Abstract
In recent years, the increasing construction of high-rise buildings has led to the widespread use of glass curtain walls. Regular cleaning is essential to maintain their aesthetic appeal and functionality. However, manual cleaning methods pose significant safety risks, necessitating the development of façade-cleaning robots. This paper presents a 3-Degree-of-Freedom Modular High-Rise Façade-Cleaning Robot (3-DOF-MHRFCR), consisting of a lifting module, an XYZ motion module, and a cleaning module. The robot employs a synchronous belt lifting mechanism for vertical movement, ensuring high positioning accuracy and safety. The XYZ motion module enables precise cleaning and obstacle traversal, while the cleaning module combines high-pressure water jets, rotating brushes, and squeegees for effective contaminant removal. Experimental results demonstrate a maximum glass transmittance enhancement of 72.4% and a 21.8% reduction in water consumption compared to manual cleaning, validating the robot’s efficiency and stability.
1. Introduction
In recent years, the advancement of architectural technologies has led to a surge in the construction of high-rise urban buildings. Glass façades, as iconic elements of modern architecture, have become the preferred material for vertical building envelopes due to their transparency, aesthetic appeal, and ability to enhance natural lighting while reducing energy consumption [1]. However, prolonged exposure to weathering, dust, and pollution diminishes the visual and functional integrity of glass façades, necessitating regular cleaning. The predominant method for façade maintenance involves manual labor using ropes or gondolas, which poses significant safety risks to workers [2]. To mitigate these hazards, more and more people are beginning to study façade-cleaning robots.
The façade-cleaning robot is essentially a combination of a climbing robot and a cleaning module. By integrating climbing robots with different end-effectors, various high-altitude tasks can be accomplished, including inspection, spraying, and cleaning. However, climbing robots are rarely deployed in real-world applications, as enabling robots to move safely and efficiently on high-rise building surfaces remains challenging. Climbing robots are typically classified based on two aspects: their locomotion methods and adhesion mechanisms. Locomotion methods include legged, wheeled, tracked [3], rotor-winged [4], and tethered systems [5]. Adhesion mechanisms encompass vacuum adsorption [6], magnetic adhesion, thrust-based adhesion, electrostatic adhesion, and bio-inspired adhesion. Any climbing robot invariably combines a specific locomotion method with a particular adhesion mechanism.
Legged climbing robots employ bio-inspired designs, mimicking bipedal or multi-legged spider-like structures to achieve locomotion on vertical surfaces [7]. These robots are typically combined with vacuum or bio-inspired adhesion mechanisms, executing climbing motions by sequentially attaching and releasing suction cups in coordination with leg movements [8]. Such robots are suitable for smooth glass surfaces, capable of adapting to wall obstacles with outstanding obstacle-crossing capability, though their movement speed remains low. In contrast, wheeled and tracked climbing robots enable continuous motion on high-rise building surfaces with higher mobility speeds. Wheels and tracks can be integrated with vacuum adsorption [9,10] or magnetic adhesion to facilitate vertical wall traversal. However, magnetic adhesion is restricted to ferromagnetic surfaces. For buildings with non-ferromagnetic materials (e.g., concrete/cement, wood, glass, and aluminum), vacuum adsorption is considered the most convenient solution. Wheeled systems excel in speed on flat surfaces but exhibit weak obstacle-crossing performance, while tracked systems enhance obstacle-crossing capability at the expense of poorer steering flexibility.
Tethered parallel façade-cleaning robots adopt a tethered locomotion method [11,12,13], which can be categorized into one-dimensional, planar two-dimensional, and spatial three-dimensional motion based on their degrees of freedom. One-dimensional tethered robots move solely along the vertical axis of high-rise buildings. They utilize a top-mounted winch to extend and retract ropes, enabling vertical ascent and descent along the façade while maintaining a fixed distance from the wall surface. These robots require no obstacle-crossing functionality or motion perpendicular to the building surface. They employ non-contact cleaning, resulting in relatively limited cleaning effectiveness. Planar two-dimensional tethered robots introduce an additional degree of freedom perpendicular to the wall surface, allowing them to maintain close proximity to the façade during cleaning. These systems typically integrate thrust-based adhesion or vacuum adsorption. Thrust-based adhesion employs vortex fans or rotors [14], where generated thrust presses the robot against the wall during cleaning. When encountering obstacles, reversing the fan direction creates repulsive thrust to detach and traverse obstacles. While such thrust-driven tethered robots achieve stable adhesion and efficient cleaning on complex surfaces, continuous fan operation consumes significant energy and generates notable noise. In contrast, vacuum adsorption offers a simpler and more energy-efficient solution, requiring only compressed gas to power vacuum generators for sufficient suction. These robots maintain at least one set of suction cups attached to the surface during movement, with synchronized rope tensioning assisting locomotion [15]. Spatial three-dimensional tethered robots incorporate lateral motion capabilities across the building façade. Typically, winches installed at the four corners of the structure coordinate multiple ropes to enable full-surface coverage [16,17]. Such systems often utilize thrust-based adhesion for obstacle avoidance [18]. However, multi-rope control presents challenges, particularly for large-span movements, where elastic deformation of ropes compromises precise positioning accuracy.
For large-scale structures with vertical surfaces such as buildings, executing cleaning tasks demands efficient, stable locomotion methods and strong environmental adaptability. Therefore, climbing robots employing a two-dimensional tethered system present an optimal choice due to their high stability, simple yet effective locomotion, and robust adaptability to vertical surfaces. The robot proposed in this study utilizes vacuum adhesion, combining tethering with vacuum suction cups to achieve enhanced stability. Traditional two-dimensional tethered robots enable large-scale vertical movement but lack lateral motion capability, resulting in narrow cleaning coverage during each top-to-bottom cycle. To expand the cleaning range, this work incorporates a three-degree-of-freedom (3-DoF) XYZ motion module, which introduces lateral mobility, allowing broader coverage during a single vertical cleaning pass. The XYZ module also provides motion perpendicular to the wall surface, enabling the cleaning unit to maintain close contact during operation and detach for obstacle crossing. This integration endows the robot with simultaneous obstacle-crossing and large-scale cleaning capabilities. Skyline Ozmo offers a comparable solution [19], with key differences summarized in Table 1. It employs a tethered pod for vertical movement and integrates a robotic arm capable of lateral motion within the pod to extend cleaning coverage. However, it lacks adhesion mechanisms, relying instead on obstacle-crossing wheels beneath the pod, which induces noticeable swaying during arm operation. In contrast, our design incorporates four retractable vacuum suction cups on the lifting platform. During cleaning, these cups adhere to the wall surface, minimizing vibrations and ensuring superior stability. Skyline Ozmo suffers from high mass, complex robotic arm control, and elevated overall costs. The proposed robot adopts an aluminum alloy frame and a simplified 3-DoF XYZ motion module, achieving flexible mobility, easier control, and reduced costs.

Table 1.
Comparison of similar solutions.
Among locomotion mechanisms for façade cleaners, cable-driven systems are widely adopted for their stability. However, most existing cable-driven robots lack additional DOF in cleaning units, severely limiting wall adaptability. Existing façade-cleaning robots often face limitations such as poor adaptability to complex surfaces due to planar movement and the complexity of multi-rope control systems. To address these challenges, this study proposes a 3-DOF Modular High-Rise Façade-Cleaning Robot with an XYZ motion module, which enhances the robot’s adaptability to irregular façades and simplifies control. Additionally, the use of a synchronous belt lifting system reduces installation complexity and improves positioning accuracy, ensuring superior operational stability.
Compared to the four-cable parallel robot, the lifting platform proposed in this paper demonstrates lower installation complexity while achieving superior positioning accuracy and enhanced operational stability, and eliminates the complex mathematical modeling and control issues associated with multiple ropes. For façades with intricate window frames, the XYZ motion module enables agile traversal of ridges for thorough cleaning; on flat surfaces, it ensures rapid coverage and efficiency. The robot balances broad applicability with high performance, dynamically adjusting cleaning paths to environmental conditions. Moreover, the XYZ motion module permits localized repeated cleaning for stubborn stains.
To sum up, the robot in this article has the following characteristics: (1) Modular 3-DOF Architecture: A novel robot integrating a lifting module, XYZ motion module, and cleaning module enables adaptive motion and obstacle traversal. (2) XYZ Motion Module Advantages: Compared to traditional manipulators, this module achieves enhanced spatial adaptability, a lighter weight, and simplified control for efficient coverage of flat surfaces and agile traversal of window frame ridges. (3) Three-Stage Cleaning Process: Combines high-pressure water jets, rotating brushing, and squeegee wiping to remove contaminants effectively. Localized areas can be repeatedly cleaned to achieve a higher level of cleanliness, experimentally validated through systematic experiments.
This paper is organized as follows: Section 2 details the structural and control system design, emphasizing modular architecture and coordinated operation. Section 3 presents motion and obstacle-overcoming strategies. Section 4 describes indoor prototype testing, experimental validation, and performance analysis. Section 5 concludes the study.
2. System Configuration and Work Environment
2.1. Work Environment
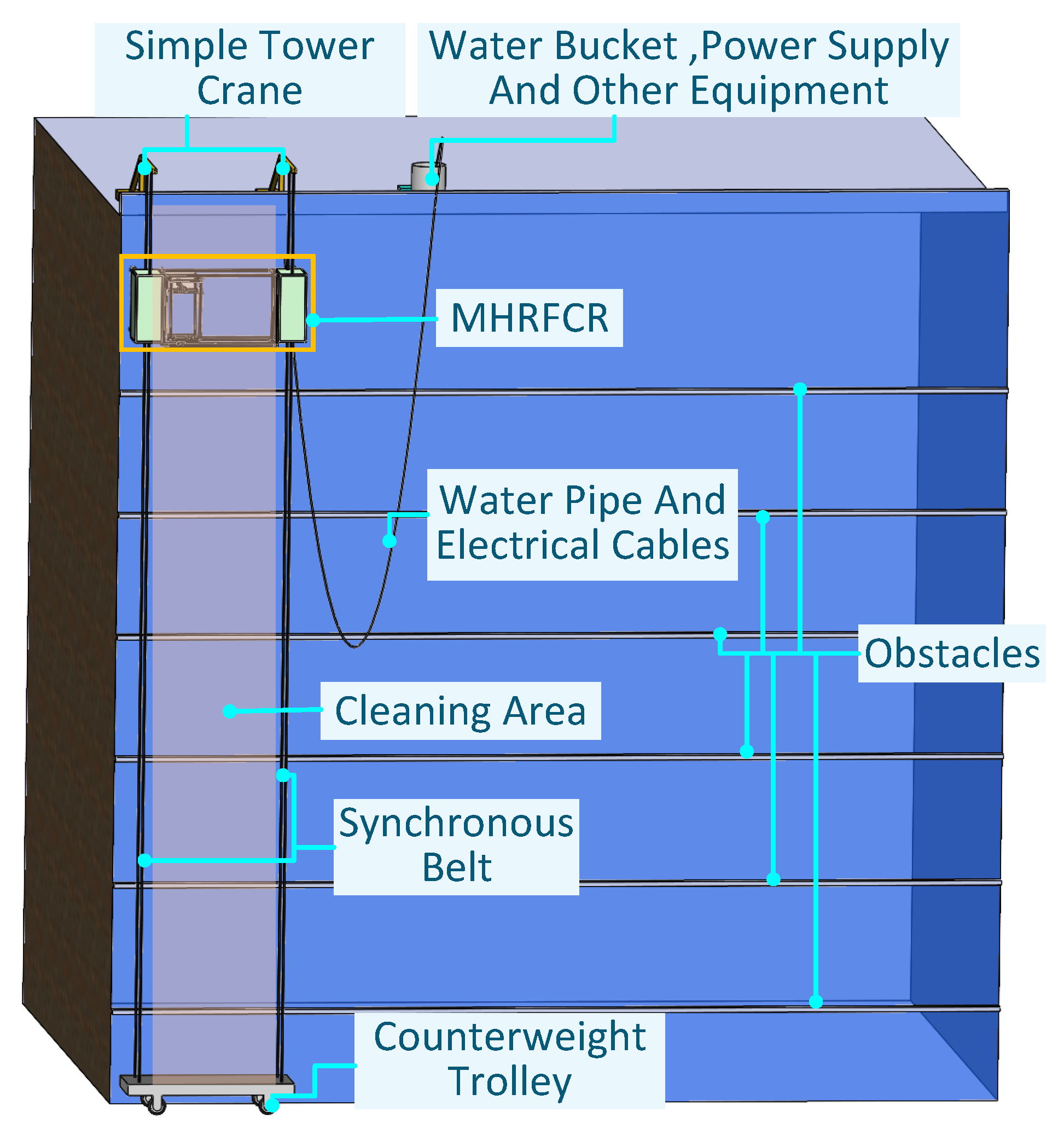
This system is designed for vertical building façade operations on structures, as shown in Figure 1.
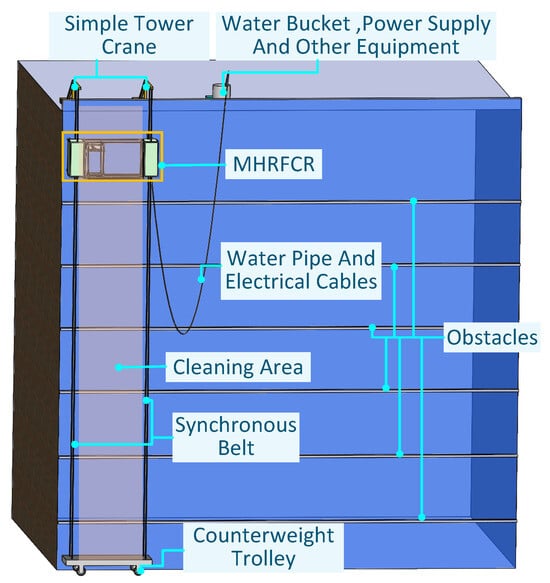
Figure 1.
Working environment.
The environmental requirements are as follows:
(1) Building height ≤ 100 m;
(2) Surface protrusions ≤ 120 mm;
(3) Rooftop needs to reserve an equipment deployment area of at least 3 m × 3 m.
The system consists of a simple rooftop crane, four high-strength synchronous belts, and a ground-moving counterweight trolley. The pre-tension of the synchronous belt is maintained in the range of 200–300 N, with compensation achieved through the tensioning device of the ground counterweight trolley. The dedicated rooftop cable system uses a waterproof power supply cable and a pressure-resistant water pipe (diameter 6 mm) in a combined cable, distributed along the façade surface.
