Control of Adjustable Compliant Actuators



Abstract
:1. Introduction
2. The Adjustable Compliant Actuator
2.1. Compliant Actuators

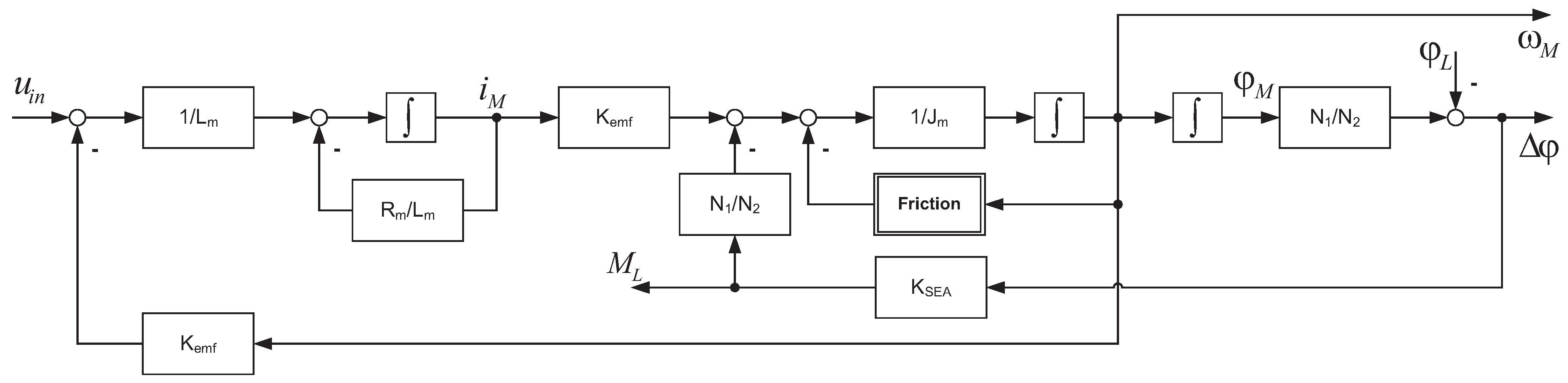
2.2. System Model

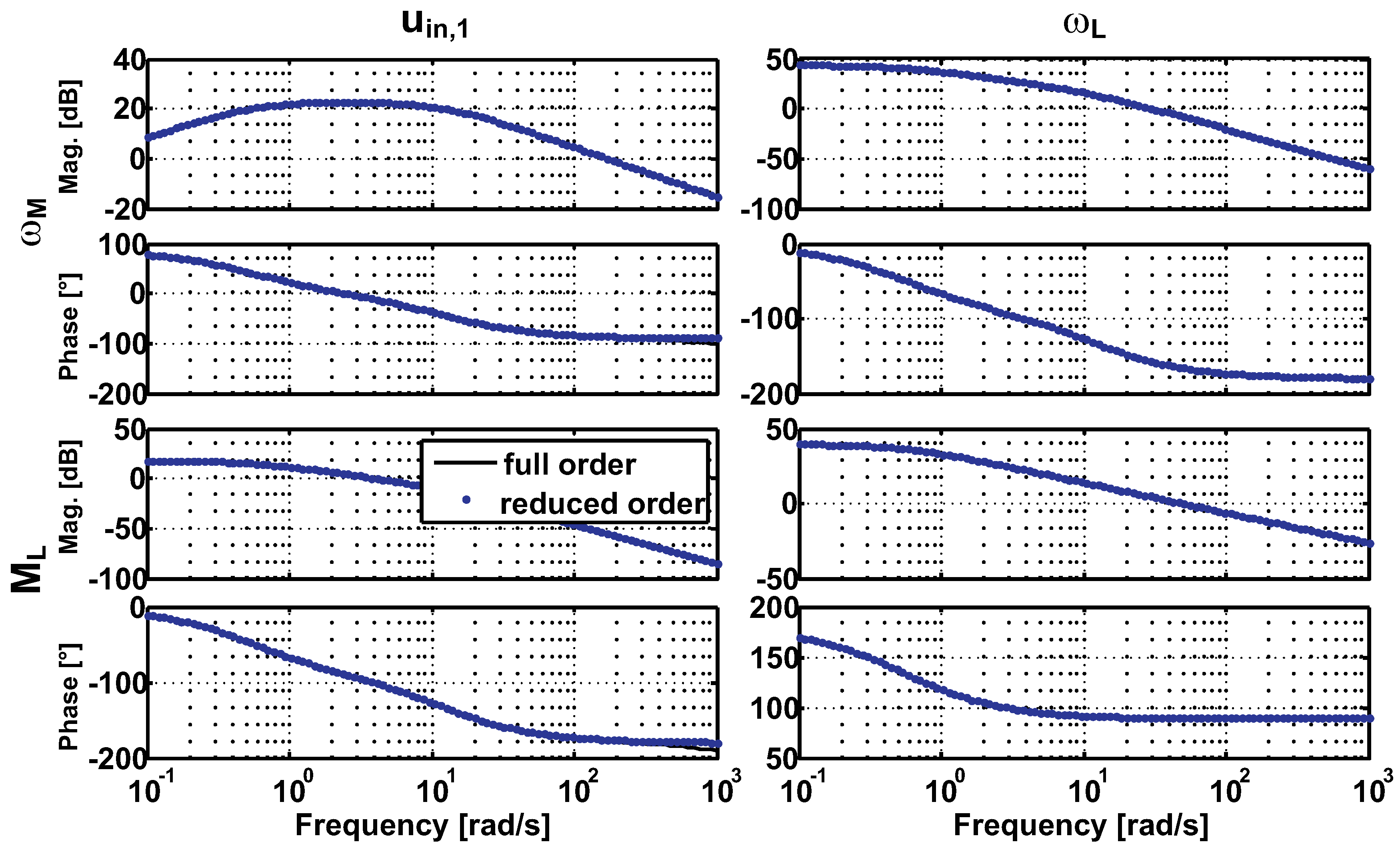
2.3. Current Control and Model Reduction
- is positive-real (PR)
