
The Design of Decoupled Robotic Arm Based on Chain Transmission


Abstract
:1. Introduction
2. Materials and Methods
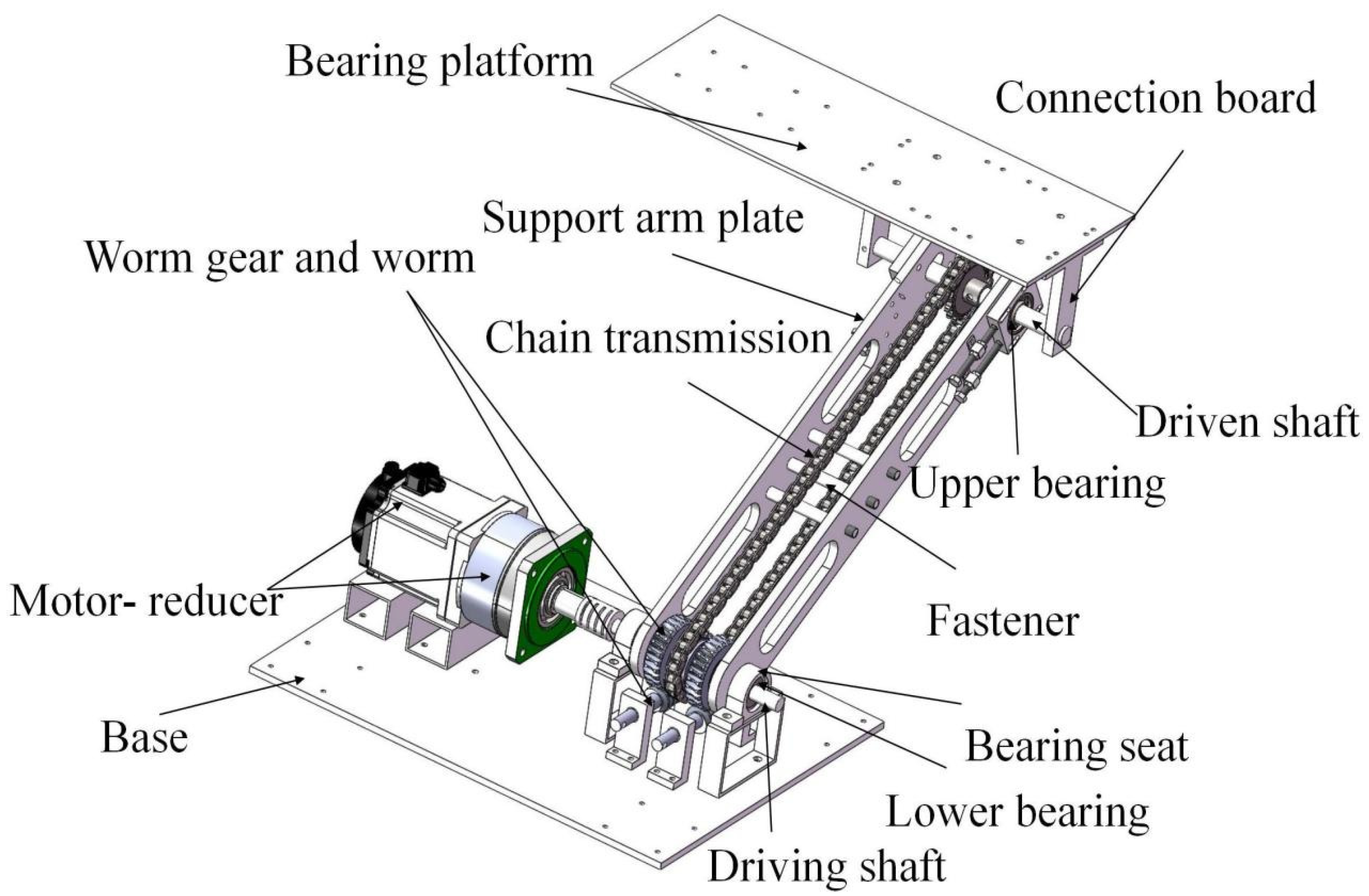
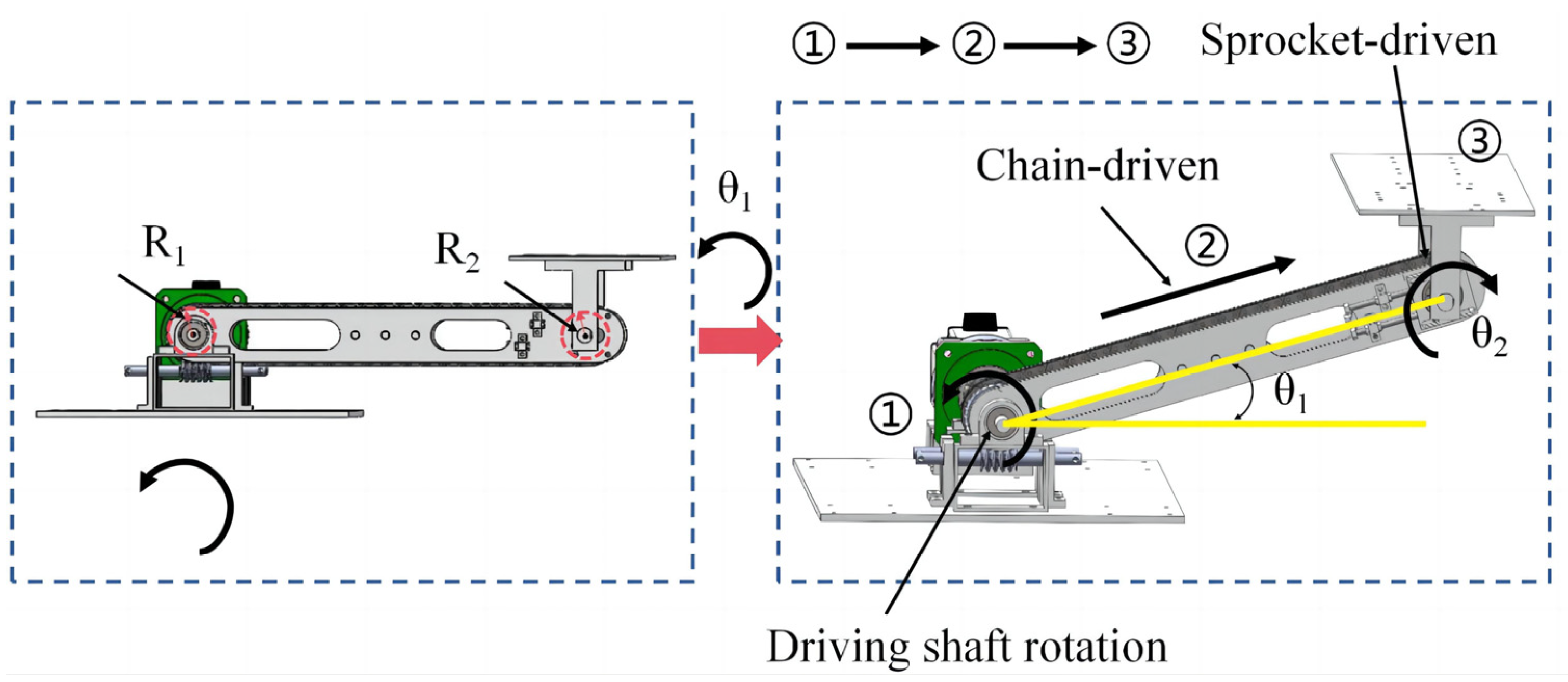
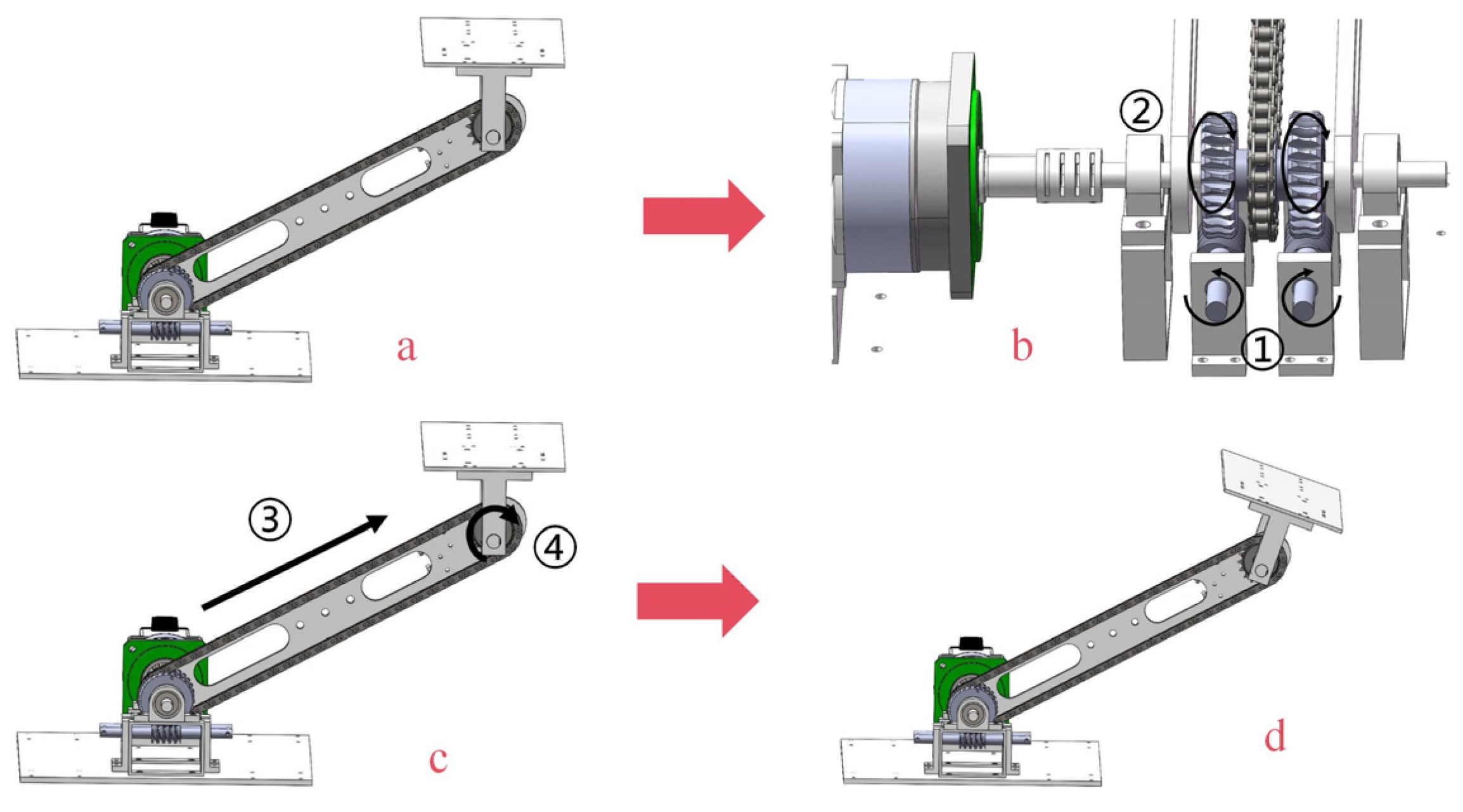
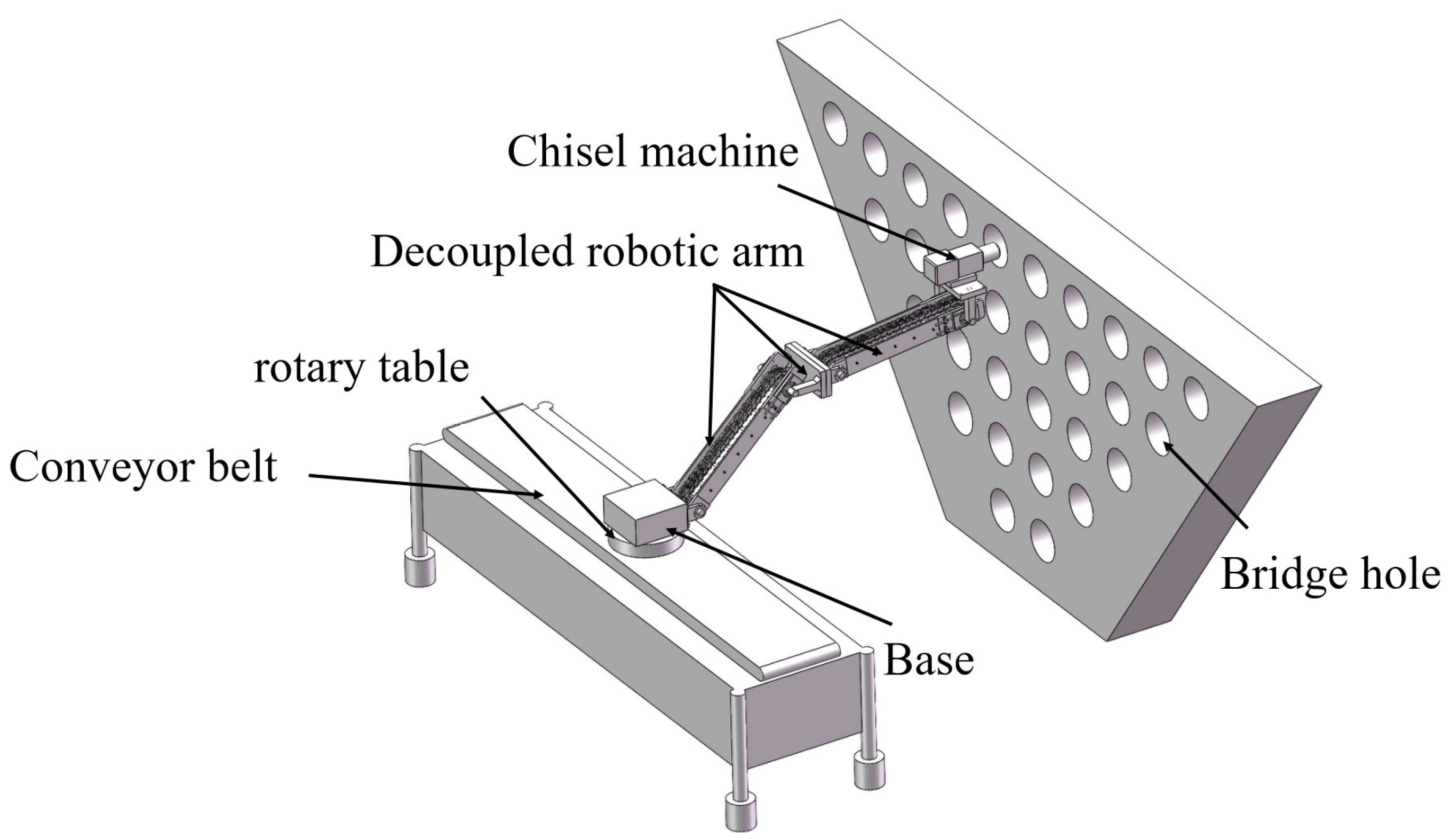
2.1. Chain-Driven Decoupled Robotic Arm System Structure Design
2.2. Single-Section Arm Drive Mechanism Design
2.2.1. Sprocket-Chain Selection
2.2.2. Motor-Reducer Selection
2.3. Two-Section Arm Drive Mechanism Design
2.3.1. Sprocket-Chain Selection
2.3.2. Motor-Reducer Selection
2.4. Combination Wheel Design
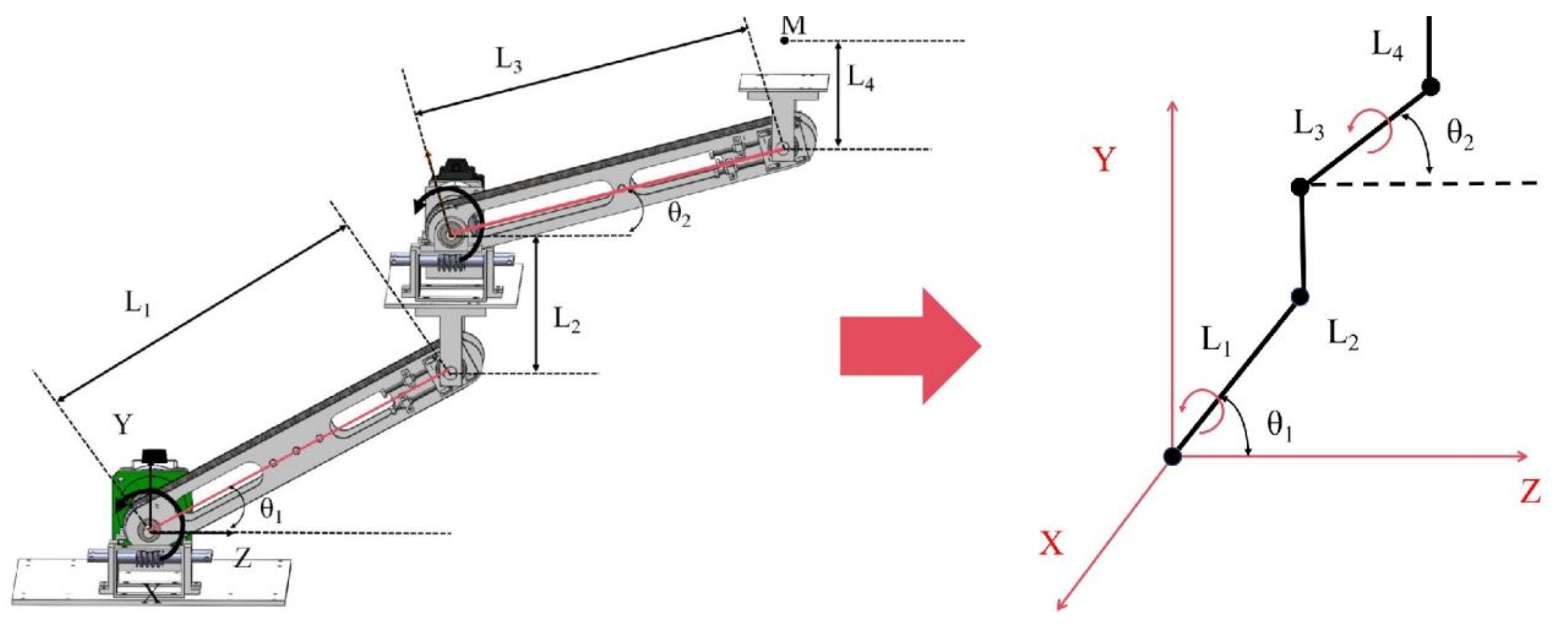
3. Kinematic Analysis
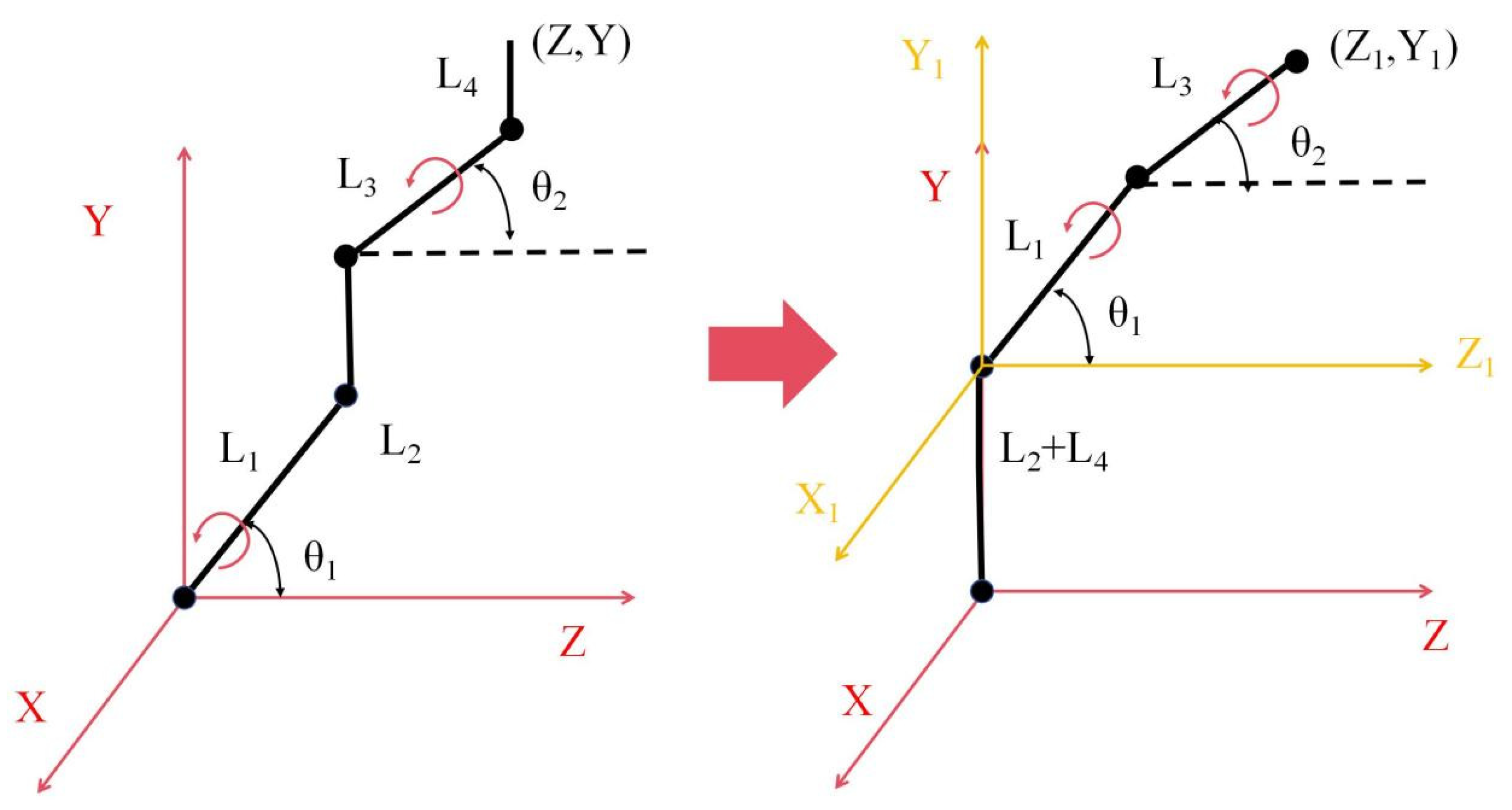
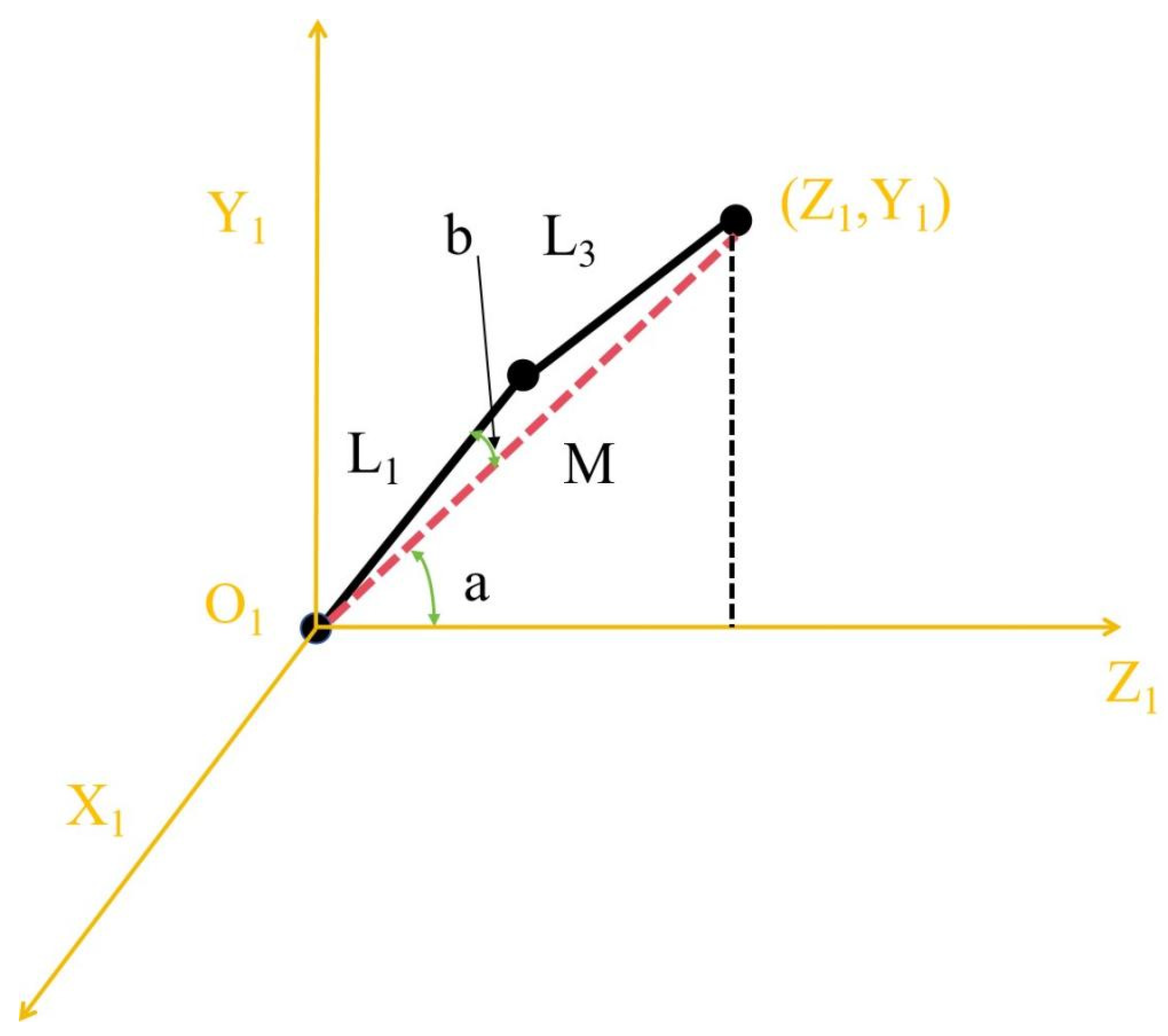
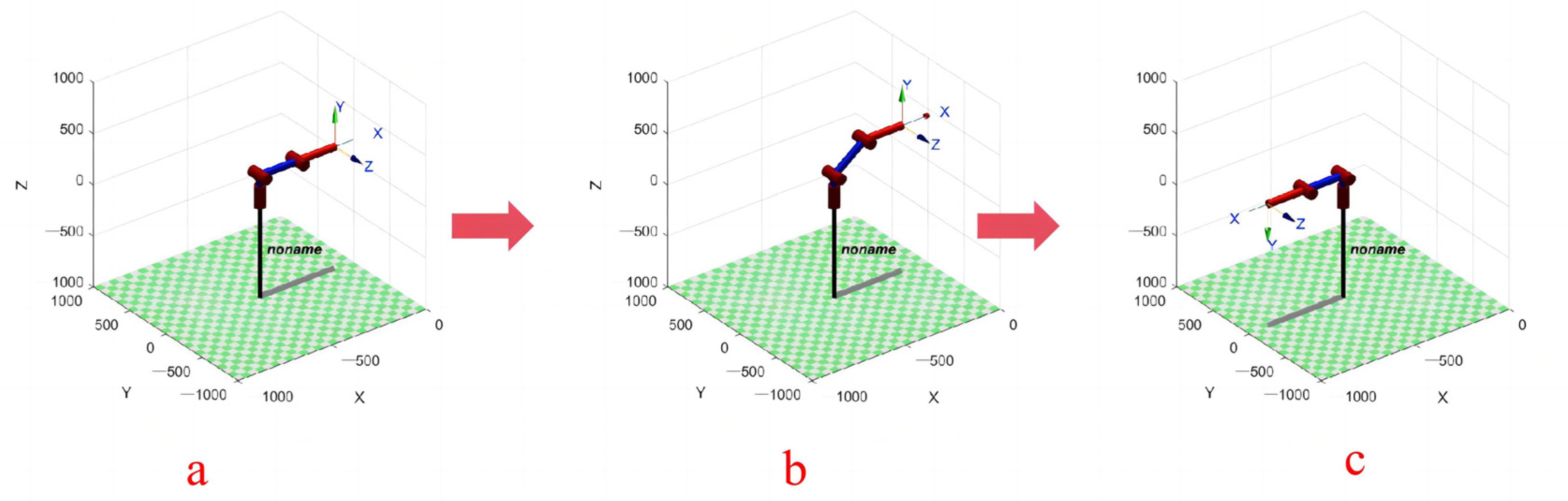
3.1. Forward and Inverse Kinematics
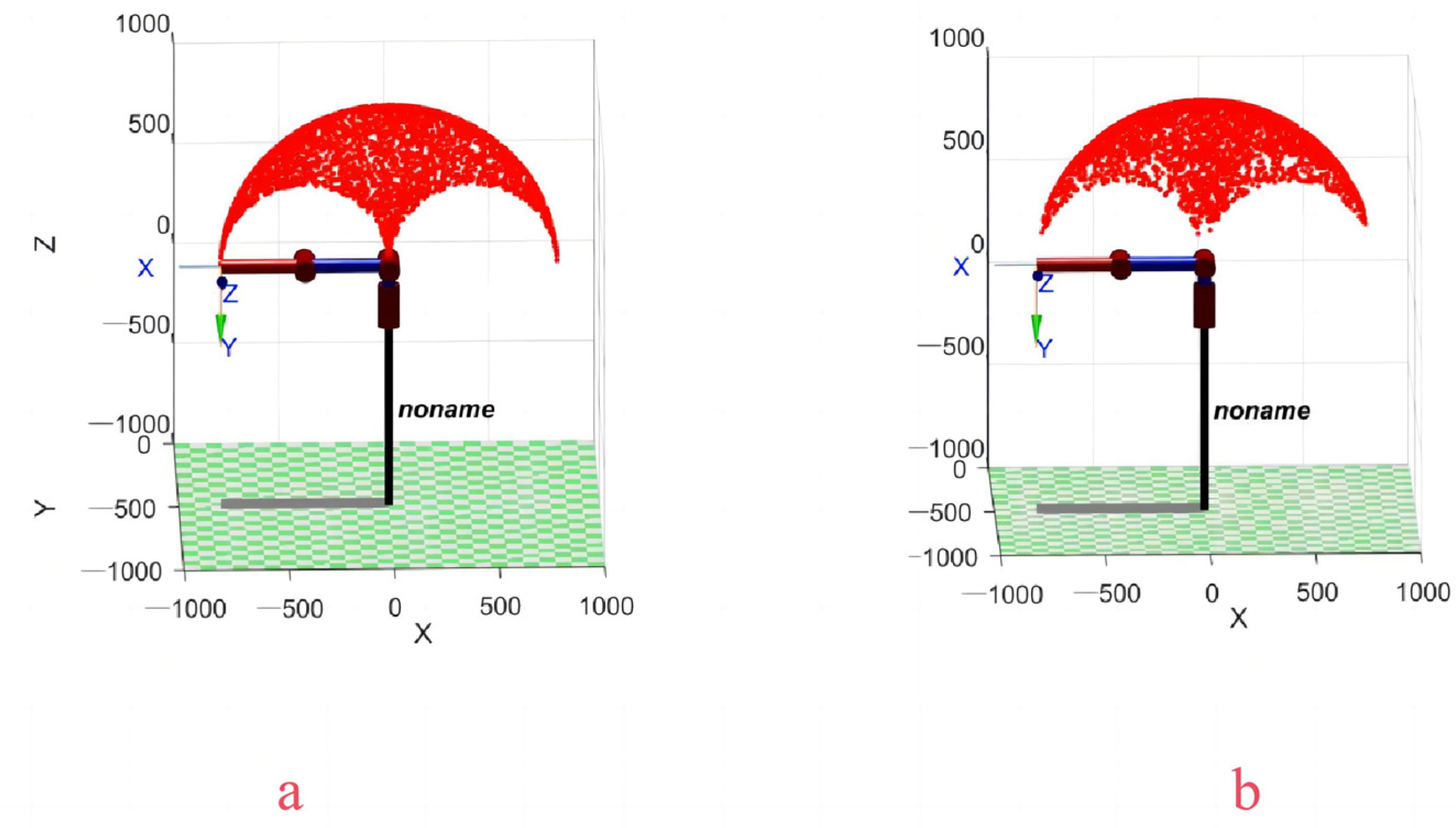
3.2. Workspace Analysis
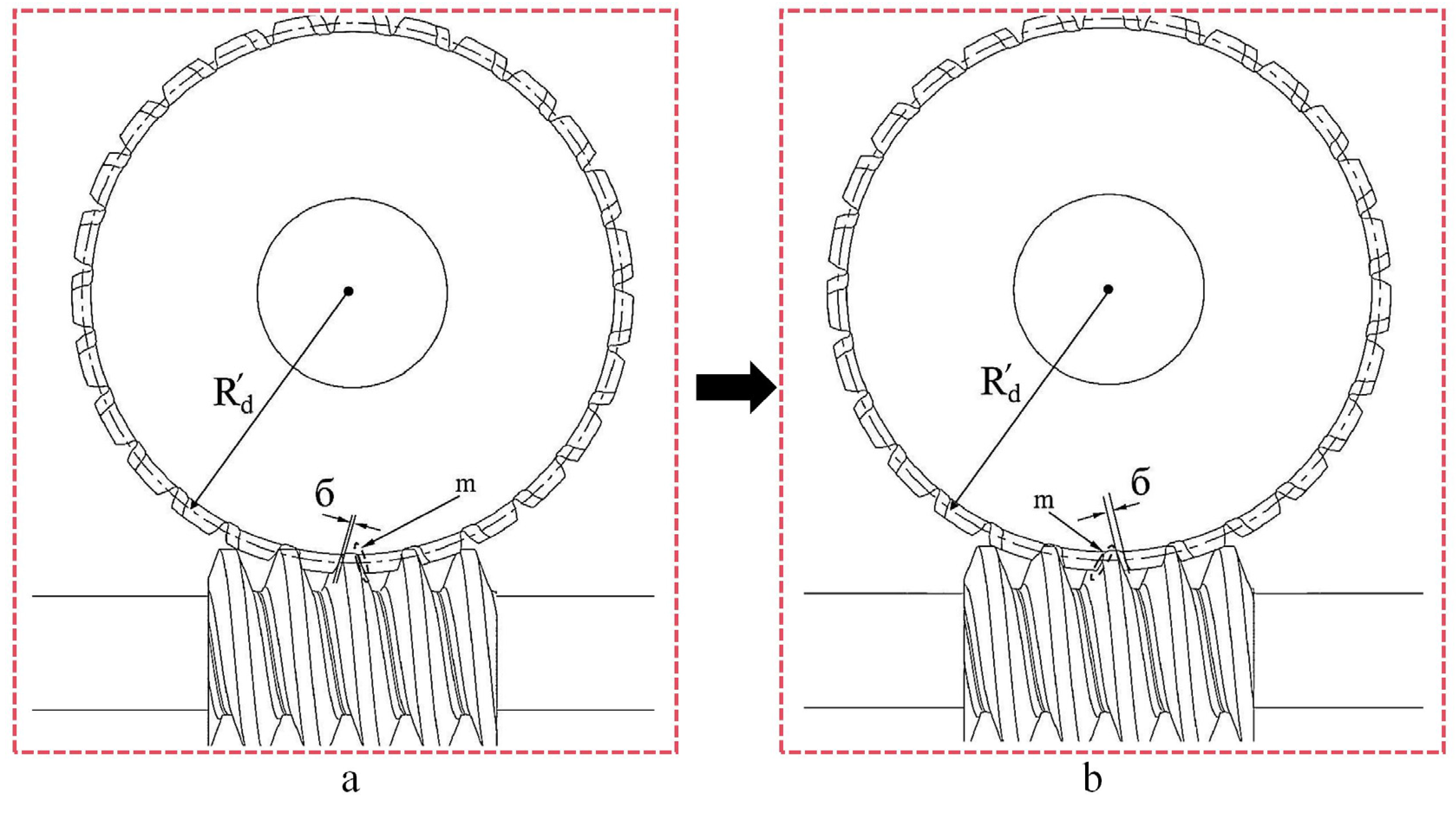
4. Engagement Clearance Error Analysis
4.1. Engagement Error of Single-Section Arms
4.2. Engagement Error of the Two-Section Robotic Arm
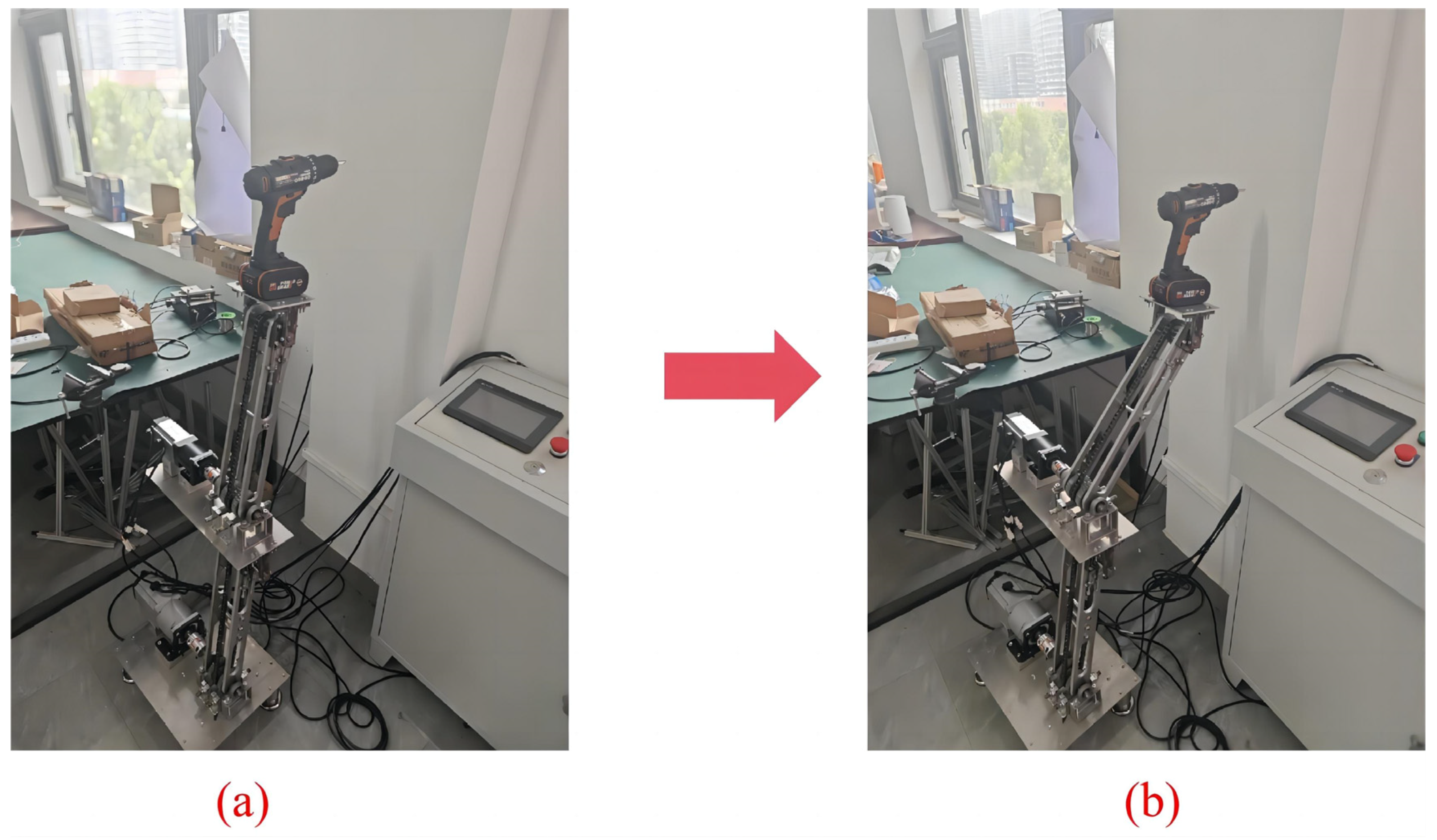
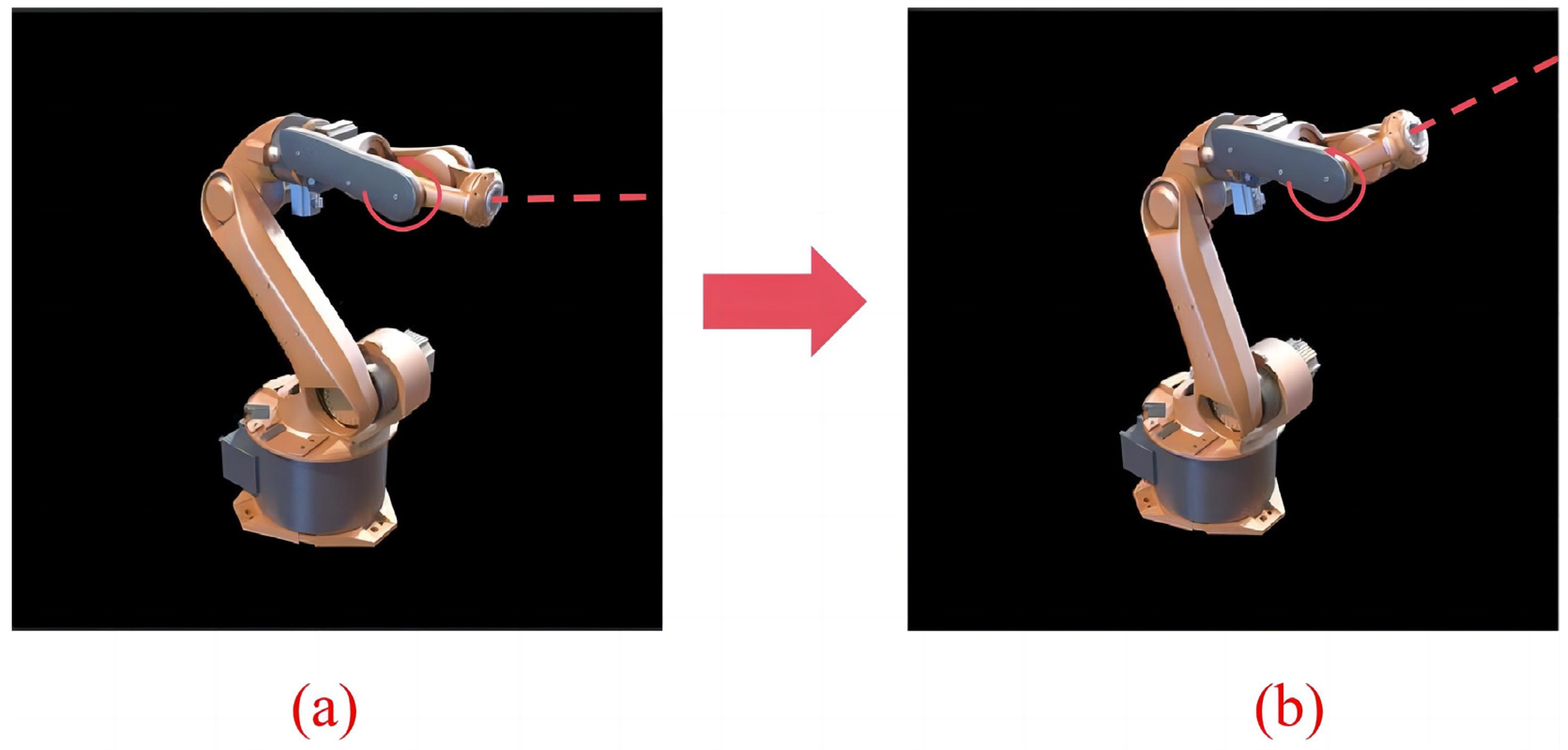