2.2. Structural Design
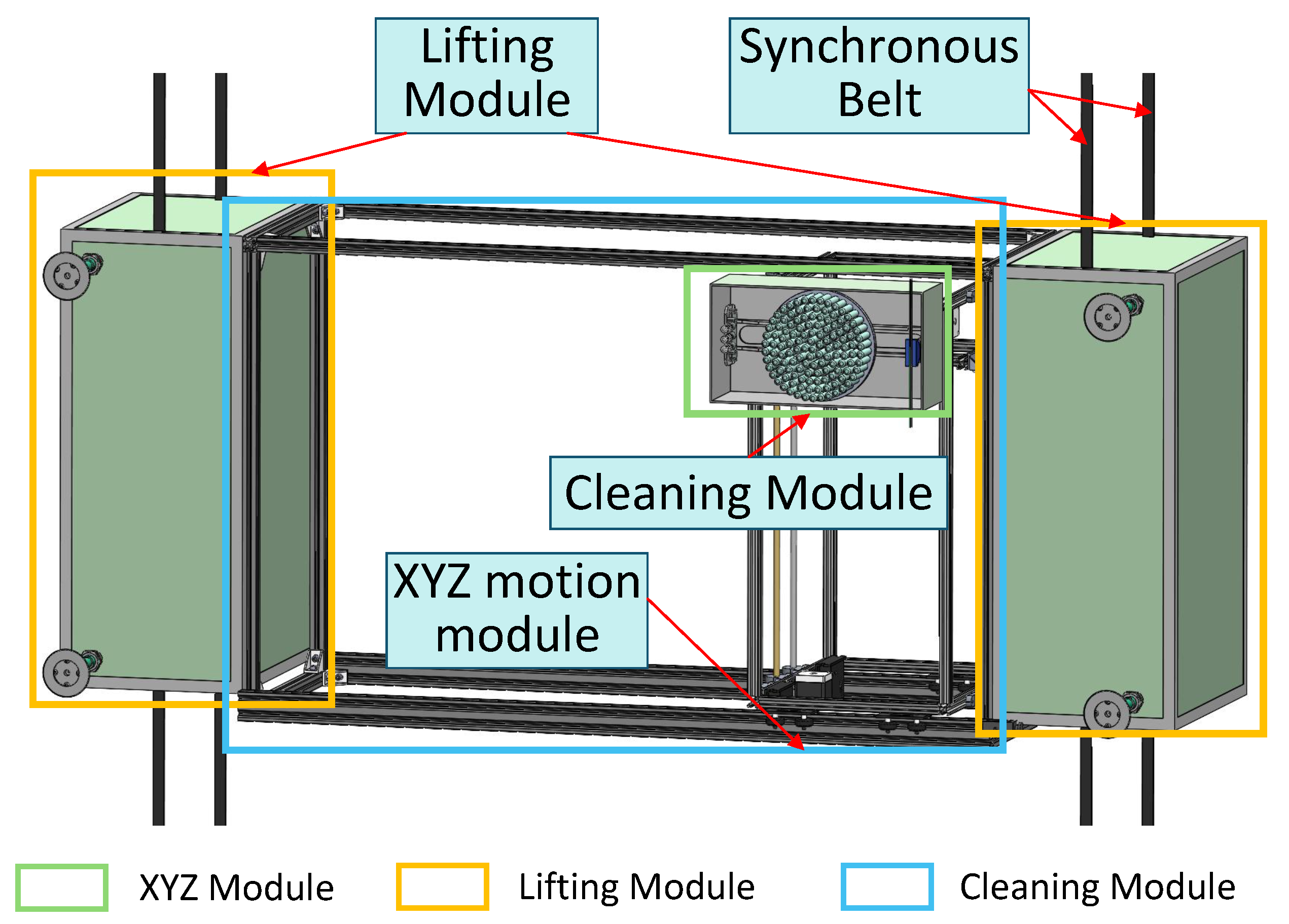
A modular high-rise façade-cleaning robotic system was designed for buildings, as shown in Figure 2. The entire system adopts a modular architecture and lightweight design concept.
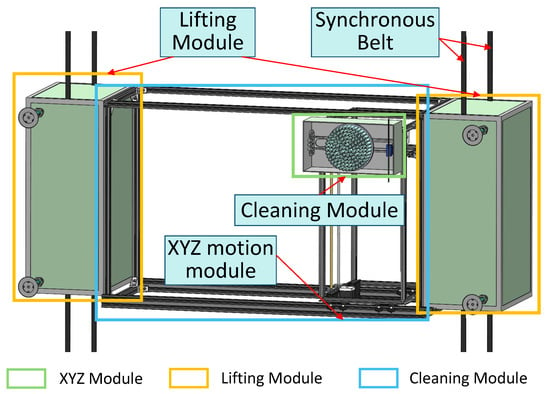
Figure 2.
Three-dimensional model of 3-DOF Modular High-Rise Façade-Cleaning Robot.
The robot mainly consists of three functional modules: the lifting module, the XYZ motion module, and the cleaning module. The lifting module is responsible for the robot’s vertical climbing and stable adhesion. The XYZ motion module enables the robot to move flexibly on the horizontal plane, ensuring that cleaning operations cover all areas and can overcome obstacles. The cleaning module handles the actual cleaning work, and users can adjust the cleaning intensity and method based on the material and contamination level of the façade.
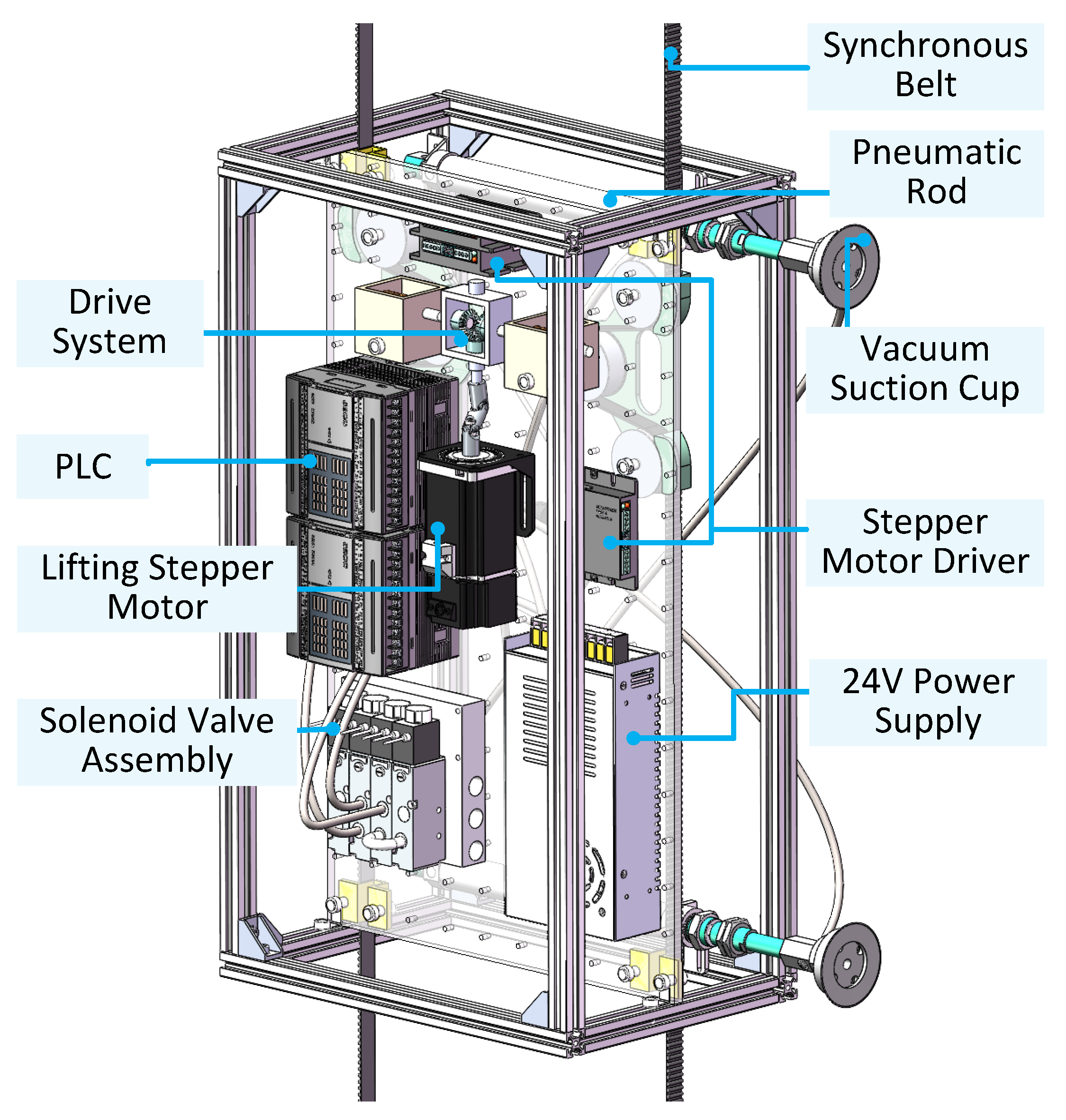
2.2.1. The Lifting Module
The lifting module, as shown in Figure 3, adopts a dual-drive master–slave structure design and integrates an electronic equipment compartment (including power management, main control unit, and sensor system), a worm gear self-locking mechanism (safety factor greater than or equal to 3), and a vacuum suction system.The pneumatic rod is controlled in binary mode, with only two states: fully extended and fully retracted. However, a spring buffer device is installed at the connection between the telescopic rod and the suction cup to adapt to protrusions or inclinations of the wall within 5 mm.
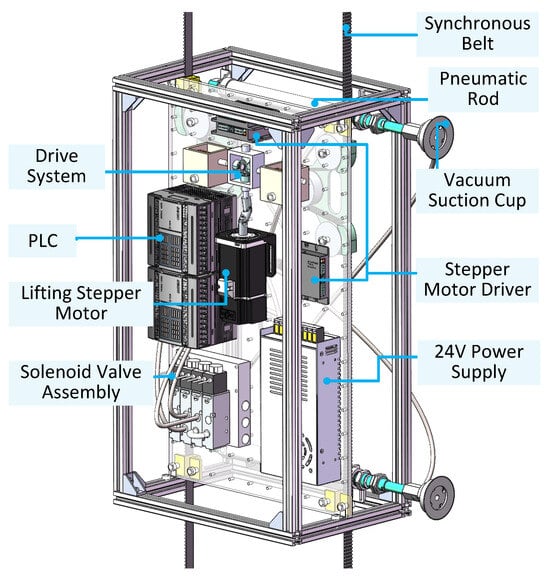
Figure 3.
Hardware configuration of the lifting module.
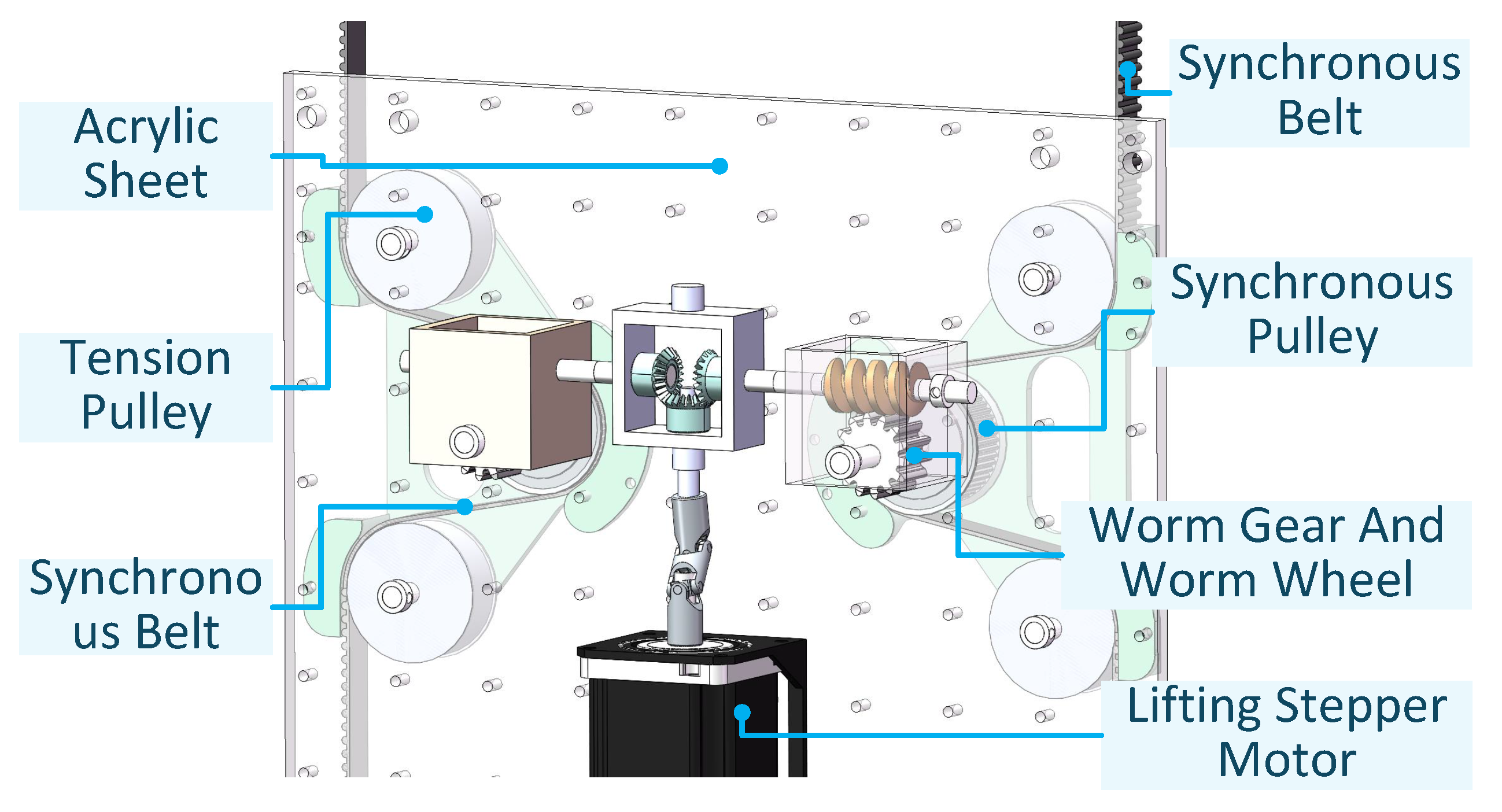
An innovative built-in synchronous belt climbing mechanism is adopted, replacing the traditional winch solution. Based on the excellent characteristics of synchronous belt drive with an efficiency ≥ 95% and elongation < 0.5%, a climbing system with a vertical motion accuracy of ±2 mm is constructed. The synchronous belt lifting mechanism is driven by a stepper motor, with each set configured with one driving wheel and two idle tensioning wheels, as shown in Figure 4.