- is Hurwitz and , (with denoting the complex conjugate transpose)
- , such that

3. Controller Design
3.1. Cascaded Control Design


3.2. Augmented Torque Control
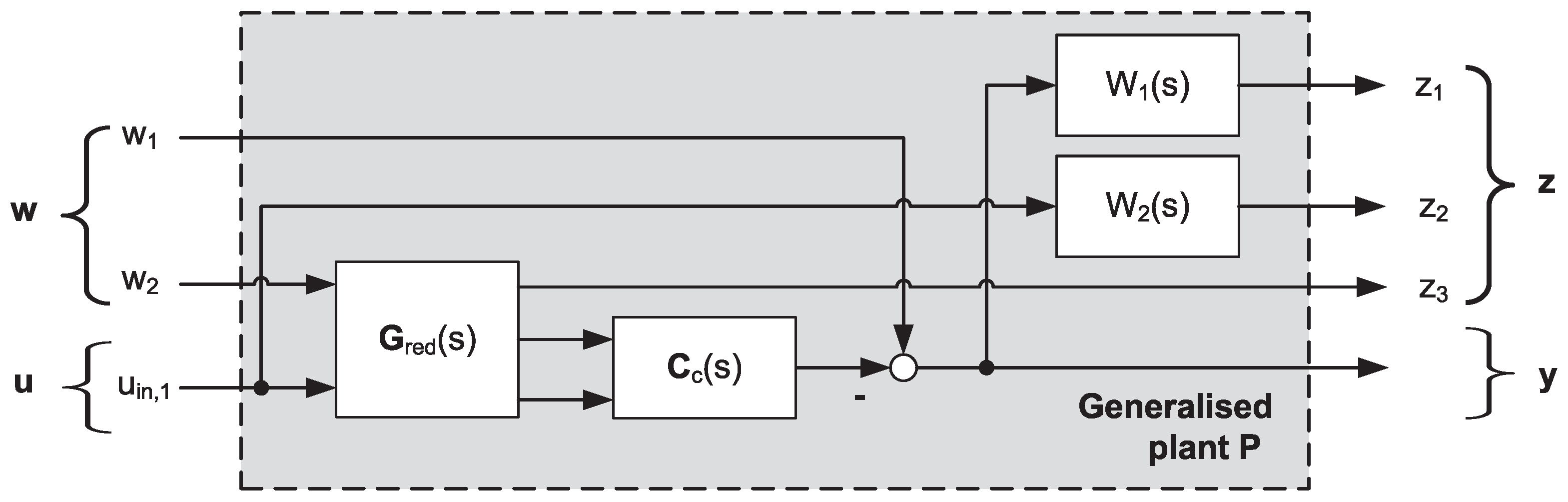
3.3. Strictly Positive-Real Controller Design

- () is controllable and observable
- () is controllable and observable
- and .
