Characteristics Analysis and Comparison of High-Speed 4/2 and Hybrid 4/4 Poles Switched Reluctance Motor



Abstract
:1. Introduction
2. Concept of Proposed 4/2 and 4/4 SRMs
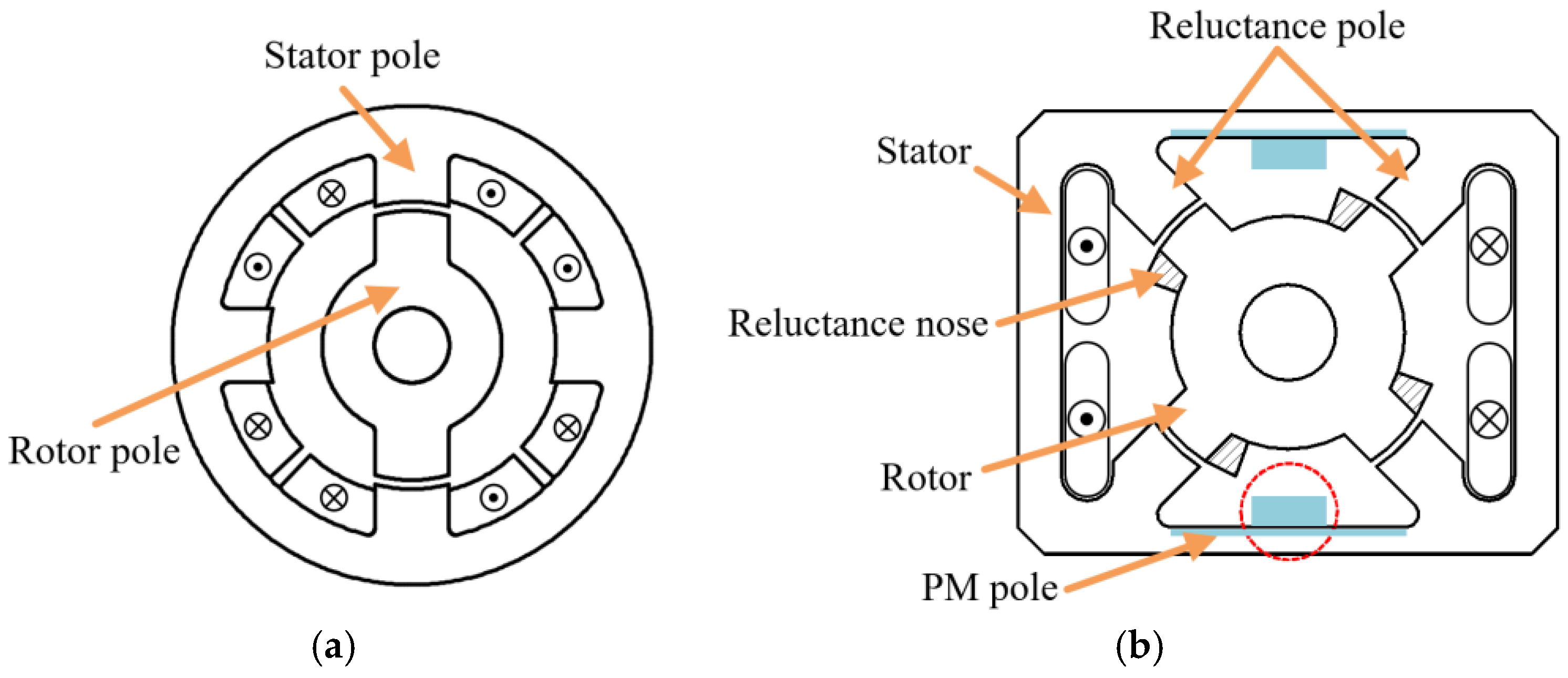
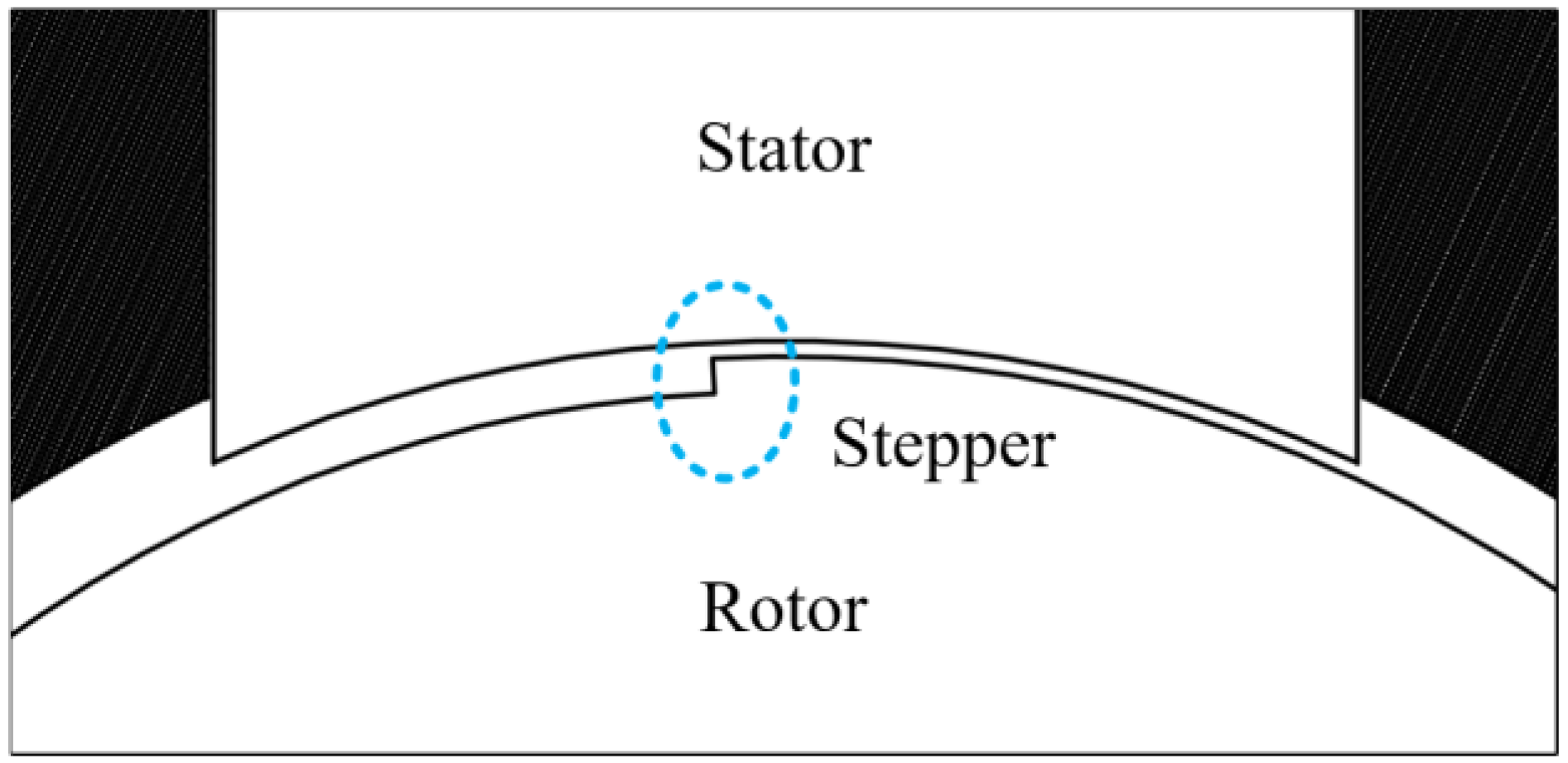
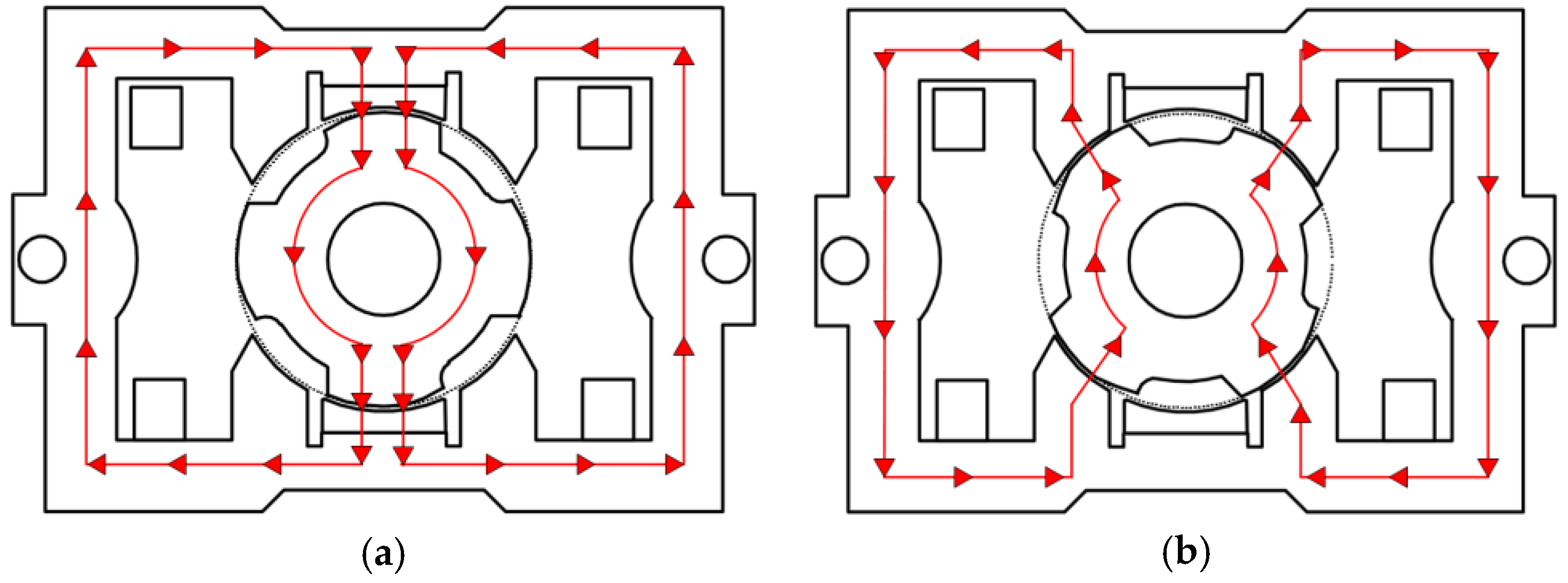
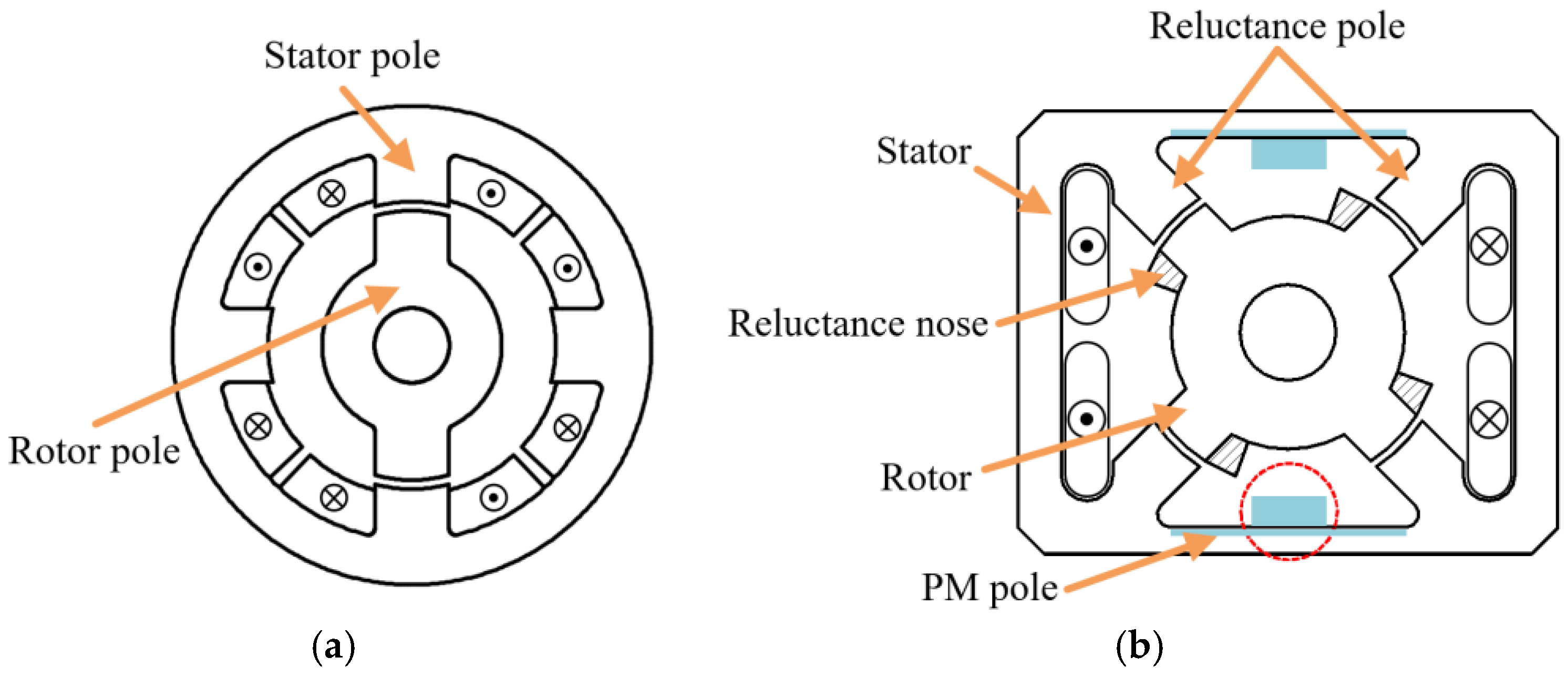
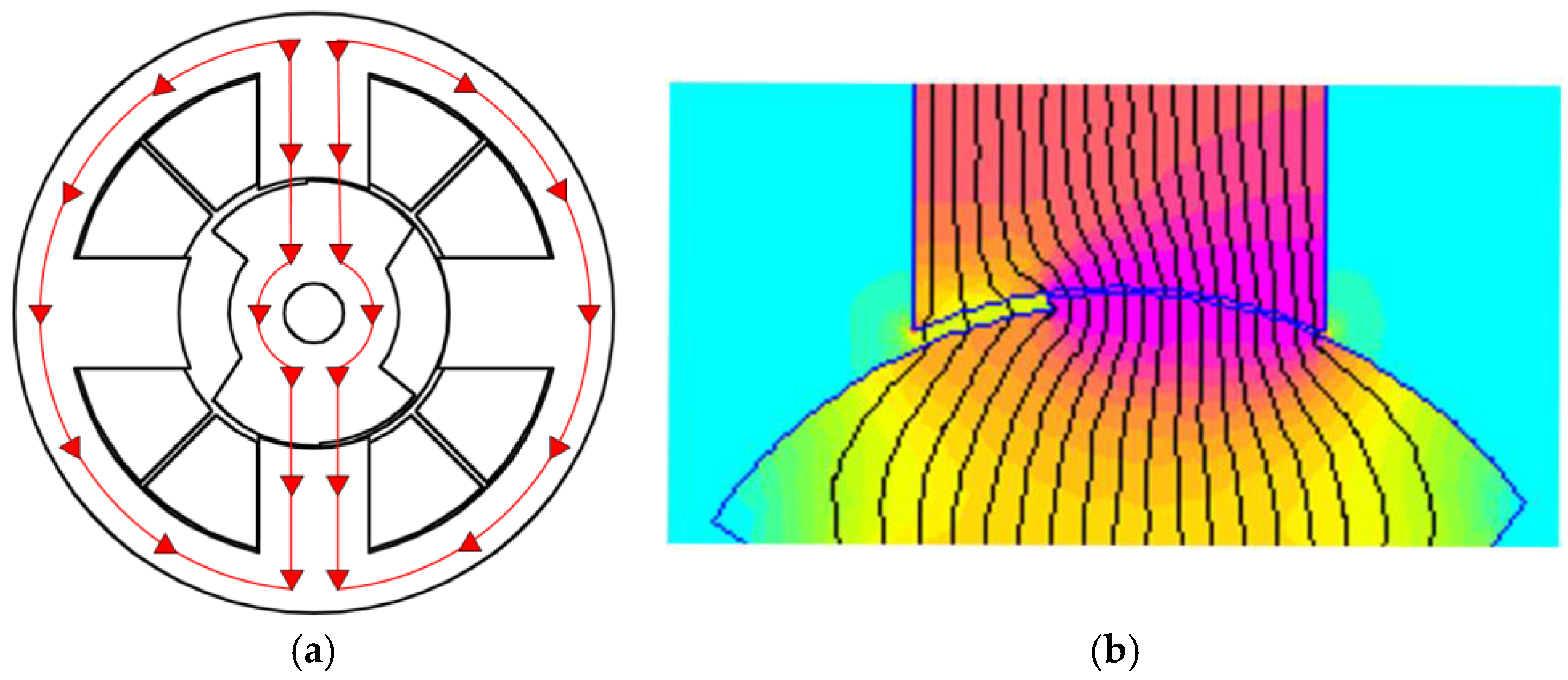
2.1. Proposed 4/2 SRM
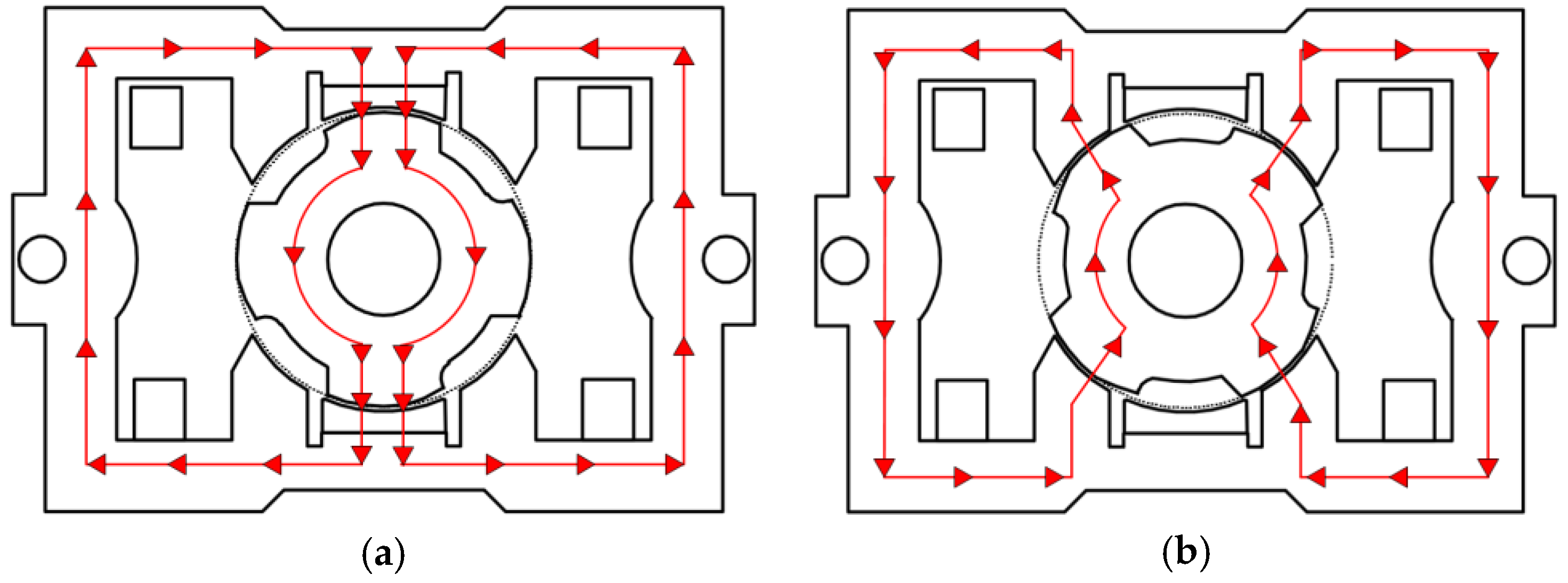
2.2. Proposed Hybrid 4/4 SRM
3. Analysis of 4/2 and 4/4 SRMs
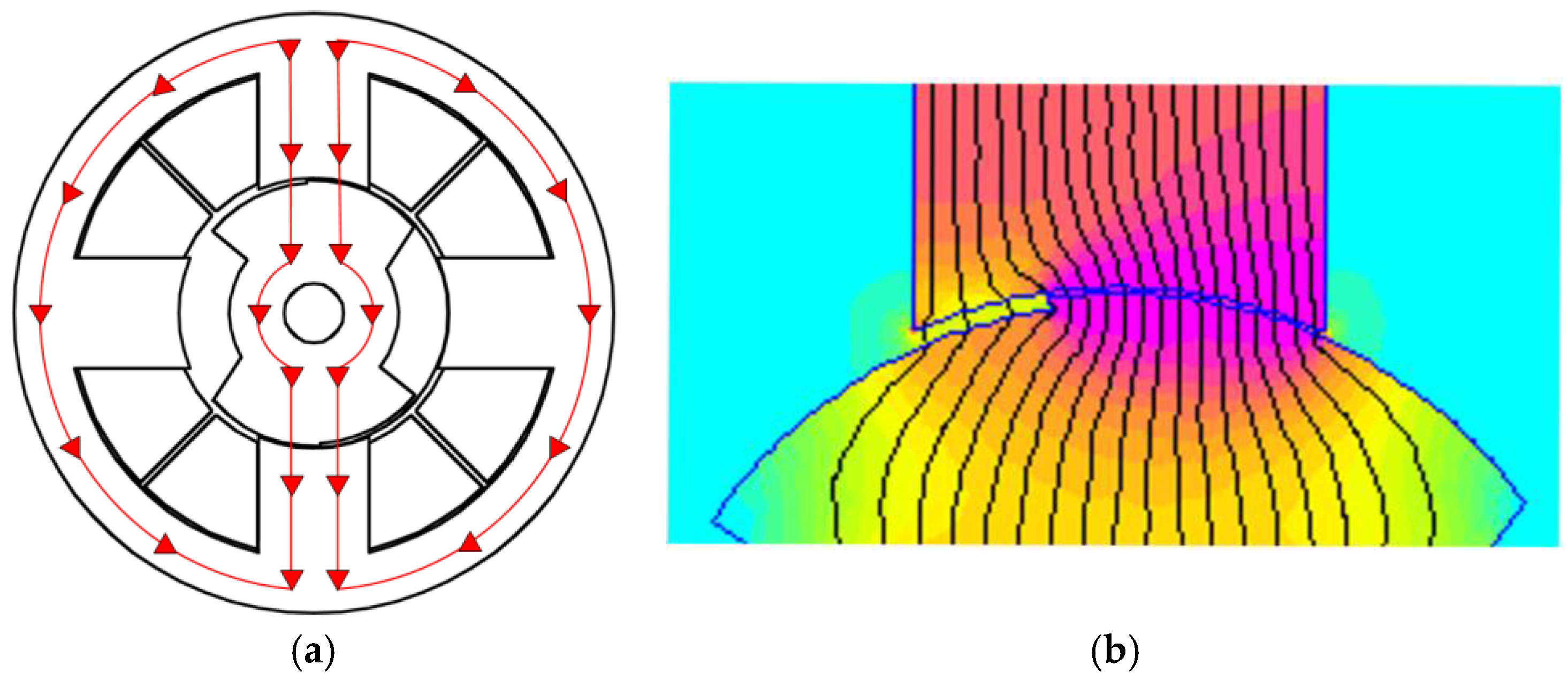
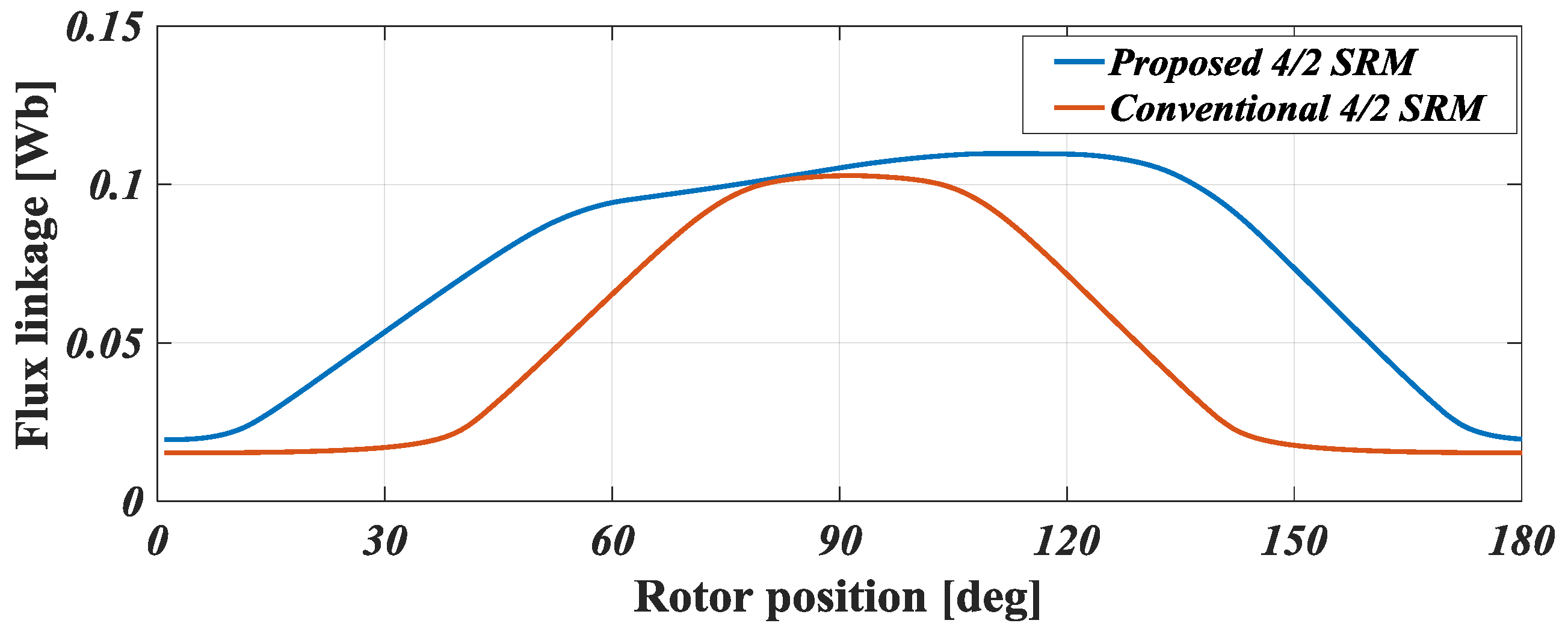
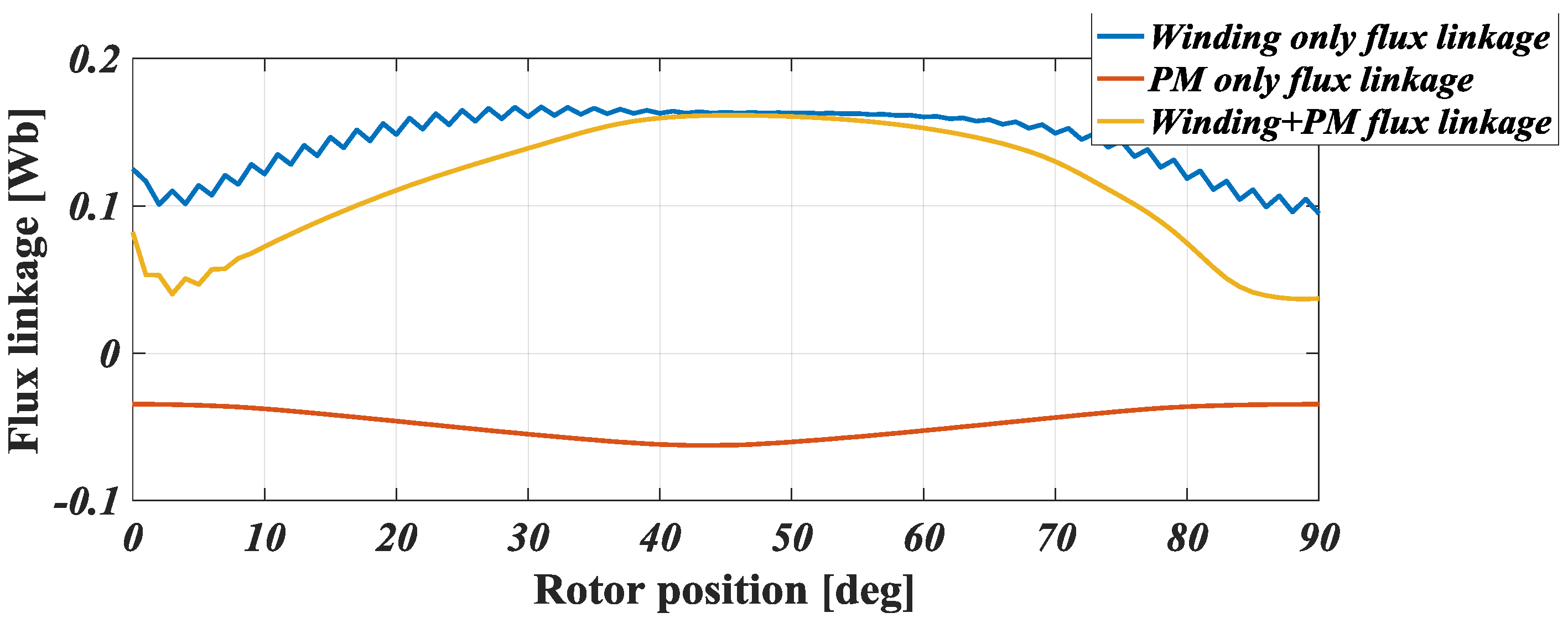
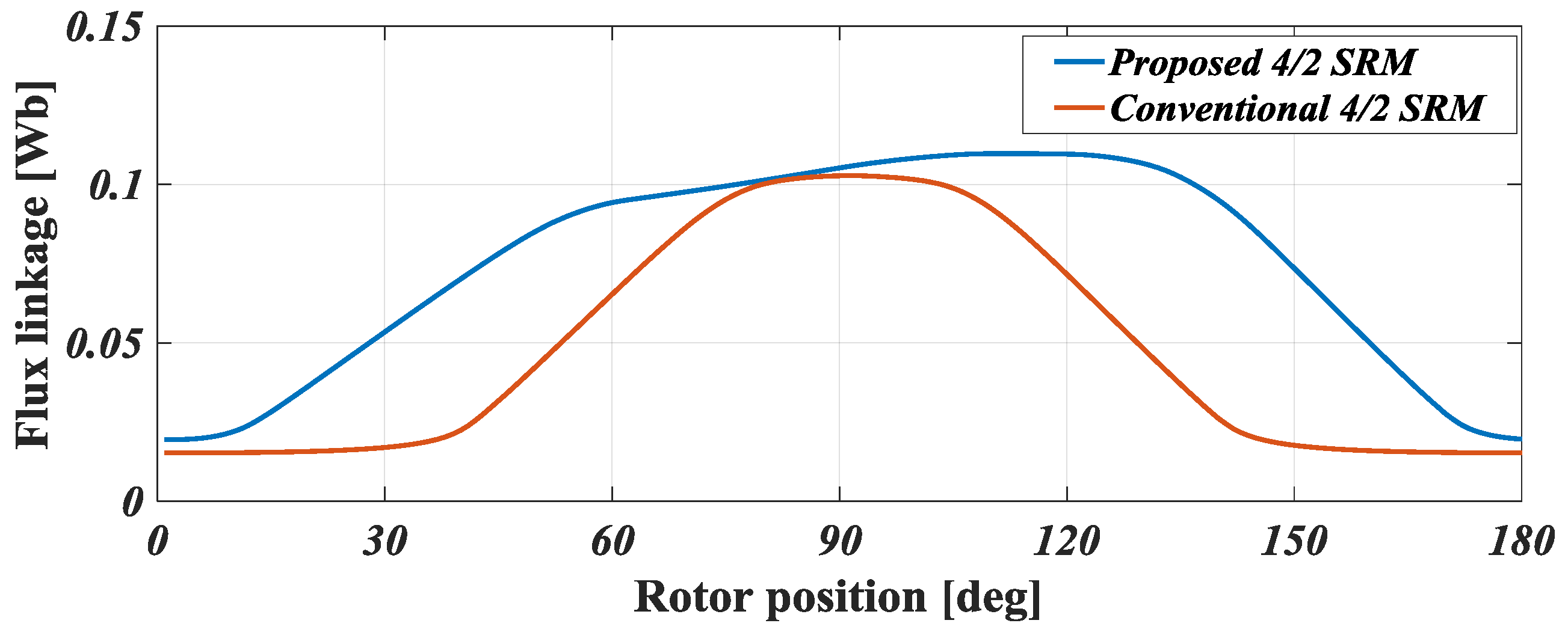
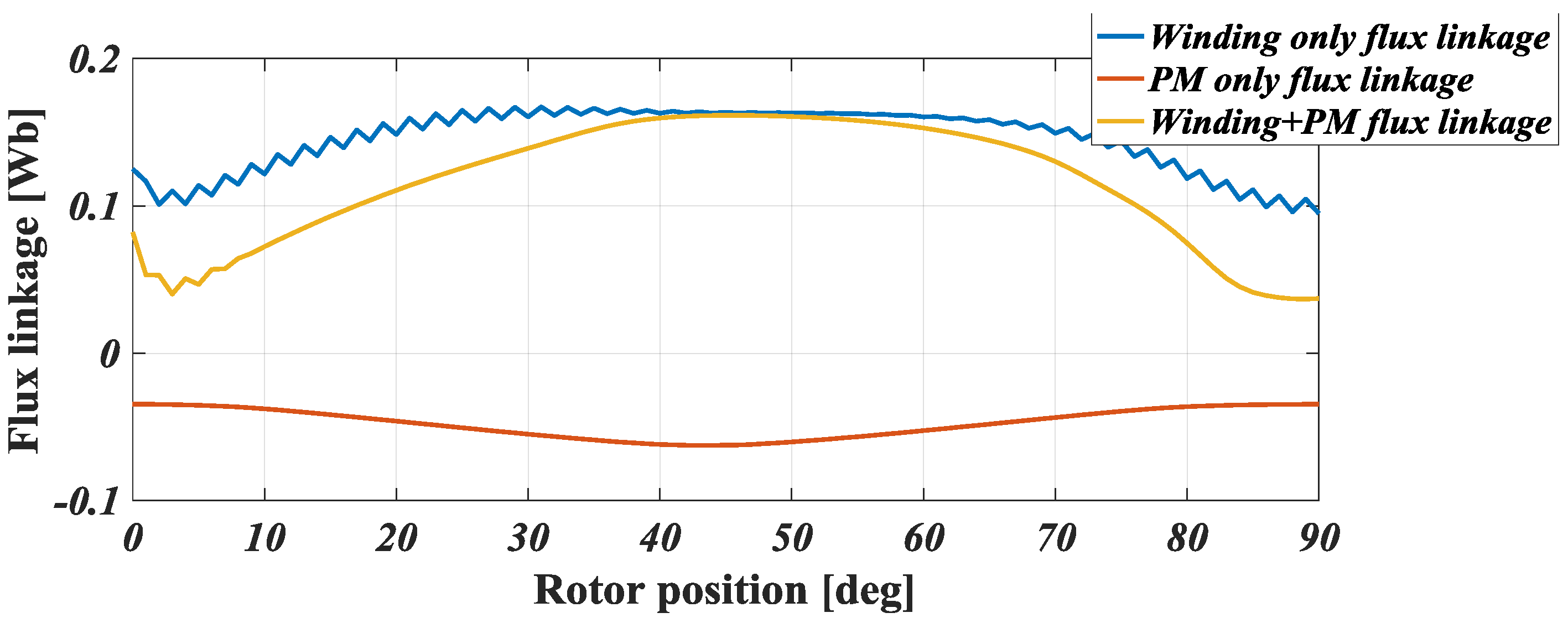
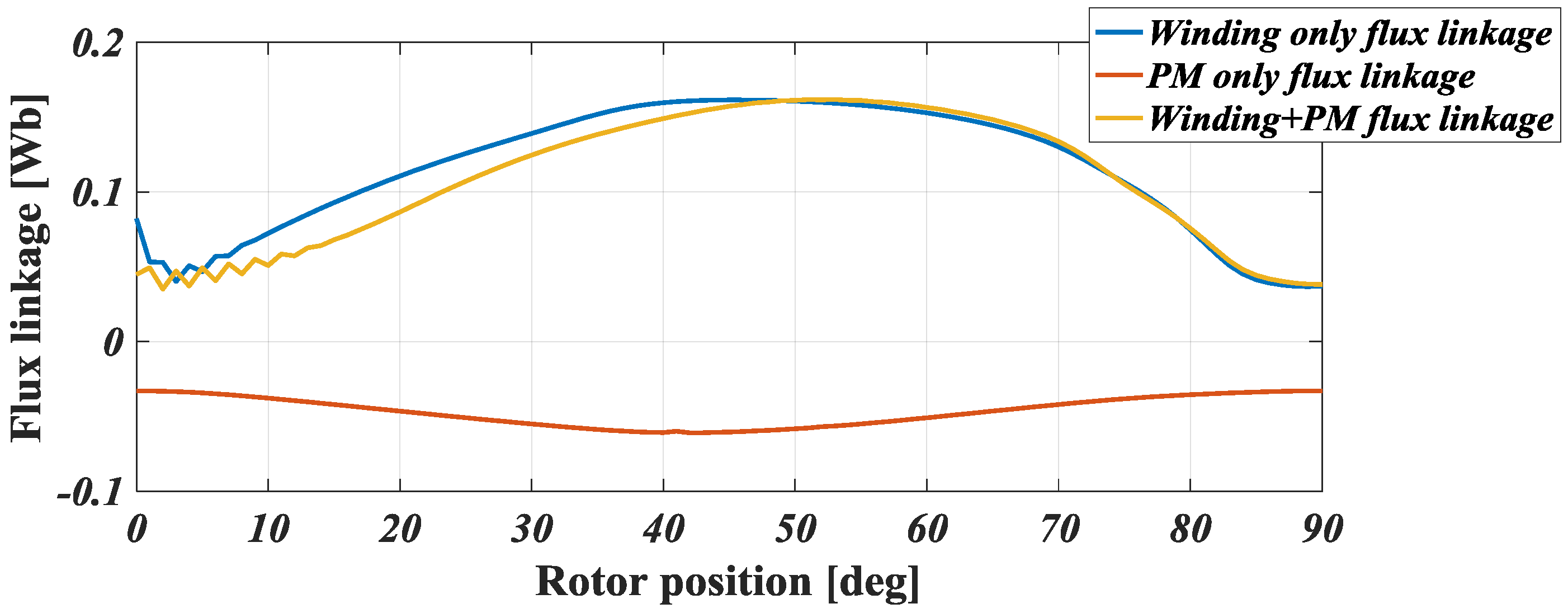