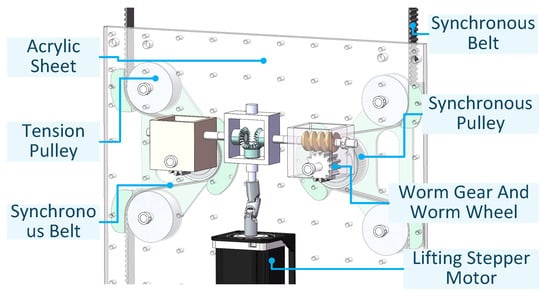
Figure 4.
Synchronous belt climbing mechanism.
Dual-motor synchronous control is achieved through an inclination sensor (platform tilt angle < 0.5°). The worm gear mechanism ensures that when the motor loses power, the synchronous belt pulley locks automatically, guaranteeing the safety and stability of the lifting process.
2.2.2. The XYZ Motion Module
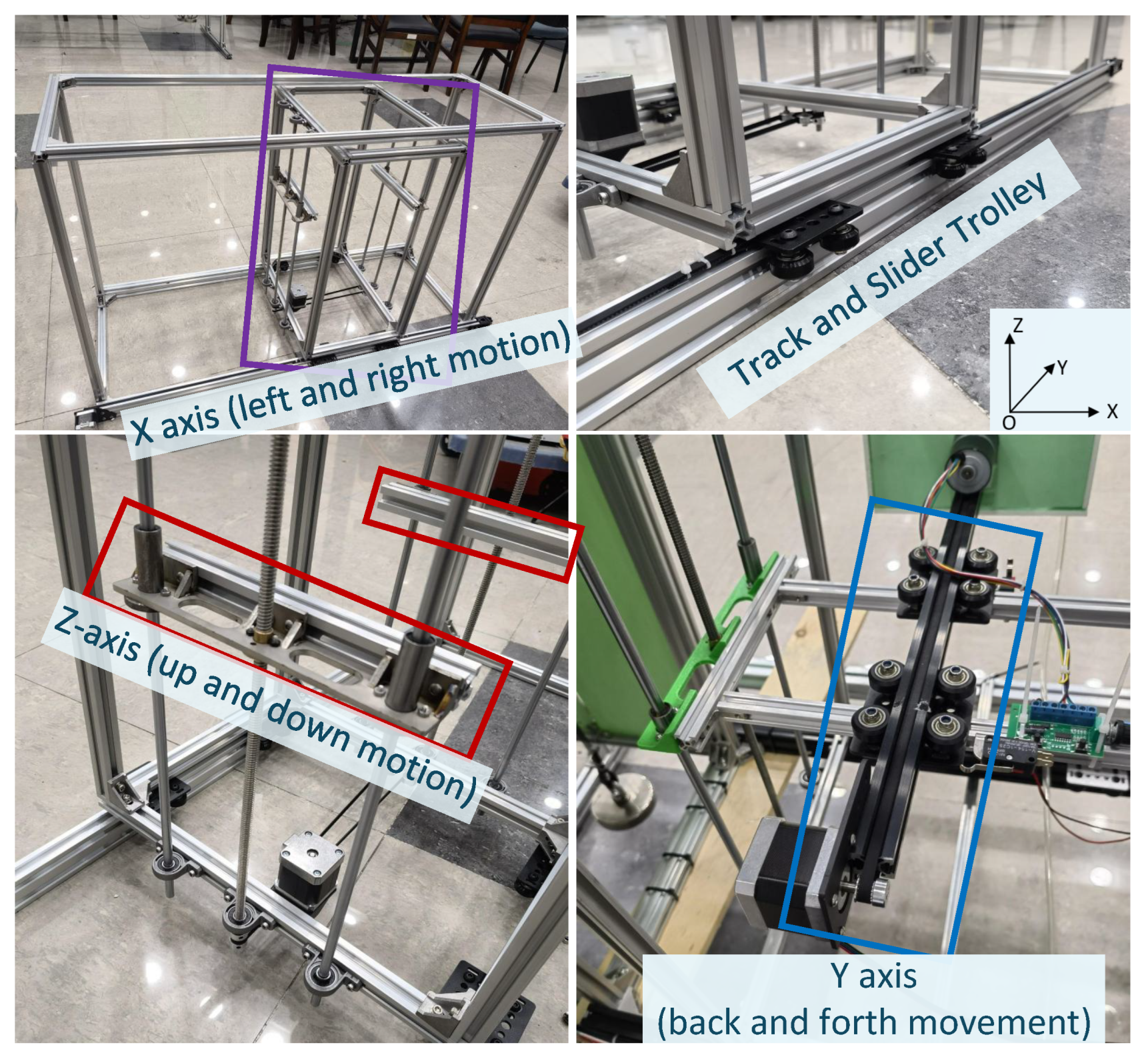
The XYZ motion module weighs only 10.5 kg, ensuring lightweight and efficient operation. The overall frame dimensions are 1000 mm × 400 mm × 600 mm, with a three-axis linkage design to achieve a 1000 mm × 600 mm working stroke. The X/Y axes use a synchronous belt drive (repeatability 0.5 mm), and the Z-axis adopts a lead screw drive. The three axes are driven by 3 stepper motors, forming an omnidirectional mobile platform in the Cartesian coordinate system, as shown in Figure 5. The XYZ motion module drives the cleaning module to achieve precise movement and helps the cleaning module overcome obstacles up to 120 mm in height.
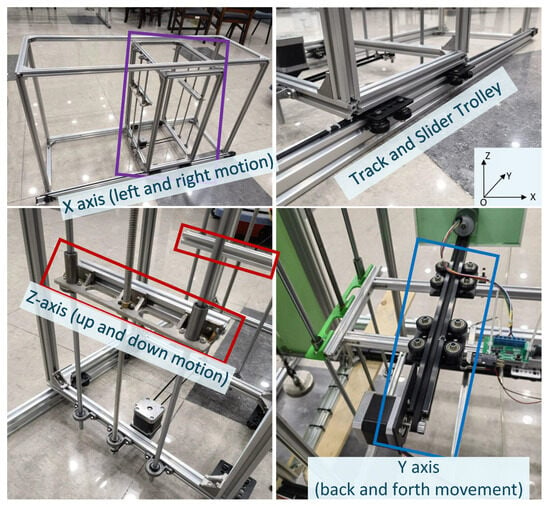
Figure 5.
The XYZ motion module.
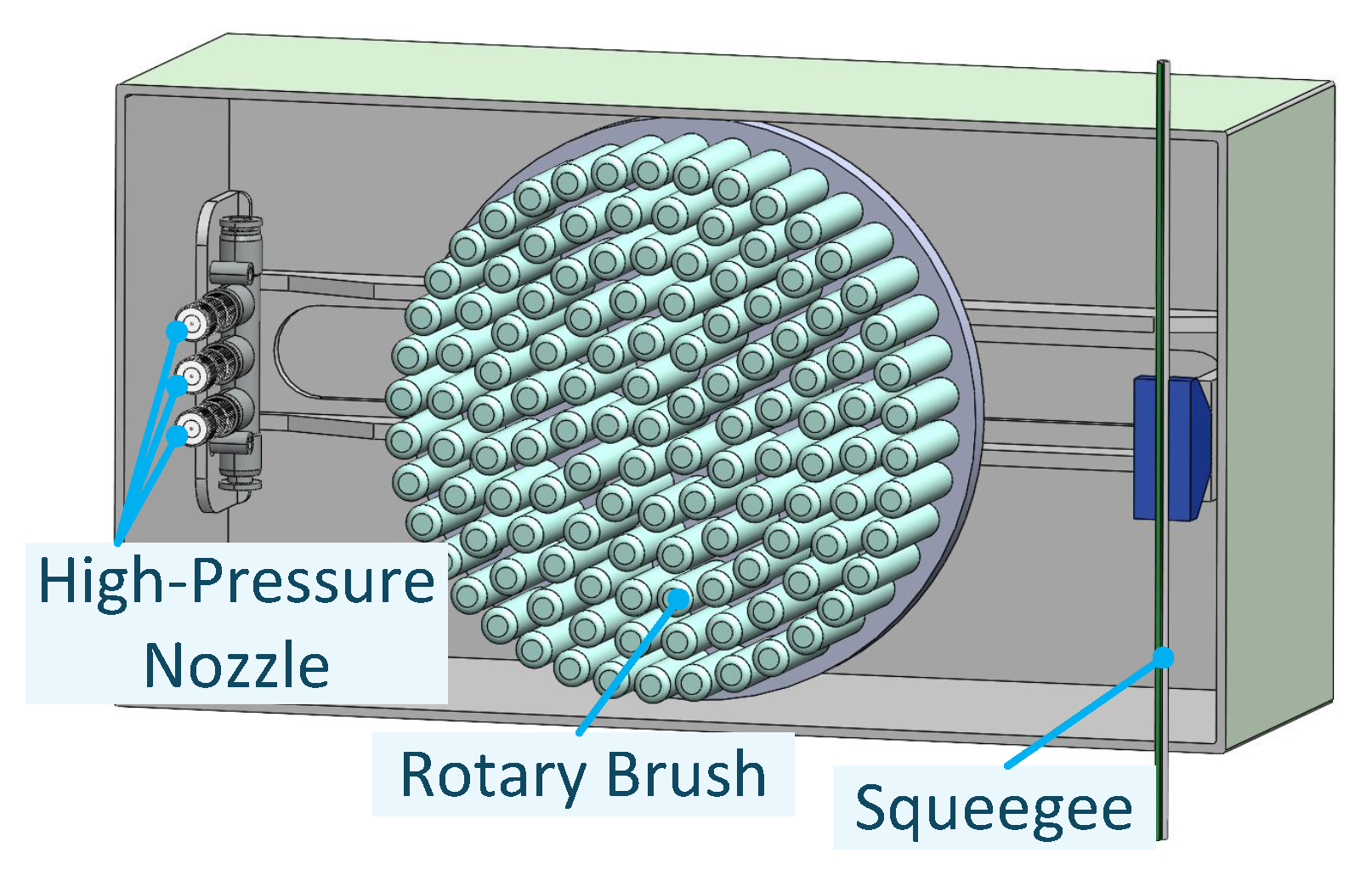
2.2.3. The Cleaning Module
As shown in Figure 6, an integrated multimodal cleaning system includes:
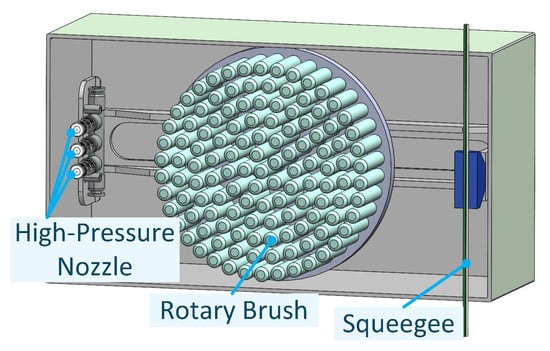
Figure 6.
The cleaning module.
(1) Three high-pressure water–air nozzles (adjustable from 0.5–1.2 MPa);
(2) A rotating brush system, with two specifications: ;
(3) A squeegee mechanism.
The cleaning module is designed with a quick-change interface, enabling the module to be switched in under 2 min to adapt to different operating conditions of various flat façades. For large, flat wall surfaces, a larger cleaning module is used to improve cleaning efficiency. For window sills or areas with more edges, a smaller cleaning module can be replaced. This not only enables better obstacle overcoming but also facilitates cleaning the corners and edges of window sills.
2.3. Control System Design
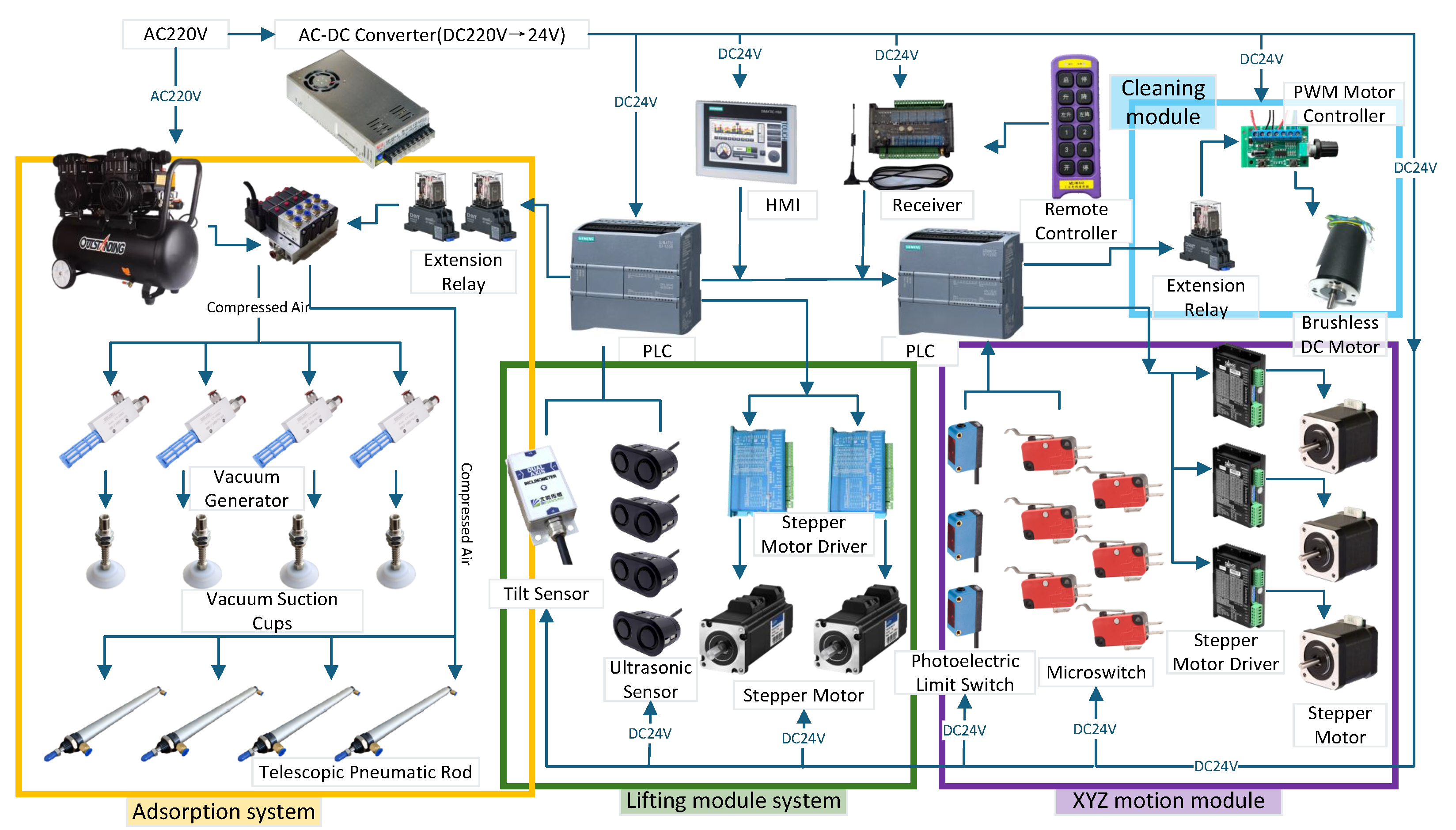
The cleaning robot control system is constructed using an industrial-grade programmable logic controller (PLC) to build a distributed control architecture, which features: (1) multi-axis motion control, (2) sensor fusion (signal response time of 10 ms), (3) fault self-diagnosis as the three core functionalities. A sensing network composed of contact sensors, an ultrasonic array (detection range of 50–300 mm), and MEMS inclinometer sensors (accuracy ±0.1°) is integrated to enable obstacle detection, attitude closed-loop control, and safety protection within a three-dimensional space. The hardware diagram of the control system is shown in Figure 7.