4. Simulation and Experimental Results
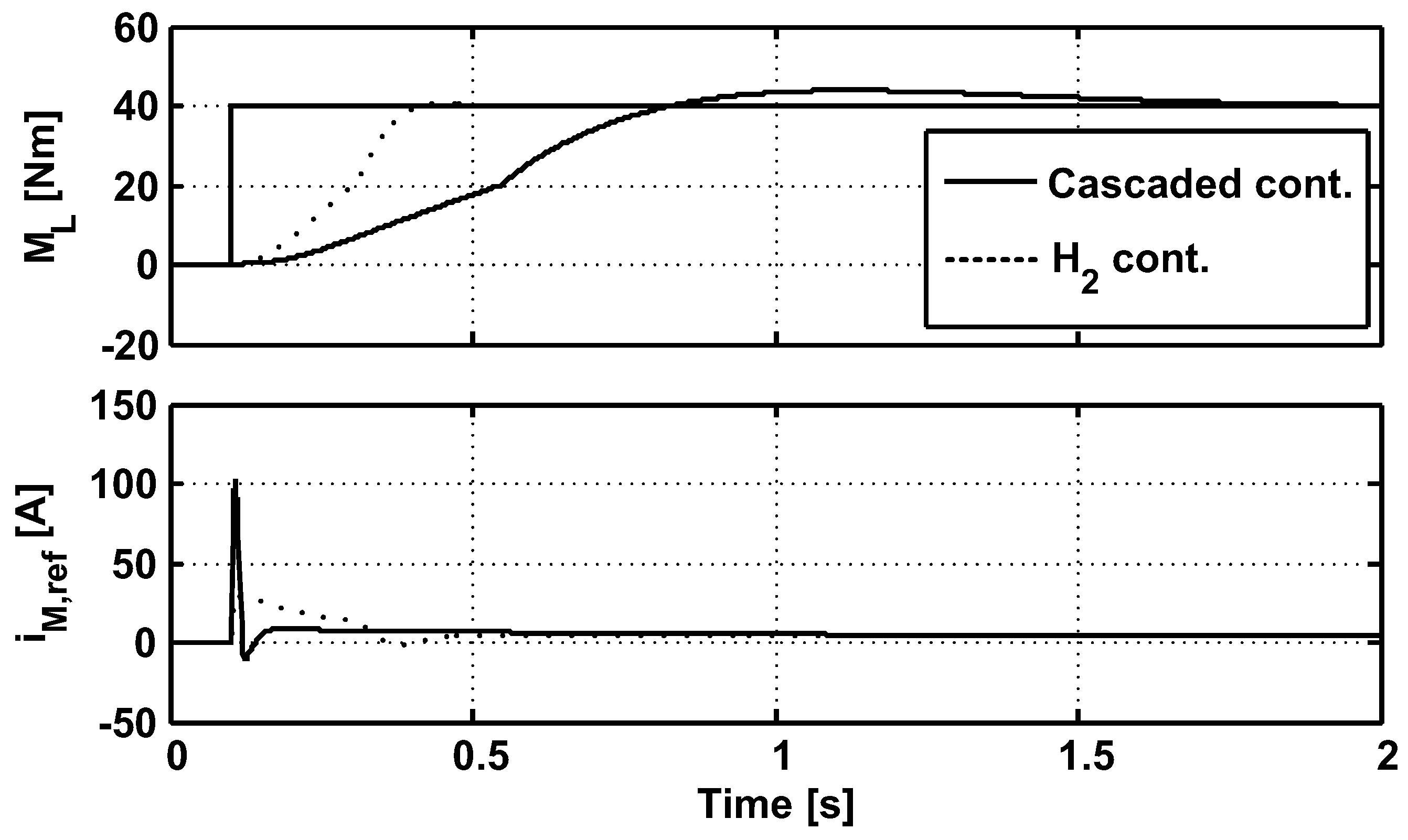
4.1. Simulation Results


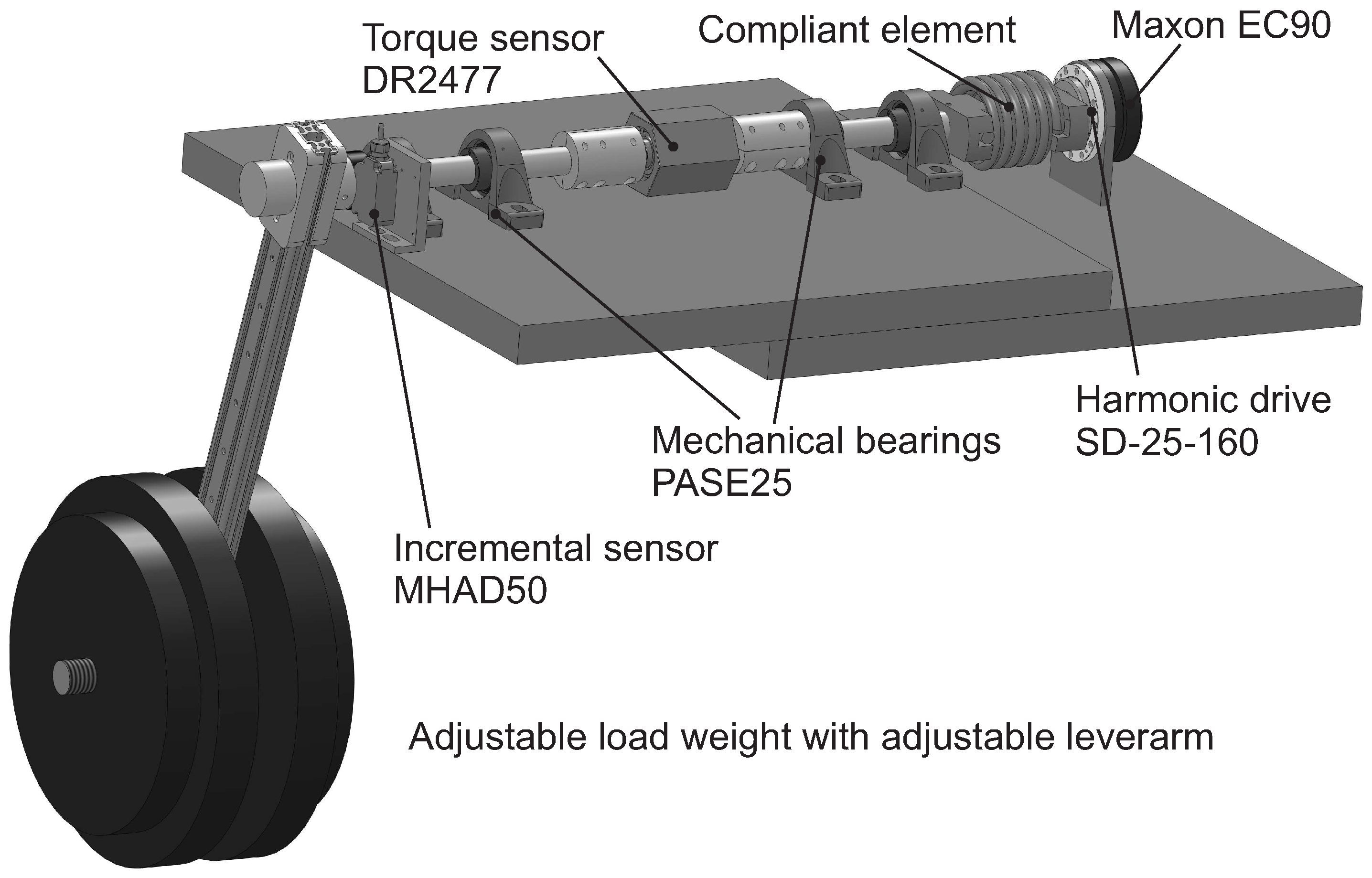
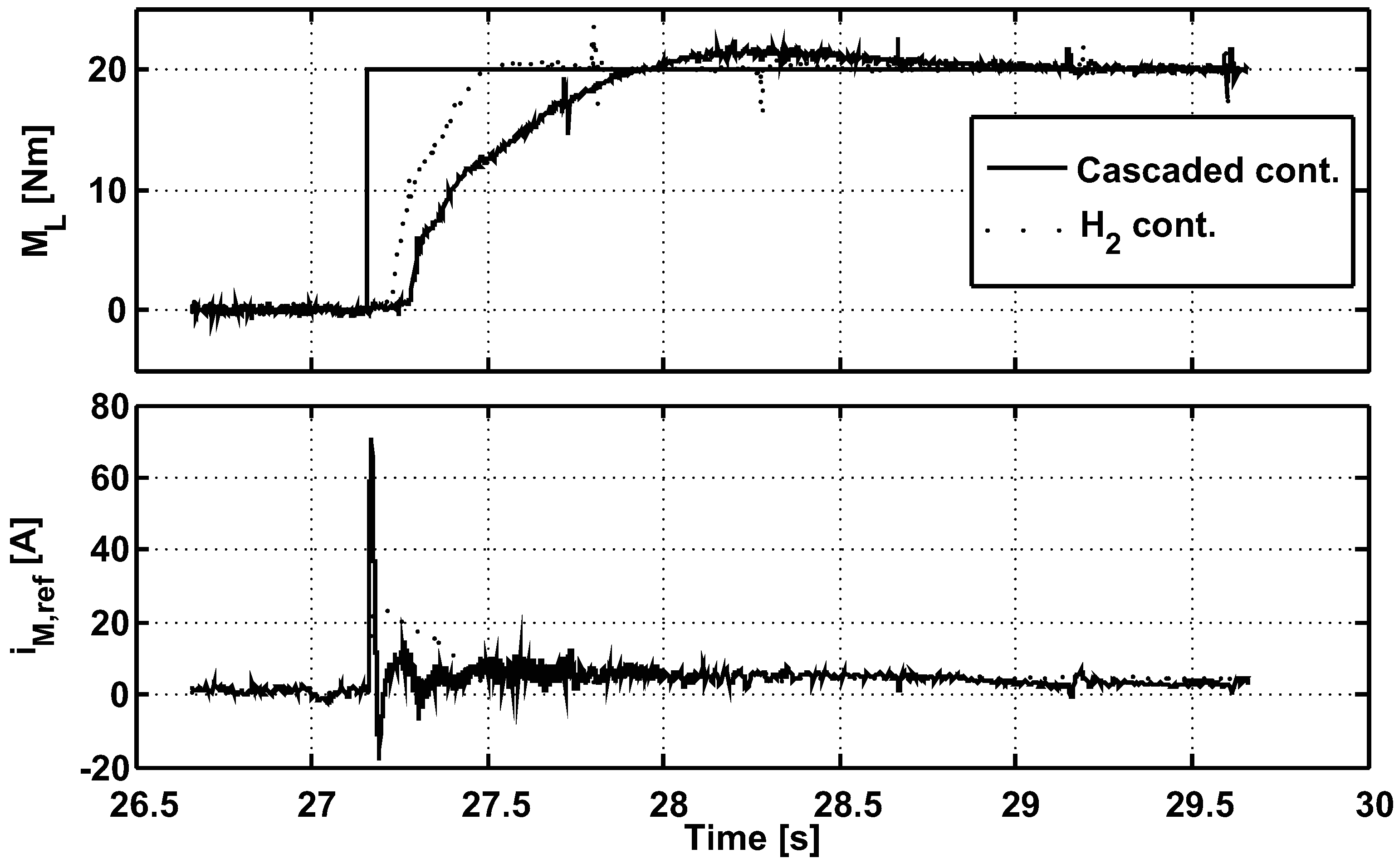
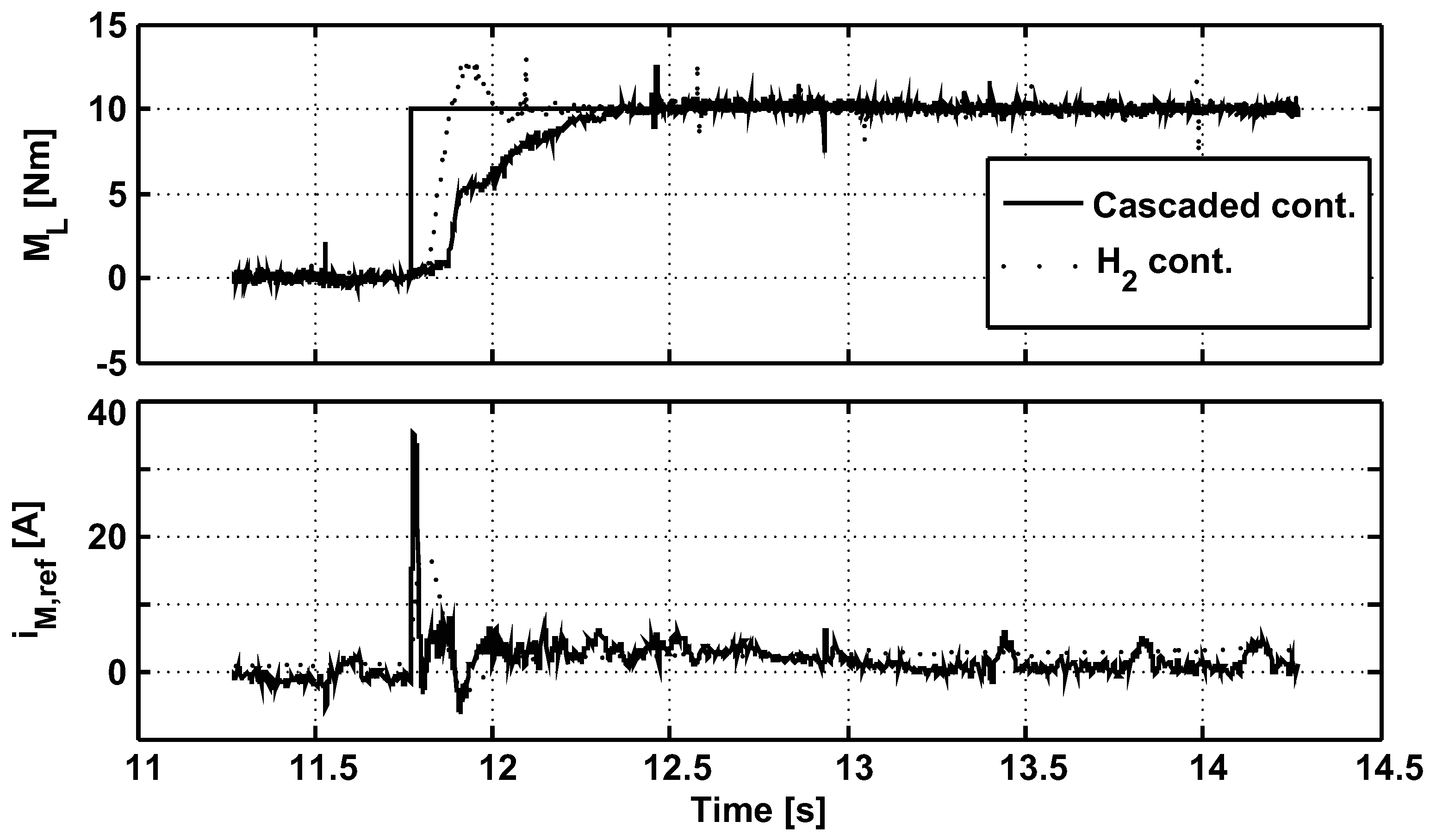
4.2. Experimental Study




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
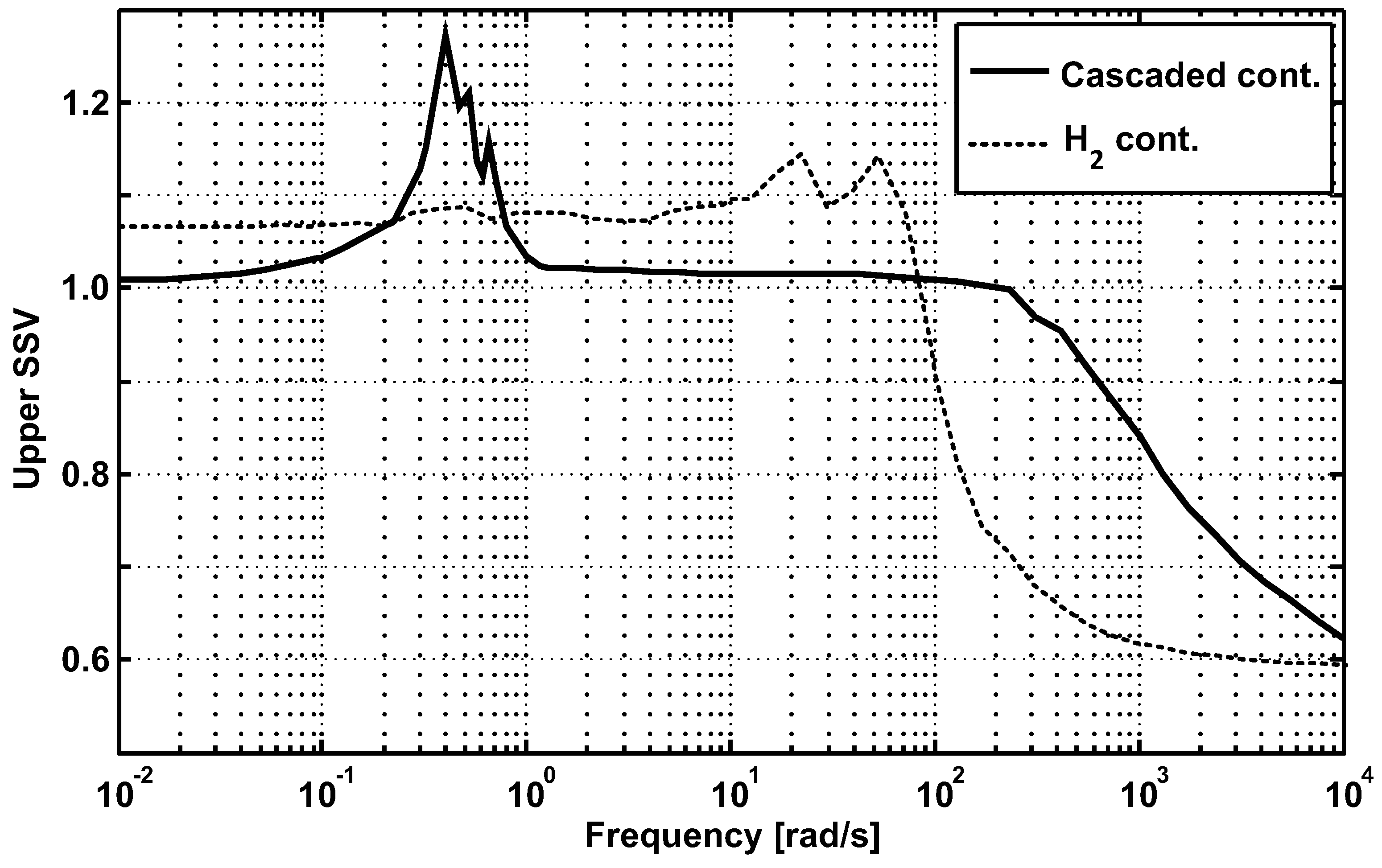
| Criterion | Classical Controller | -Controller |
|---|---|---|
| 1.27 | 1.14 | |
| ST (ms) (SIM) | 640 | 270 |
| OS (%) (SIM) | 9.7 | 1.1 |
| IAE (-) (SIM) | 9.4 | 3.7 |
| ISAE (-) (SIM) | 249.7 | 115.1 |
| ST (ms) (EXP) | 440 | 220 |
| OS (%) (EXP) | - | 25 |
| IAE (-) (EXP) | 0.887 | 0.49 |
| ISAE (-) (EXP) | 4.81 | 2.36 |
| 0.73 | 0.024 |
5. Conclusions and Discussion
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix
| Parameter | Value | Unit | Parameter | Value | Unit |
|---|---|---|---|---|---|
| 0.0343 | Ω | H | |||
| 0.0707 | V/rad/s | 10.0 | A | ||