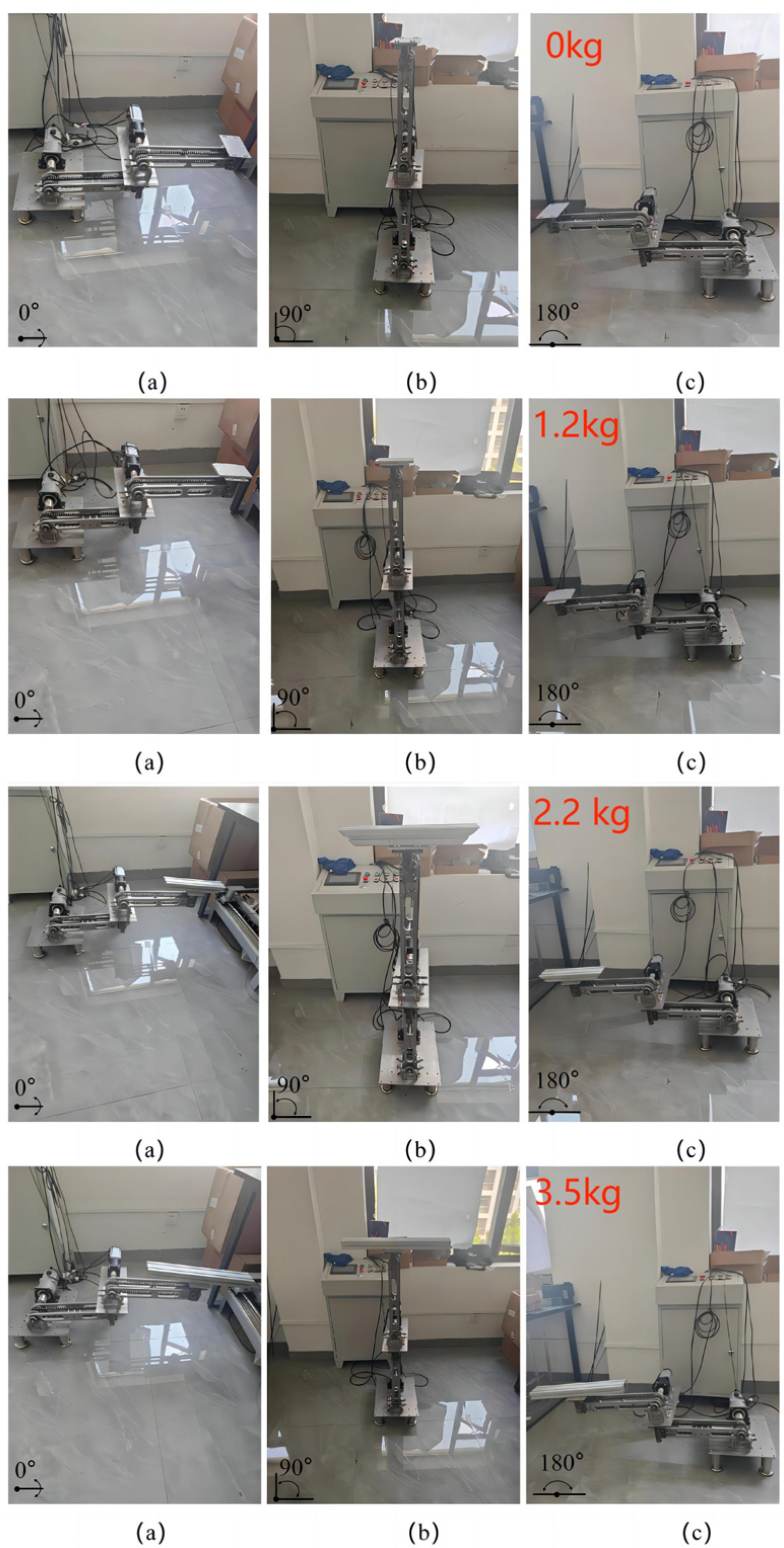
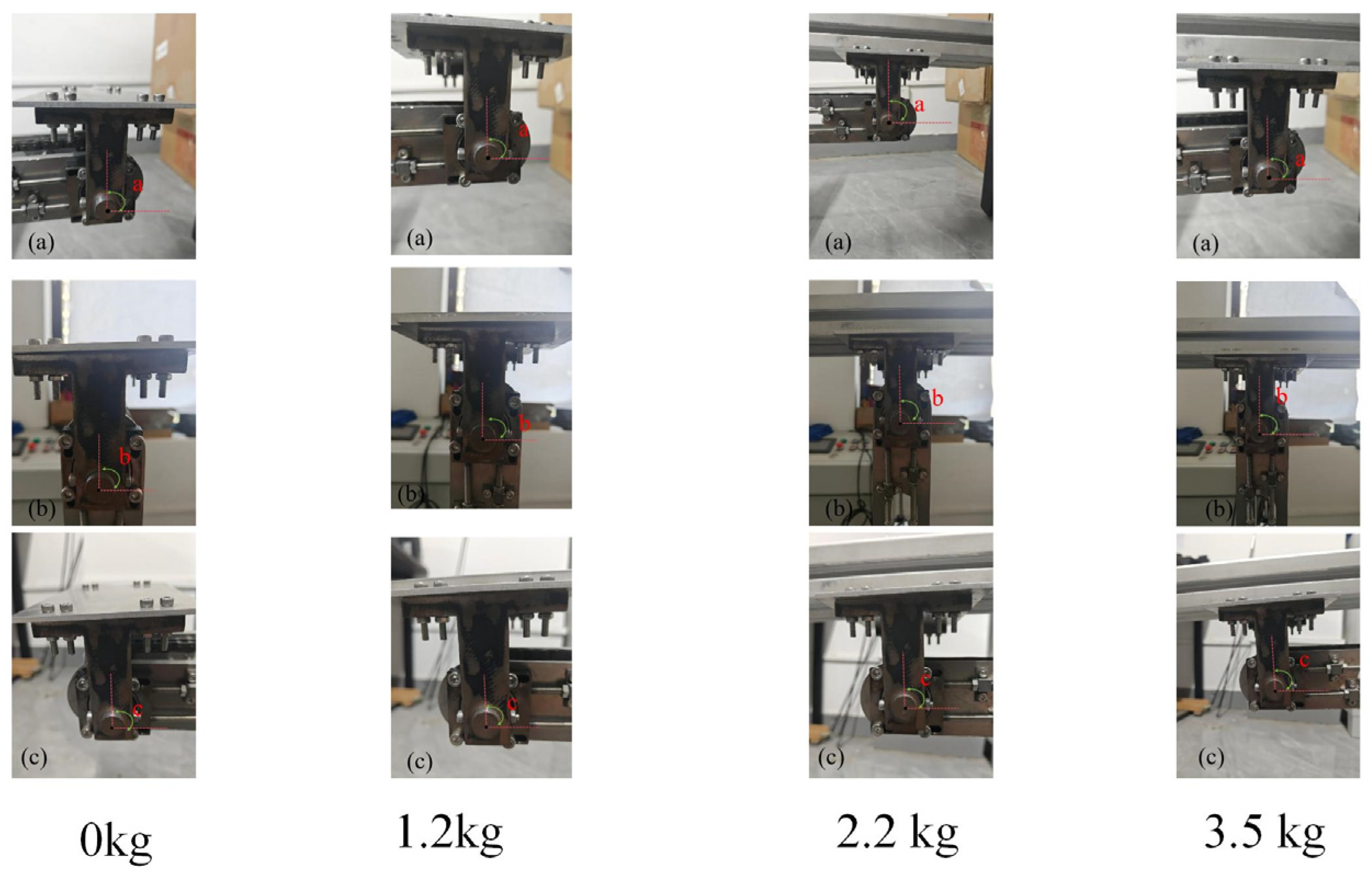
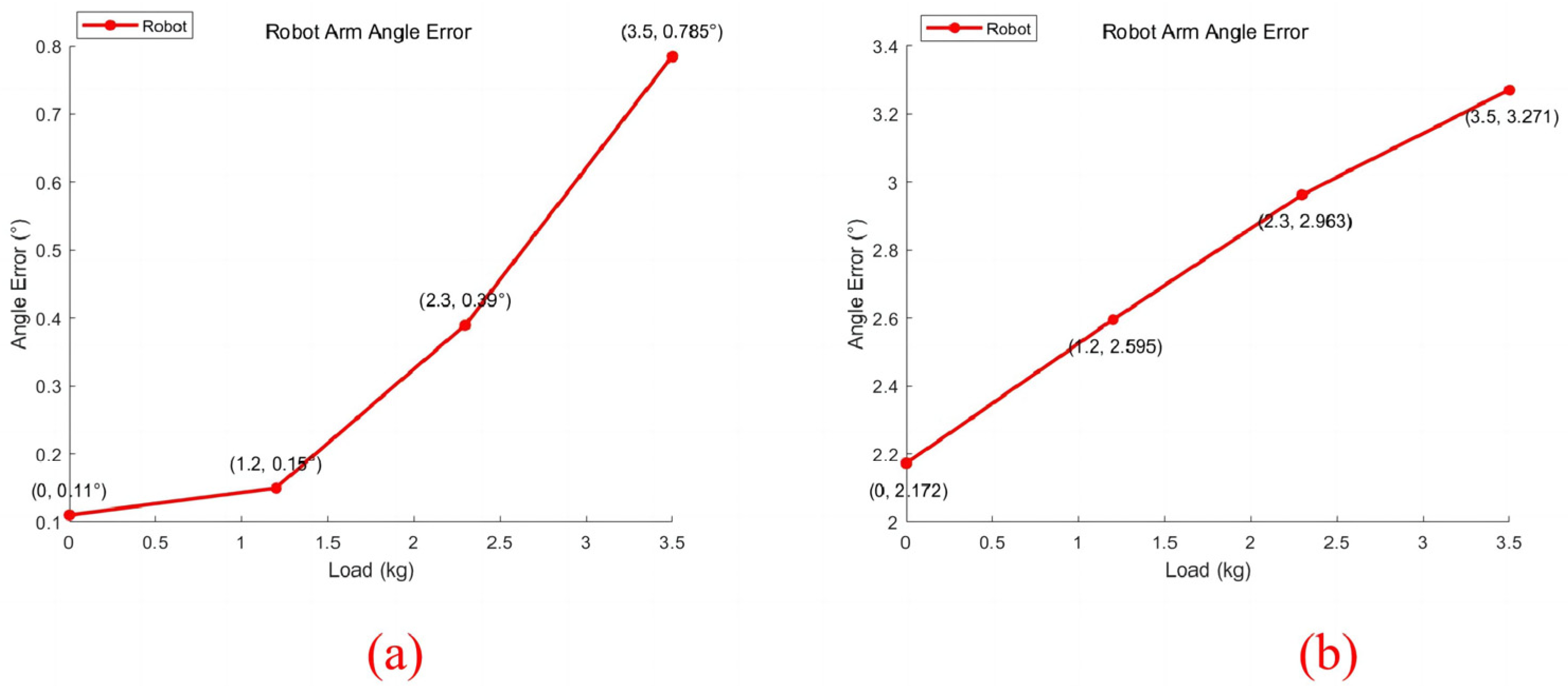
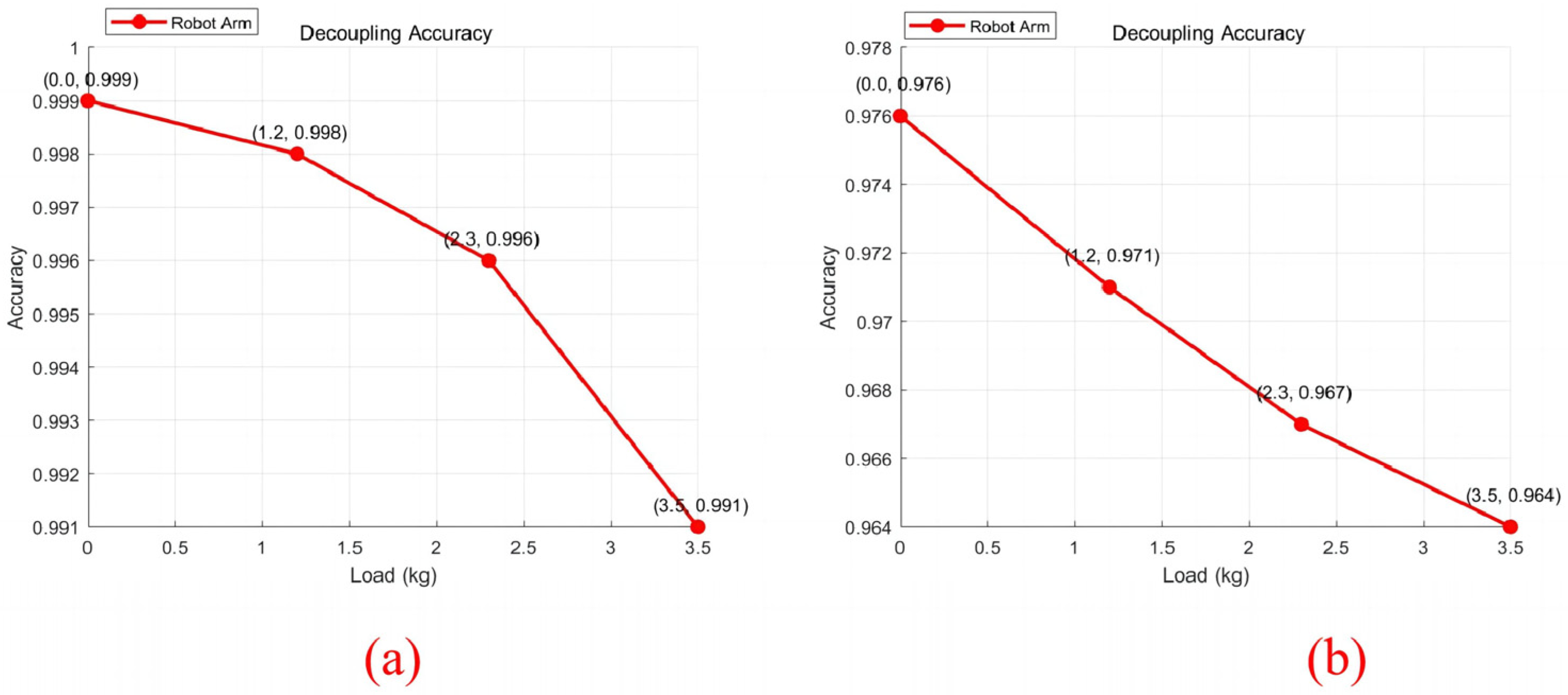
5. Experiments
6. Conclusions and Future Work
6.1. Conclusions
6.2. Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Nao, E.; Avi, C.; David, Z. Modeling, simulation, and experiments of a flexible track robot over rigid horizontal and inclined surfaces. Mech. Mach. Theory 2024, 11, 105689. [Google Scholar]
- Taylan, A.; Evren, S. A robotic gripper for picking up two objects simultaneously. Mech. Mach. Theory 2018, 121, 583–597. [Google Scholar]
- Salvatore, D.; Carlo, A.; Paolo, T. ROS-Industrial based robotic cell for Industry 4.0: Eye-in-hand stereo camera and visual servoing for flexible, fast, and accurate picking and hooking in the production line. Robot. Comput.-Integr. Manuf. 2023, 80, 102453. [Google Scholar]
- Liu, Y.; Yi, W.; Feng, Z.; Yao, J.; Zhao, Y. Design and motion planning of a 7-DOF assembly robot with heavy load in spacecraft module. Robot. Comput.-Integr. Manuf. 2024, 86, 102645. [Google Scholar] [CrossRef]