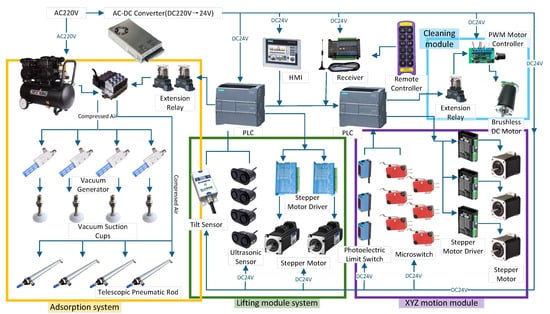
Figure 7.
Schematic diagram of main platform hardware connections.
The system assigns independent PLC controllers for both the lifting module and the XYZ motion module. In the control architecture design, a master–slave structure is adopted, with the lifting module PLC acting as the master controller and the XYZ motion module PLC serving as the slave device. The two PLCs communicate via Siemens S7 to enable real-time data exchange. This distributed architecture, with dual PLCs in collaborative control, effectively enhances the system’s reliability and interchangeability while ensuring motion control precision. The lifting module and XYZ motion module are controlled by a motion control system employing an S-shaped velocity profile. The Siemens S7-1200 series PLC integrates an S-curve algorithm in its motion control commands, enabling smooth velocity regulation and minimizing start–stop shocks. The master controller can monitor and coordinate the operational status of the motion units in real time, meeting the high-precision motion control demands under complex working conditions. A hybrid control mode has been specifically developed, enabling multi-module coordinated operations (such as in obstacle-crossing scenarios) as well as independent execution of specialized tasks, such as edge cleaning and local repeated cleaning.
The system adopts a hierarchical control architecture for building cleaning operations: the upper-level master control system coordinates the collaborative operation of the lifting module, XYZ motion module, and cleaning module. The control strategy supports two working modes: (1) Collaborative mode: modules execute the cleaning process based on a preset task sequence to achieve fully automated operation. (2) Independent mode: for special working conditions (such as irregular façades or local stubborn stains), modules can execute specialized tasks based on manual remote control. Figure 8 provides a detailed presentation of the control system’s topology and the information exchange process between modules.
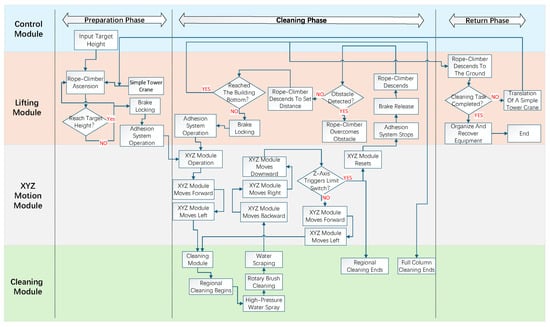
Figure 8.
Integrated control system of the robot.
3. Motion and Obstacle-Traversal Strategies
For various potential obstacles on high-rise curtain walls, the robot adopts an autonomous recognition and adaptive obstacle-crossing strategy. Through ultrasonic sensors, the robot’s main platform can perceive surrounding obstacles in real time during the lifting process and automatically adjust its movement trajectory and cleaning strategy to safely and effectively cross the obstacles.
3.1. Operational Workflow
3.1.1. Preparation Phase
1. Roof Area Deployment: The rooftop equipment comprises an air compressor, water pump, cables, water pipes, and synchronous belts. Four synchronous belts are suspended at height via a simplified tower crane system, maintaining a safe distance from the building façade. Cables and water pipes form vertical energy and medium transmission channels. 2. Ground Area Deployment: Ground operators assemble the main body of the cleaning robot on a counterweight cart and connect it to the cables, water pipes, air hoses, and synchronous belts lowered from the rooftop to corresponding interfaces. The lower ends of the synchronous belts are anchored to the counterweight cart and tensioned via an adjustment device to maintain a pre-tension force of 200–300 N, ensuring dynamic stability of the lifting module under high-rise wind loads.
3.1.2. Post-Deployment Operation
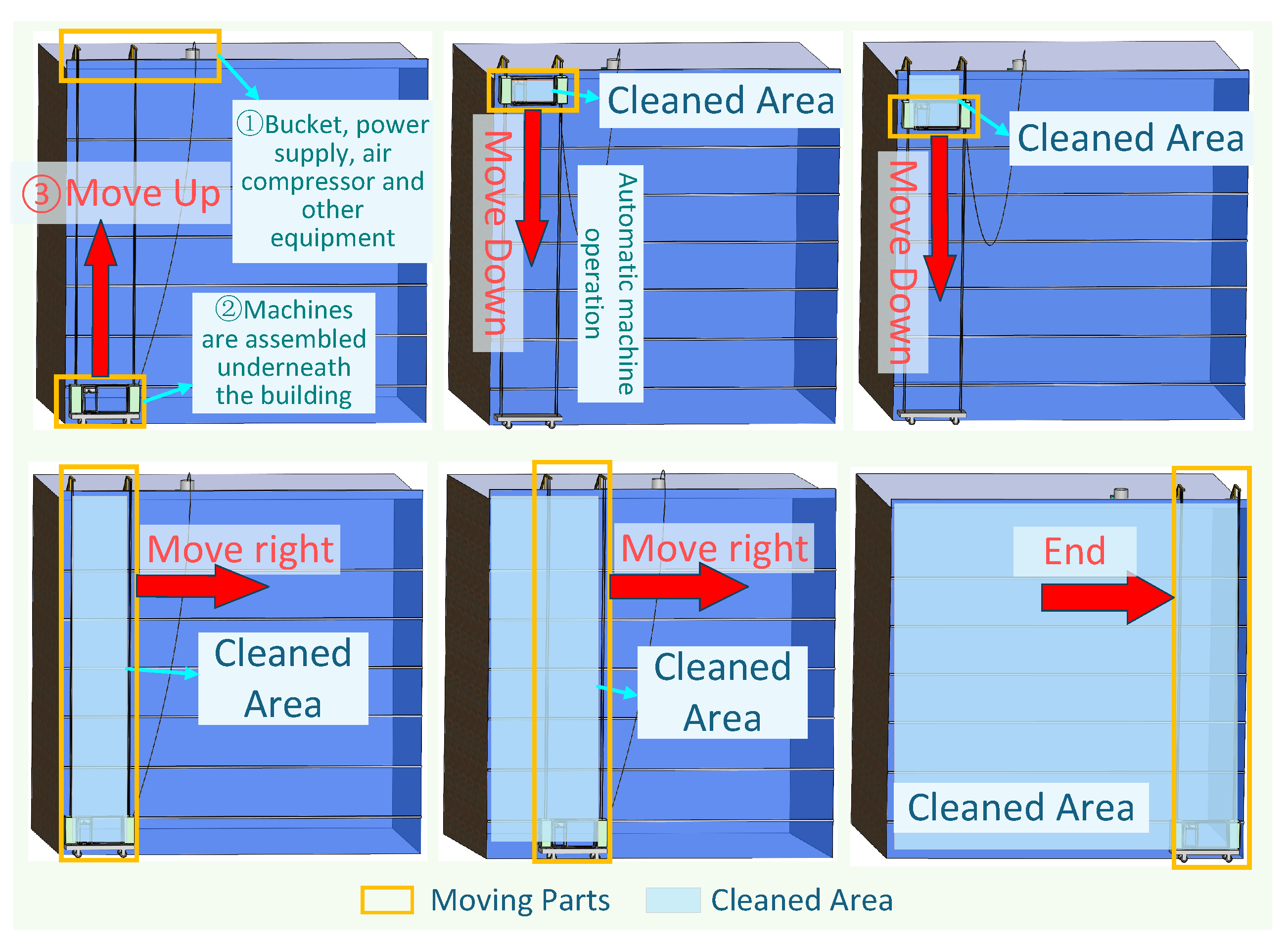
After system deployment, the cleaning robot undergoes a power-on self-test. Operators use a manual control interface to elevate the robot to the target curtain wall apex and activate the preset cleaning program. The workflow is illustrated in Figure 9.
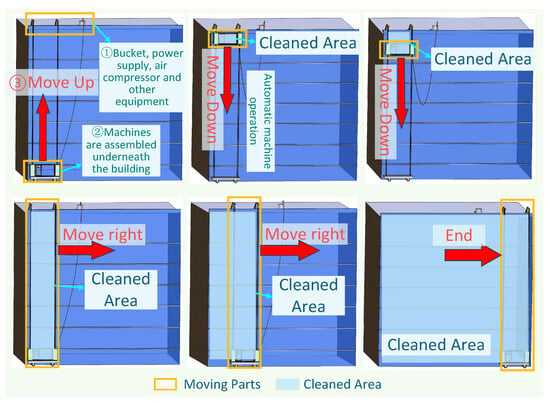
Figure 9.
Exterior wall cleaning procedure.
The robot executes a top-down cleaning sequence integrating three processes: spraying, brushing, and scraping. Cleaning is performed sectionally, with each section size determined by the XYZ module dimensions (1000 mm × 600 mm). Upon completing a section, the robot descends a preset distance (less than 600 mm) to initiate the next adjacent section (Steps 2–3 in Figure 9). When the robot moves to the bottom of the building, it will park on the counterweight trolley at the bottom of the building, and the trolley can move left and right with the simple tower crane on the roof. At this time, the tension of the rope is released, and then the simple tower crane is moved to the side manually. After the movement is completed, the counterweight trolley at the bottom of the building is manually moved to the corresponding position so that the trolley is directly under the simple tower crane (steps 4–5 in Figure 9). After these movements are completed, tension is applied to the rope and the position of the trolley is locked. After the robot is lifted to the roof again, the subsequent cleaning work begins.This cycle repeats until full wall coverage is achieved.