3.1. Flux-Linkage Characteristics
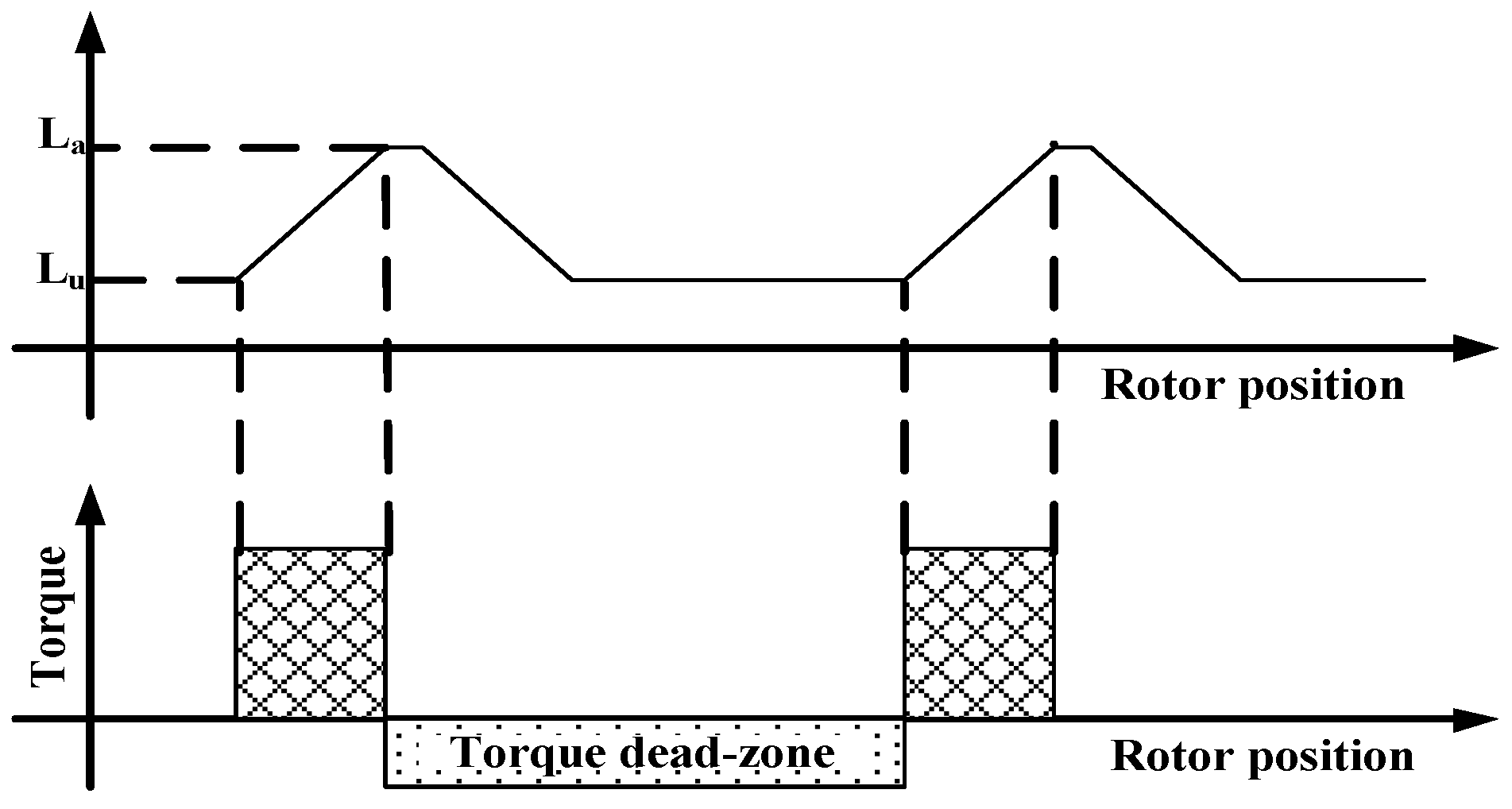
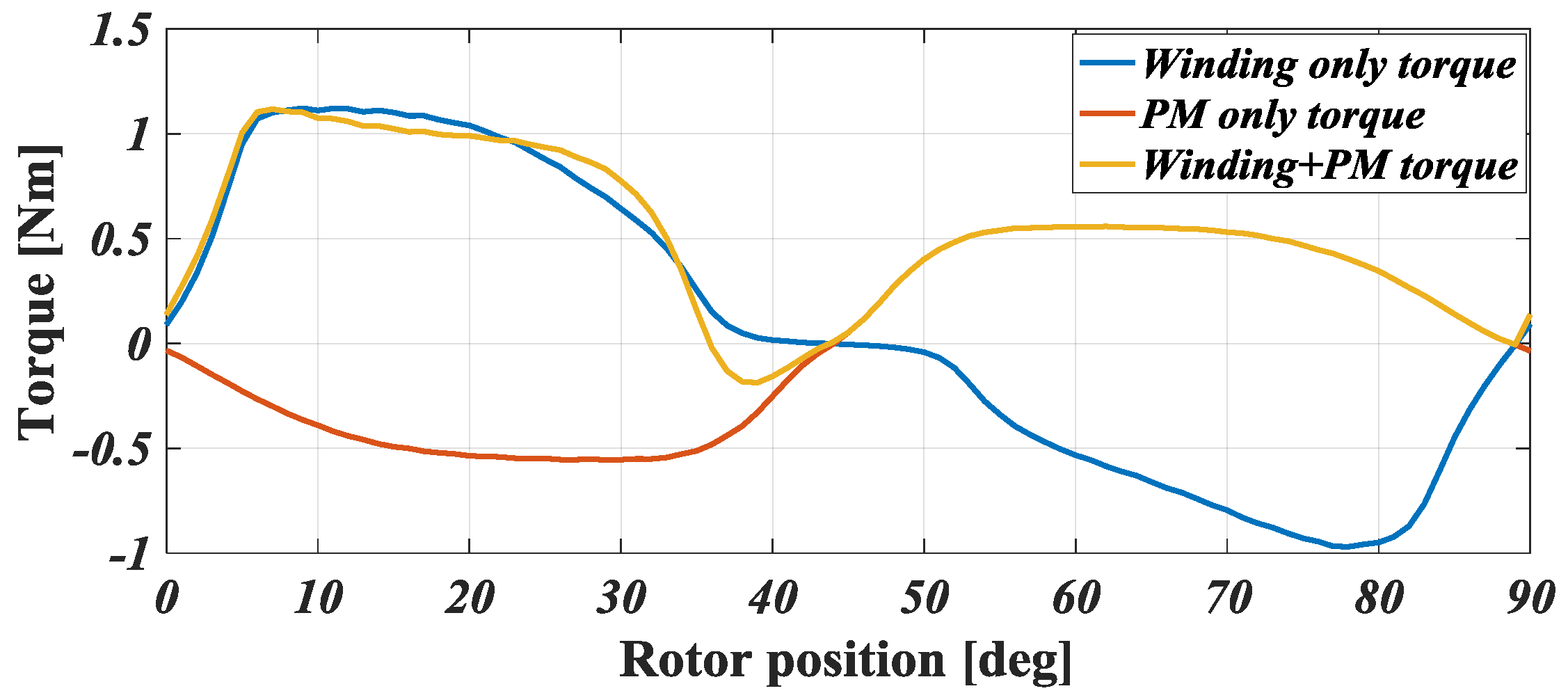
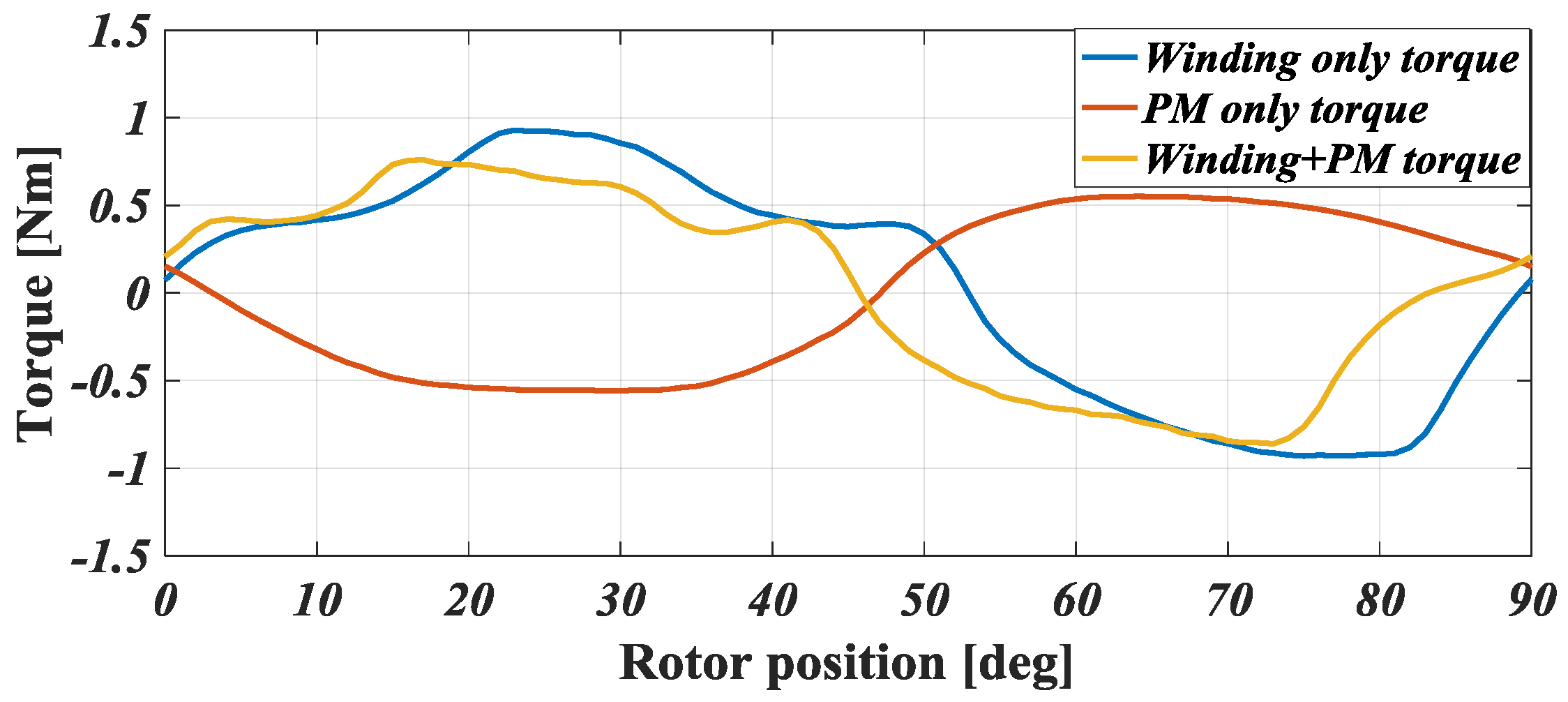
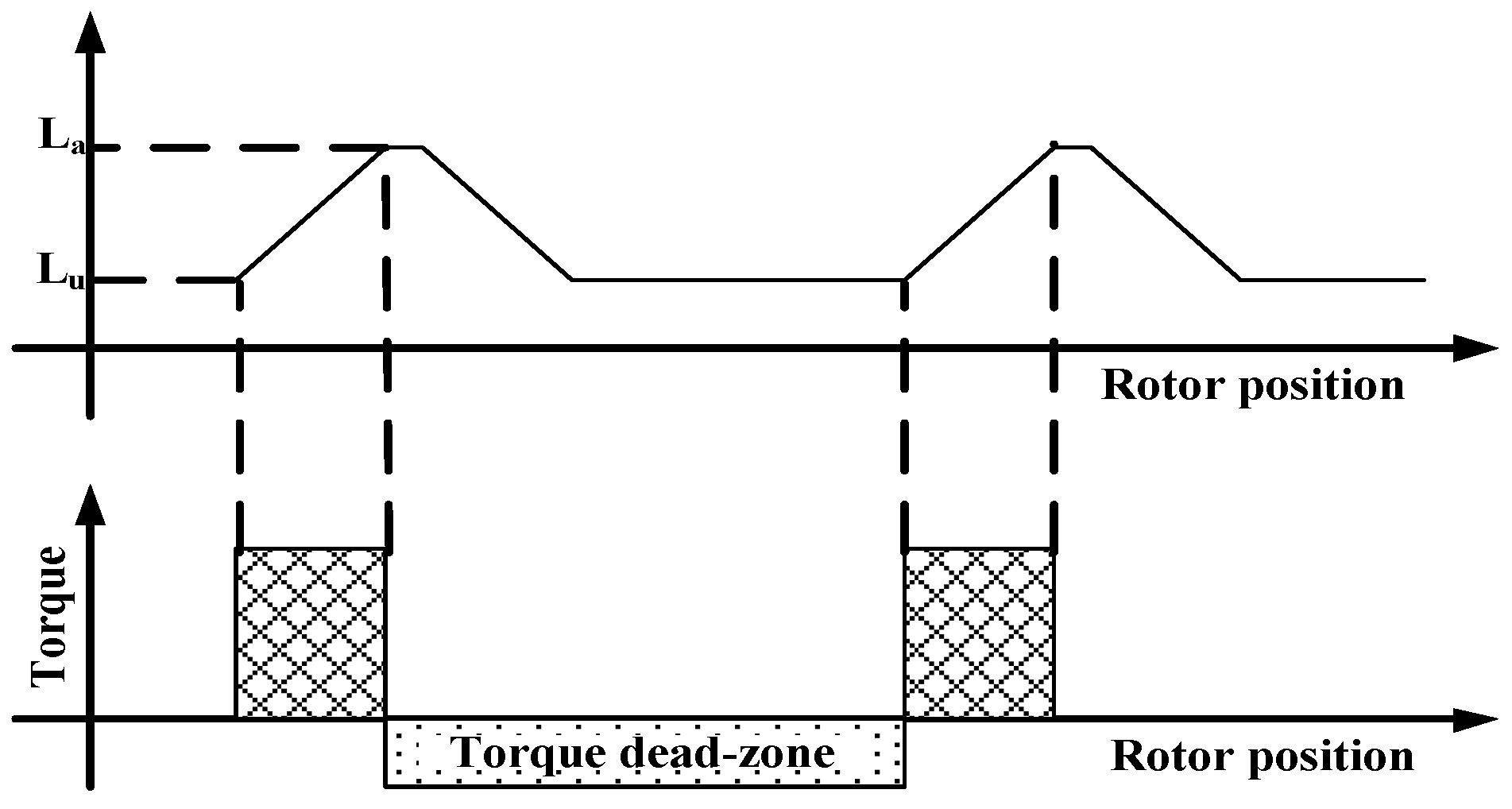
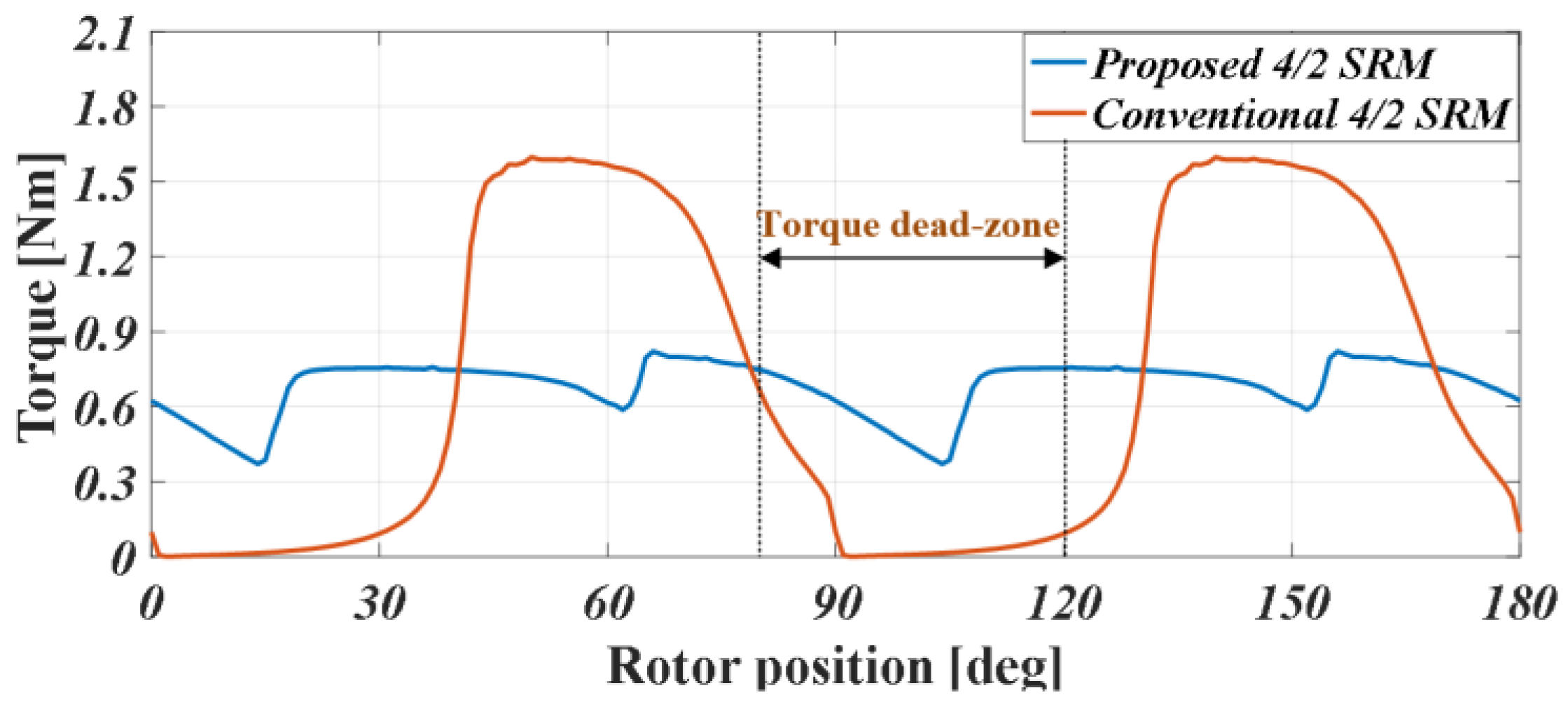
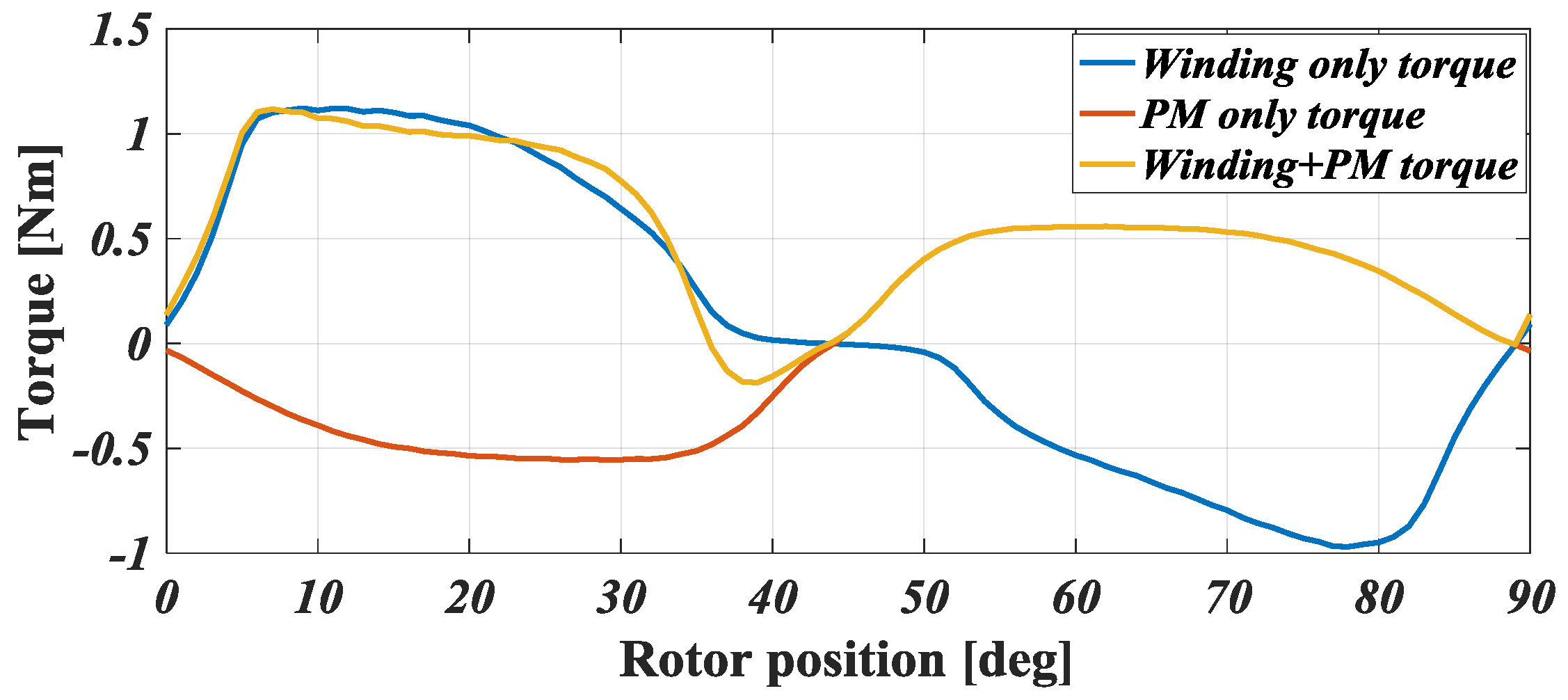
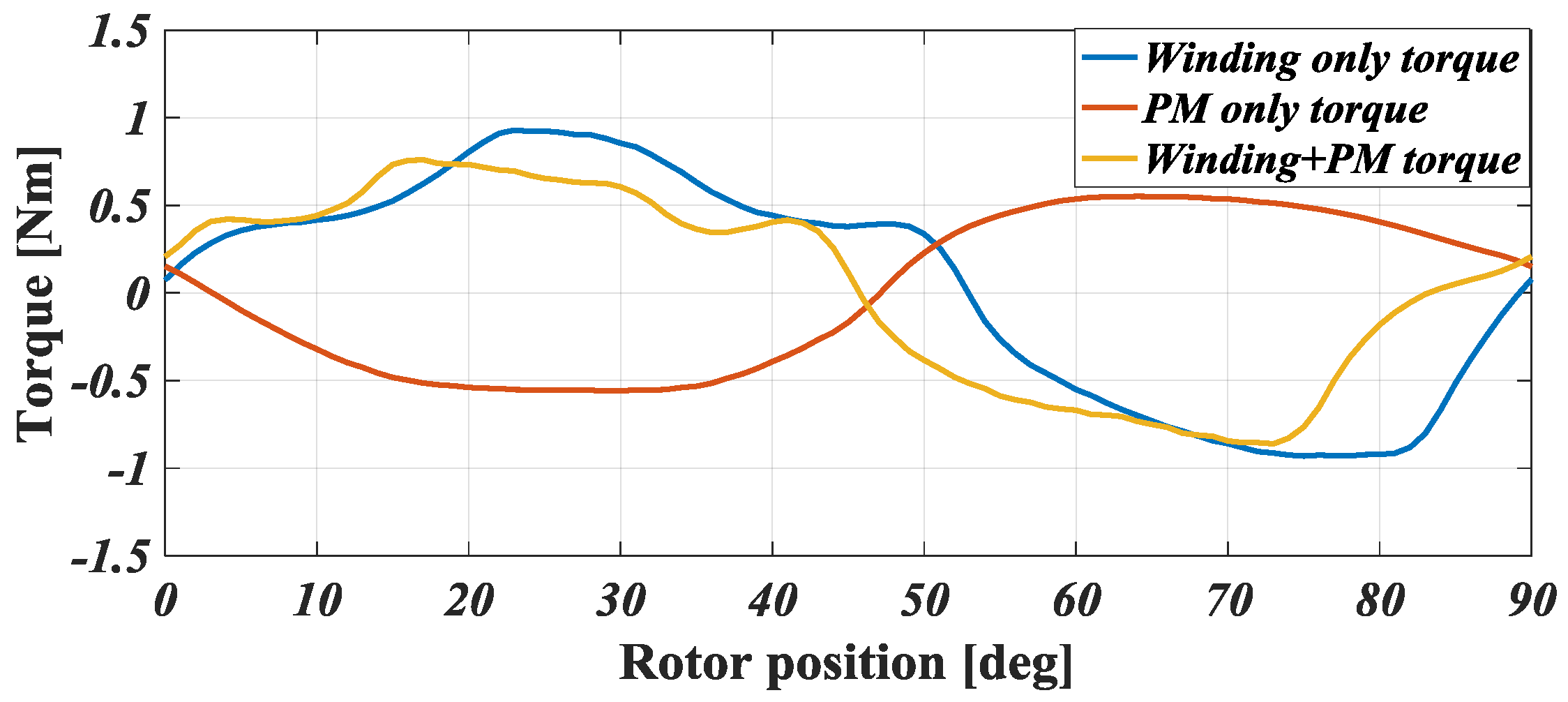
3.2. Torque Characteristics
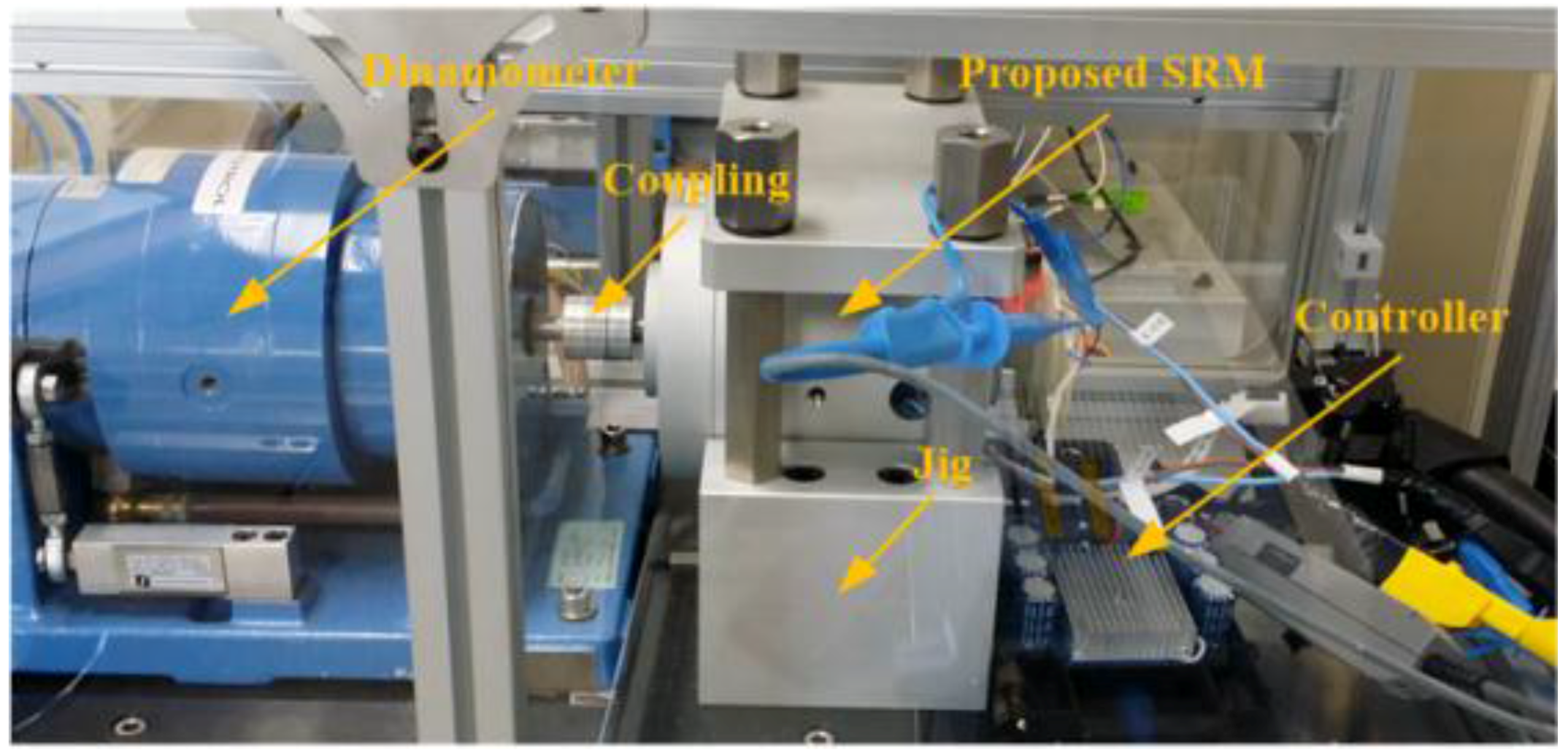
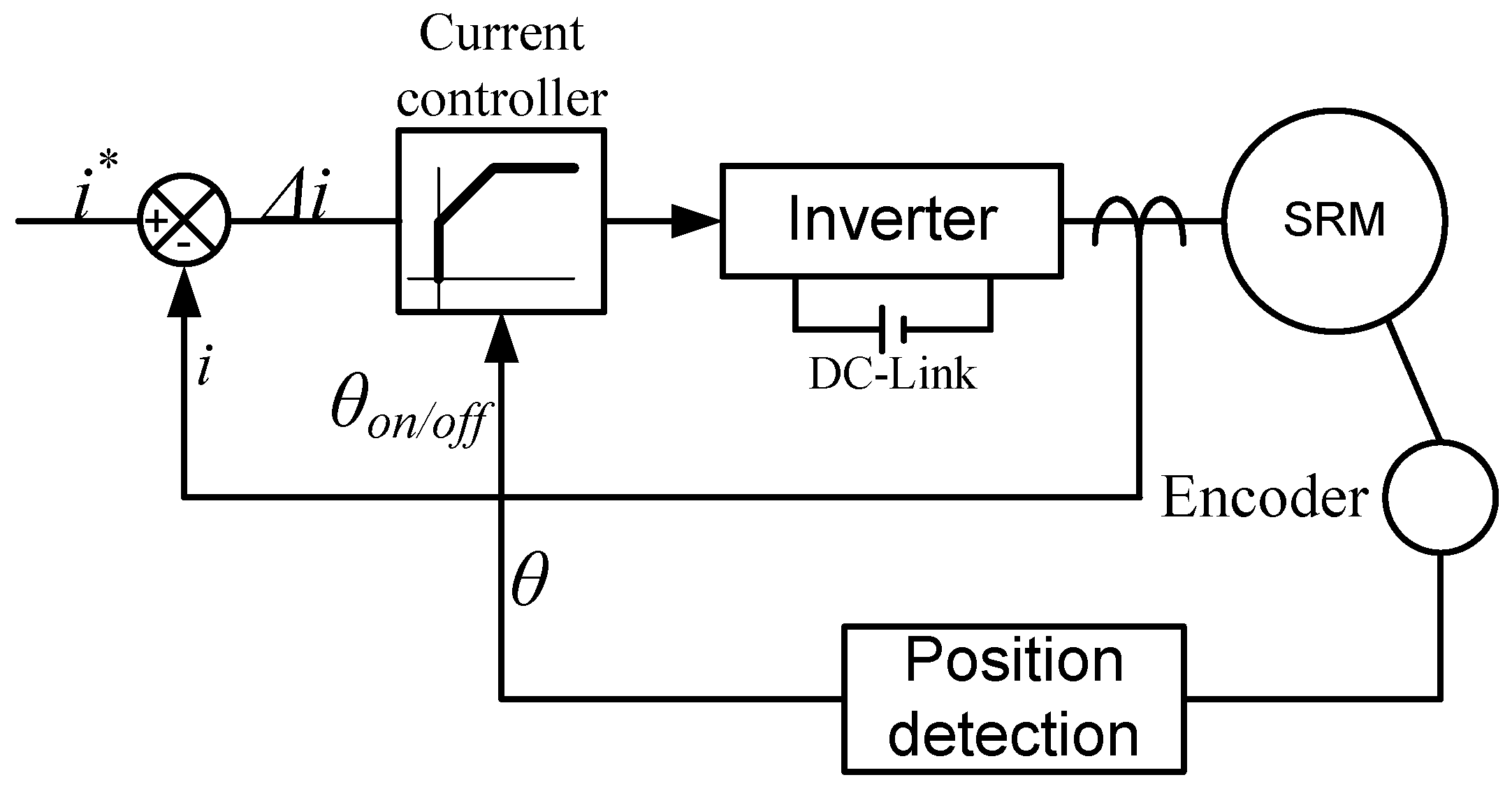
4. Experimental Results
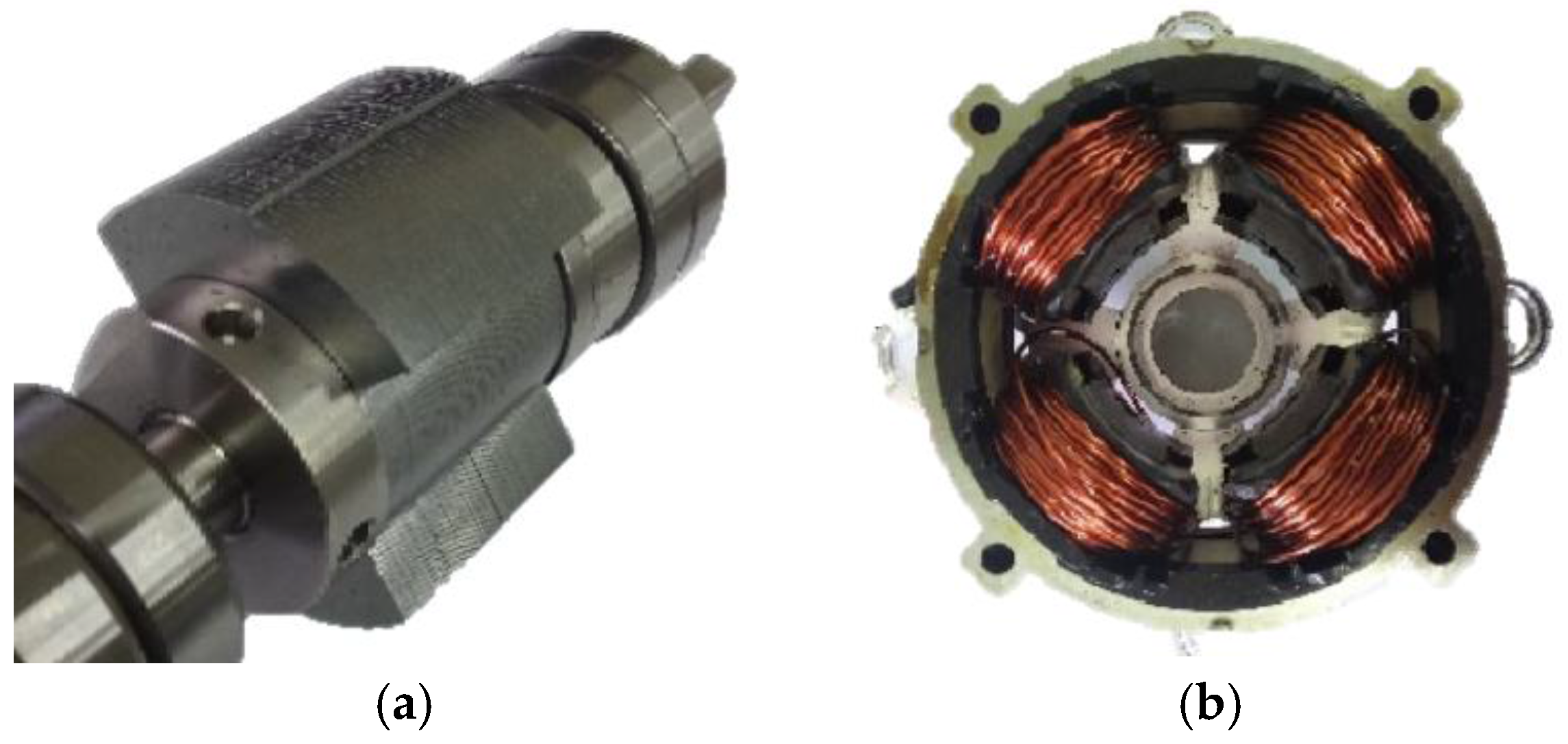
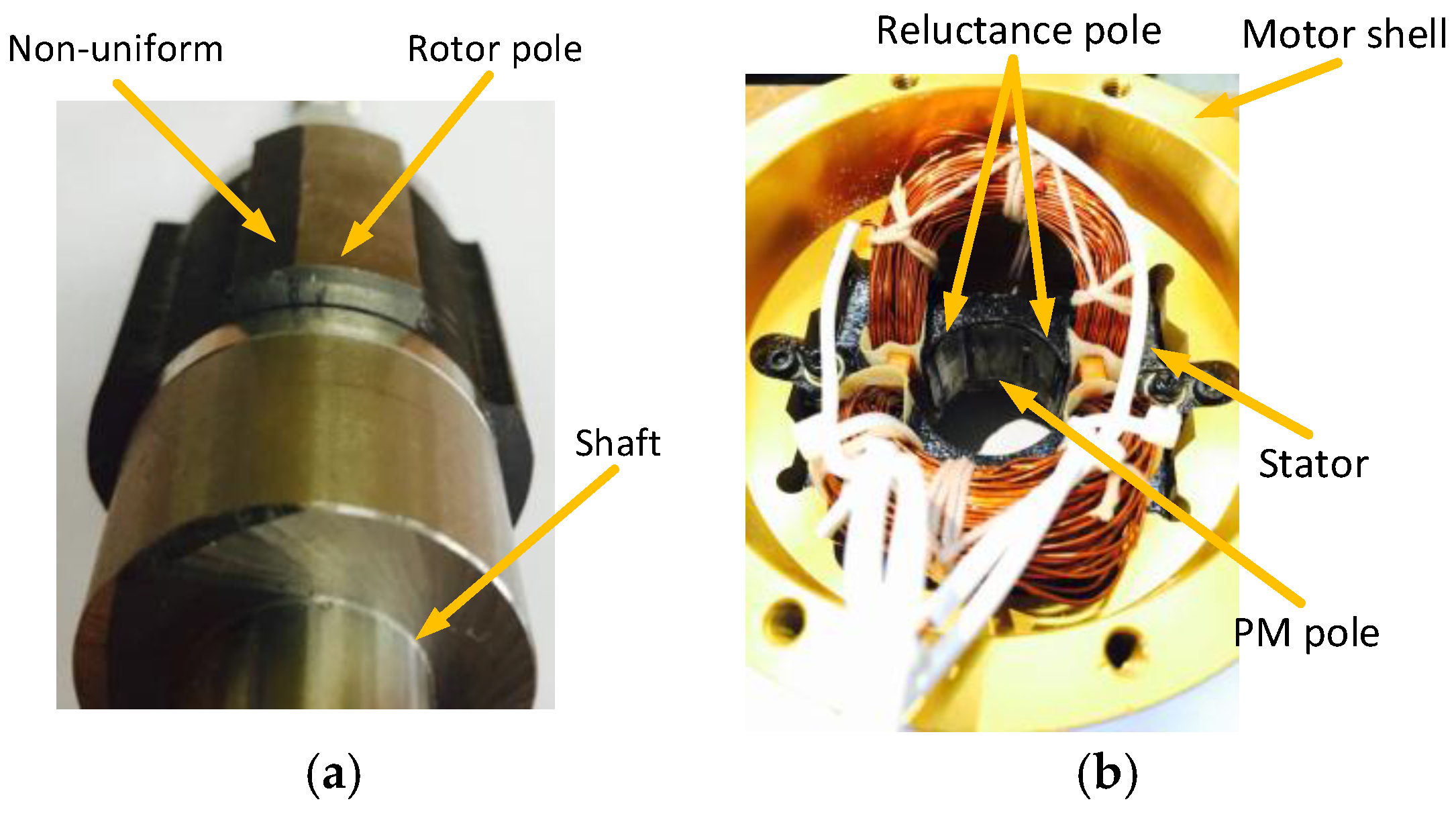
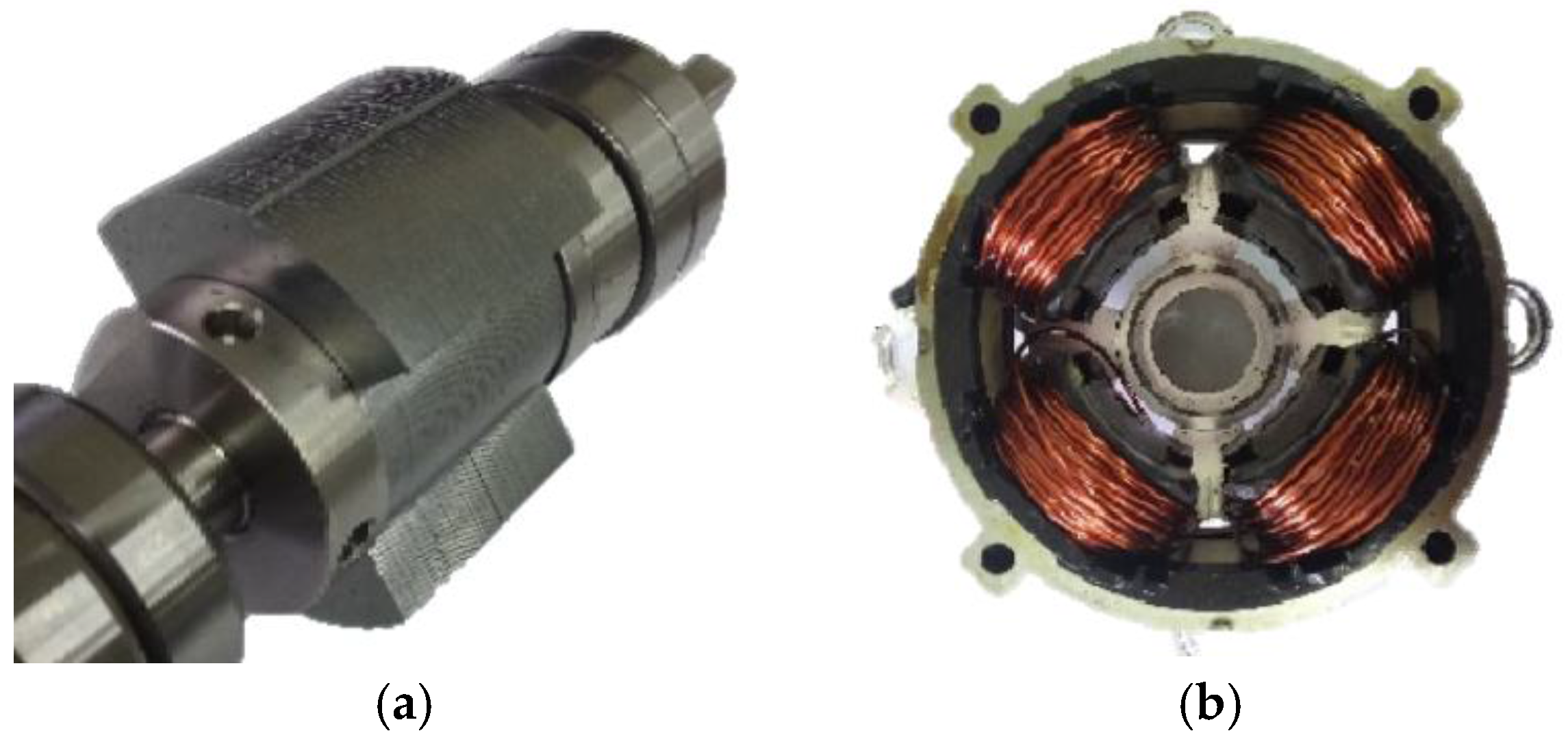
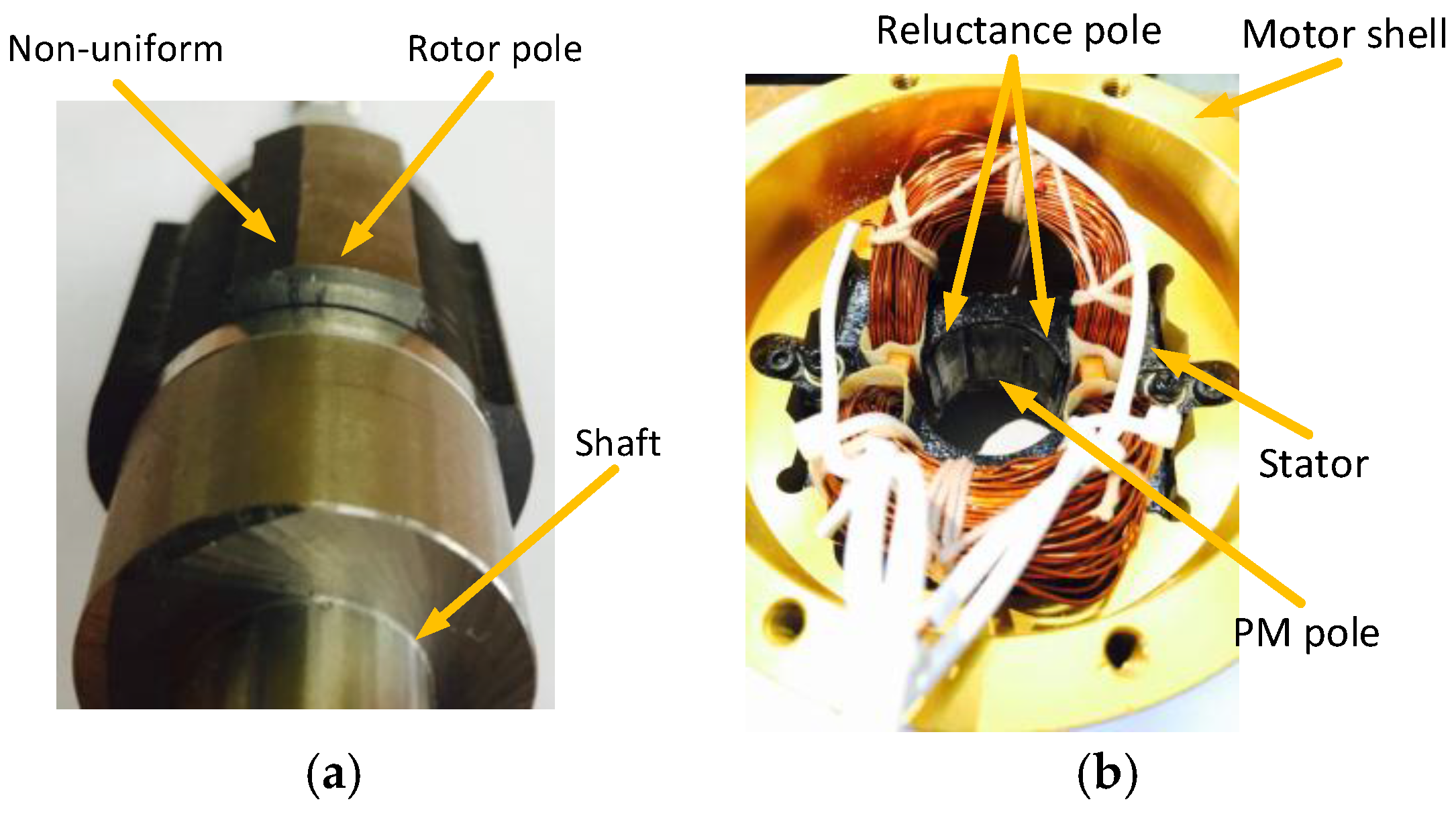
4.1. Prototypes
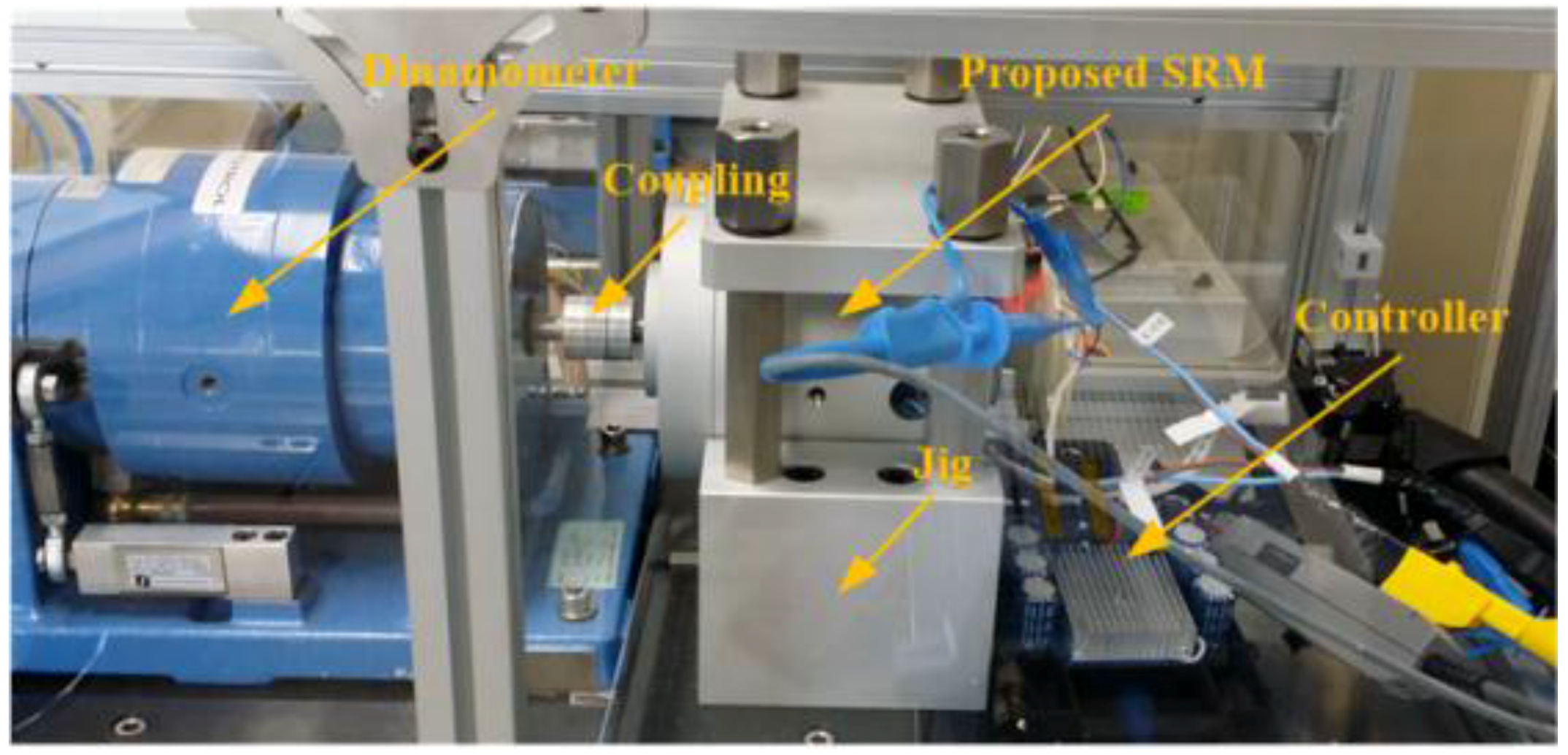
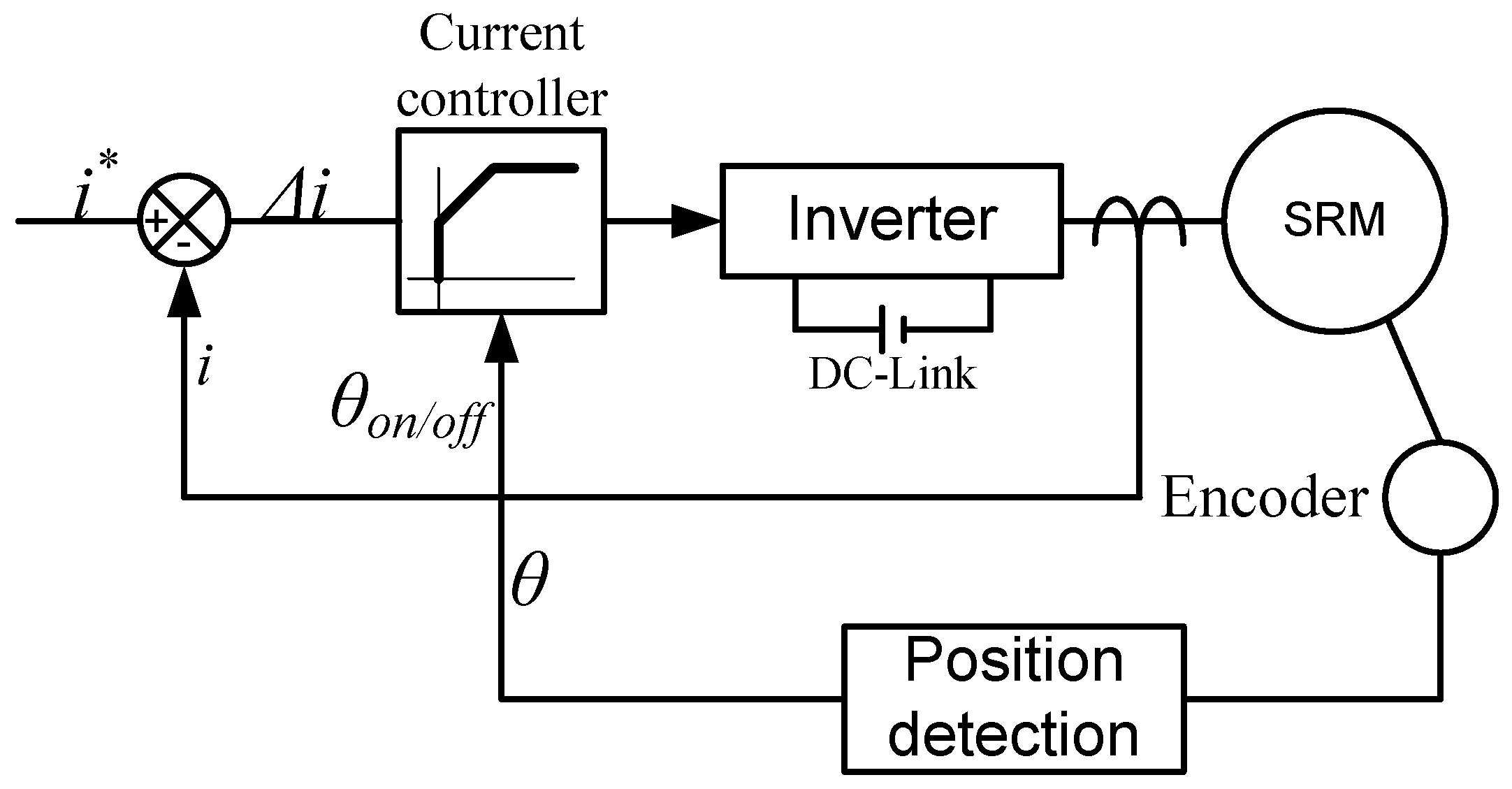