- Manoonpong, P.; Rajabi, H.; Larsen, J.C.; Raoufi, S.S.; Asawalertsak, N.; Homchanthanakul, J.; Tramsen, H.T.; Darvizeh, A.; Gorb, S.N. Fin Ray Crossbeam Angles for Efficient Foot Design for Energy-Efficient Robot Locomotion. Systems. Adv. Intell. Syst. 2022, 4, 102645. [Google Scholar]
- Zhou, X.; Wang, X.; Xie, Z.; Li, F.; Gu, X. Online obstacle avoidance path planning and application for arc welding robot. Robot. Comput. Manuf. 2022, 78, 102413. [Google Scholar] [CrossRef]
- Cai, Z.; Deng, S.; Liao, H.; Zeng, C.; Montavon, G. The Effect of Spray Distance and Scanning Step on the Coating Thickness Uniformity in Cold Spray Process. J. Therm. Spray Technol. 2014, 23, 354–362. [Google Scholar] [CrossRef]
- Zhang, R.; Wu, J.; Wang, Y. Stability analysis of a novel mobile spray-painting robot for touch-up painting in vehicle repair plant. J. Mech. Sci. Technol. 2022, 36, 2571–2584. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, D.; Zhao, C.; Zhang, H.; Yan, H. Singularity analysis and treatment for a 7R 6-DOF painting robot with non-spherical wrist. Mech. Mach. Theory 2018, 126, 92–107. [Google Scholar] [CrossRef]
