
The Optimization and Control of the Engagement Pressure for a Helicopter Dry Clutch

Abstract
1. Introduction
2. Dynamic Model and Optimized Control Method
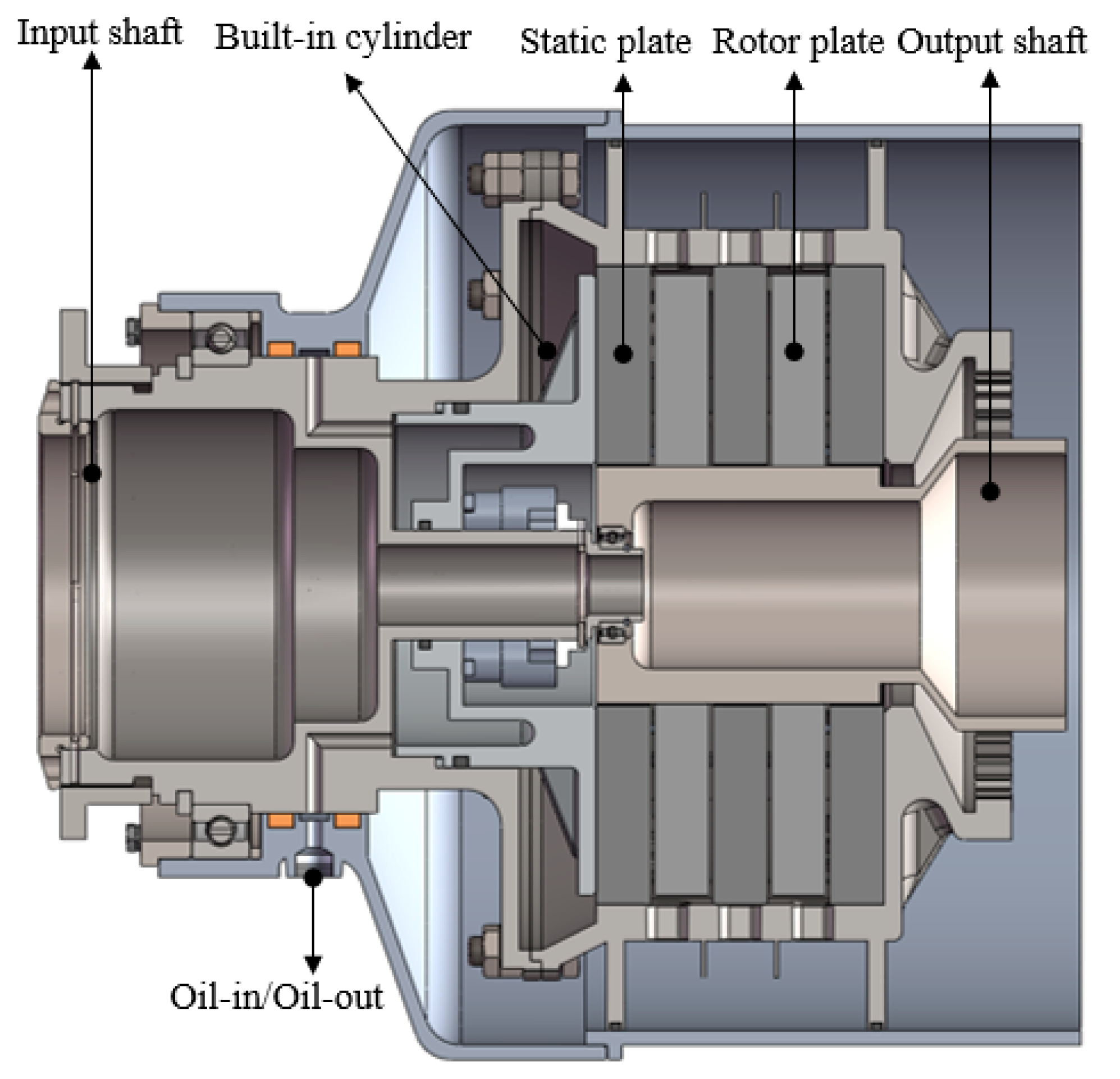
2.1. Nonlinear Input–Output Dynamic Modeling for a Helicopter Dry Clutch
2.2. Performance Evaluation Indicators of Clutch Engagement
2.2.1. Friction Work
2.2.2. Jerk
2.3. Optimal Pressure Curve Solving for Nonlinear System Based on LQR
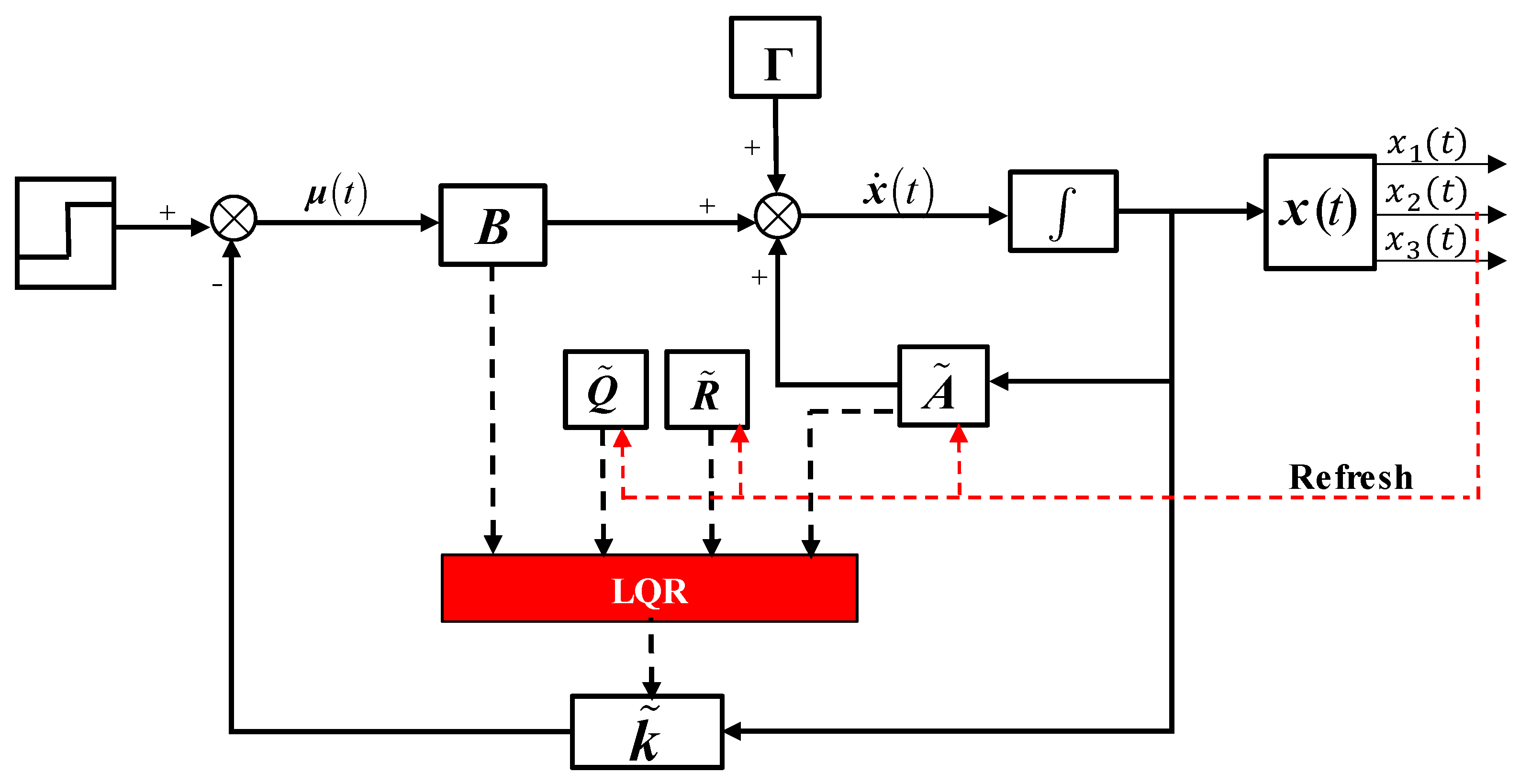
2.3.1. Constructing an LQR Solver Based on a Nonlinear Dynamic Model
2.3.2. Optimal Pressure Curve Solution
3. Simulation Results and Analysis
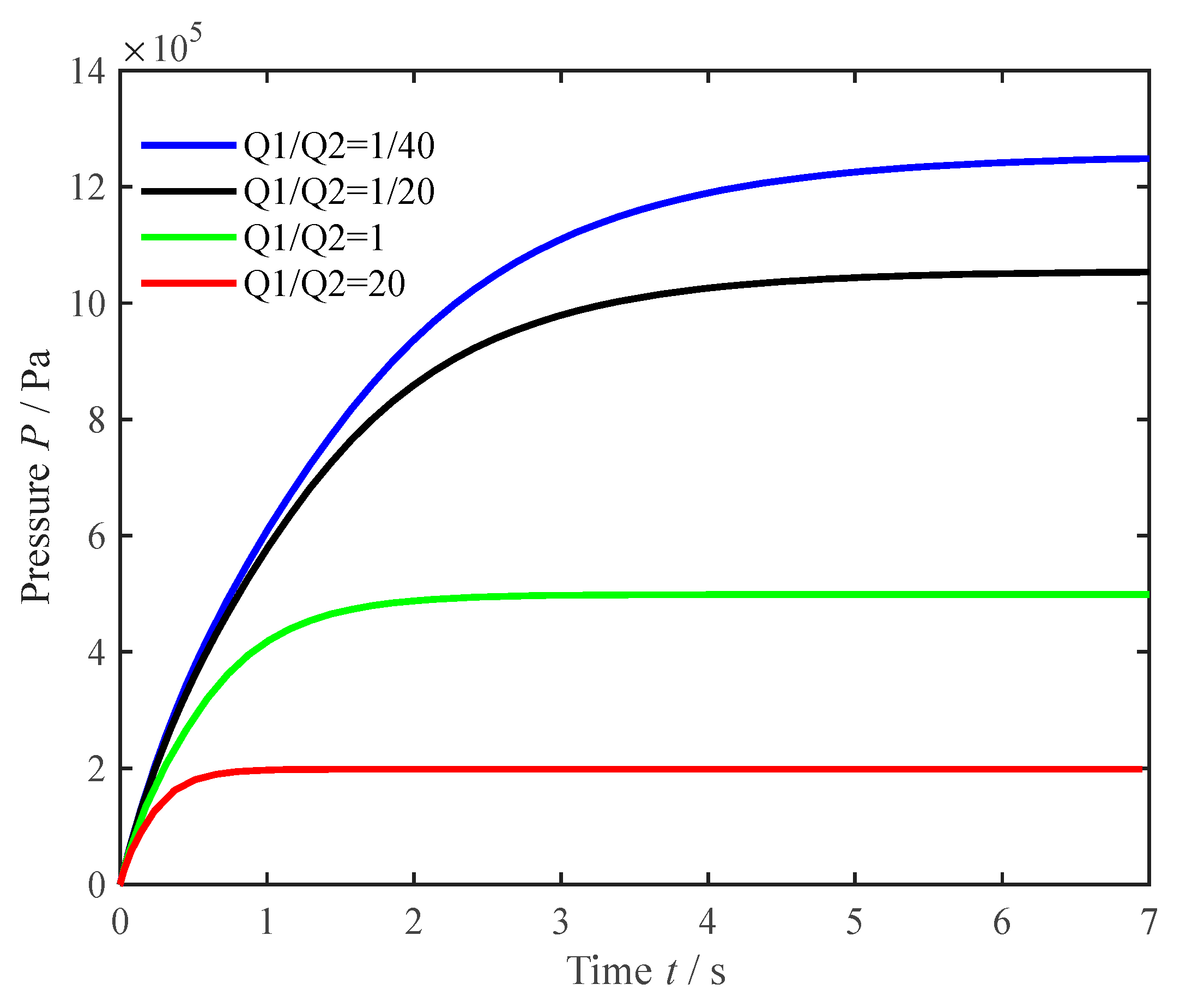
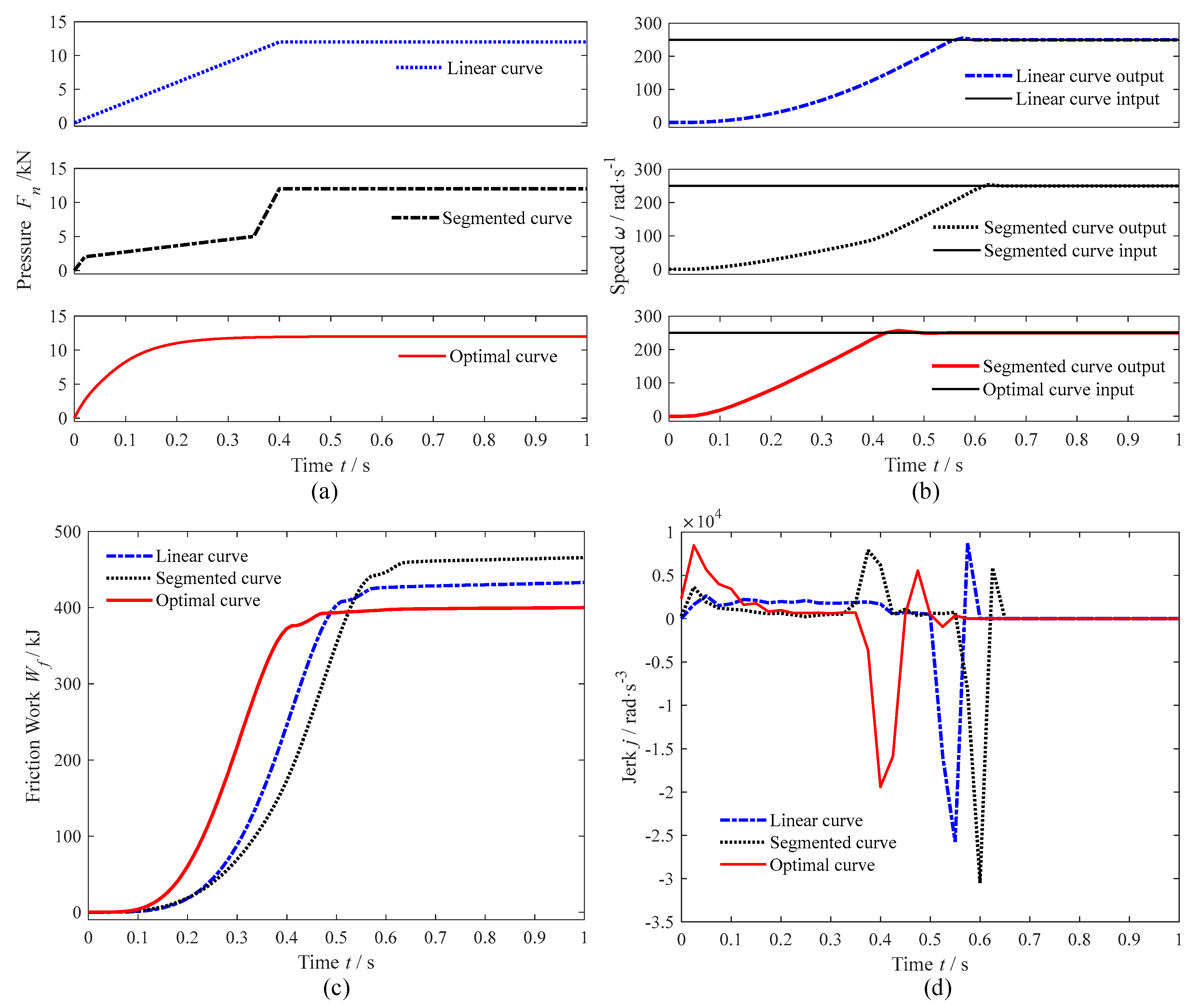
3.1. Comparative Analysis for the Optimal Pressure Curve
3.2. Simulation Result Analysis
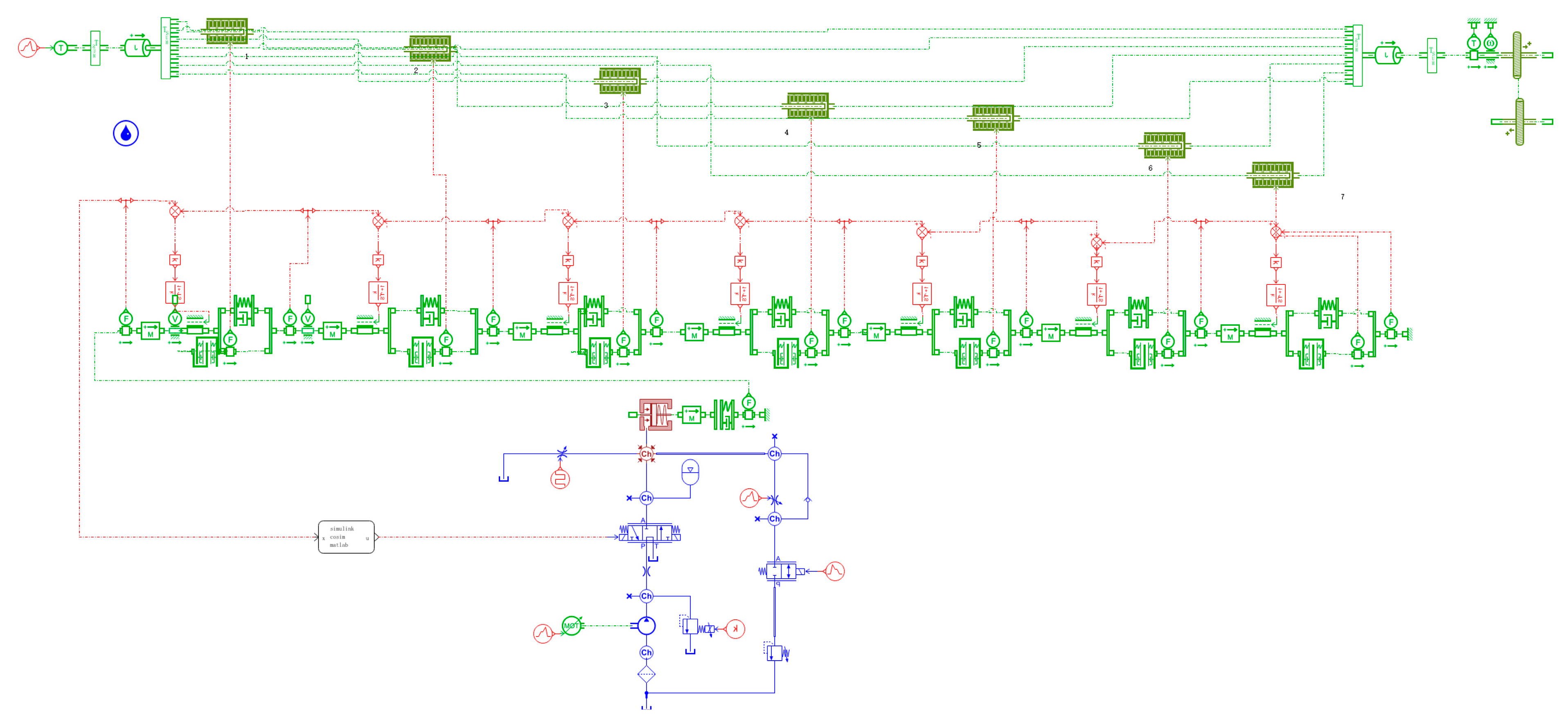
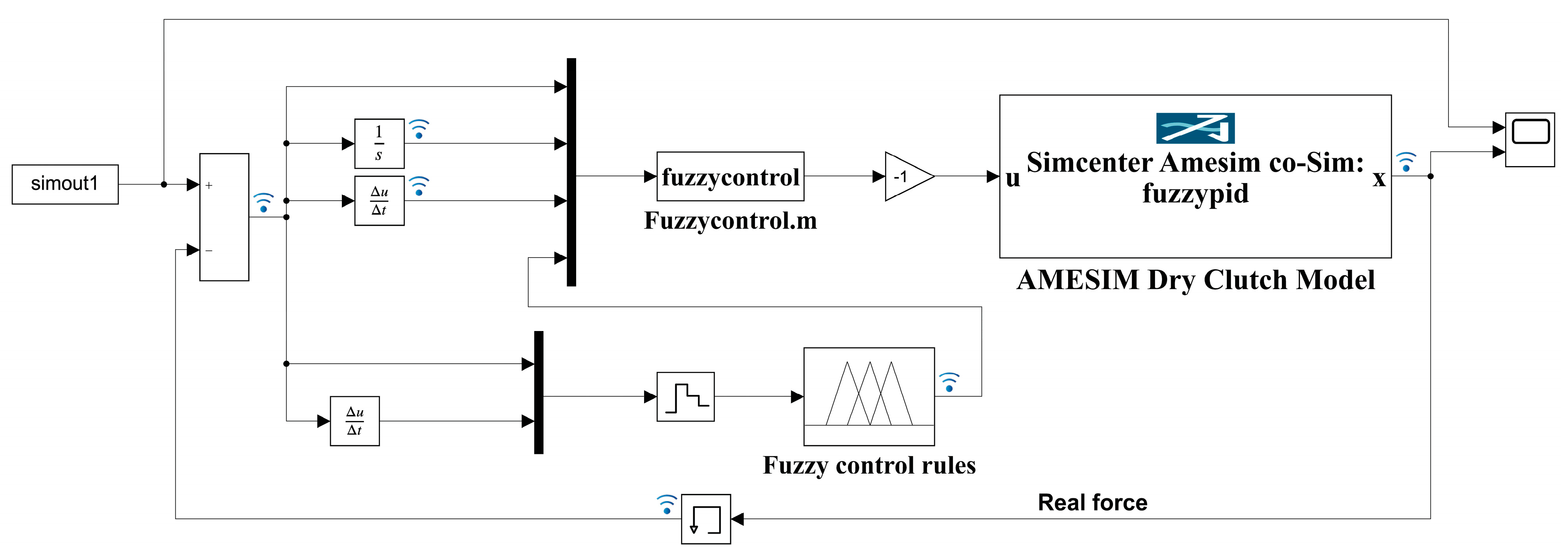
3.2.1. Simulation Model
