1. Introduction
Aerodynamic foil bearings are increasingly becoming the focus of mobile applications. Drives with fuel cells require high-speed compressors for the intake air. The range of applications in the automotive industry opens up a mass market. Validated applications in turbochargers [
1] or in the environmental control system of a Boeing aircraft [
2] show good characteristics of the bearings with respect to wear, friction and space requirements. There is no need of fluids and additional devices like oil pumps or tanks. This results in low weights and low costs. However, the biggest disadvantage is the low load-capacity compared to oil lubricated bearings [
3]. Therefore, scientists worldwide are researching new bearing designs and looking for improved theoretical models. One concept is the (multi) leaf type bearing, initially developed by Garrett Corporation (USA) [
4]. It consists of circular arranged foils, each one bracing direct neighbors. The overall structure is point symmetric. To improve the load-bearing capacity researchers like Heshmat [
5], Arakere [
6], Silver and Wenban [
7], Du et al. [
8] or Duan et al. [
9] increased the foil stiffness by adding a backing structure below the “leafs”. The design varies from nearly undeformed foils [
7] to bumps [
9] or jagged stripes [
5,
8].
While some concepts can be described with simpler models but lead to less stiffness improvement, others are much more complex but still promising in regard to stiffness improvement. Heshmat and Heshmat describe for example a theoretical approach to design leaf-type bearings with above mentioned stripes. This includes predictions about the amount of foils, the right compliance and several other operation parameter [
5]. Arakere uses a similar method in [
6]. Unfortunately, comprehensive experimental data for leaf-type bearings is missing. Duan et al. discuss mainly the production of leaf-type and bump-type foils for an ø 25 mm bearing. The stiffness of their bearing, calculated from quasi-static force-displacement tests, is between app. 0.9 N/µm for small deflections and goes up to 13.8 N/µm for app. 100 µm shaft displacement [
9]. Li et al. explored the influence of structural parameters like the foil thickness, the free foil radius, the foil overlapping ratio and the radial clearance on the load capacity. The tests carried out consisted of a variation in static load on the rotor and the measurement of the shaft eccentricity. Backing structures were not used [
10].
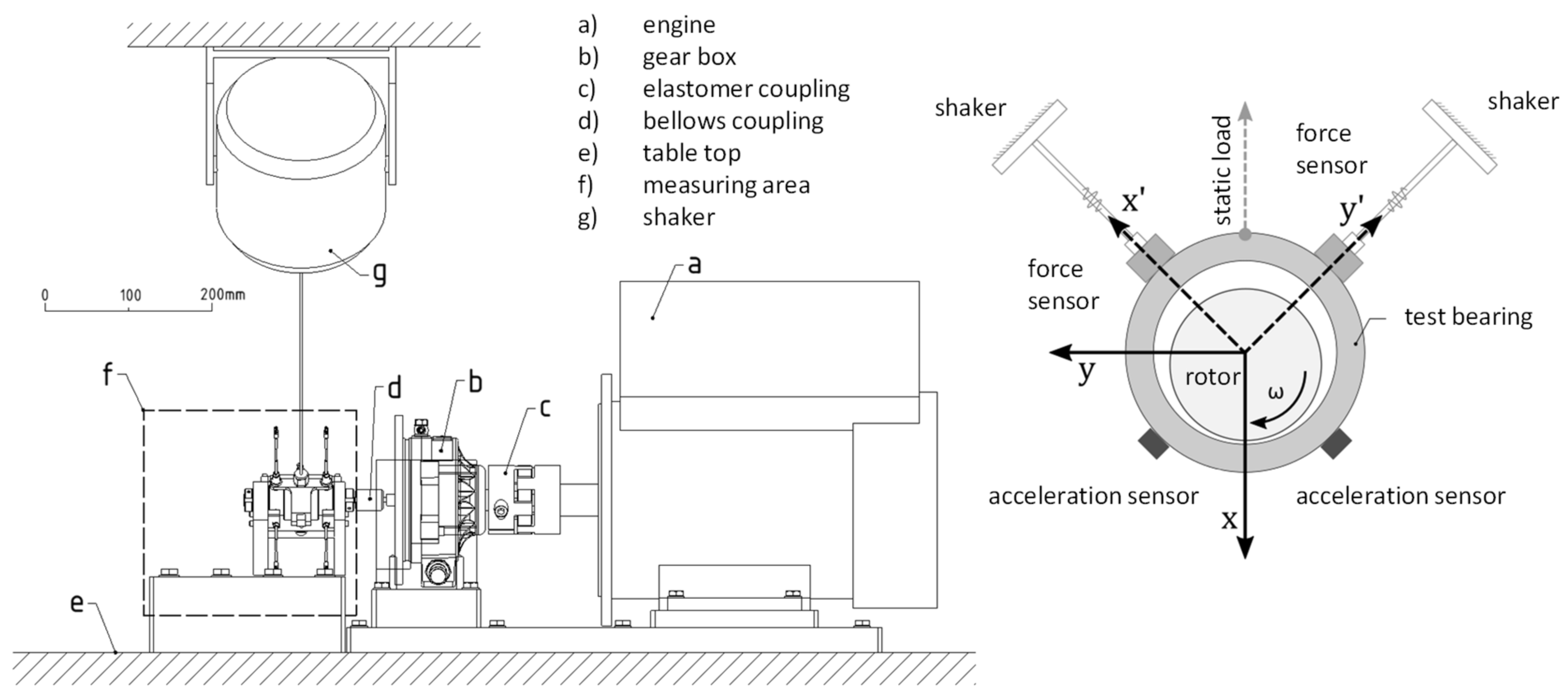
A central question with foil bearings is: How to measure the dynamic behavior including the damping? Many scientific work groups use the impedance test rig based on the concept proposed by Childs et al. [
11] to observe the frequency-dependent stiffness k and damping c of the foil structure. It consists of two orthogonal measurement axes, each containing an electromagnetic shaker and also sensors to measure acceleration, force and displacement. From the measured data 4 direct and 4 cross-coupled coefficients are calculated (4 × 4 matrix for stiffness and 4 × 4 matrix for damping) [