- Qi, Y.Q.; Li, Y.W.; Chen, Z.M.; Kong, F.D.; Yang, X.K.; Zhu, W.G. Dseign and kinematics’analying of a serial nine-degree-of-freedom spraying robot. J. Mech. Eng. 2021, 56, 165–171. (In Chinese) [Google Scholar]
- Xu, F.; Zi, B.; Yu, Z.; Zhao, J.; Ding, H. Design and implementation of a 7-DOF cable-driven serial spray-painting robot with motion-decoupling mechanisms. Mech. Mach. Theory 2024, 192, 105549. [Google Scholar] [CrossRef]
- Wang, L.; Fang, Y.F.; Zhang, D. Design of 4-DOF hybrid parallel robots with an integrated three-fingered robot end effector. Mech. Mach. Theory 2023, 189, 105443. [Google Scholar] [CrossRef]
- Qian, L.; Liu, P.; Lu, H.; Shi, J.; Zhao, X. An End-to-End Inclination State Monitoring Method for Collaborative Robotic Drilling Based on Resnet Neural Network. Sensors 2024, 24, 1095. [Google Scholar] [CrossRef] [PubMed]
- Qian, J.; Su, Q.; Zhang, F.; Ma, Y.; Fang, Z.; Xu, B. Static Deformation-Compensation Method Based on Inclination-Sensor Feedback for Large-Scale Manipulators with Hydraulic Actuation. Processes 2020, 8, 81. [Google Scholar] [CrossRef]
- Liu, X.J.; Li, J.; Zhou, Y.H. Kinematic optimal design of a 2-degree-of-freedom 3-parallelogram planar parallel manipulator. Mech. Mach. Theory 2015, 8, 1–17. [Google Scholar] [CrossRef]