3.1.3. Detailed Cleaning Execution
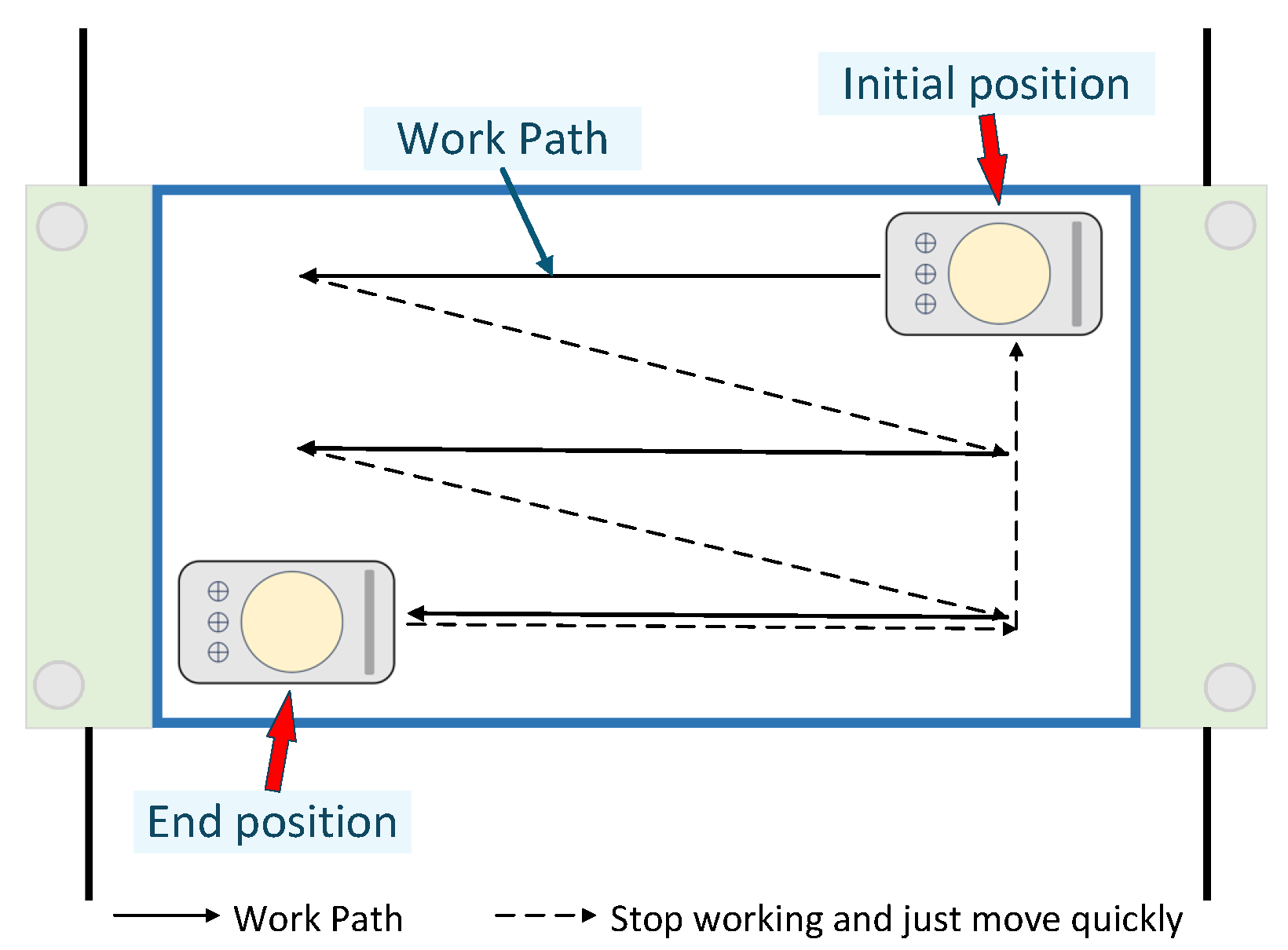
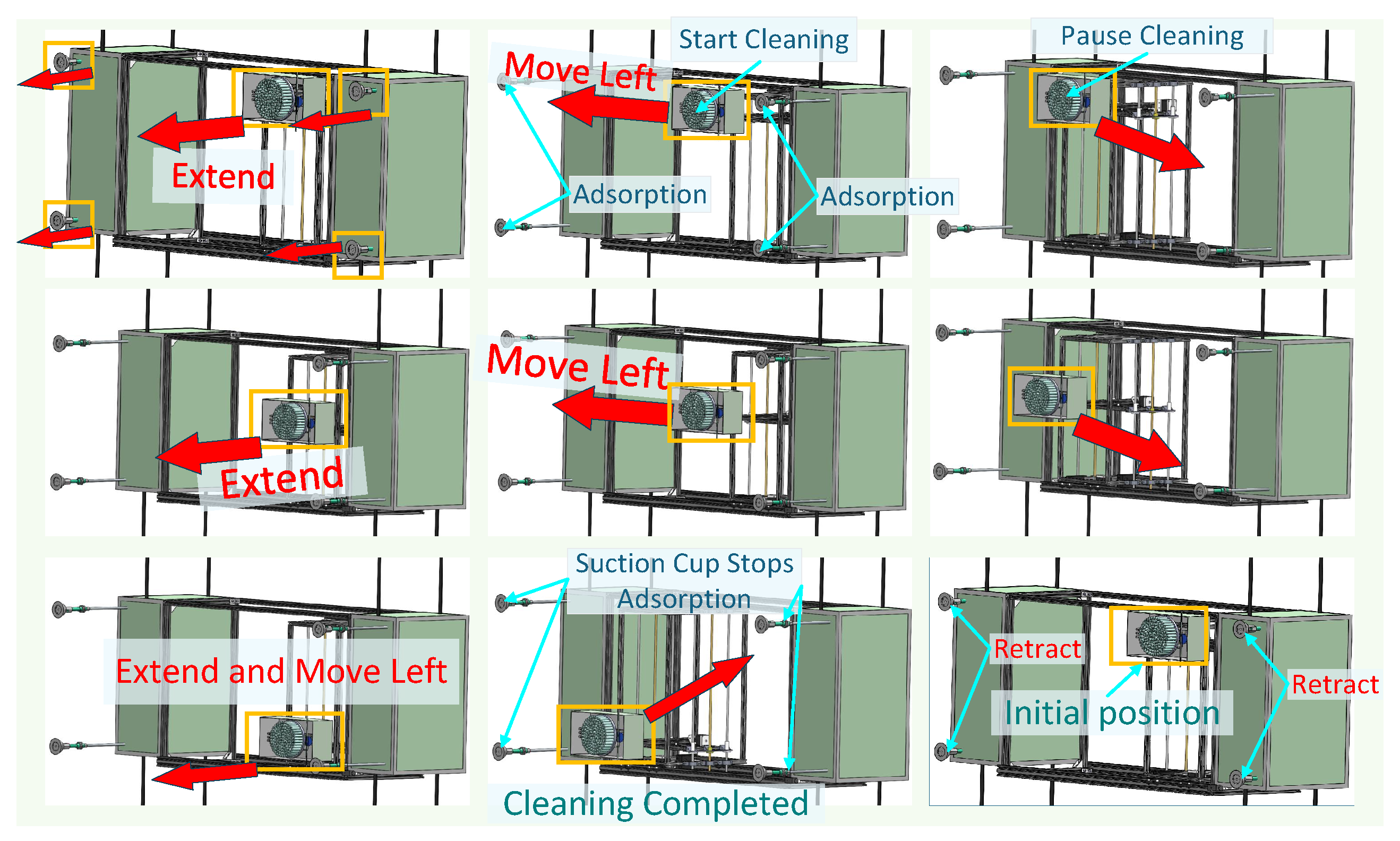
The cleaning sequence initiates with the extension of the lifting module’s pneumatic rod and adhesion of vacuum suction cups to the wall surface. The XYZ motion module then drives the cleaning module forward, activating high-pressure water jets and rotating brushes for localized cleaning, while integrated squeegees remove contaminants. The cleaning path is shown in Figure 10 (solid lines indicate active cleaning with wall contact, dashed lines denote inactive retracted movement). Upon task completion, the cleaning module resets to its initial position, the vacuum suction cups disengage, and the robot descends. The cycle resumes with pneumatic rod extension and suction cup reactivation, repeating the steps, as shown in Figure 11.
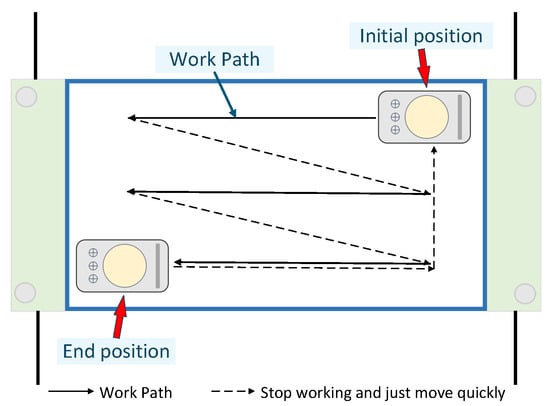
Figure 10.
Path planning of the cleaning module (solid lines denote cleaning operations; dashed lines denote rapid movement only).
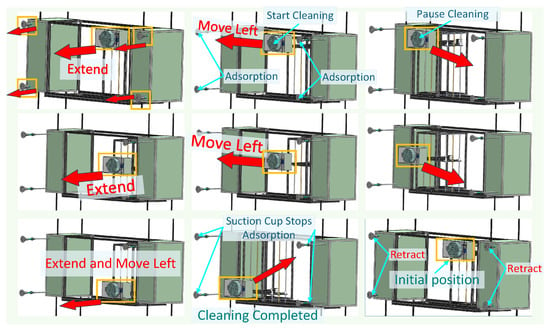
Figure 11.
Workflow diagram of robotic cleaning.
3.2. Obstacle-Traversal Strategy
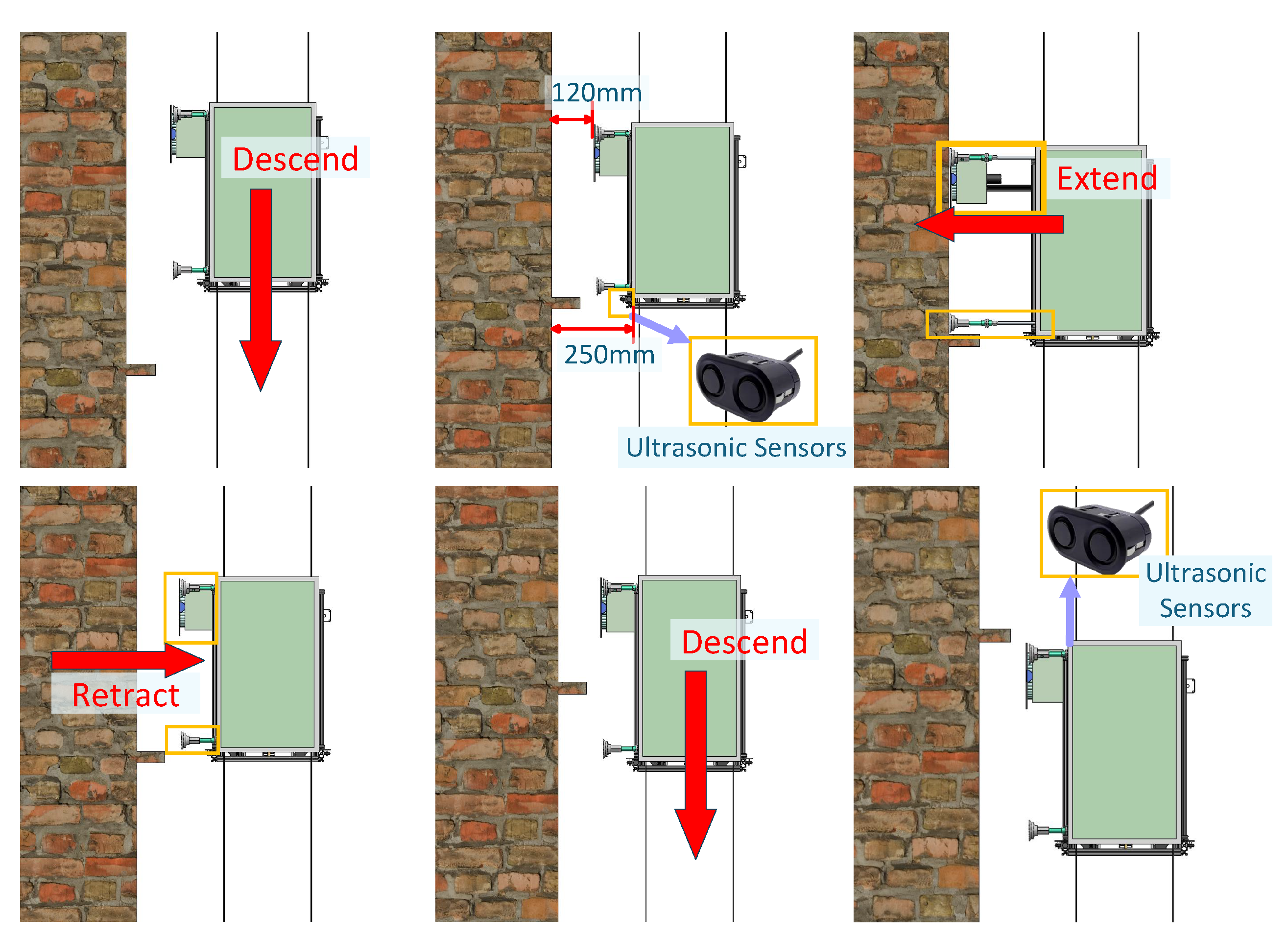
In this study, the vertical façade obstacle-crossing capability of the cleaning robot is controlled using the PLC (Programmable Logic Controller) and ultrasonic sensors. The ultrasonic sensors are positioned at the four corners of the robot’s main frame to detect surrounding obstacles. Since the robot’s main body is suspended from the wall and only the suction cups and cleaning module extend to make contact with the vertical façade during cleaning operations, the robot can directly cross obstacles (provided the obstacle height is less than the distance between the robot and the wall) during its ascent or descent. Figure 12 illustrates the schematic diagram of the robot crossing an obstacle. The ultrasonic sensor has a range of 50–300 mm; when the detection distance is less than 245 mm, the obstacle-crossing process is triggered. When it is less than 130 mm, the cleaning robot stops.
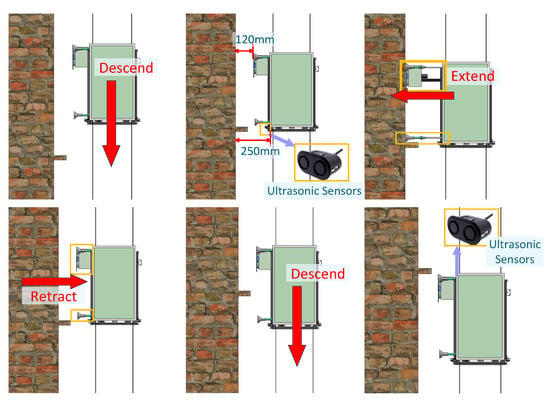
Figure 12.
State diagram of the robot obstacle-traversal process.