11]. The representation of damping and stiffness curves in a qualitative format will mainly be used for the comparison of the experimental results with the numerical structure models. It is also common to present the results as loss factor as input for rotor dynamic simulations [
12]:
San Andrés and Chirathadam used a test rig with rotating shaft to investigate a metal mesh bearing. They excited the bearing with a sweep sine and showed an inversely proportional relation between stiffness and motion amplitude. However, the average loss factor remained at app. 1 [
12]. In another experiment San Andrés and De Santiago used harmonic input signals (single frequency) to achieve maximum shaker efficiency and to lower the error in post-processing due to the higher amplitudes in their oil-film bearing. Applying linear models to non-linear systems is actually only reliable for small movements [
13]. The same method was used by Heshmat and Ku to observe the dynamic behavior on their test rig with non-rotating shaft and a controllable static loading device. Their theoretical and experimental results of a bump-type bearing showed a decrease in direct stiffness and damping coefficients with increasing motion amplitude [
14]. Rudloff et al. [
15] as well as Delgado [
16] determined dynamic coefficients at high speeds of an ø 38.1 mm bump-type bearing [
15] and a relative big (ø 110 mm) hybrid bearing (combination of hydrostatic and hydrodynamic film pressure) [
16]. Rudloff et al. tried to keep a constant excitation force because the coefficients of the investigated bearing were strongly dependent on the frequency and the amplitude of movement. The frequency band investigated ranged from 100 to 600 Hz [
15]. Feng et al. focused on the material properties of a combined bump-mesh-type bearing. Therefore the shaft was fixed (non-rotating) and only one measuring axis was used. The calculated loss factor ranged between app. 0.2 and app. 0.6 [
17]. A more detailed examination of bump-foils itself has been made by Salehi et al. The foil was mounted in the center of a test rig and dynamically loaded via a shaker. It has been shown that the damping depends mainly on the vibration frequency, the motion amplitude and the applied load [
18].
This paper presents and discusses stiffness and damping coefficients of a leaf-type bearing structure with undersprings. The test parameters are inspired by the above-mentioned publications in order to cover the most important influences, i.e., variation of the static load, variation of the motion amplitude and the effect of a force- or a displacement-controlled excitation. The usually neglected non-linear components are quantified here via the distortion factor in order to make statements about the comparability of the results with each other.