- Chai, M.; Yuan, Y.; Zhao, W. An improved particle swarm optimization algorithm for dynamic analysis of chain drive based on multidisciplinary design optimization. Adv. Mech. Eng. 2019, 11, 1687814019829611. [Google Scholar] [CrossRef]
- Fuglede, N.; Thomsen, J.J. Kinematics of roller chain drives—Exact and approximate analysis. Mech. Mach. Theory 2016, 100, 17–32. [Google Scholar] [CrossRef]
- Grinschgl, M.; Reich, F.; Abeltshauser, R.; Eder, M.; Antretter, T. New approach for the simulation of chain drive dynamics with consideration of the elastic environment. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2017, 231, 103–120. [Google Scholar] [CrossRef]
- Fuglede, N.; Thomsen, J.J. Kinematic and dynamic modeling and approximate analysis of a roller chain drive. J. Sound Vib. 2016, 366, 447–470. [Google Scholar] [CrossRef]
- Wang, W.; Liu, H.; Cai, G.; Zhang, P. Design and simulation analysis of inner-outer compound meshing silent-chain plate. J. Mech. Sci. Technol. 2023, 37, 4757–4766. [Google Scholar] [CrossRef]
- Yang, J.; Feng, Z.; Gao, H.; Wang, T.; Xu, K. Multibody dynamics analysis of a silent chain drive timing system. J. Mech. Sci. Technol. 2023, 37, 1653–1664. [Google Scholar] [CrossRef]
- Cheng, Y.; An, L.; Yin, S.; Wang, X. Multi-variation characteristic of dual phase Hy-Vo silent chain transmission system. Mech. Mach. Theory 2016, 103, 40–50. [Google Scholar] [CrossRef]
- Cheng, Y.; Wang, X.; Liu, H.; Gao, W.; Zhang, J. Research on multi-variation coupling effect of heart-shaped dual phase Hy-Vo silent chain system. Adv. Eng. Softw. 2017, 107, 1–6. [Google Scholar] [CrossRef]
- Ridremont, T.; Singh, I.; Bruzek, B.; Erel, V.; Jamieson, A.; Gu, Y.; Merzouki, R.; Wijesundara, M.B.J. Soft Robotic Bilateral Rehabilitation System for Hand and Wrist Joints. Machines 2024, 12, 288. [Google Scholar] [CrossRef]
- Zhang, G.; Li, S.; Wu, Y.; Zhu, M. An Investigation on the Grasping Position Optimization-Based Control for Industrial Soft Robot Manipulator. Machines 2021, 9, 363. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name of Core Parameter | Design Result |
|---|---|
| Support arm plate | 454 × 54 × 8 mm |
| The first section of the robotic arm end load platform | 405 × 150 × 5 mm |