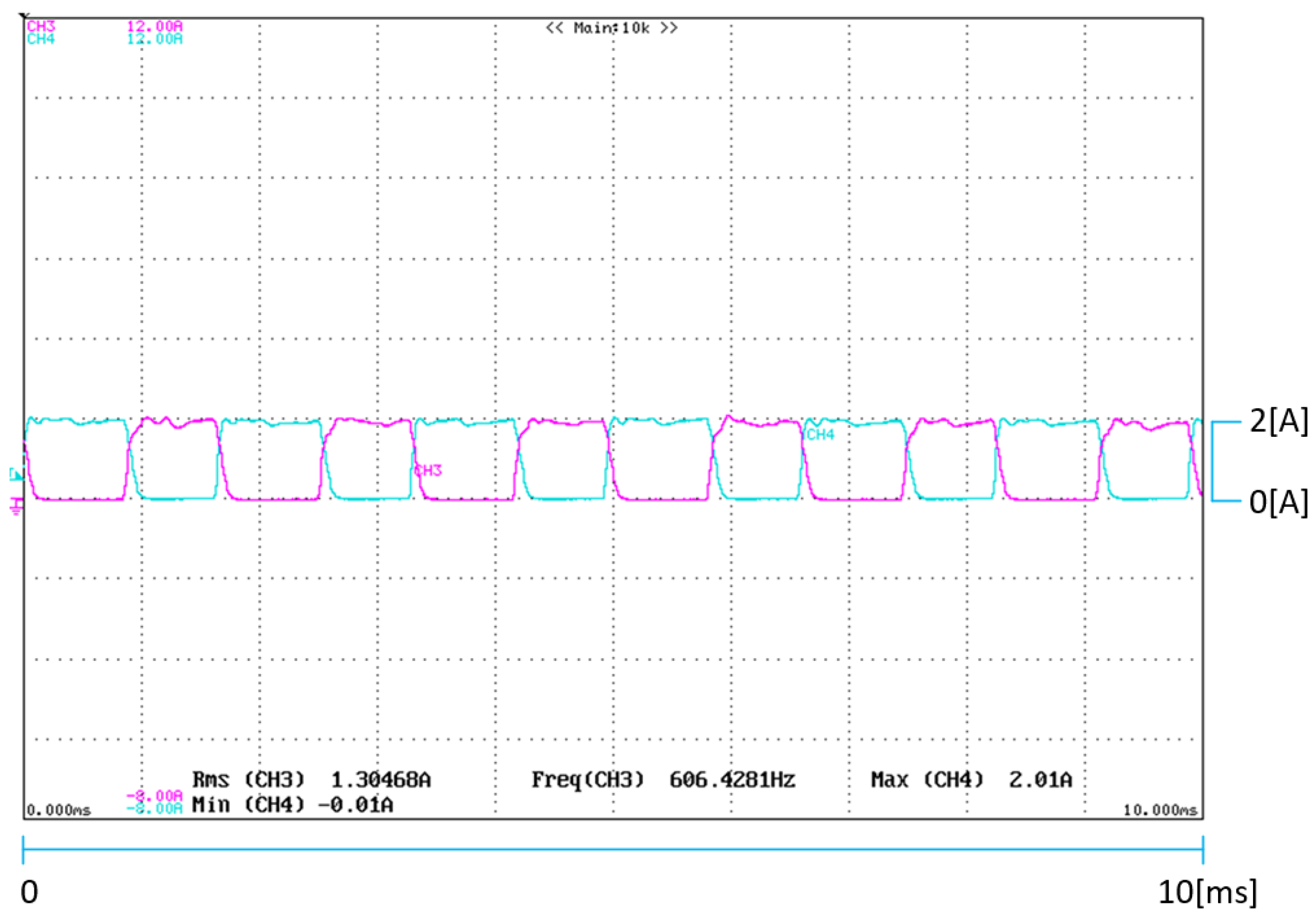
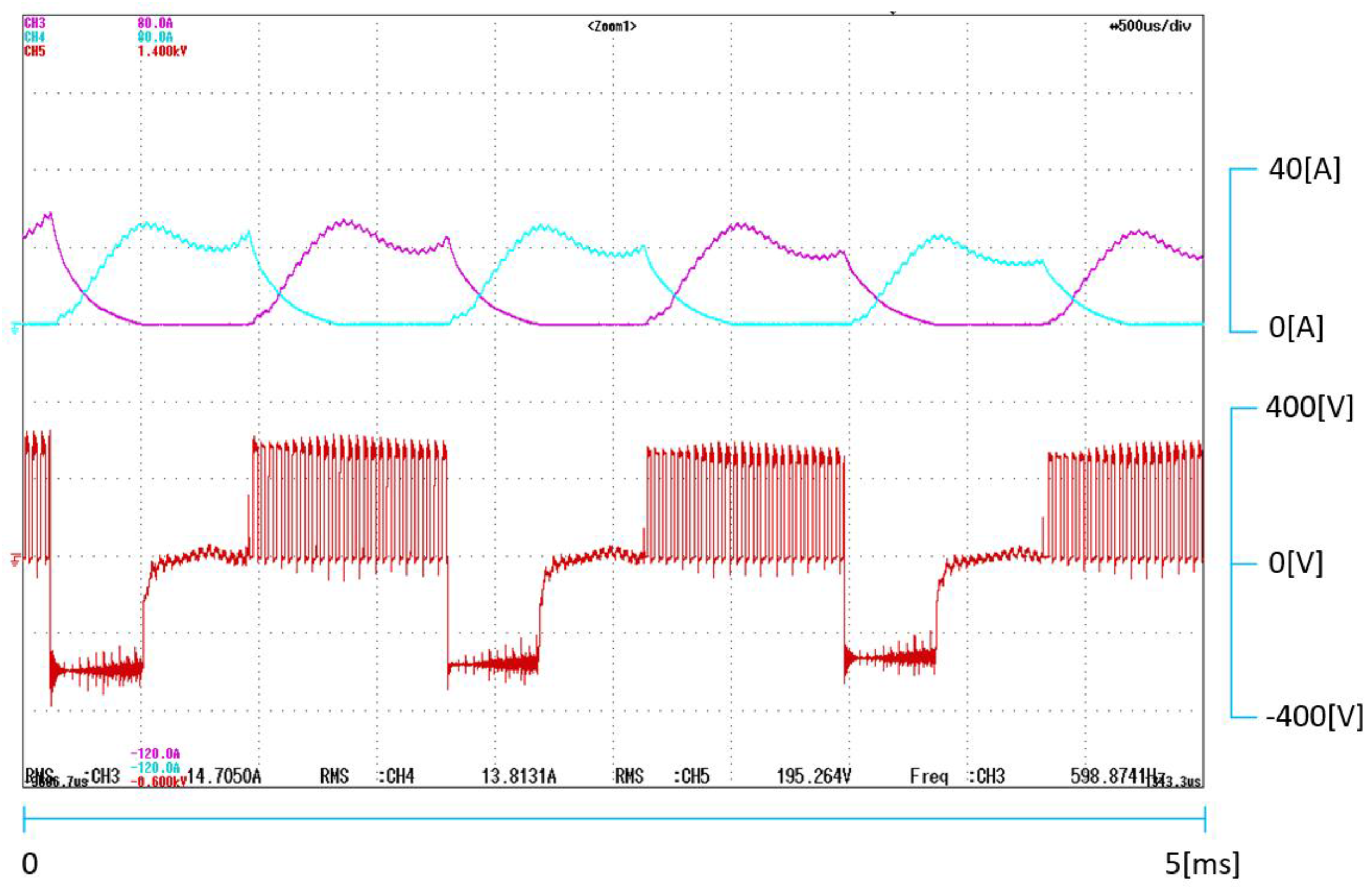
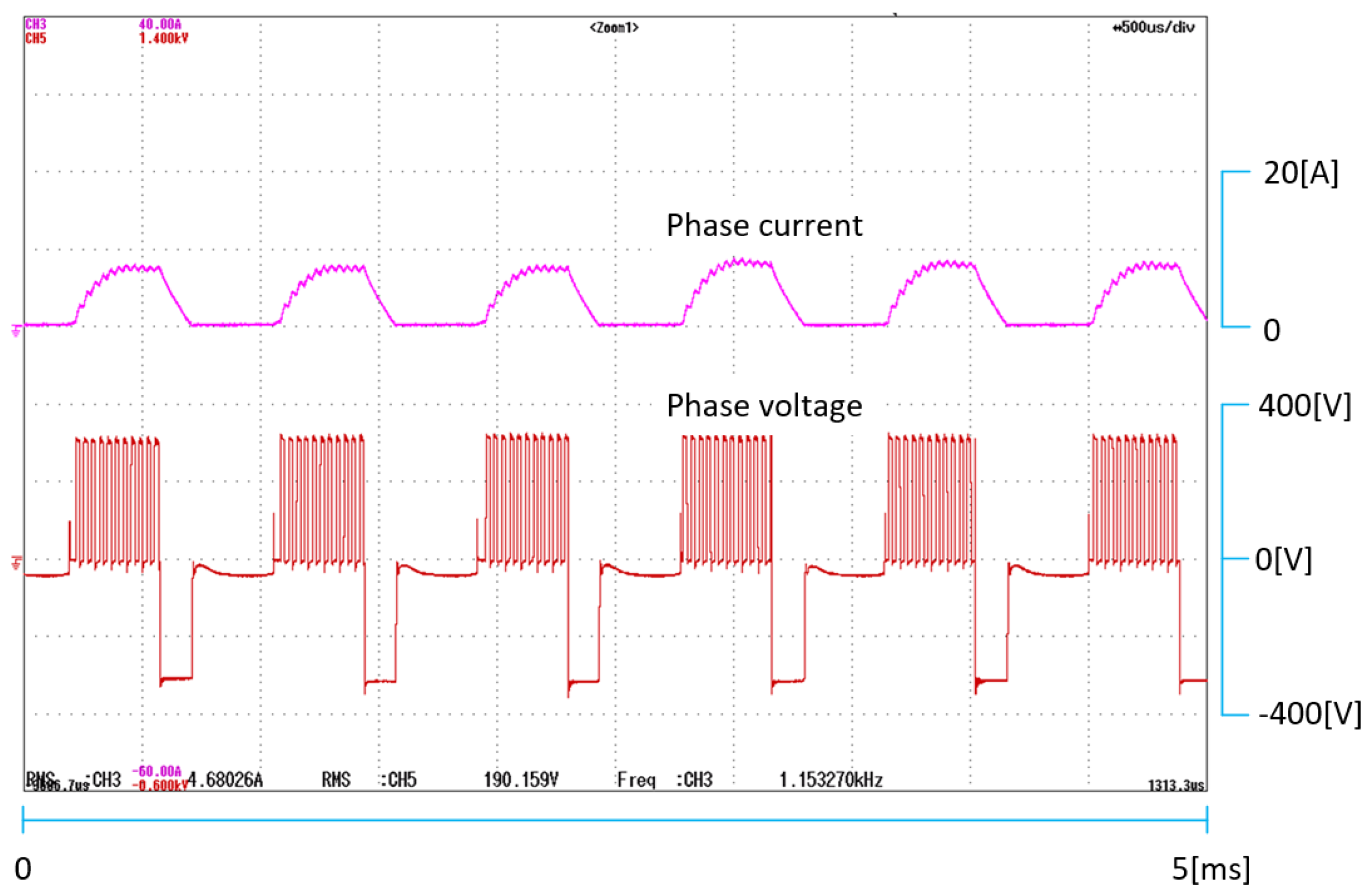
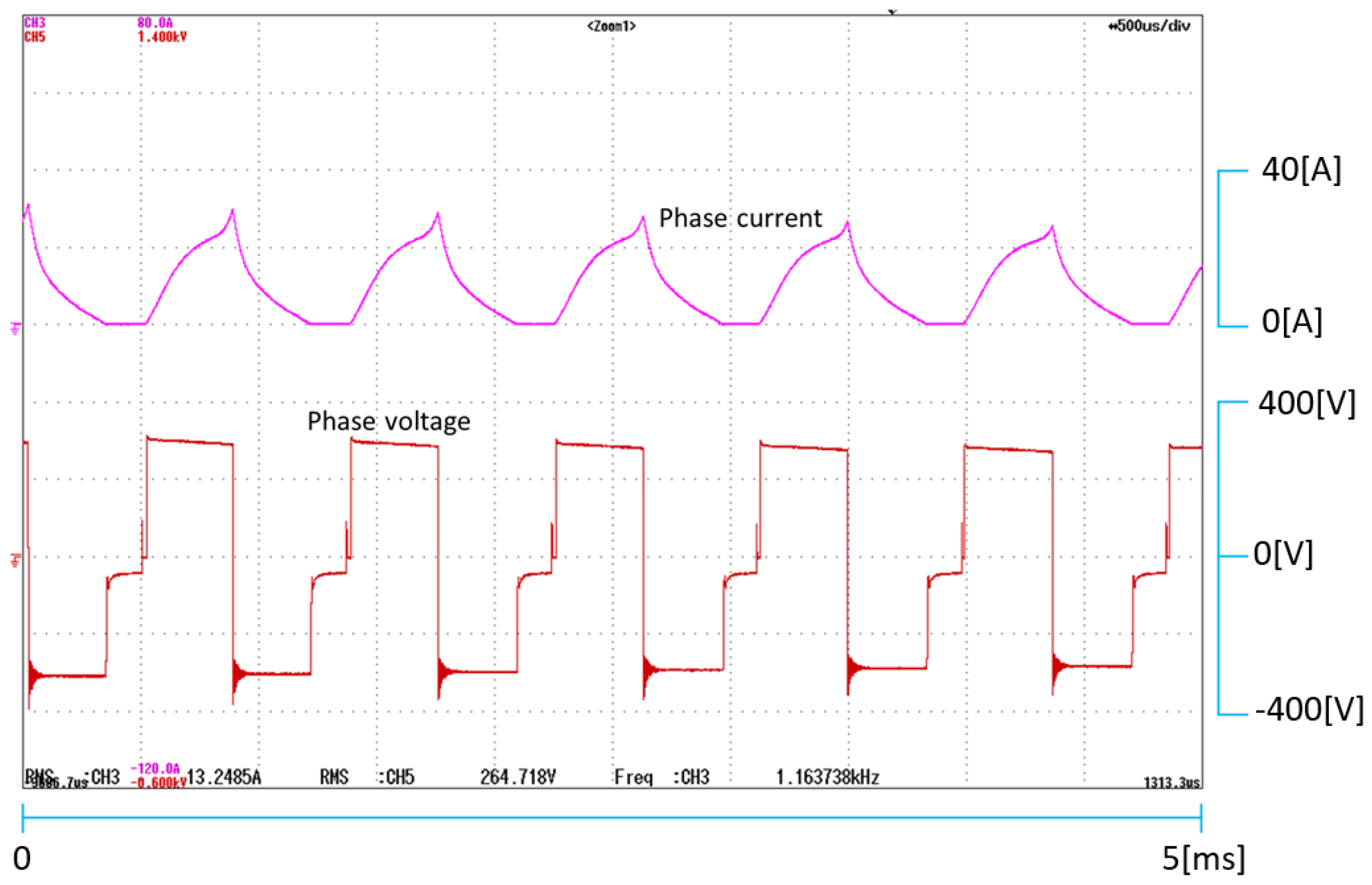
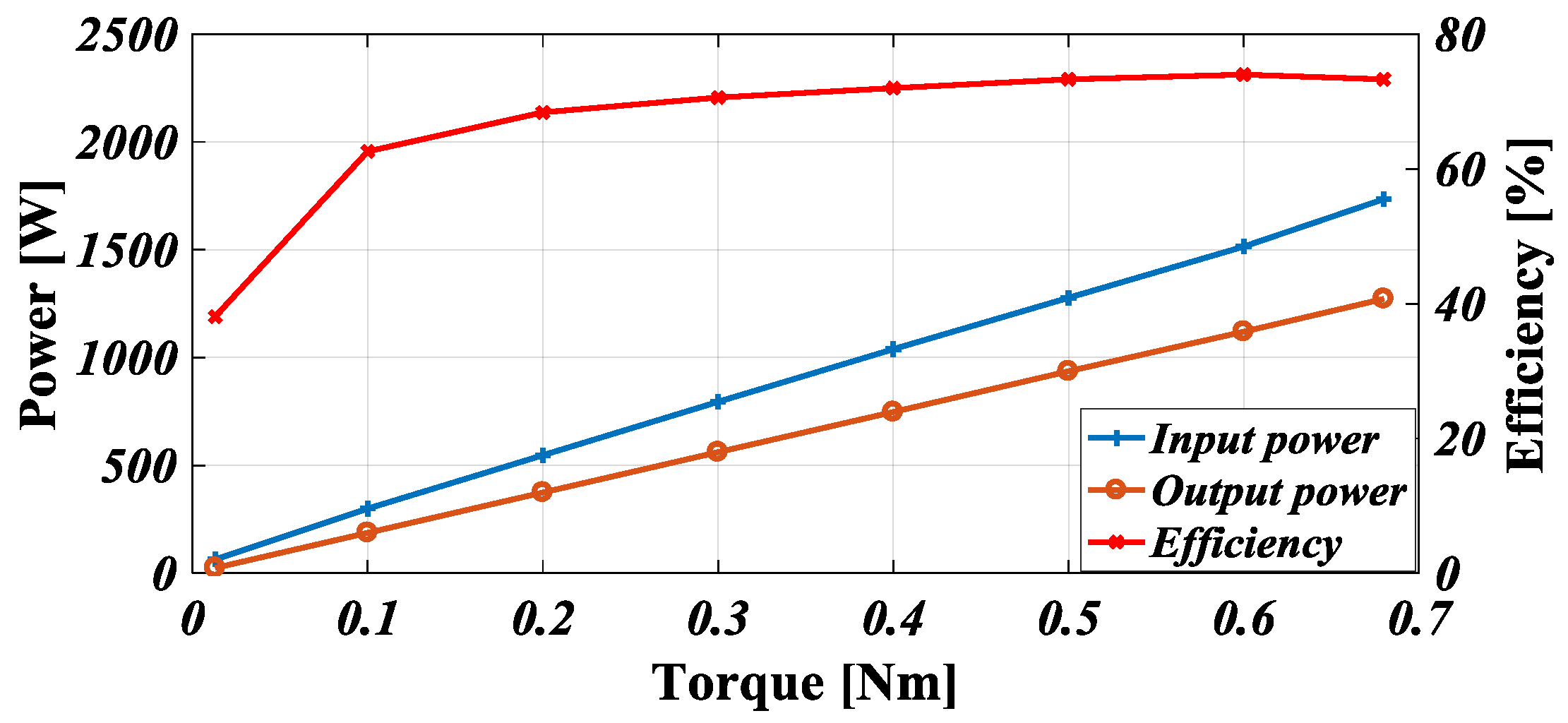
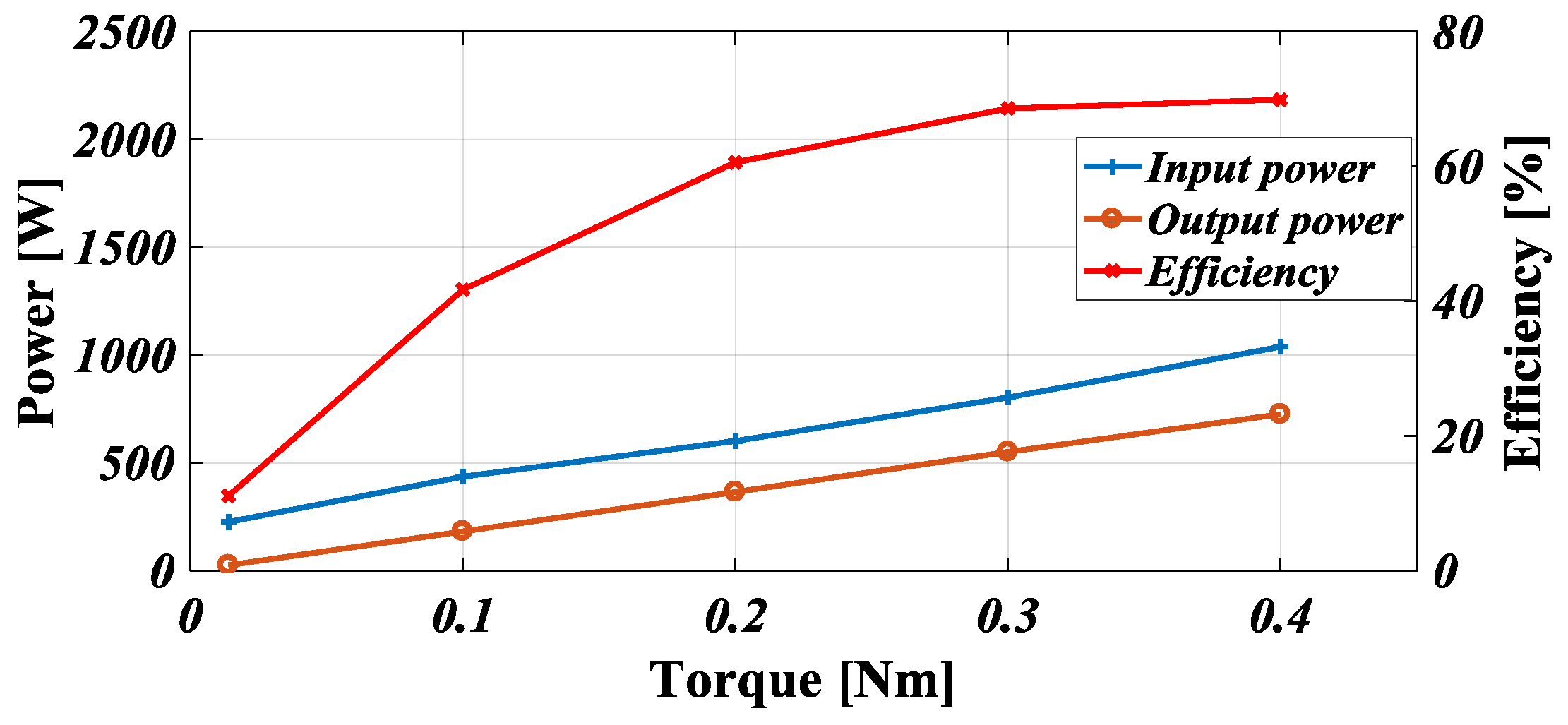
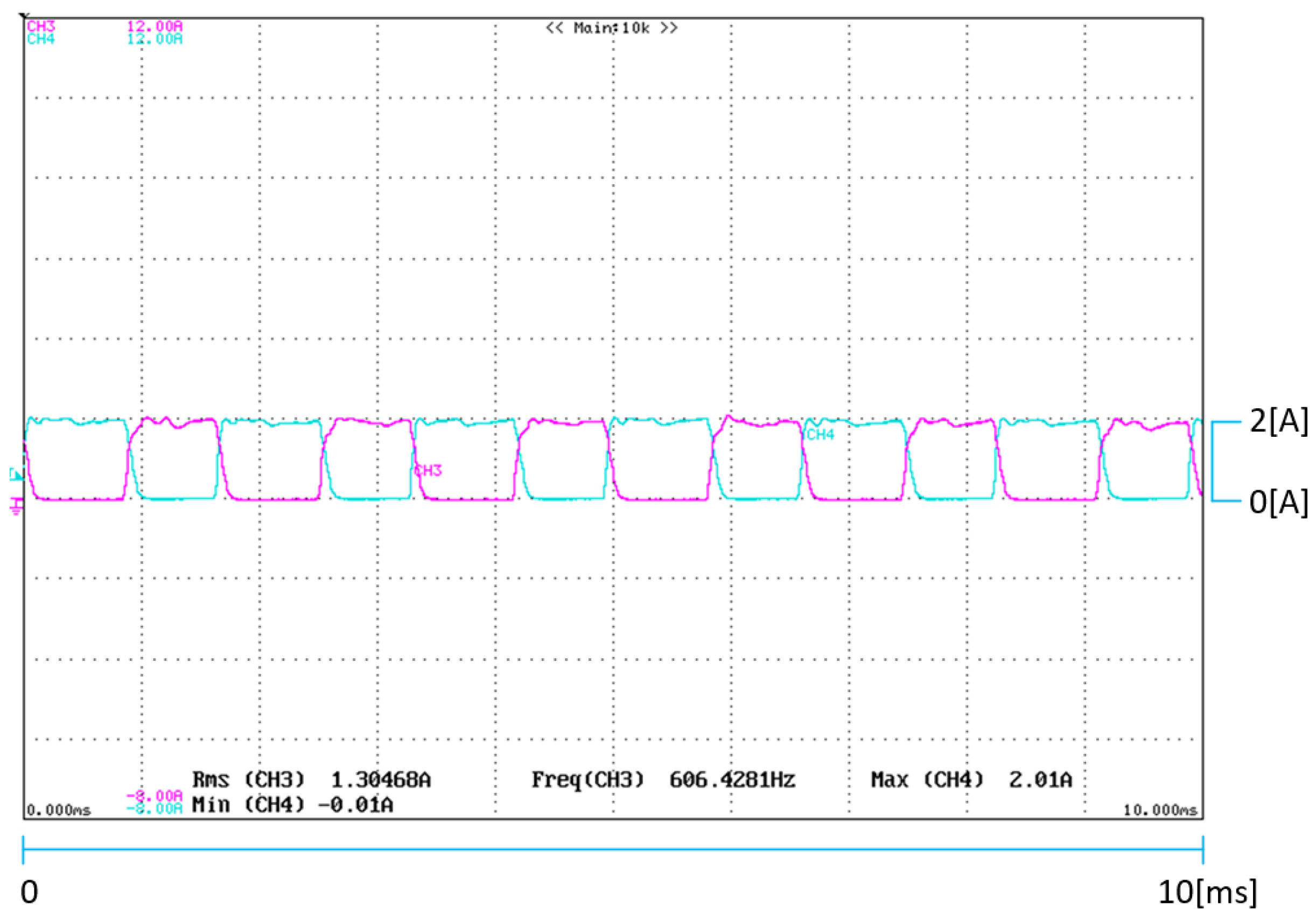
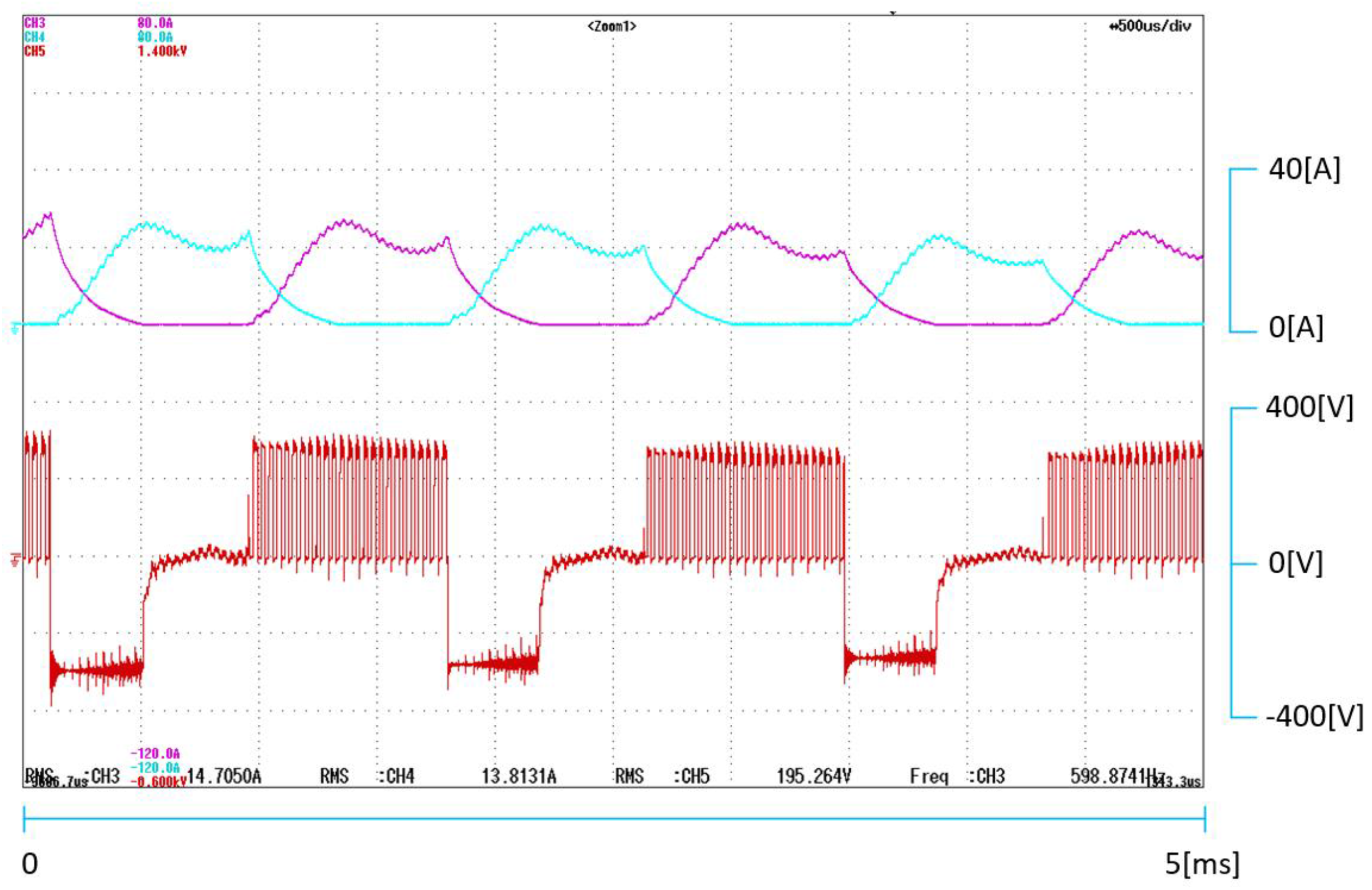
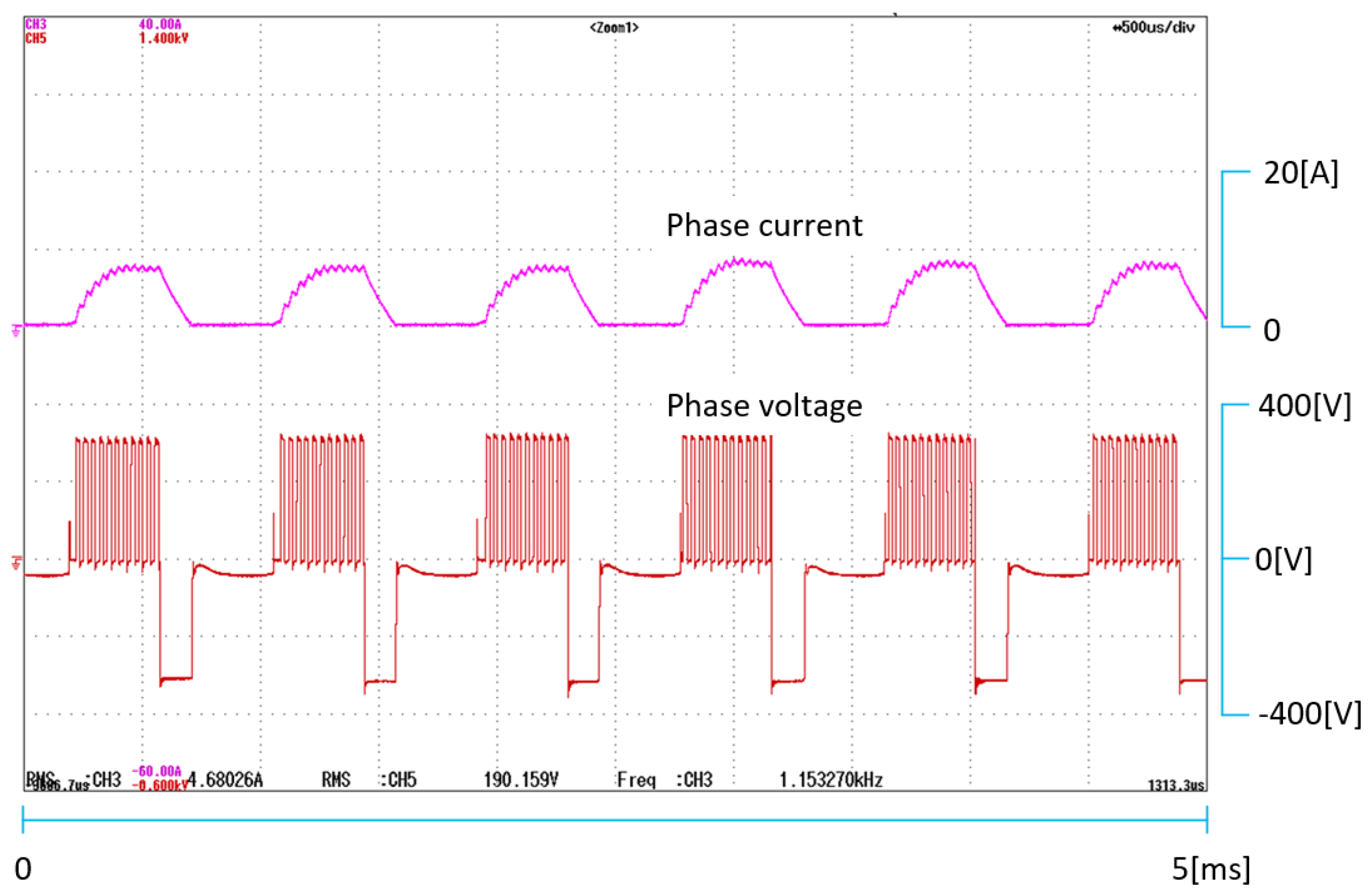
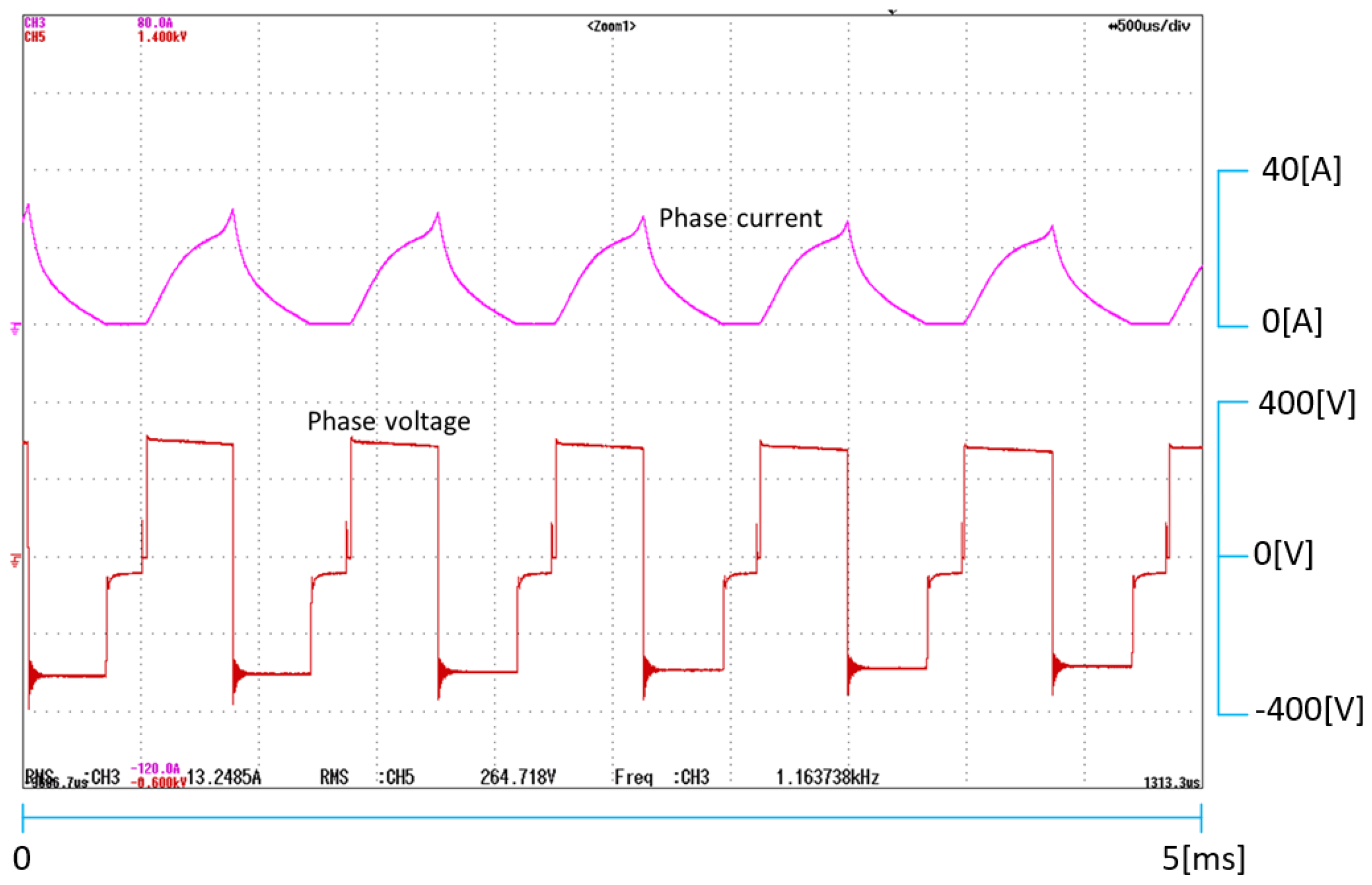
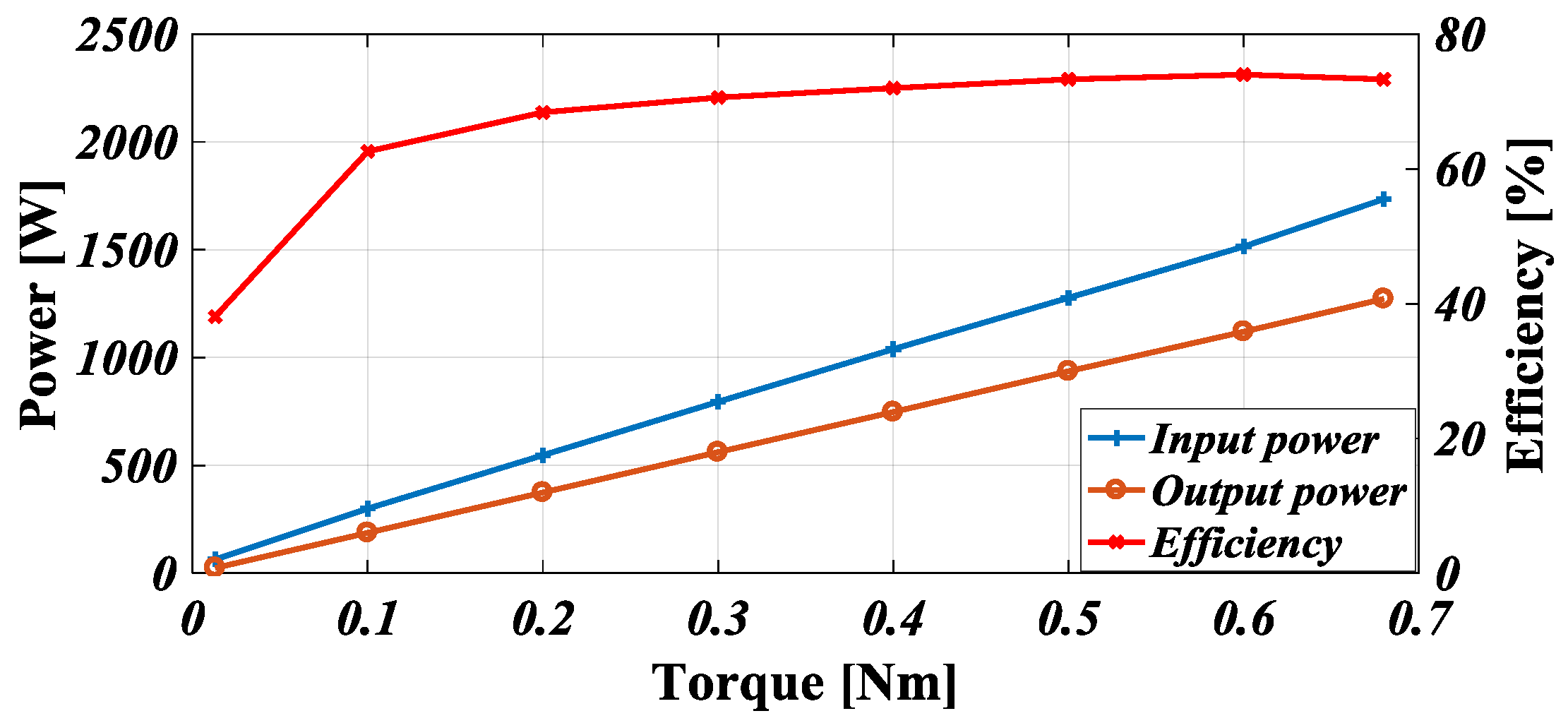
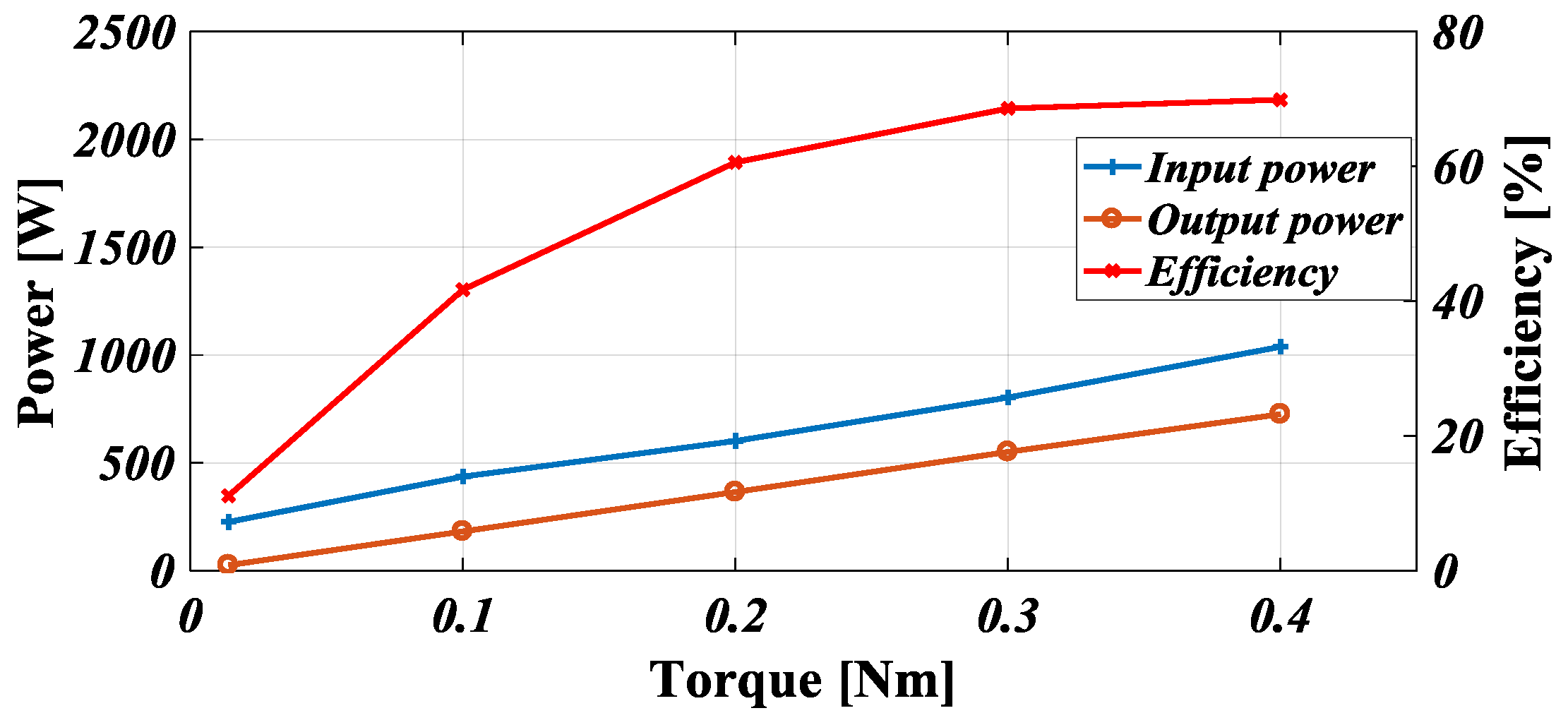
4.2. Experiments
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Krishnan, R. Switched Reluctance Motor: Modeling, Simulation, Analysis, Design, and Applications; CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar]