| Nms | |||||
| 1/160 | - | 200.0 | |||
| - | 12.522 | - | |||
| 12.7908 | - | - | |||
| - | - | ||||
| −100 | - | γ | 12.522 | - | |
| 171.9 | - | 107.48 | - | ||
| Nm |
| Parameter | Value | Unit | Parameter | Value | Unit |
|---|---|---|---|---|---|
| [0.1 0.3 ... 0.7] | - | [5.0 10.0 ... 60.0] | - | ||
| R | 2.0 | - | [1.43 22.79 1.0] | - | |
| 4.0 | - | 0.2 | - | ||
| 0.028 | - | 4.0 | - | ||
| [50 ... 300] | Nm/rad | [2.0 ... 10] |
| Parameter | Value | Unit | Parameter | Value | Unit |
|---|---|---|---|---|---|
| b | 1 | - | a | - | |
| rad/s | 0.1 | - | |||
| 10.0 | - | 5.0 | rad/s | ||
| 1.5 | rad/s | 1,000.0 | - | ||
| 0.01 | - | 0.001 | s | ||
| 0.0955 | s | 0.0111 | s |
References
- Pohl, M.; Werner, C.; Holzgraefe, M.; Kroczek, G.; Wingendorf, I.; Holig, G.; Koch, R.; Hesse, S. Repetitive Locomotor Training and Physiotherapy Improve Walking and Basic Activities of Daily Living After Stroke: A Single-Blind, Randomized Multicentre Trial (DEutsche GAngtrainerStudie, DEGAS). Clin. Rehabil. 