
A Low-Cost System for Remote Access and Control of Automation Equipment †




Abstract
:1. Introduction
2. Materials and Methods
2.1. Overview of System
2.2. System Component Descriptions
2.2.1. Remote Screen Sharing Software
- Remote wake, restart, and install of applications on devices running TeamViewer client;
- Secure remote access;
- Control of a remote computer or Android device as if a user were sitting in front of it.
2.2.2. Graphical User Interface (GUI) and Camera
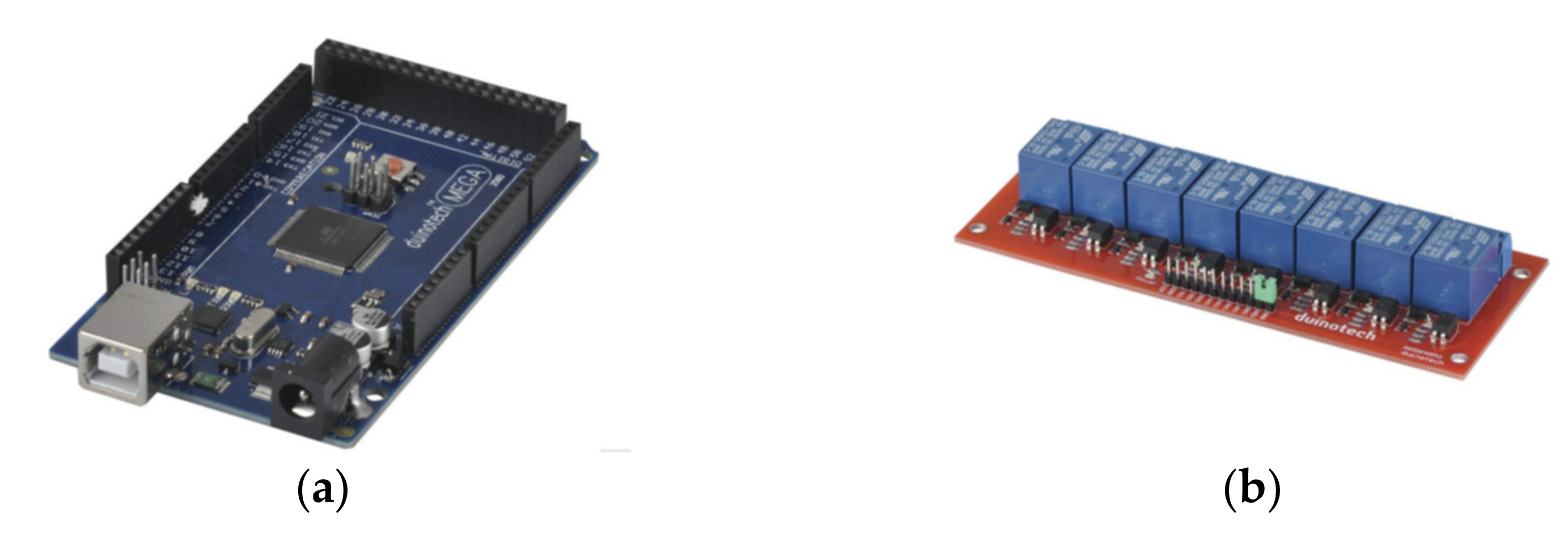
2.2.3. Micro-Controller
3. Results
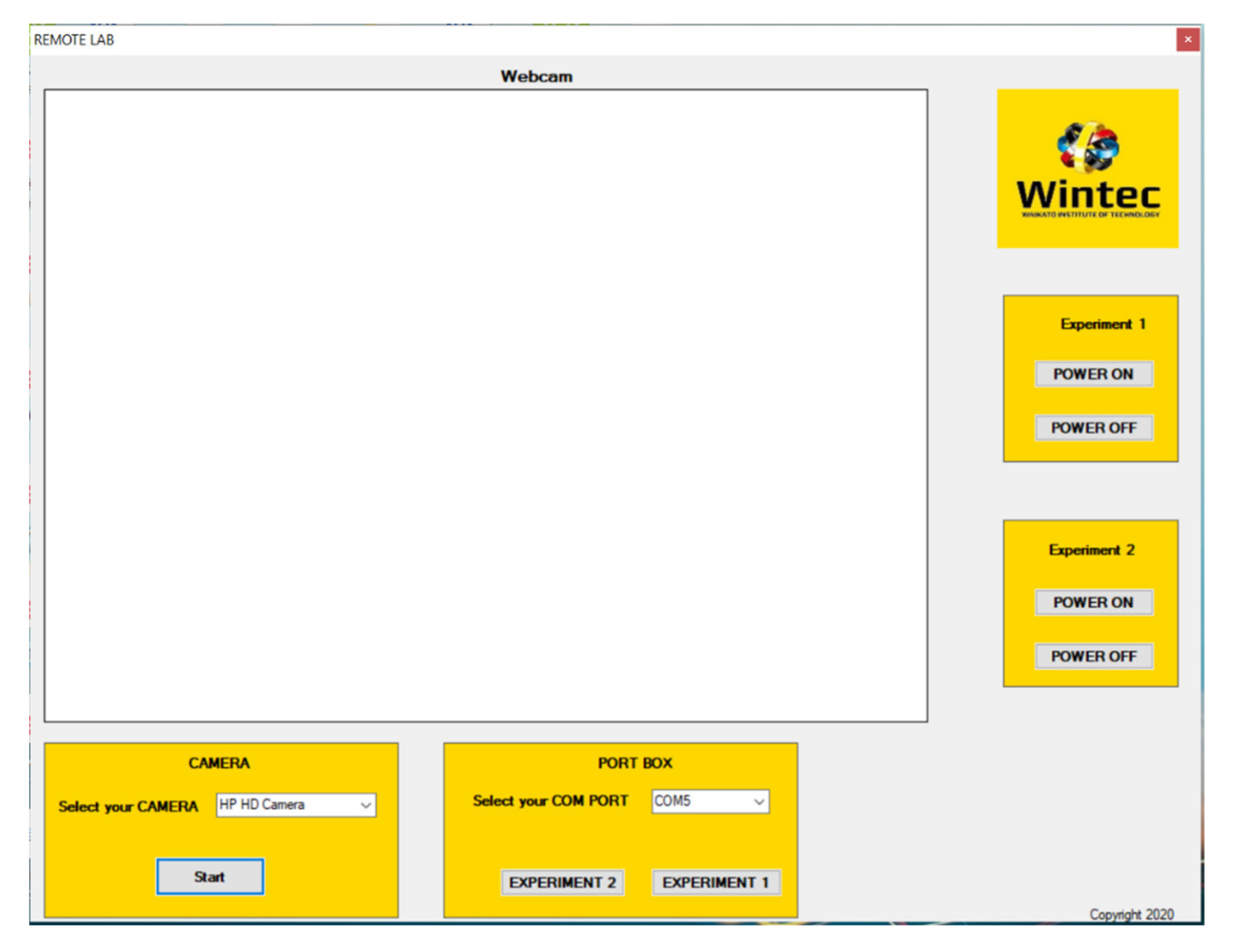
3.1. GUI Program Layout
- Video Screen—The white rectangular portion under the heading “Webcam” is allocated to show the video of the hardware. This is accomplished via the web camera installed in the lab. The video captured from the web camera inside the lab is made visible in this section with appropriate programming done with windows forms application.
- Camera Selection—The yellow rectangular block in the bottom left corner of the window with the heading “CAMERA” is used to select the required camera from the list of cameras available. Since the laboratory computer is a laptop computer there is an option to select the built-in HD web camera or the Logitech C920 HD Pro.
- Experiment Selection—The yellow rectangular block in the bottom centre of the window with the heading “PORT BOX” is used for the selection of the experiment. Before selecting the experiment, the communication port must be selected from the drop-down menu. By default, this is COM3 to establish communication between the computer and the micro-controller.