| The second section of the robotic arm end load platform | 145 × 150 × 5 mm |
| The first section of the robotic arm motor-reducer | 90 servo motor with 1:50 reduction ratio |
| The second section of the robot arm motor-reducer Sprocket Chain Center distance of the first section of the robot arm Length of the first section arm driven shaft to the second section arm driven shaft Center distance of the second section of the robot arm Total weight Rated load Engagement clearance of sprocket chain Engagement clearance of the worm gear | 60 servo motor with 1:36 reduction ratio 06B-17 teeth 06B-99 sections 400 mm 200 mm 400 mm 13.8 kg 4 kg 0.6 mm 0.25 mm |
| Angle | 1 | 2 | 3 | 4 | 5 | Mean |
|---|---|---|---|---|---|---|
| a | 89.851° | 89.982° | 89.775° | 89.711° | 89.661° | 89.796° |
| b | 89.605° | 89.894° | 89.951° | 89.862° | 90.119° | 89.906° |
| c | 91.942° | 92.156° | 91.821° | 91.759° | 92.161° | 91.968° |
| Angle | 1 | 2 | 3 | 4 | 5 | Mean |
|---|---|---|---|---|---|---|
| a | 89.862° | 89.541° | 89.618° | 89.636° | 89.728° | 89.629° |
| b | 89.787° | 89.695° | 89.841° | 89.765° | 89.681° | 89.747° |