2007, 21, 17–27. [Google Scholar] [CrossRef] [PubMed]
- Hogan, N. Impedance Control: An Approach to Manipulation: Part I-III. J. Dyn. Syst. Meas. Control 1985, 107, 1–24. [Google Scholar] [CrossRef]
- Pratt, G.; Williamson, M. Series Elastic Actuators. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Pittsburgh, PA, USA, 5–9 August 1995; pp. 399–406.
- Pratt, G.A.; Williamson, M.M.; Dillworth, P.; Pratt, J.; Wright, A. Stiffness Isn’t Everything. In Proceedings of the 4th International Symposium (Experimental Robotics IV), Stanford, CA, USA, 30 June–2 July 1995; Springer: Berlin/Heidelberg, Germany, 1997; pp. 253–262. [Google Scholar]
- Zinn, M.; Khatib, O.; Roth, B.; Salisbury, J. Actuation Methods for Human-Centered Robotics and Associated Control Challenges. In Control Problems in Robotics; Springer: Berlin/Heidelberg, Germany, 2003; Volume 4, pp. 105–119. [Google Scholar]
- Vanderborght, B.; Verrelst, B.; van Ham, R.; van Damme, M.; Lefeber, D.; Duran, B.M.Y.; Beyl, P. Exploiting Natural Dynamics to Reduce Energy Consumption by Controlling the Compliance of Soft Actuators. Int. J. Robot. Res. 2006, 24, 343–358. [Google Scholar] [CrossRef]
- Grebenstein, M.; Albu-Schaffer, A.; Bahls, T.; Chalon, M.; Eiberger, O.; Friedl, W.; Gruber, R.; Haddadin, S.; Hagn, U.; Haslinger, R.; et al. The DLR Hand Arm System. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 3175–3182.
- Schuitema, E.; Hobbelen, D.; Jonker, P.; Wisse, M.; Karssen, J. Using a Controller Based on Reinforcement Learning for a Passive Dynamic Walking Robot. In Proceedings of the IEEE/RAS International Conference on Humanoid Robots, Tsukuba, Japan, 5–7 December 2005; pp. 232–237.
- Collins, S.; Ruina, A. A Bipedal Walking Robot with Efficient and Human-Like Gait. In Proceedings of the IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 1983–1988.
- Diftler, M.; Mehling, J.; Abdallah, M.; Radford, N.; Bridgwater, L.; Sanders, A.M.; Askew, R.S.; Linn, D.; Yamokoski, J.; Permenter, F.; et al. Robonaut 2—The First Humanoid Robot in Space. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2178–2183.
- Veneman, J.; Ekkelenkamp, R.; Kruidhof, R.; van der Helm, F.; van der Kooij, H. A Series Elastic- and Bowden-Cable-Based Actuation System for Use as Torque Actuator in Exoskeleton-Type Robots. Int. J. Robot. Res. 2006, 25, 261–281. [Google Scholar] [CrossRef]
- Karavas, N.; Tsagarakis, N.; Caldwell, D. Design, Modeling and Control of a Series Elastic Actuator for an Assistive Knee Exoskeleton. In Proceedings of the 4th IEEE/RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Roma, Italy, 24–27 June 2012; pp. 1813–1819.