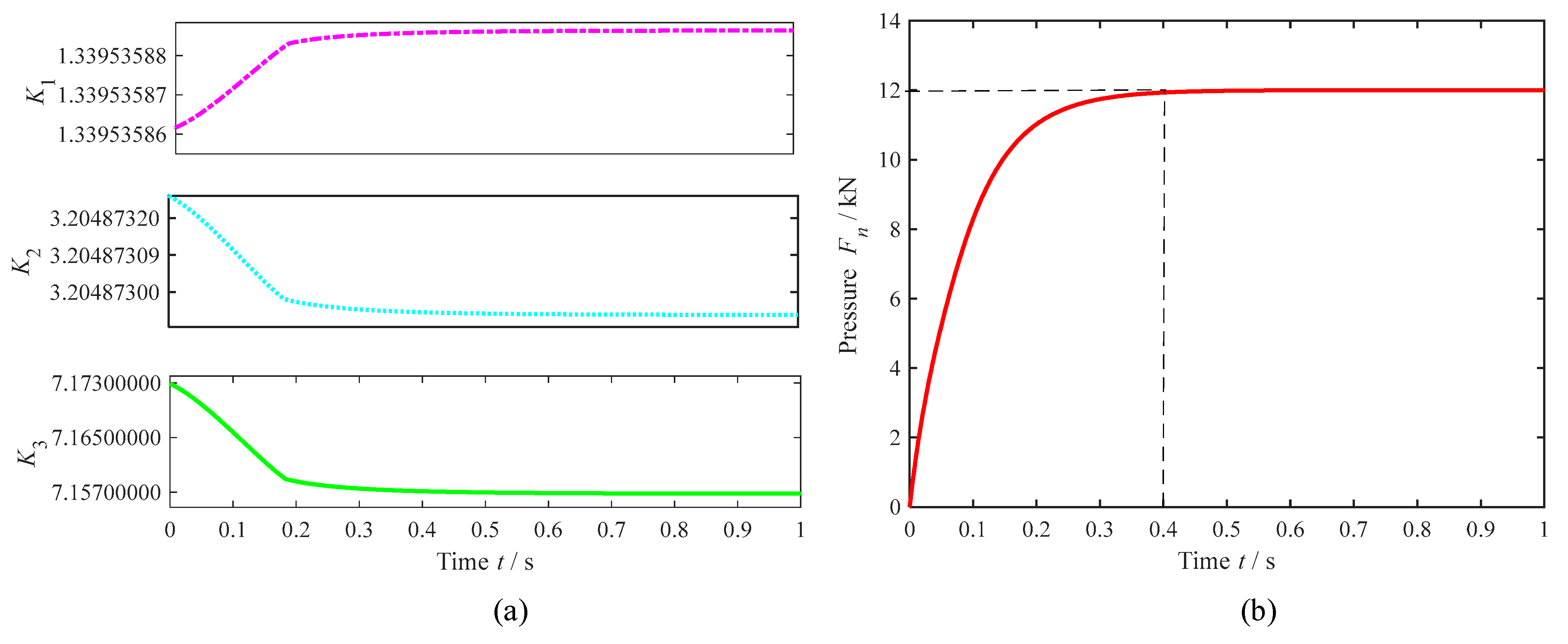
3.2.2. Analysis of Optimizing Curve Tracking Effect
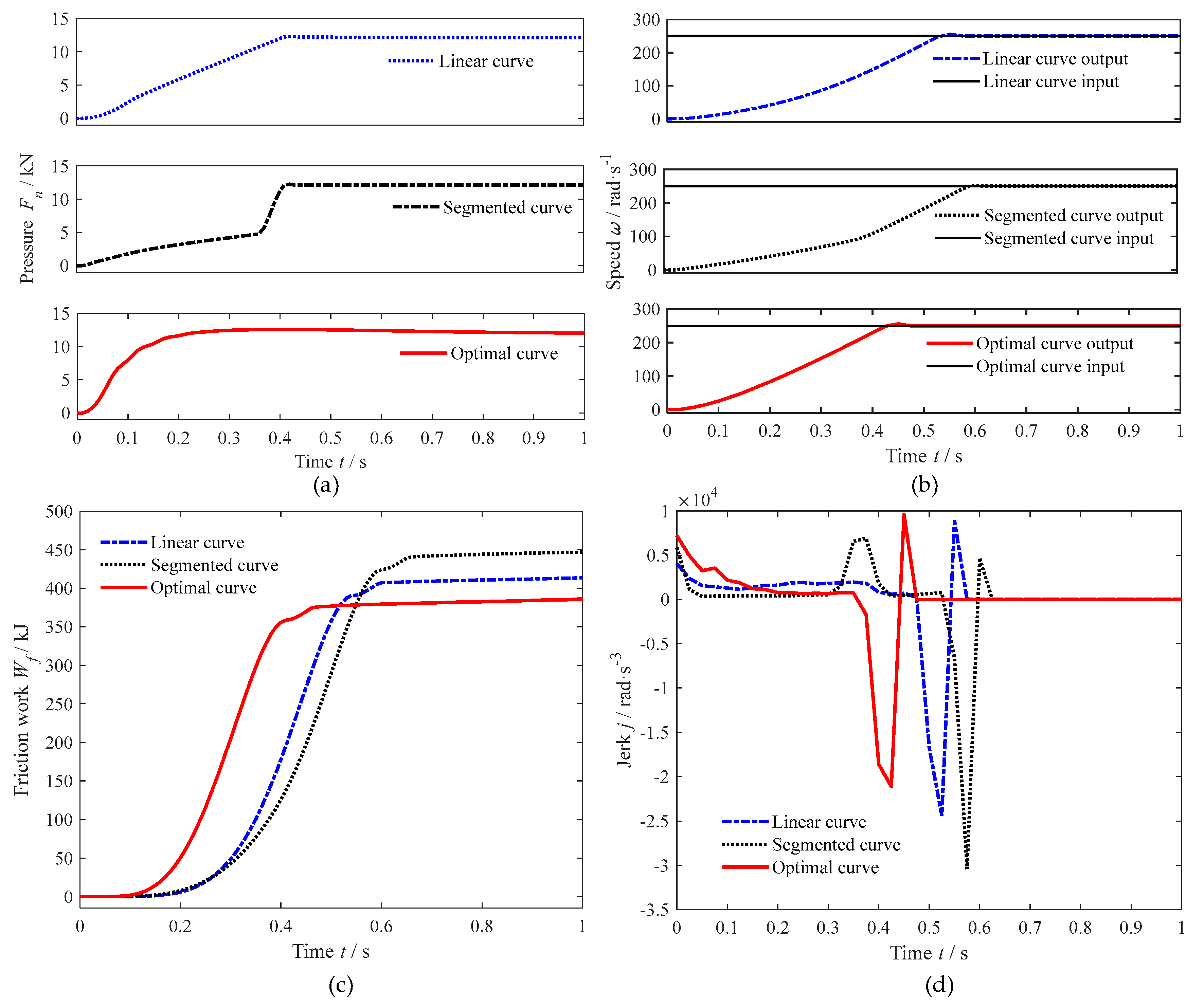
3.2.3. Comparative Analysis for Simulation Optimal Curve
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Qiu, Y.Q.; Li, Y.; Lang, J.X.; Wang, Z. Dynamics analysis and control of coaxial high-speed helicopter in transition flight. Aerosp. Sci. Technol. 2023, 137, 108278. [Google Scholar] [CrossRef]
- Vu, T.M.; Moezzi, R.; Cyrus, J.; Hlava, J.; Petru, M. Automatic clutch engagement control for parallel hybrid electric vehicle. Energies 2021, 14, 7256. [Google Scholar] [CrossRef]
- Gao, Q.; Liu, H.Y.; Niu, M.Y. Characteristics analysis and nonlinear control of a digital hydraulic pressure tracking system for high-speed helicopter wet friction clutch. Trans. Can. Soc. Mech. Eng. 2024, e-First. [Google Scholar] [CrossRef]