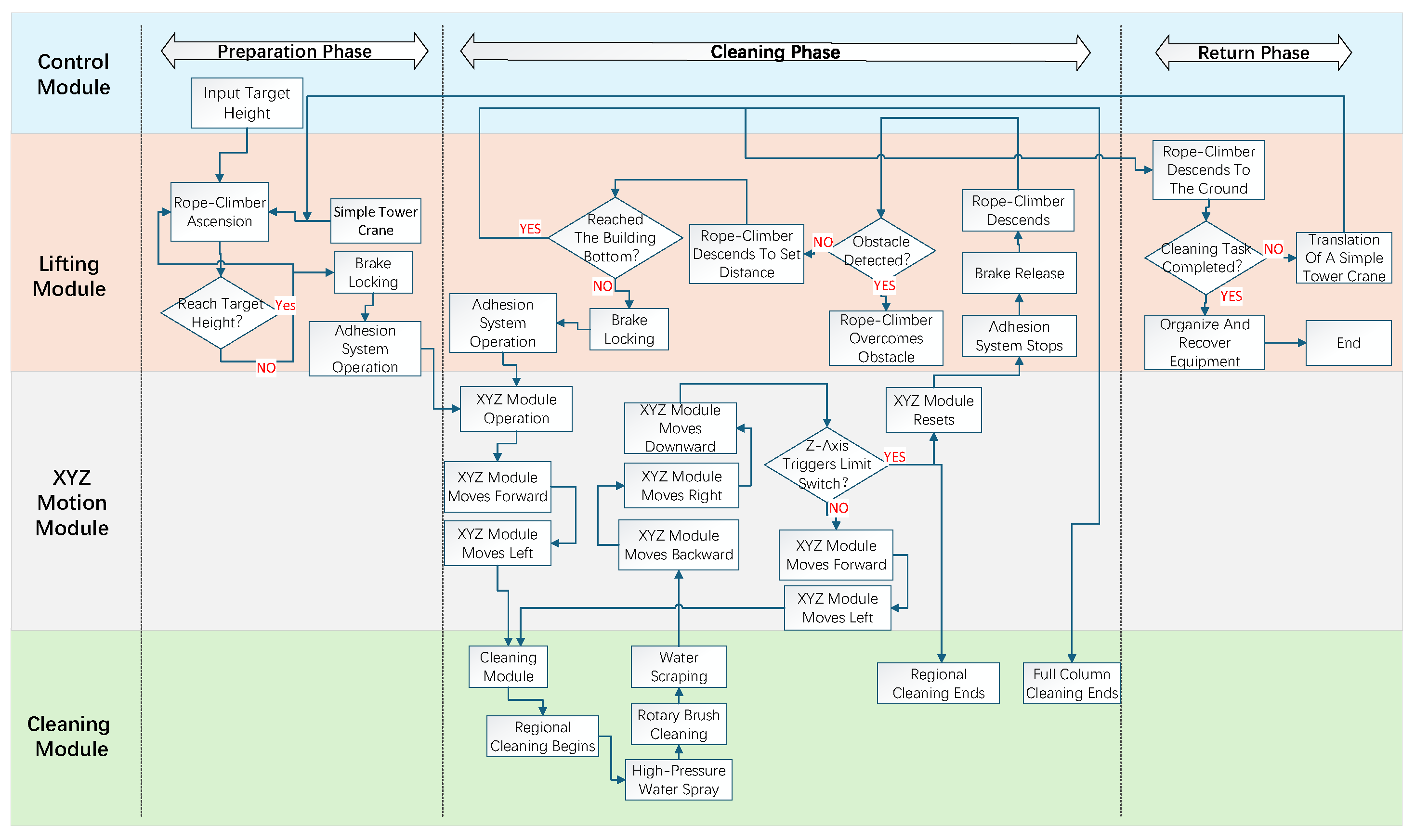
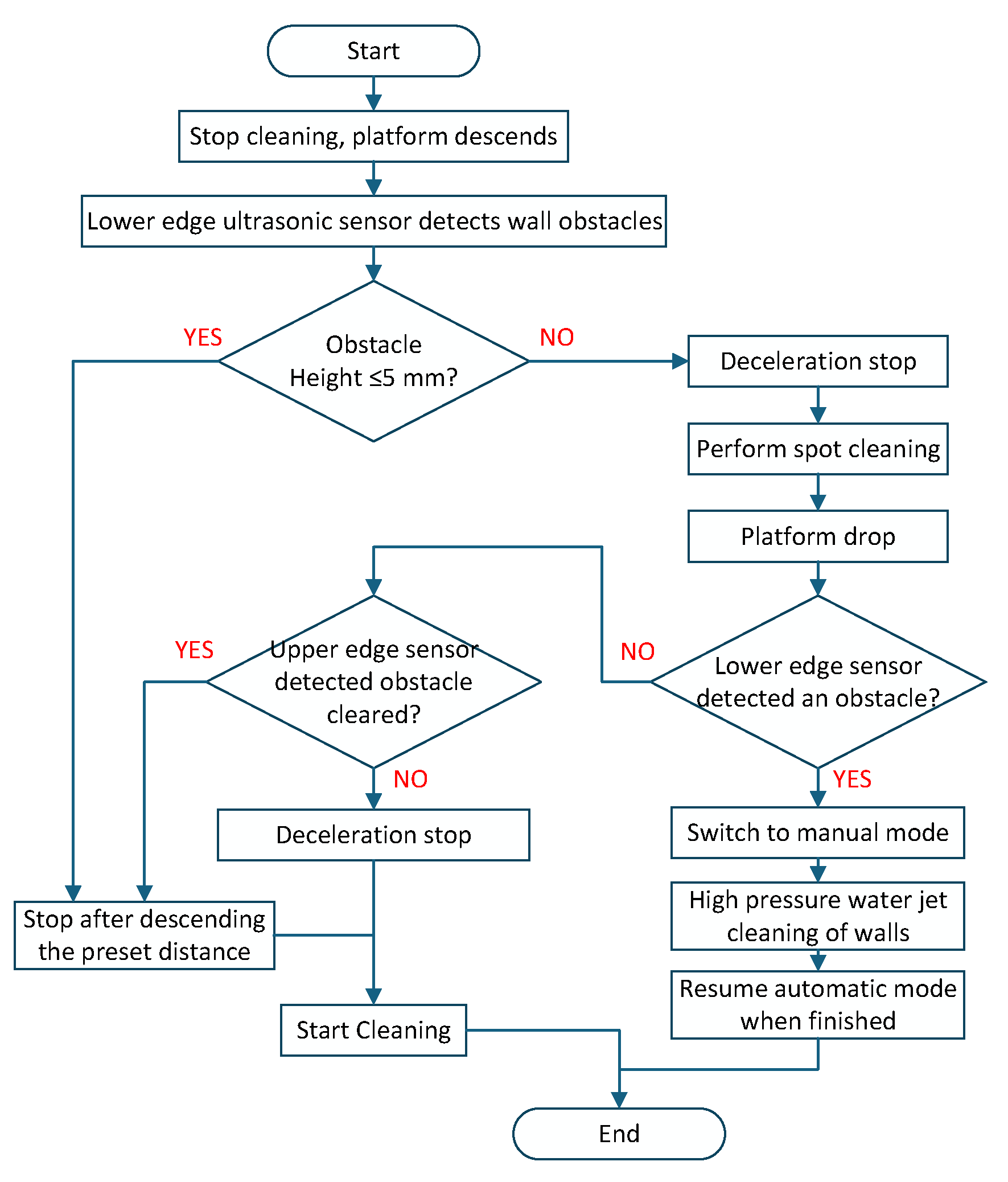
The specific obstacle-crossing process is as follows (the flow chart is shown in Figure 13):
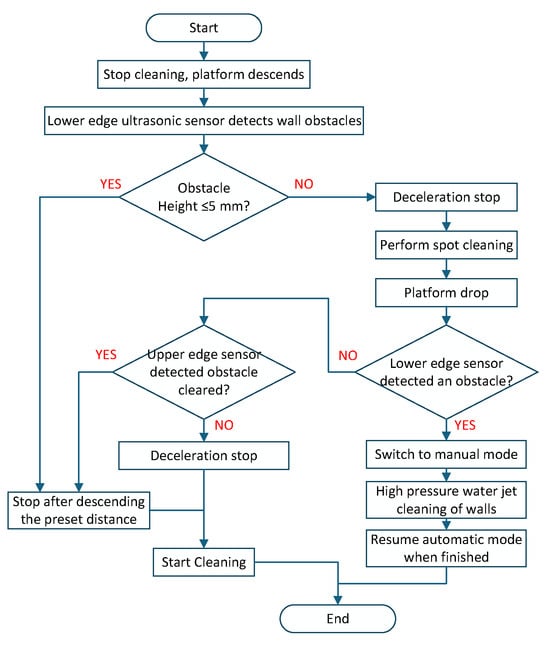
Figure 13.
Flow chart for cleaning robot overcoming obstacles.
1. During platform descent, an ultrasonic sensor installed on the robot’s lower side (250 mm from the wall surface) emits ultrasonic waves to detect protrusions on the wall (height: 5–120 mm; protrusions ≤ 5 mm are directly traversed). Upon obstacle detection, the lifting platform immediately decelerates to a halt and performs localized cleaning of the covered area.
2. After cleaning completion, the platform resumes its descent to traverse the obstacle.
3. When the upper-edge ultrasonic sensor confirms obstacle clearance (with no new obstacles detected by the lower sensor), the platform decelerates to a halt and initiates cleaning.
During the obstacle-crossing process, when the distance between the upper and lower obstacles is less than the height of the robot, the cleaning module will be unable to directly reach the area. In this case, the manual mode can be used to perform high-pressure water cleaning solely on the wall surface. The cleaning module is positioned over the area using the remote control, with the cleaning module and pneumatic rod no longer extending. Only the high-pressure nozzle is activated to clean the wall surface. Once this area is cleaned, the system can be switched back to the automatic cleaning mode for subsequent cleaning tasks.
4. Experimental Validation
4.1. Lifting and Obstacle-Traversal Tests
The components of the lifting module are mounted on an acrylic plate, as shown in Figure 14. A cover plate was designed to confine the synchronous belt’s motion and press it against the synchronous pulley, thereby preventing slippage. To mitigate potential twisting of the synchronous belt during high-altitude operation, the synchronous belt guide channel was integrated to rectify belt alignment. The rope inlet and outlet of the lifting mechanism are equipped with synchronous belt guide grooves to keep the synchronous belt in the predetermined direction. When installing the synchronous belt, ensure that there is no relative twisting between the top and bottom of the synchronous belt. When the synchronous belt is partially twisted during operation, the guide groove will correct it to ensure smooth lifting.

Figure 14.
Lifting module structure.
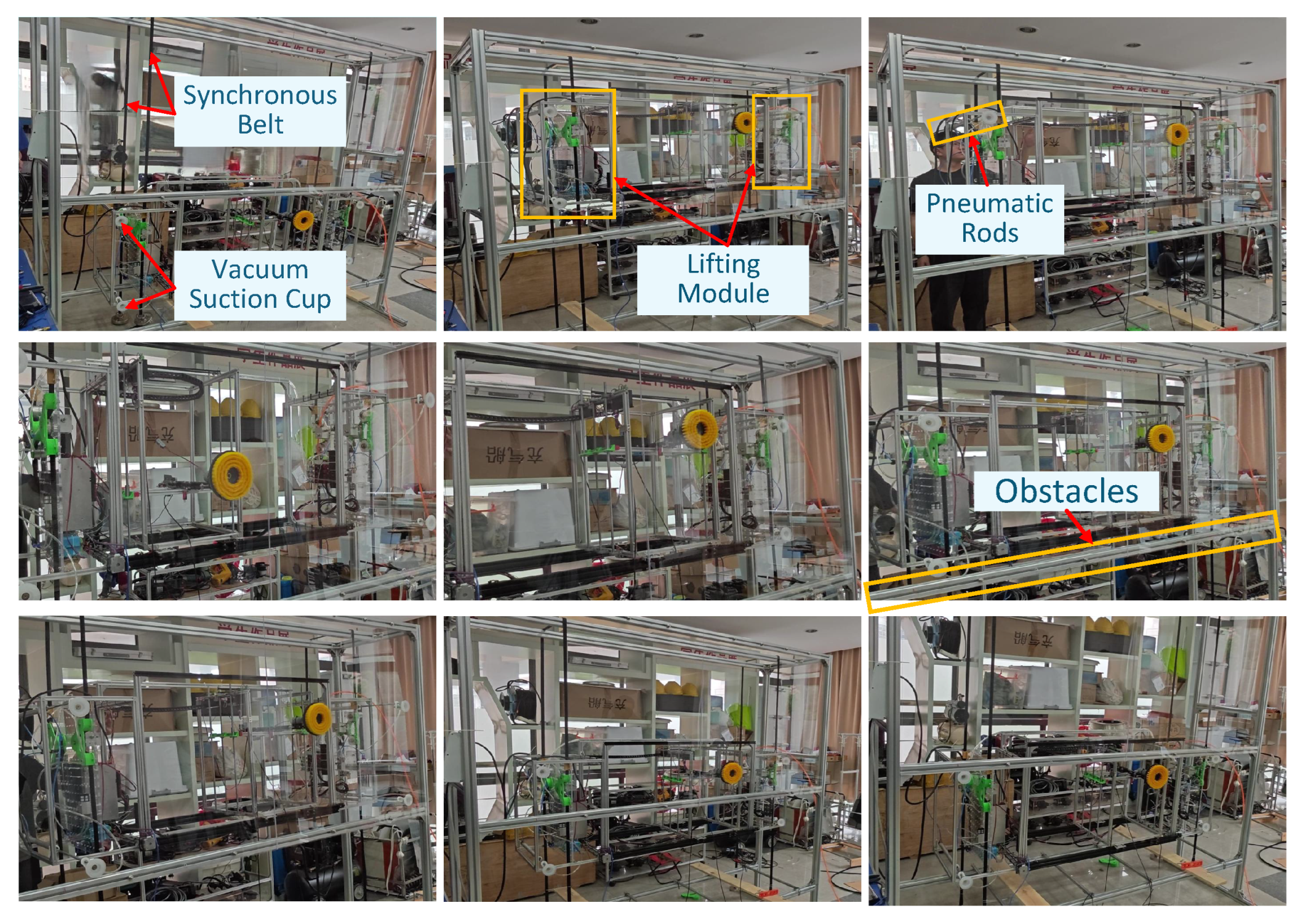
To evaluate the robot’s actual performance, a series of indoor experimental tests were conducted. The results demonstrated that the robot could stably ascend and move on vertical walls, effectively overcome obstacles, and successfully complete the intended cleaning tasks. Moreover, the robot’s stability and safety during operation were thoroughly verified. Notably, the robot remained securely in position even in the event of a sudden power failure, preventing any risk of falling.The operation experiments of the lifting platform are shown in Figure 15.
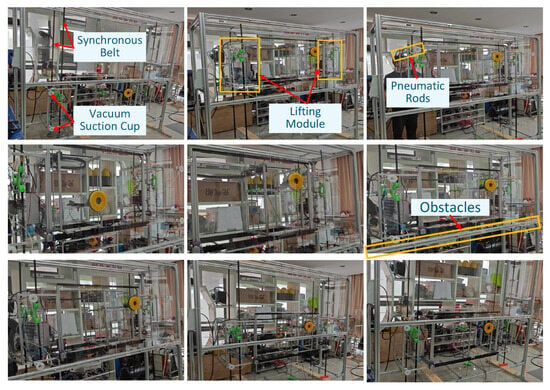
Figure 15.
Operation experiments of the lifting platform.
The experimental results indicate the following:
1. The experimental results for the lifting platform demonstrate that it can perform stable lifting operations, with smooth initiation and termination during ascent and descent. The tilting angle deviation between the left and right sides is maintained within 2 degrees. When supporting a load of 30 kg, the rope-climbing mechanism does not exhibit slippage.
2. The stability and reliability of the worm gear transmission structure have been verified. In the event of a motor power failure, the platform does not fall but remains at its current height due to the self-locking property of the worm gear mechanism.