3. Results
The tests described below show the influence of the static loads (0.4 to 1 kg per axis), the difference in controlling (force or displacement) and the stick-slip effects. The first attempt to identify the right parameters is displayed in the hysteresis curves in
Figure 6 and the stiffness data in
Figure 7. The hysteresis curves contain the measured raw data of one measurement without any windowing or Fourier transformation. To avoid random measurement errors 50 periods where superimposed and averaged. Each point thus represents the averaged force and displacement that were present at the same time within a period. The frequency band (100 Hz to 500 Hz) was divided into 60 steps as a compromise between measurement duration and frequency resolution. The selection of hysteresis curves in
Figure 6 is limited to the frequencies where changes are visible. In order to find suitable start parameters, the force amplitude was increased until the first uniform oscillations were present in the lower frequency range (10 N). A more detailed description can be found in
Appendix A.
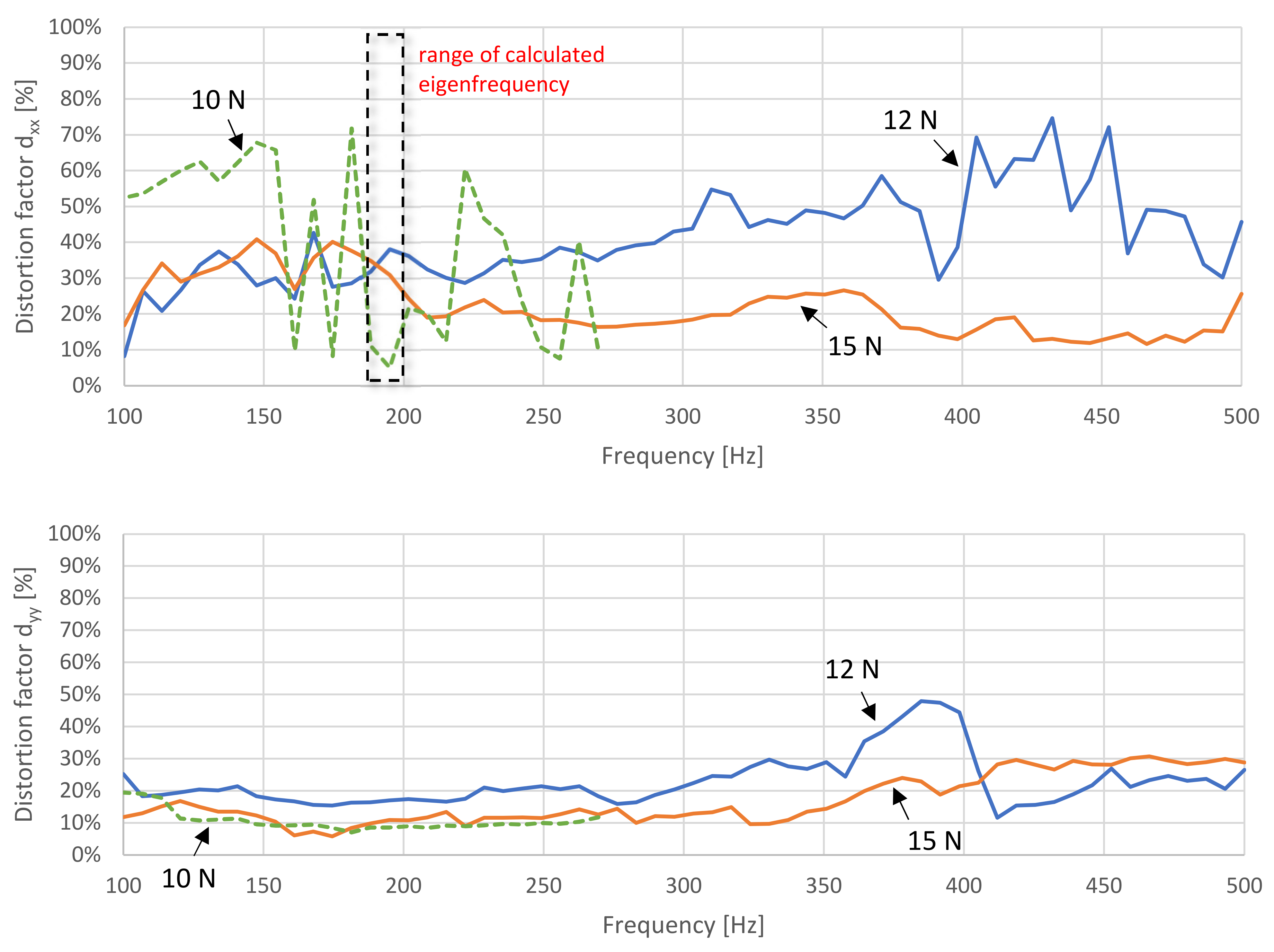
At 10 N and a static load of ca. 11.1 N, friction between 161 Hz (squeezed ellipse) and 168 Hz (straight line) starts to completely block the foil movement (see the collapse of the hysteresis curve). This blocking leads to a stiffer bearing and increases the eigenfrequency. If the force is slightly above the static friction, sudden stiffness jumps due to the break free (followed by consecutive stick-slip effects) occur, causing non-linear vibrations. Furthermore, it should be noted that this extreme small movements can hardly be detected by the sensors and are overshadowed by noise (despite averaging). This is why the ideal elliptic hysteresis curves become more and more deformed as the force amplitude decreases or the frequency increases, i.e., the ratio of inertia force to force increases—so the displacement amplitude decreases, even if the force keeps constant. The stiffness curves in