| c | 92.167° | 92.233° | 92.091° | 91.350° | 92.281° | 92.224° |
| Angle | 1 | 2 | 3 | 4 | 5 | Mean |
|---|---|---|---|---|---|---|
| a | 89.610° | 89.436° | 89.497° | 89.557° | 89.514° | 89.522° |
| b | 90.051° | 89.818° | 89.957° | 89.864° | 89.770° | 89.892° |
| c | 92.359° | 92.495° | 92.512° | 92.557° | 92.502° | 92.485° |
| Angle | 1 | 2 | 3 | 4 | 5 | Mean |
|---|---|---|---|---|---|---|
| a | 89.544° | 89.498° | 89.356° | 89.481° | 89.397° | 89.449° |
| b | 90.012° | 90.189° | 90.204° | 90.170° | 90.193° | 90.154° |
| c | 92.605° | 92.740° | 92.697° | 92.784° | 92.773° | 92.720° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Z.; Ding, C.; Li, L.; Tian, B. The Design of Decoupled Robotic Arm Based on Chain Transmission. Machines 2024, 12, 410. https://doi.org/10.3390/machines12060410
Ma Z, Ding C, Li L, Tian B. The Design of Decoupled Robotic Arm Based on Chain Transmission. Machines. 2024; 12(6):410. https://doi.org/10.3390/machines12060410
Chicago/Turabian StyleMa, Ziling, Chuan Ding, Lijian Li, and Baoqiang Tian. 2024. "The Design of Decoupled Robotic Arm Based on Chain Transmission" Machines 12, no. 6: 410. https://doi.org/10.3390/machines12060410