- Lee, D.-H.; Ahn, J.-W. Performance of High-Speed 4/2 Switched Reluctance Motor. J. Electr. Eng. Technol. 2011, 6, 640–646. [Google Scholar] [CrossRef]
- Jeong, K.-I.; Lee, D.-H.; Ahn, J.-W. Performance and design of a novel single-Phase hybrid switched reluctance motor for hammer breaker application. In Proceedings of the 2017 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, Australia, 11–14 August 2017. [Google Scholar]
- Torok, V.; Loreth, K. The world’s simplest motor for variable speed control? The Cyrano motor, a PM-biased SR-motor of high torque density. In Proceedings of the 5th European Conference on Power Electronics and Applications, Brighton, UK, 13–16 September 1993; Volume 6, pp. 44–48. [Google Scholar]
- Torok, V. Electric Motor with Combined Permanent and Electromagnets. U.S. Patent US5345131, 6 September 1994. [Google Scholar]
- Torok, V. Self-Starting Electric Brushless Motor Having Permanent Magnet and Reluctance Poles. U.S. Patent US6204587, 20 March 2001. [Google Scholar]
- Lee, D.-H.; Ahn, S.-Y.; Ahn, J.-W. Advanced Torque Control Scheme for the High Speed Switched Reluctance Motor. Available online: http://jchemed.chem.wisc.edu/Journal/Issues/2005/Nov/abs1601.html (accessed on 26 January 2018).
- Hieu, P.T.; Lee, D.-H.; Ahn, J.-W. Design and Operation Characteristics of Novel 2-Phase 6/5 Switched Reluctance Motor. J. Electr. Eng. Technol. 2014, 9, 2194–2200. [Google Scholar] [CrossRef]