3. The pneumatic rods and vacuum suction cups enable the platform to adhere stably to the wall surface. During the operation of the XYZ motion module, the cleaning robot exhibits no significant oscillations. The laser tracker measurement method was employed, and the highest achievable repeatability of the XYZ motion module was 0.1 mm when the end load was 3 kg.
4. The four synchronous belts have tensioning force, which can limit the rotation of the lifting platform within a certain range. At the same time, the four suction cups are driven by retractable gas rods. The length of the gas rods is greater than the distance between the lifting platform and the wall. Therefore, when the four gas rods are fully extended, the four suction cups will contact the wall. A spring is installed at the connection between the retractable gas rods and the suction cups to cushion the impact during adsorption.
4.2. Cleaning Performance Tests
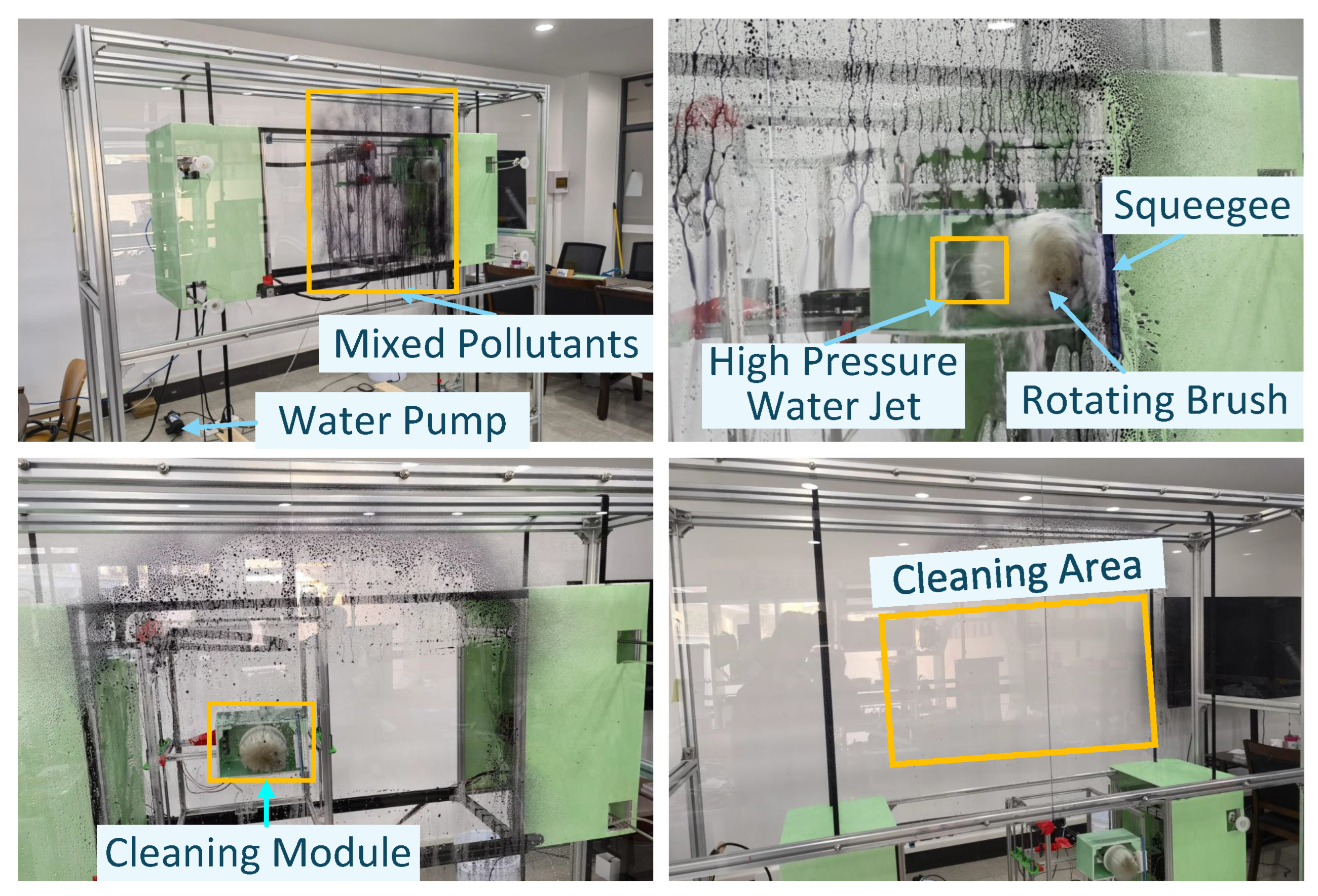
Following the preliminary enclosure of the machine, glass panels are mounted on indoor frames to simulate the operational environment of high-rise curtain walls, where the cleaning performance of the robot is evaluated. As shown in Figure 13, ink, oil stains, and dust are applied to the glass panels to replicate the contamination of a high-rise building’s façade. After the contaminants have fully set, cleaning tests are conducted. The cleaning experiment is carried out in manual control mode (using a remote control), focusing on a small section of the glass and comparing it with the untreated area. The process of the cleaning experiment is illustrated in Figure 16.
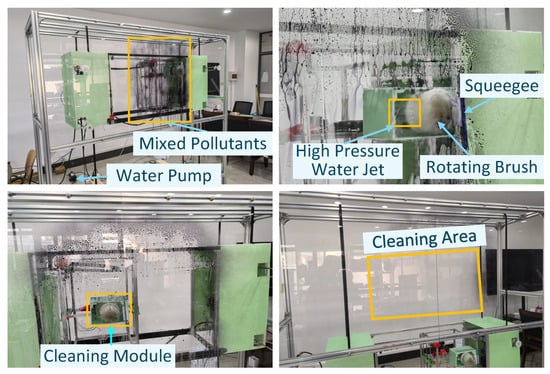
Figure 16.
Cleaning experiments.
4.3. Analysis of Cleaning Efficiency
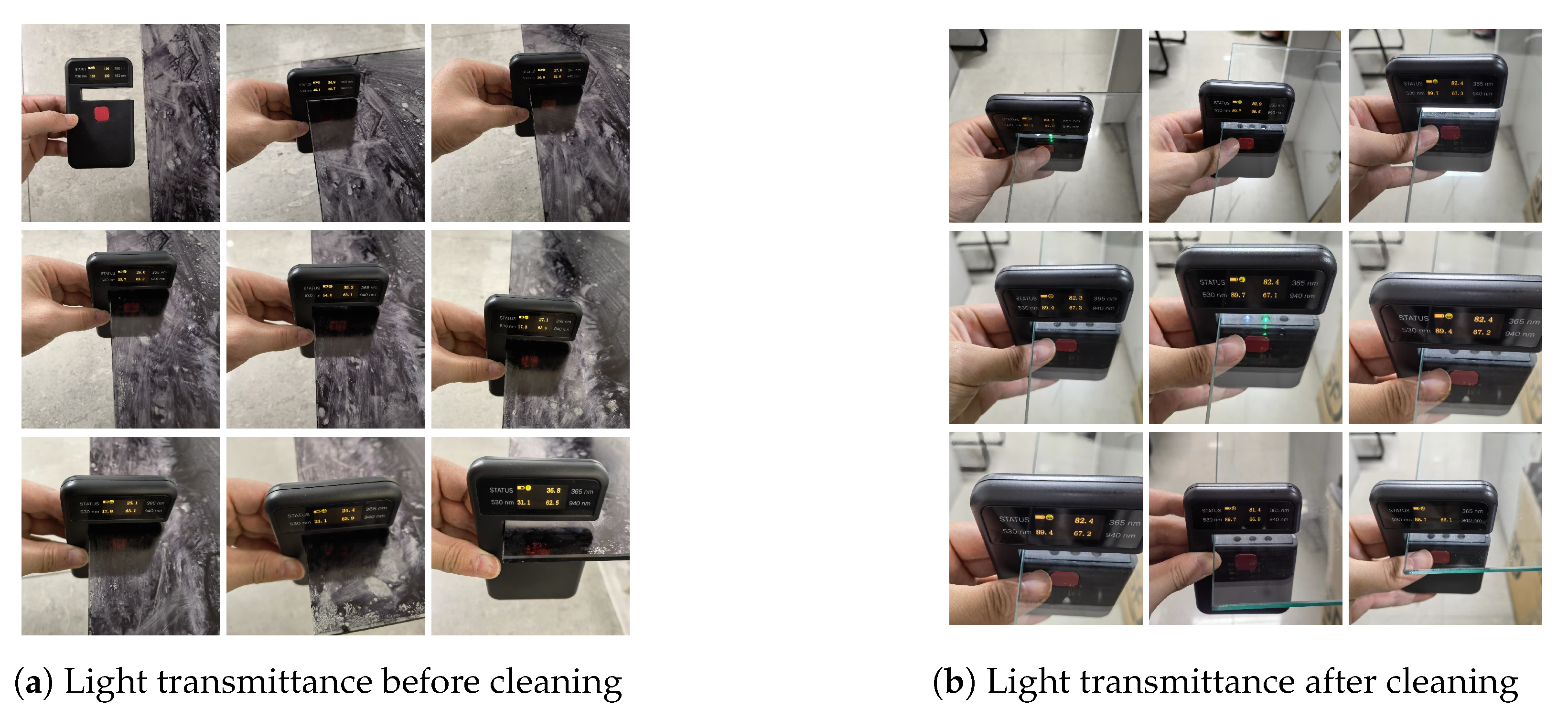
The cleaning efficiency of the robot was quantified using the rate of light transmittance change (pre- vs. post-cleaning) and water consumption. The transmittance of the curtain wall glass surface was measured before and after cleaning, as shown in Figure 17, and the change in transmittance was used to assess the cleaning effectiveness. A CT-23 optical transmittance detector was employed for the measurements. To ensure the accuracy of the results, measurements were taken at multiple points. Figure 17 presents a subset of the measurement data.
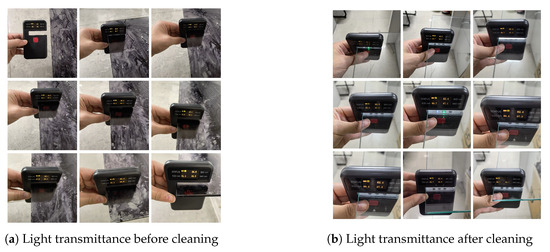
Figure 17.
Light transmittance before and after cleaning.
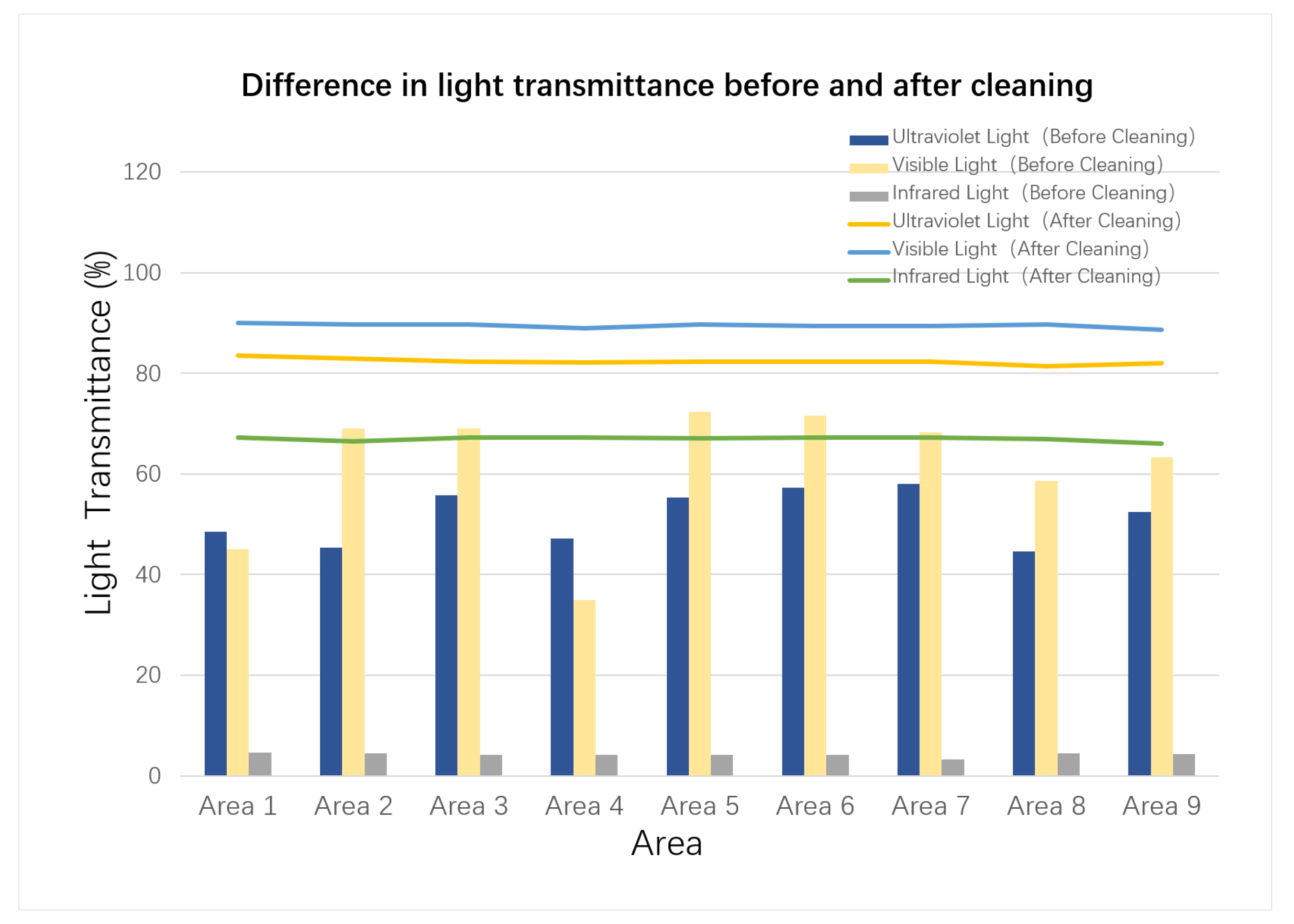
Measurement data were collected and organized, with nine sets of data selected, as shown in Figure 18 below.