- Experiment Power—The remaining two yellow blocks on the right side of the window are used to power on/off each hardware experiment individually.
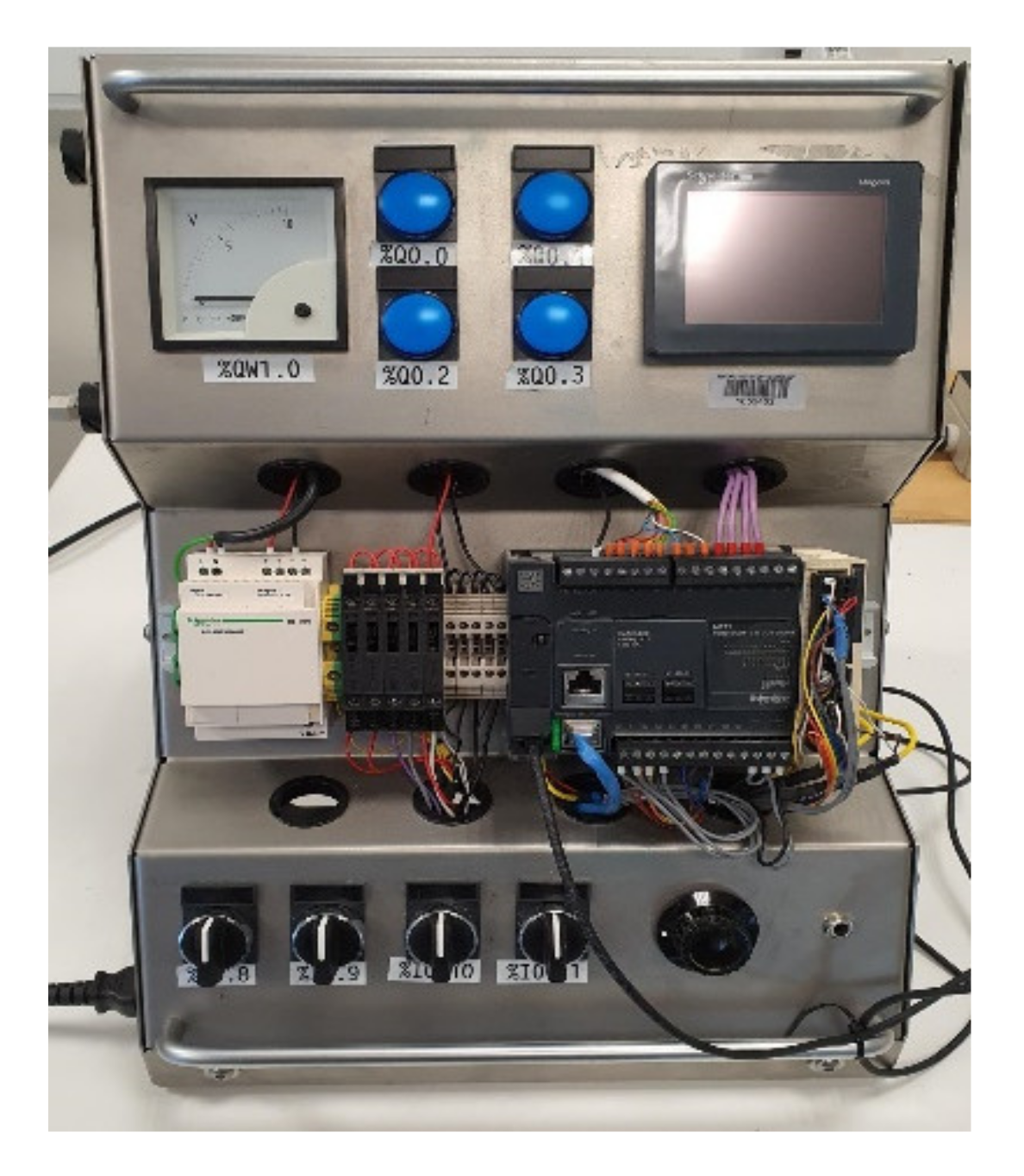
