observer for Motion Estimation in Multi-Axis Precision Motion Control. Machines 2024, 12, 376. https://doi.org/10.3390/machines12060376
Gutierrez H, Li D. Nonlinear Passive Observer for Motion Estimation in Multi-Axis Precision Motion Control. Machines. 2024; 12(6):376. https://doi.org/10.3390/machines12060376
Chicago/Turabian StyleGutierrez, Hector, and Dengfeng Li. 2024. "Nonlinear Passive Observer for Motion Estimation in Multi-Axis Precision Motion Control" Machines 12, no. 6: 376. https://doi.org/10.3390/machines12060376
APA StyleGutierrez, H., & Li, D. (2024). Nonlinear Passive Observer for Motion Estimation in Multi-Axis Precision Motion Control. Machines, 12(6), 376. https://doi.org/10.3390/machines12060376