- Tan, W.Z.; Chen, Z.; Li, Z.Z.; Yan, H.Z. Thermal-Fluid-Solid Coupling Simulation and Oil Groove Structure Optimization of Wet Friction Clutch for High-Speed Helicopter. Machines 2023, 11, 296. [Google Scholar] [CrossRef]
- Van Der Heijden, A.C.; Serrarens, A.F.A.; Camlibel, M.K.; Nijmeijer, H. Hybrid optimal control of dry clutch engagement. Int. J. Control 2007, 80, 1717–1728. [Google Scholar] [CrossRef]
- Jin, T.T.; Li, P.K.; Zhu, G.Z. Optimal decoupled control for dry clutch engagement. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013. [Google Scholar]
- Van Berkel, K.; Hofman, T.; Serrarens, A.; Steinbuch, M. Fast and smooth clutch engagement control for dual-clutch transmissions. Control Eng. Pract. 2014, 22, 57–68. [Google Scholar] [CrossRef]
- Li, L.; Zhu, Z.B.; Chen, Y.; He, K.; Li, X.; Wang, X.Y. Engagement control of automated clutch for vehicle launching considering the instantaneous changes of driver’s intention. J. Dyn. Syst. Meas. Control 2017, 139, 021011. [Google Scholar] [CrossRef]