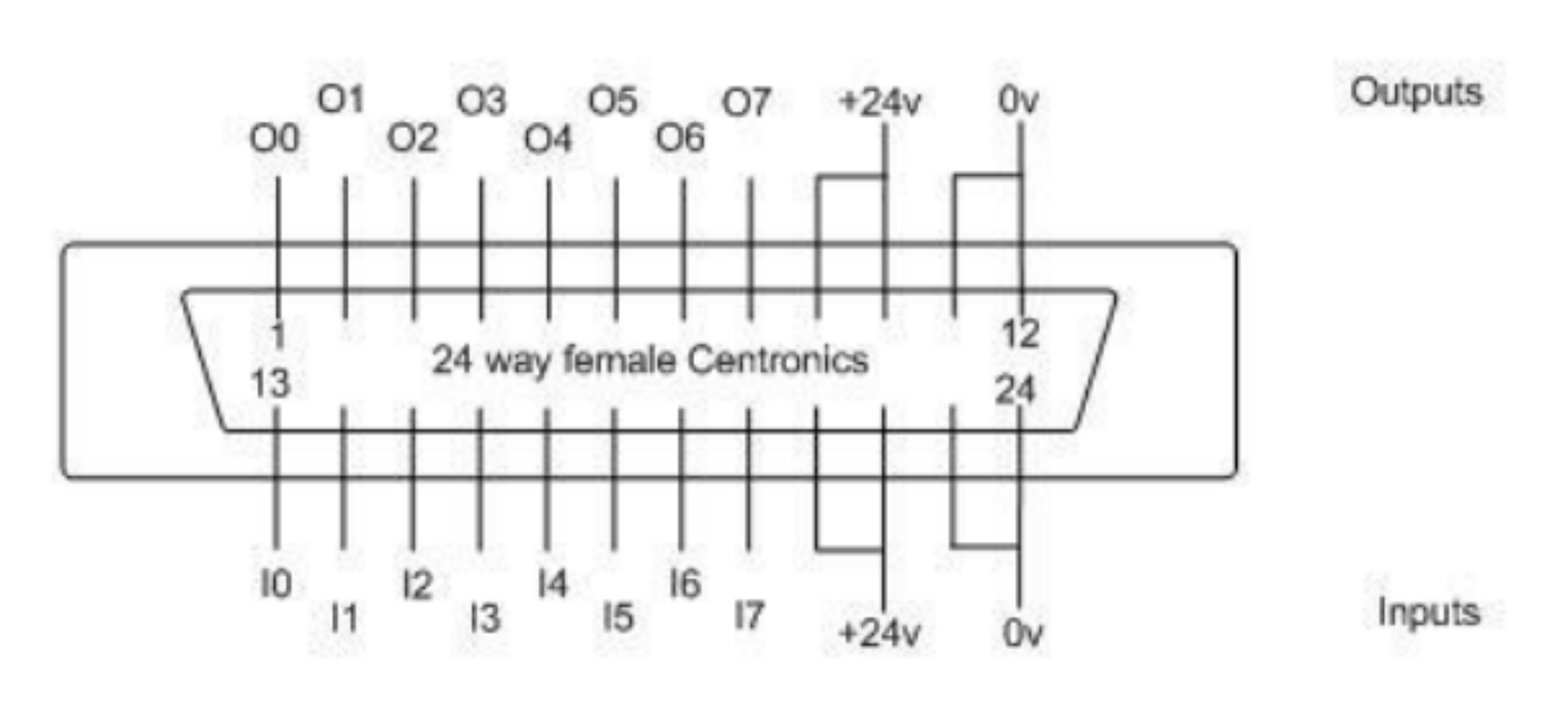
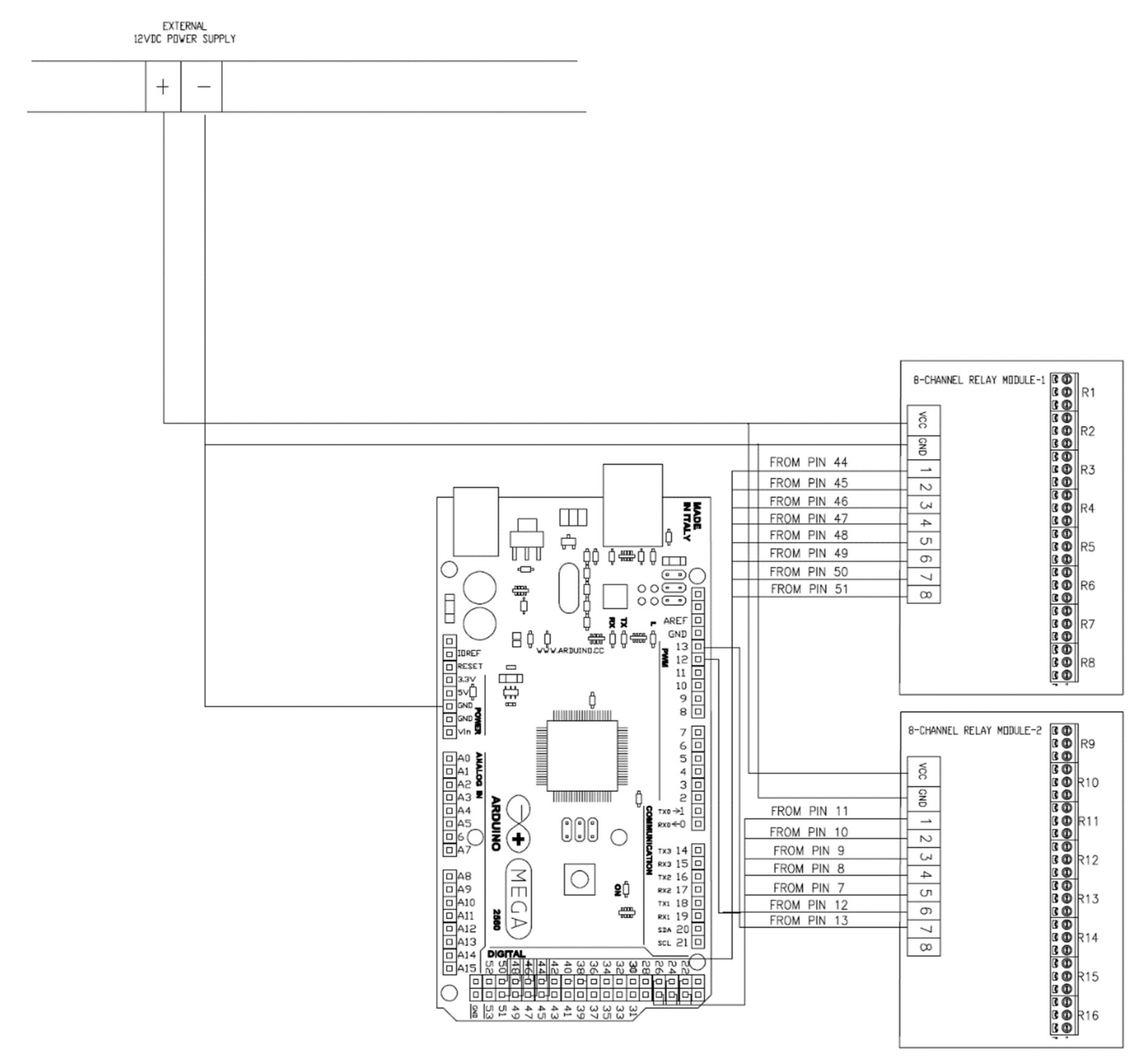