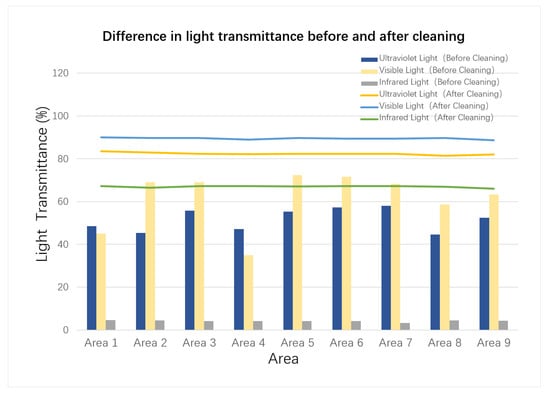
Figure 18.
Difference in light transmittance before and after cleaning.
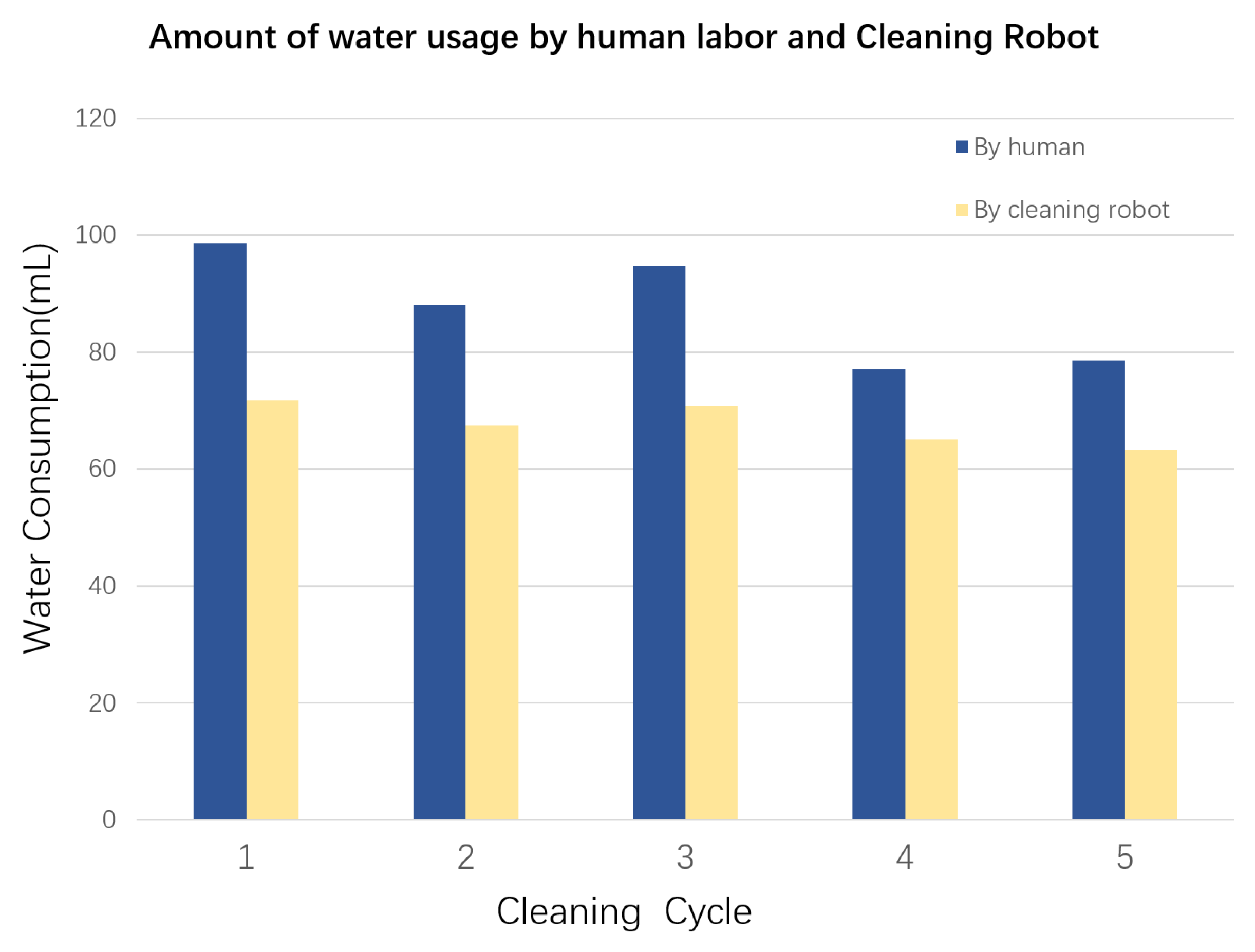
Figure 19 compares the cleaning efficiency between manual labor and the robotic system on a 1.5 m × 3 m glass panel. Five workers consumed an average of 87 mL of water, while the robot used 68 mL, achieving 21.8% water savings.
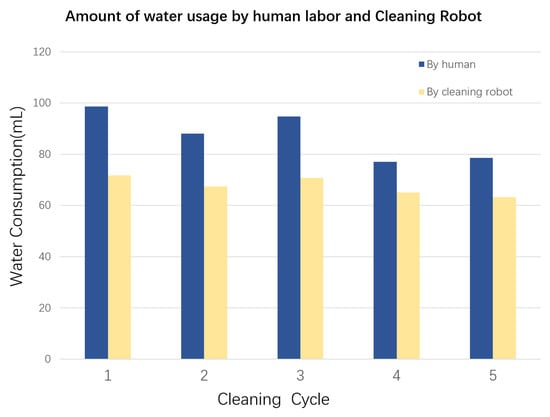
Figure 19.
Water consumption comparison between human labor and façade-cleaning robot system.
Experimental results indicate that the robot can significantly improve the light transmittance of curtain walls, demonstrating remarkable cleaning performance. As shown in Figure 18, the maximum difference in visible light transmittance before and after cleaning reaches 72.4%, while the minimum difference between the post-cleaning transmittance and the initial transmittance (i.e., the transmittance when the glass is completely clean) is only 0.4%. These data highlight the excellent cleaning efficiency of the robot.
5. Discussion
This study developed a high-altitude façade-cleaning robot that employs a tethered method for wall climbing. Existing tethered climbing robots predominantly use single-cable winch systems for elevation, which restricts their size and limits the cleaning coverage per vertical traversal. In contrast, the proposed robot utilizes four cables for lifting and features a wider chassis, enabling a significantly expanded cleaning range. A comparable system, Skyline Ozmo, also adopts a four-cable lifting mechanism with a broad chassis and utilizes robotic arms for cleaning, offering high flexibility. However, it lacks adhesion mechanisms, relying solely on wheels mounted on the lifting platform for façade movement. This design leads to substantial swaying during robotic arm operation. To enhance stability, our robot incorporates an adhesion mechanism: during operation, the lifting platform adheres to the façade via vacuum suction cups. When the lifting platform ascends or descends, strong wind disturbances may induce lateral motion. The current solution involves maintaining tension in the cables, though this approach does not fully resolve the issue. Further discussion includes: implementing wind speed monitoring, where the robot operates normally at wind speeds below 8 m/s, reduces descent speed at 8–12 m/s, and halts operation with suction cups adhered to the façade for stability at speeds exceeding 12 m/s; and recognizing that the lifting phase occupies a minor proportion of the total cleaning cycle, with the robot remaining in a stable adhered state for most of the operational time. Compared to robotic arms, the XYZ motion module in this design exhibits reduced flexibility but still provides three-directional mobility sufficient for façade-cleaning tasks. Additionally, the XYZ module offers advantages in terms of its lower weight, reduced cost, and simpler structural configuration. By integrating the lifting module, XYZ motion module, and cleaning module, the robot achieves efficient high-rise façade cleaning, improving cleanliness and reducing water consumption compared to manual methods. Future work will focus on optimizing lifting platform stability during vertical movement and implementing autonomous path planning for the XYZ module to achieve more stable and intelligent cleaning operations.
6. Conclusions
This paper presents the modular structure of a high-rise curtain wall cleaning robot, designs an integrated control system for the cleaning motion, and conducts prototype cleaning experiments. It further describes the lifting module responsible for the vertical motion and stable adhesion of the cleaning robot on the façade of high-rise buildings, the XYZ motion module responsible for driving the end effector (i.e., the cleaning module) within the cleaning robot’s travel range, the cleaning module responsible for the curtain wall cleaning, and the cleaning robot system that controls the coordination of all modules. A novel rope-climbing mechanism is designed, using a synchronous belt instead of the traditional nylon rope or steel cable, simplifying the control system and improving the precision of the robot’s vertical movement and positioning on the wall. Lifting and obstacle-crossing experiments were conducted on an indoor test rig, where the robot successfully overcame obstacles up to 12 cm, accelerated and decelerated smoothly, and hovered accurately at specified locations, thereby validating the performance of the lifting platform as well as the integrated control technology of the robot system. To assess the cleaning efficiency of the robot, glass panels were installed on the indoor test rig for cleaning experiments. The analysis confirms that the robot achieves a maximum transmittance improvement of 72.4% and 21.8% water savings compared to manual methods, validating its exceptional performance in glass curtain wall cleaning applications.
In the future, we will consider expanding the robot’s capability to clean curved façades and integrating AI-based path planning to enhance its autonomy and efficiency. Additionally, further modular expansion will allow for adaptation to different cleaning environments and requirements.
Author Contributions
Conceptualization, P.F. and C.L.; methodology, P.F. and C.L.; software, P.F. and Y.L. (Yujun Li); validation, P.F., C.L. and S.L.; formal analysis, P.F.; investigation, P.F., Z.C. and M.Y.; resources, P.F.; data curation, P.F.; writing—original draft preparation, P.F.; writing—review and editing, P.F. and C.L.; visualization, F.Y., L.S. and Y.L. (Yang Liu); supervision, C.L., S.L., Y.L. (Yujun Li), F.Y., Y.L. (Yang Liu), L.S., Z.C. and M.Y.; project administration, C.L.; funding acquisition, C.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Data is contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Serra, V.; Zanghirella, F.; Perino, M. Experimental evaluation of a climate façade: Energy efficiency and thermal comfort performance. Energy Build. 2010, 42, 50–62. [Google Scholar]
- Amirkhani, M.; Garcia-Hansen, V.; Isoardi, G.; Allan, A. Innovative window design strategy to reduce negative lighting interventions in office buildings. Energy Build. 2018, 179, 253–263. [Google Scholar]
- SERBOT Cleaning Robots. 2015. Available online: https://www.serbot.ch/en/solar-panels-cleaning/pvclean-master-robot (accessed on 27 March 2025).
- Lee, H.; Yu, B.; Tirtawardhana, C.; Kim, C.; Jeong, M.; Hu, S.; Myung, H. CAROS-Q: Climbing aerial robot system adopting rotor offset with a quasi-decoupling controller. IEEE Robot. Autom. Lett. 2021, 6, 8490–8497. [Google Scholar]
- Yoo, S.; Joo, I.; Hong, J.; Park, C.; Kim, J.; Kim, H.S.; Seo, T. Unmanned high-rise façade cleaning robot implemented on a gondola: Field test on 000-building in Korea. IEEE Access 2019, 7, 30174–30184. [Google Scholar] [CrossRef]
- Fang, Y.; Wang, S.; Bi, Q.; Cui, D.; Yan, C. Design and technical development of wall-climbing robots: A review. J. Bionic Eng. 2022, 19, 877–901. [Google Scholar] [CrossRef]
- Nansai, S.; Onodera, K.; Veerajagadheswar, P.; Rajesh Elara, M.; Iwase, M. Design and experiment of a novel façade cleaning robot with a biped mechanism. Appl. Sci. 2018, 8, 2398. [Google Scholar] [CrossRef]
- Rosyid, A.; El, B. A Large-scale Suction-based Climbing Parallel Robot for Wall Painting Application. In Proceedings of the 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 13–17 May 2024; pp. 2119–2125. [Google Scholar]
- Liu, F.; Luo, L.; Wang, B. A new type design of glass curtain wall cleaning robot. In Proceedings of the 2021 2nd International Conference on Artificial Intelligence and Information Systems, Chongqing, China, 28–30 May 2021; pp. 1–4. [Google Scholar]
- Bisht, R.S.; Pathak, P.M.; Panigrahi, S.K. Design and development of a glass façade cleaning robot. Mech. Mach. Theory 2022, 168, 104585. [Google Scholar]
- Gambao, E.; Hernando, M. Control system for a semi-automatic façade cleaning robot. In Proceedings of the 2006 International Symposium of Automation and Robotics in Construction, Tokyo, Japan, 3–5 October 2006; pp. 406–411. [Google Scholar]
- Seo, K.; Cho, S.; Kim, T.; Kim, H.S.; Kim, J. Design and stability analysis of a novel wall-climbing robotic platform (ROPE RIDE). Mech. Mach. Theory 2013, 70, 189–208. [Google Scholar]
- Fawzy, H.; El Sherif, H.; Khamis, A. Robotic façade cleaning system for high-rise building. In Proceedings of the 2019 IEEE 14th International Conference on Computer Engineering and Systems (ICCES), Cairo, Egypt, 17 December 2019; pp. 282–287. [Google Scholar]
- Akinfiev, T.; Armada, M.; Nabulsi, S. Climbing cleaning robot for vertical surfaces. Ind. Robot. Int. J. 2009, 36, 352–357. [Google Scholar]
- Zhang, H.; Zhang, J.; Zong, G.; Wang, W.; Liu, R. Sky cleaner 3: A real pneumatic climbing robot for glass-wall cleaning. IEEE Robot. Autom. Mag. 2006, 13, 32–41. [Google Scholar]
- Li, Z.; Xu, Q.; Tam, L.M. A survey on techniques and applications of window-cleaning robots. IEEE Access 2021, 9, 111518–111532. [Google Scholar]
- Zhang, D.; Li, Y.; Jia, P.; Jiao, X.; Zheng, Y.; Wang, G.; Li, Z.; Zhang, M.; Wang, J.; Li, M. A full-coverage path-planning algorithm for a glass-curtain-wall-cleaning robot driven by ropes. Appl. Sci. 2023, 13, 5052. [Google Scholar] [CrossRef]
- Yoo, S.; Kim, T.; Seo, M.; Oh, J.; Kim, H.S.; Seo, T. Position-tracking control of dual-rope winch robot with rope slip compensation. IEEE/ASME Trans. Mechatronics 2021, 26, 1754–1762. [Google Scholar]
- Skyline Ozmo. 2023. Available online: https://www.skylinerobotics.com/meet-ozmo (accessed on 27 March 2025).

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).