- Zhu, C.; Chen, Z.; Shi, Z.C.; Zhang, Y.D. Study on the Engagement Characteristics and Control Strategy of High Speed Difference Dry Friction Clutch. Machines 2023, 11, 407. [Google Scholar] [CrossRef]
- Park, J.; Choi, S.; Oh, J.; Eo, J. Adaptive torque tracking control during slip engagement of a dry clutch in vehicle powertrain. Mech. Mach. Theory 2019, 134, 249–266. [Google Scholar] [CrossRef]
- Mesmer, F.; Szabo, T.; Graichen, K. Feedforward control of a hydraulic clutch actuation path. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019. [Google Scholar]
- Bao, H.Y.; Xu, T.J.; Jin, G.H.; Huang, W. Analysis of dynamic engaged characteristics of wet clutch in variable speed transmission of a helicopter. Processes 2020, 11, 1474. [Google Scholar] [CrossRef]
- Ompusunggu, A.P.; Sas, P.; Van Brussel, H. Modeling and simulation of the engagement dynamics of a wet friction clutch system subjected to degradation. An application to condition monitoring and prognostics. Mechatronics 2013, 23, 700–712. [Google Scholar] [CrossRef]
- Li, A.; Qin, D. Adaptive model predictive control of dual clutch transmission shift based on dynamic friction coefficient estimation. Mech. Mach. Theory 2022, 173, 104804. [Google Scholar] [CrossRef]
- Zhao, Z.G.; Lei, D.; Chen, J.Y.; Li, H.Y. Optimal control of mode transition for four-wheel-drive hybrid electric vehicle with dry dual-clutch transmission. Mech. Syst. Signal Process 2018, 105, 68–89. [Google Scholar] [CrossRef]
- Mohsen Khosravi, H.; Azarinfar, K.S. Design of infinite horizon LQR controller for discrete delay systems in satellite orbit control: A predictive controller and reduction method approach. Heliyon 2024, 10, 24265. [Google Scholar] [CrossRef] [PubMed]