Figure 7 sum up the behavior quite accurate. Continuous curves are measured up to the individual blocking frequency, followed by large jumps. The difference between the force levels is particularly visible in x direction. The maximal values are greater and the stiffness decreases significantly at higher force amplitudes. Thus, it is absolutely necessary to define a minimum force or displacement amplitude to avoid big distortion factors d
ln of each direction. Distortion factors describe the impact of super harmonic vibrations on the signal [
24]:
In case of sinusoidal (harmonic) curves, the root-mean-square I (index is equal to order of super harmonics) depends linearly on the amplitude
[
24]; this also counts for the amplitudes r in the sensor signal parameters
:
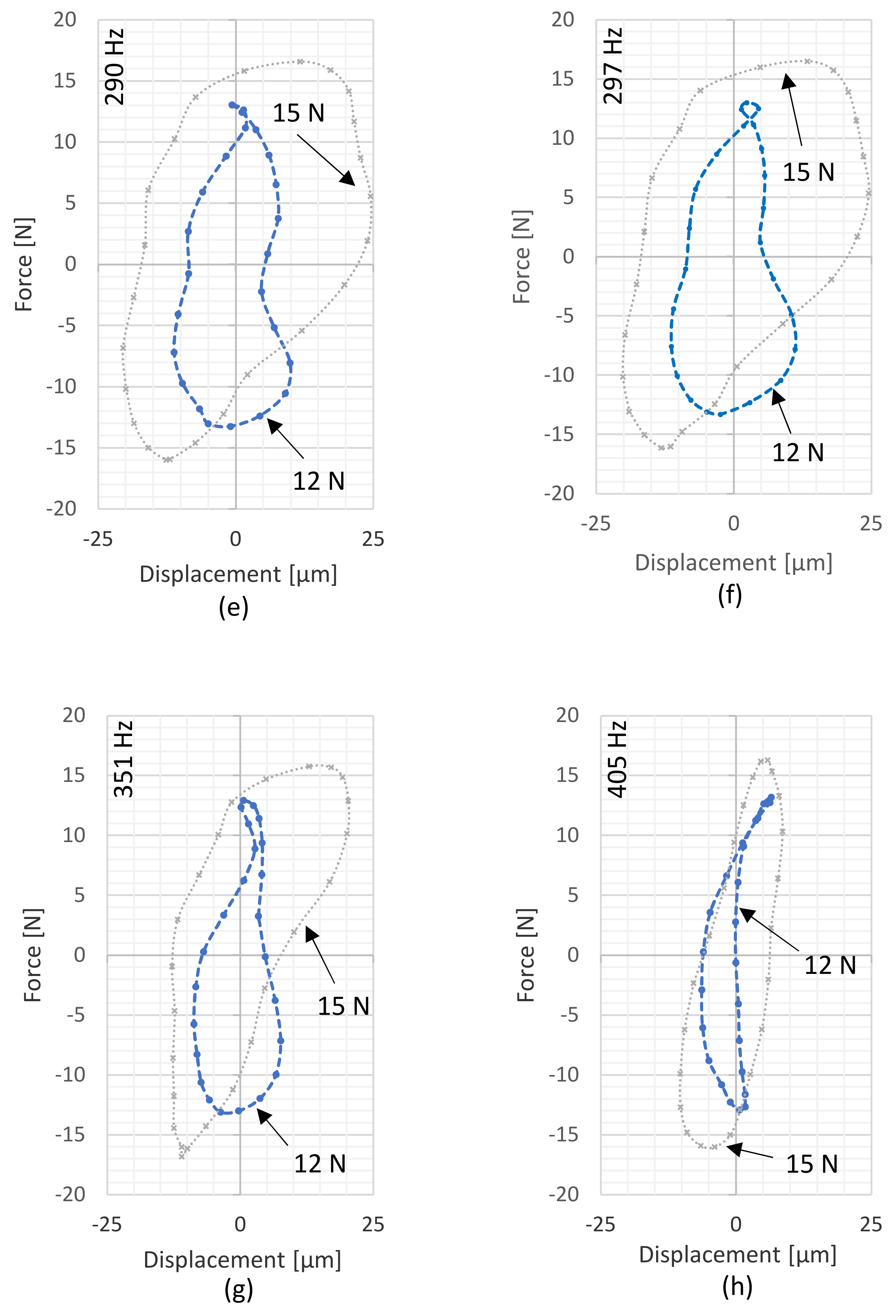
The comparison of the hysteresis curves of 12 N and 15 N at 161 Hz as well as the distortion factors d
ln presented in the
Figure 8 show that the sharp peaks of the shape disappear with distortion factors d
ln at app. 25%. The related stiffness values (15 N force amplitudes) for distortion factors below that threshold are k
xx ≈ 0.5 N/µm and k
yy ≈ 0.4 N/µm. Calculating the eigenfrequency of the test bearing (mass of all moving parts: 350 g)
Leads to a frequency range right below 200 Hz (
Figure 7 and
Figure 8). Herein, the phase difference of force and motion decreases and the sign subsequently reverses (see tilting of the hysteresis curves in
Figure 6). Due to its self-reinforcing nature, this area should be examined carefully.