- Vanderborght, B.; van Ham, R.; Lefeber, D.; Sugar, T.; Hollander, K. Comparison of Mechanical Design and Energy Consumption of Adaptable, Passive-compliant Actuators. Int. J. Robot. Res. 2009, 28, 90–102. [Google Scholar] [CrossRef]
- Wolf, S.; Eiberger, O.; Hirzinger, G. The DLR FSJ: Energy Based Design of a Variable Stiffness Joint. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 5082–5089.
- Radulescu, A.; Howard, M.; Braun, D.; Vijayakumar, S. Exploiting variable physical damping in rapid movement tasks. In Proceedings of the 2012 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), KaoHsiung, Taiwan, 11–14 July 2012; pp. 141–148.
- Laffranchi, M.; Tsagarakis, N.; Caldwell, D. CompAct Arm: A Compliant Manipulator with Intrinsic Variable Physical Damping. In Proceedings of Robotics: Science and Systems, Sydney, Australia, 9–13 July 2012.
- Robinson, D.; Pratt, J.; Paluska, D.; Pratt., G. Series Elastic Actuator Development for a Biomimetic Walking Robot. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, Singapore, 14–17 July 1999; pp. 561–568.
- Goldsmith, P.; Francis, B.; Goldenberg, A. Stability of Hybrid Position/Force Control Applied to Manipulators with Flexible Joints. Int. J. Robot. Res. 1999, 14, 146–160. [Google Scholar]
- Vallery, H.; Ekkelenkamp, R.; van der Kooij, H.; Buss, M. Passive and Accurate Torque Control of Series Elastic Actuators. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 3534–3538.
- Buerger, S.; Hogan, N. Complementary Stability and Loop Shaping for Improved Human ndash; Robot Interaction. IEEE Trans. Robot. 2007, 23, 232–244. [Google Scholar] [CrossRef]
- Lozano-Leal, R.; Joshi, S. On the Design of Dissipative LQG-type Controller. In Proceedings of the IEEE International Conference on Decision and Control, Tampa, FL, USA, 16–18 December 1988; pp. 1645–1646.
- Haddad, W.; Bernstein, D. Dissipative Controller Synthesis. IEEE Trans. Autom. Control 1994, 39, 827–831. [Google Scholar] [CrossRef]
- Geromel, J.; Gapski, P. Synthesis of Positive Real Controllers. IEEE Trans. Autom. Control 1997, 42, 988–992. [Google Scholar] [CrossRef]
- Safonov, M.; Limebeer, D. Simplifying the Theory via Loop Shifting. In Proceedings of the IEEE International Conference on Decision and Control, Atlantis, Paradise Island, Bahamas, 14–17 December 2004; pp. 1399–1404.
- Jacobus, M.; Jamshidi, M.; Abdallah, C.; Dorato, P.; Bernstein, D. Design of Strictly Positive Real, Fixed-Order Dynamic Compensators. In Proceedings of the IEEE International Conference on Decision and Control, Honolulu, HI, USA, 5–7 December 1990; Volume 29, pp. 3492–3495.
- Forbes, J. Dual Approaches to Strictly Positive Real Controller Synthesis with a Performance Using Linear Matrix Inequalities. Int. J. Robust Nonlinear Control 2013, 23, 903–918. [Google Scholar] [CrossRef]
- Misgeld, B.; Pomprapa, A.; Leonhardt, S. Robust Control of Series Elastic Actuators Using Positive Real Controller Synthesis. In Proceedings of the IEEE American Control Conference, Portland, 4–6 June 2014. in press.
- Lofberg, J. YALMIP : A Toolbox for Modeling and Optimization in MATLAB. In Proceedings of the IEEE International Symposium on Computer Aided Control Systems Design, Taipei, Taiwan, 2–4 September 2004; pp. 284–289.
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Misgeld, B.J.E.; Gerlach-Hahn, K.; Rüschen, D.; Pomprapa, A.; Leonhardt, S. Control of Adjustable Compliant Actuators. Machines 2014, 2, 134-157. https://doi.org/10.3390/machines2020134
Misgeld BJE, Gerlach-Hahn K, Rüschen D, Pomprapa A, Leonhardt S. Control of Adjustable Compliant Actuators. Machines. 2014; 2(2):134-157. https://doi.org/10.3390/machines2020134
Chicago/Turabian StyleMisgeld, Berno J.E., Kurt Gerlach-Hahn, Daniel Rüschen, Anake Pomprapa, and Steffen Leonhardt. 2014. "Control of Adjustable Compliant Actuators" Machines 2, no. 2: 134-157. https://doi.org/10.3390/machines2020134
APA StyleMisgeld, B. J. E., Gerlach-Hahn, K., Rüschen, D., Pomprapa, A., & Leonhardt, S. (2014). Control of Adjustable Compliant Actuators. Machines, 2(2), 134-157. https://doi.org/10.3390/machines2020134