- Zhou, S.; Wu, J.; Zhang, Y. Optimal Shift Control of Dual Clutch Transmission in Electric Vehicles Based on Linear Quadratic Regulator. SAE Int. J. Adv. Curr. Pract. Mobil. 2023, 6, 418–428. [Google Scholar]
- Wang, Y.; Shi, H.; Rong, X.; Jiang, D. Adaptive Pressure Control of the Clutch Hydraulic Actuator in Wet Dual Clutch Transmission based on TS Fuzzy Model and Extended State Observer. IEEE Access 2023, 1, 129090–129099. [Google Scholar] [CrossRef]
- Mallette, G.; Gauthier, C.E.; Hemmatian, M.; Denis, J.; Plante, J.-S. Design and Experimental Assessment of a Vibration Control System Driven by Low Inertia Hydrostatic Magnetorheological Actuators for Heavy Equipment. Actuators 2023, 12, 407. [Google Scholar] [CrossRef]
- Jin, X.; Chen, K.K.; Zhao, Y.; Ji, J.T.; Jing, P. Simulation of hydraulic transplanting robot control system based on fuzzy PID controller. Measurement 2020, 164, 108023. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Symbol | Value |
|---|---|---|
| Input torque | Ti | 955 |
| Load torque | Tu | 100 |
| Input equivalent moment of inertia | Ii | 2 |
| Output equivalent moment of inertia | Iu | 1 |
| Input equivalent damping coefficient | bi | |
| Output equivalent damping coefficient | bv | |
| Coulomb friction coefficient | 0.08 | |
| Static friction coefficient | 0.12 | |
| Empirical constants of the friction model | 7.64065 | |
| Empirical exponential constant of the friction model | ||
| Rotor plate outer diameter/m | r1 | 0.1 |
| Rotor plate inner diameter/m | r2 | 0.05 |
| Torque transmission efficiency | 0.85 | |
| Number of clutch contact surfaces | 4 |
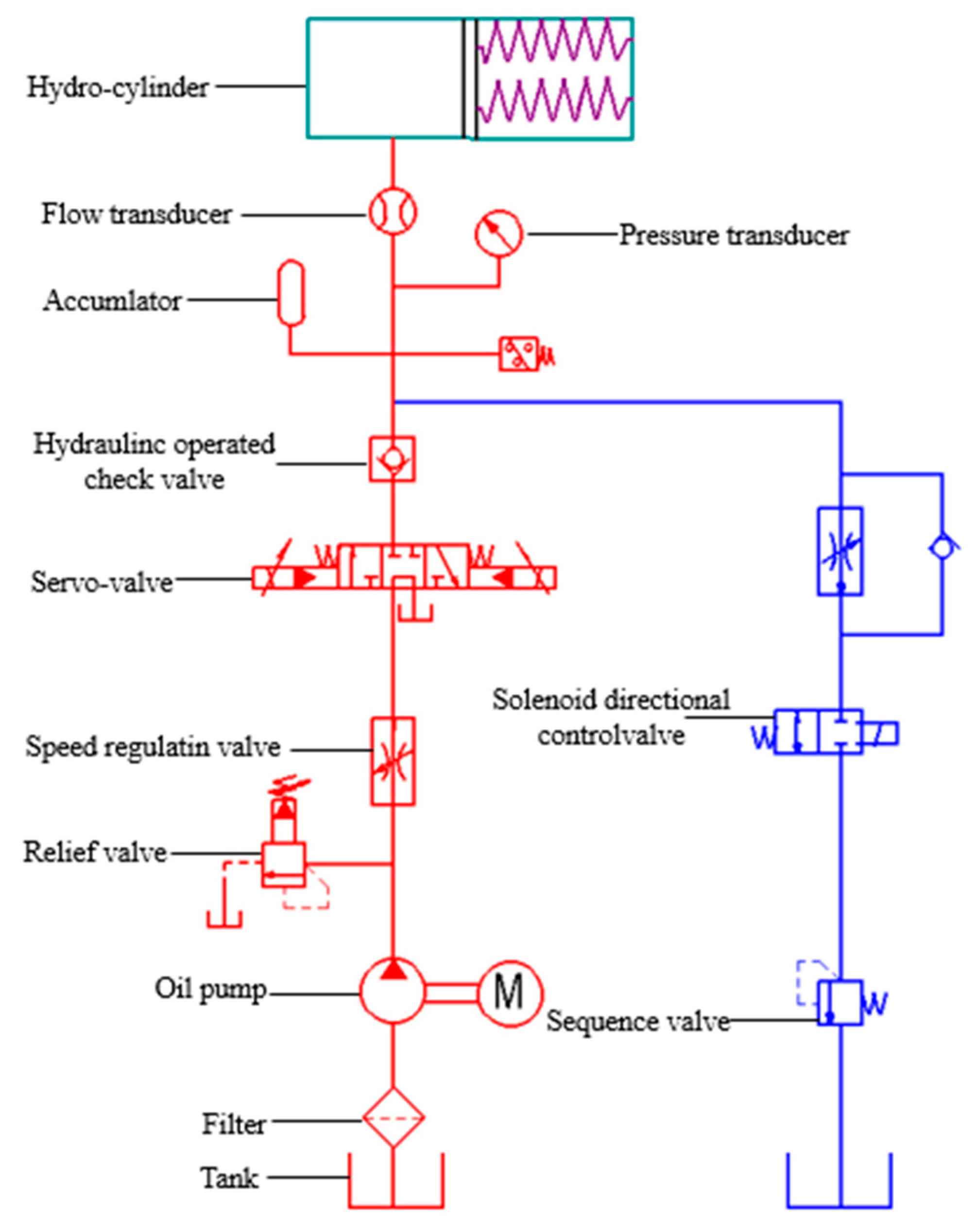
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Hydraulic cylinder outer diameter/mm | 200 | Maximum system pressure/MPa | 3 |
| Hydraulic cylinder inner diameter/mm | 30 | Maximum system flow rate | 2.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, Y.; Li, Q.; Liu, H. The Optimization and Control of the Engagement Pressure for a Helicopter Dry Clutch. Machines 2024, 12, 533. https://doi.org/10.3390/machines12080533
Xiao Y, Li Q, Liu H. The Optimization and Control of the Engagement Pressure for a Helicopter Dry Clutch. Machines. 2024; 12(8):533. https://doi.org/10.3390/machines12080533
Chicago/Turabian StyleXiao, Yangyang, Qunming Li, and Huisi Liu. 2024. "The Optimization and Control of the Engagement Pressure for a Helicopter Dry Clutch" Machines 12, no. 8: 533. https://doi.org/10.3390/machines12080533
APA StyleXiao, Y., Li, Q., & Liu, H. (2024). The Optimization and Control of the Engagement Pressure for a Helicopter Dry Clutch. Machines, 12(8), 533. https://doi.org/10.3390/machines12080533