As a consequence of these findings,
Figure 9 displays only the acceptable range from app. 200 Hz to 350 Hz. The stiffness remains almost constant in this range, while the damping shows a quadratic curve (see dotted regression curves and related equations). The stiffness and damping in y direction are nearly 0.2 N/µm and 80 Ns/m (200 Hz) to 400 Ns/m (350 Hz) larger than in x direction. Additional measurements with displacement controlling (
Figure 10 and
Figure 11) induce slightly decreasing stiffness (linear) and damping curves (x
−1). The regression curves for these diagrams are calculated from data averaged from three successive measurements with a static load of app. 8.3 N. The stiffness k
xx has nearly the same gradient and value (app. 0.1 N/µm deviation) for app. 5.5 N up to 11.1 N static load whereas k
yy depends greatly on the static load. At 200 Hz the difference between 5.5 N to 8.3 N and 8.3 N to 11.1 N is app. 0.1 N/µm each. Until 360 Hz this difference halves. The same observation is notable for the damping. The deviation of c
yy for 5.5 N to 8.3 N and 8.3 N to 11.1 N is about twice (app. 100 Ns/m) as large as for c
xx.
The variance of the data points (e.g., in
Figure 9) are mainly due to the error in controlling the force amplitude (see variance of force amplitude between 14.7 N to 15.2 N in
Figure 12). However, it must be noted that each measured point in the diagrams depends on several boundary conditions that could force the non-linear system to behave completely differently! Strictly speaking, these data points can therefore not be approximated with gradients. It is noticeable, however, that despite non-linearity and despite the discussed influencing parameters, trends are reflected in the measured data (see fitted curves).