- Minh Khoi, H.K. Design and Control of a High Speed 4/2 SRM for Blower Application. Master’s Thesis, Kyungsung University, Busan, Korea, 2010. [Google Scholar]
- Raulin, V.; Radun, A.; Husain, I. Modeling of losses in switched reluctance machines. IEEE Trans. Ind. Appl. 2004, 40, 1560–1569. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | 4/2 SRM | Hybrid 4/4 SRM |
|---|---|---|
| Number of phases | 2 | 1 |
| Stator outer diameter (mm) | 100 | - |
| Stator width (mm) | - | 58 |
| Stator length (mm) | - | 78 |
| Rotor outer diameter (mm) | 45 | 34 |
| Air-gap length (mm) | 0.25/0.8 | 0.5/1.2 |
| Stack length (mm) | 30 | ← |
| Shaft diameter | 10 | 13 |
| Parameter | Conventional 4/2 SRM | Proposed 4/2 SRM | Conventional Hybrid 4/4 SRM | Proposed Hybrid 4/4 SRM |
|---|---|---|---|---|
| Maximum torque (Nm) | 1.597 | 0.8214 | 1.1175 | 0.9289 |
| Minimum torque (Nm) | 0 | 0.3582 | -0.1870 | 0.1597 |
| Average torque (Nm) | 0.6960 | 0.6806 | 0.6302 | 0.5579 |
| Torque ripple (%) | 229.454 | 68.058 | 206.998 | 137.874 |
| Parameter | 4/2 SRM | Hybrid 4/4 SRM |
|---|---|---|
| Rated speed (rpm) | 18,000 | ← |
| Rated torque (Nm) | 0.68 | 0.40 |
| Output power (W) | 1272 | 725.4 |
| Torque/weight (Nm/kg) | 0.58 | ← |
| Power/weight (W/kg) | 1,088 | 1,048 |
| Efficiency (%) | 73.3 | 70 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lukman, G.F.; Hieu, P.T.; Jeong, K.-I.; Ahn, J.-W. Characteristics Analysis and Comparison of High-Speed 4/2 and Hybrid 4/4 Poles Switched Reluctance Motor. Machines 2018, 6, 4. https://doi.org/10.3390/machines6010004
Lukman GF, Hieu PT, Jeong K-I, Ahn J-W. Characteristics Analysis and Comparison of High-Speed 4/2 and Hybrid 4/4 Poles Switched Reluctance Motor. Machines. 2018; 6(1):4. https://doi.org/10.3390/machines6010004
Chicago/Turabian StyleLukman, Grace Firsta, Pham Trung Hieu, Kwang-Il Jeong, and Jin-Woo Ahn. 2018. "Characteristics Analysis and Comparison of High-Speed 4/2 and Hybrid 4/4 Poles Switched Reluctance Motor" Machines 6, no. 1: 4. https://doi.org/10.3390/machines6010004
APA StyleLukman, G. F., Hieu, P. T., Jeong, K.-I., & Ahn, J.-W. (2018). Characteristics Analysis and Comparison of High-Speed 4/2 and Hybrid 4/4 Poles Switched Reluctance Motor. Machines, 6(1), 4. https://doi.org/10.3390/machines6010004