Figure 13 and
Figure 14 display data collected while changing the target value from 6 µm to 20 µm. The small displacement amplitudes lead to high distortion factors (similar to the discussed force control) shown in
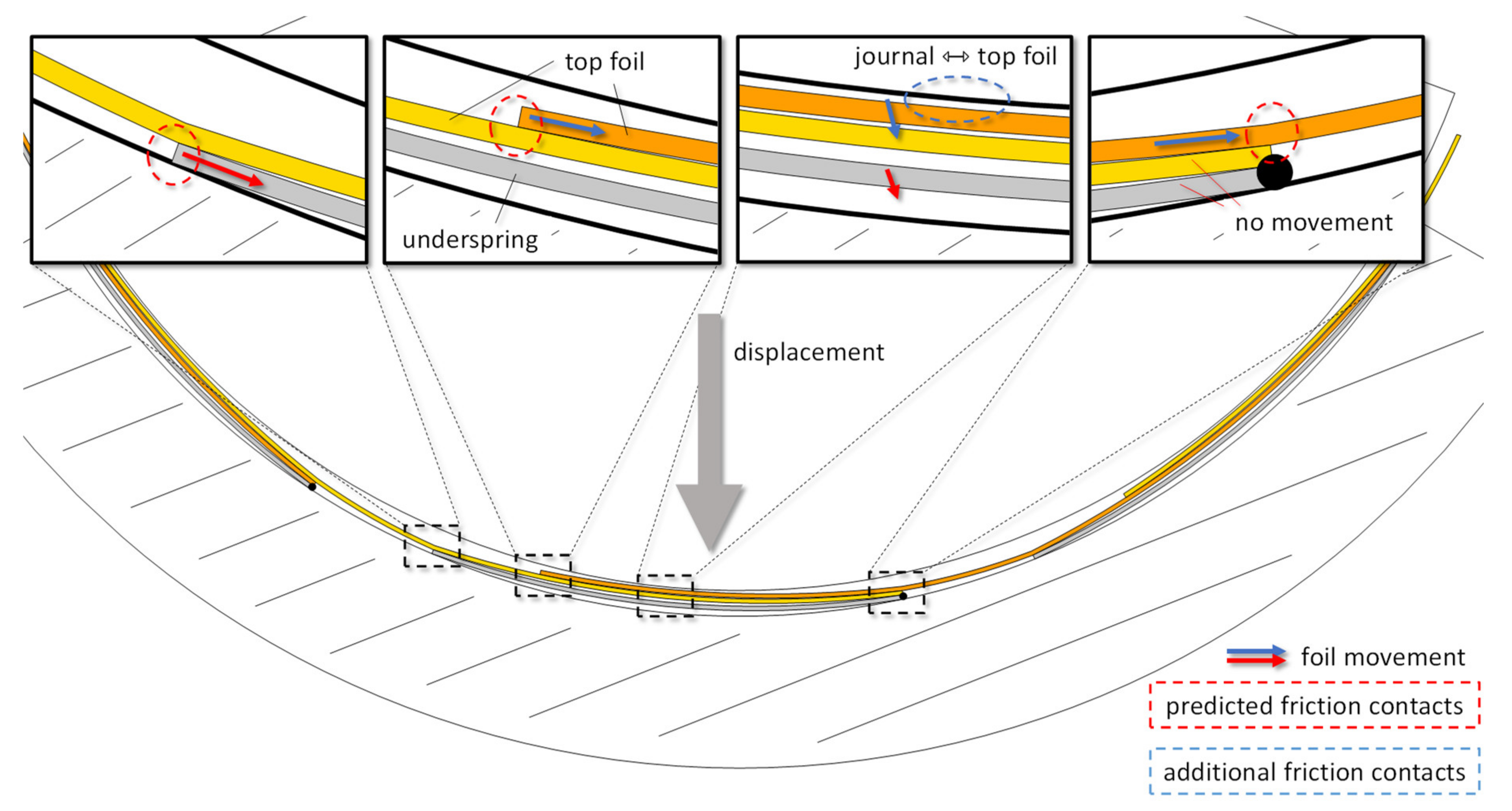
Figure 15 whereas 14 µm and 20 µm have a similar non-linear vibration behavior. It is noticeable that greater displacements cause lower stiffness (ca. 0.2 N/µm) and damping values (ca. 250 Ns/m). The reasons may be initial forces inside the foils (reduced normal forces), a non-linear behavior of the coating between the journal and the top foils, and a non-linear angular change of the direction of the evasive foil movements due to the deflection of the foils (
Figure 5). The friction itself was assumed to be independent of speed (coulomb friction) [
2].
The changing static load has a small impact in x-direction and an obvious one in y-direction. Loads between approx. 5.5 N and 11.1 N have a similar effect: the difference of stiffness in x is approx. 0.05 N/µm, whereas a static load of approx. 13.9 N seems to lead to an overload with almost no foil deflection in x-direction. The orthogonal direction is more prone to the variation of loads and shows changes of 0.3 N/µm in stiffness. The reason lies in the asymmetry due to static loads mentioned above. The preload causes friction and prevents the evasive movement of the foil ends, whereas foil 8 seems to be nearly blocked with all chosen loads the movement of foil 2 has a bigger range from freely sliding to a disabled condition (foil numbering see
Figure 4). Furthermore, higher loads tend to lead to higher stiffness and damping values. Although the curves of approx. 5.5 N contradict this statement, they only consist of one measurement instead of the average of at least three measurements like the curves of ca. 8.3 N and ca. 11.1 N. In contrary, a static load of ca. 13.9 N seems to be mainly supported by the end of foil 8 and leads so to a huge difference in x- and y-direction.
4. Discussion
However, how to compare the results obtained by a force- or displacement-controlled test? As it turned out, calculating the loss factor for each measurement leads to a similar trend (
Figure 16). The loss factor, which is given by the relation between damping and stiffness (Equation (1)) increases with frequency. The diagram also shows the impact of static load which causes greater relative differences in stiffness as in damping. More preload results in smaller values. Furthermore, the relation between displacement and friction discussed above causes greater incline of the force-controlled result γ
11.1 N, 15 N (the first index describes the static load and the second the target value for controlling) compared to the displacement-controlled curves γ
8.3 N, 20 µm and γ
11.1 N, 20 µm. The intersection point of γ
11.1 N, 15 N and γ
11.1 N, 20 µm should be at 0 Hz because of the same static load condition (11.1 N). Considering the results in
Figure 16 this is plausible.
Unfortunately, there are hardly any comparable publications of experimental results of leaf-type bearings. However, it is known that similar dimensions of bump-type bearings for example induce loss factors of ca. 0.25 [
15] and of metal mesh bearings induce loss factors of 0.8 to 1.5 [
12]. A reported experiment with bump-type dampers [
18] also shows the above described dependencies on the displacement amplitudes, the static loads and the frequency on the damping.
The calculated loss factors in this article are surprisingly high and should lead to a bad lift-off. For the verification and to determine the influence of the foil-shaft contact results of a conventional test rig were used.
Figure 16 shows a reduction of the loss factor with higher rotation speeds. Below lift-off (app. 32,000 rpm tested with app. 5.7 N) the loss factor is between 1.6–2 and drops to 0.45–0.56 (excl. sweep start frequency) at 60,000 rpm. There is just a small difference between the two highest speeds. The air film has stiffened up.
It should be noted that there are slight differences between both test rig setups and the angular direction of the static load. Therefore, the loss factors calculated from the conventional test rig and from the new one cannot be perfectly equal. This can also be observed in the results (
Figure 16), which are derived from the
Figure 10 and
Figure 11. Most similar are the results for the 0 rpm conventional test (7 N) and the displacement controlled test γ
8.3 N, 20 µm (8.3 N). It should be noted that the conventional test rig had no displacement or force controller. Therefore, it is plausible that the results of both test rigs show in some areas conformity (200–280 Hz: deviation < 15%) and in other areas greater deviation. Nevertheless, both test methods show large loss factors and so predict a relative high lift-off speed.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}