3.2. Micro-Controller and Hardware Wiring
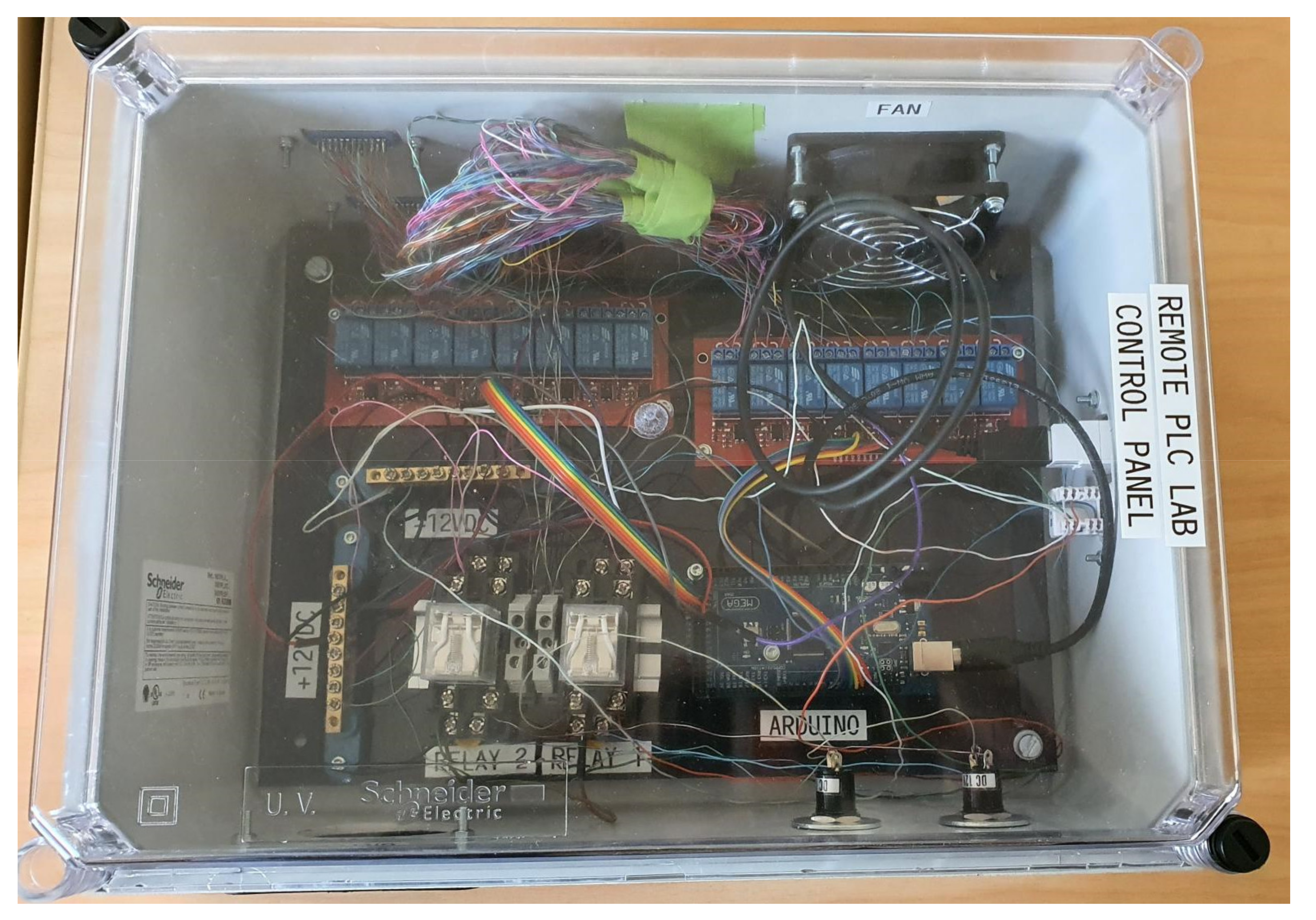
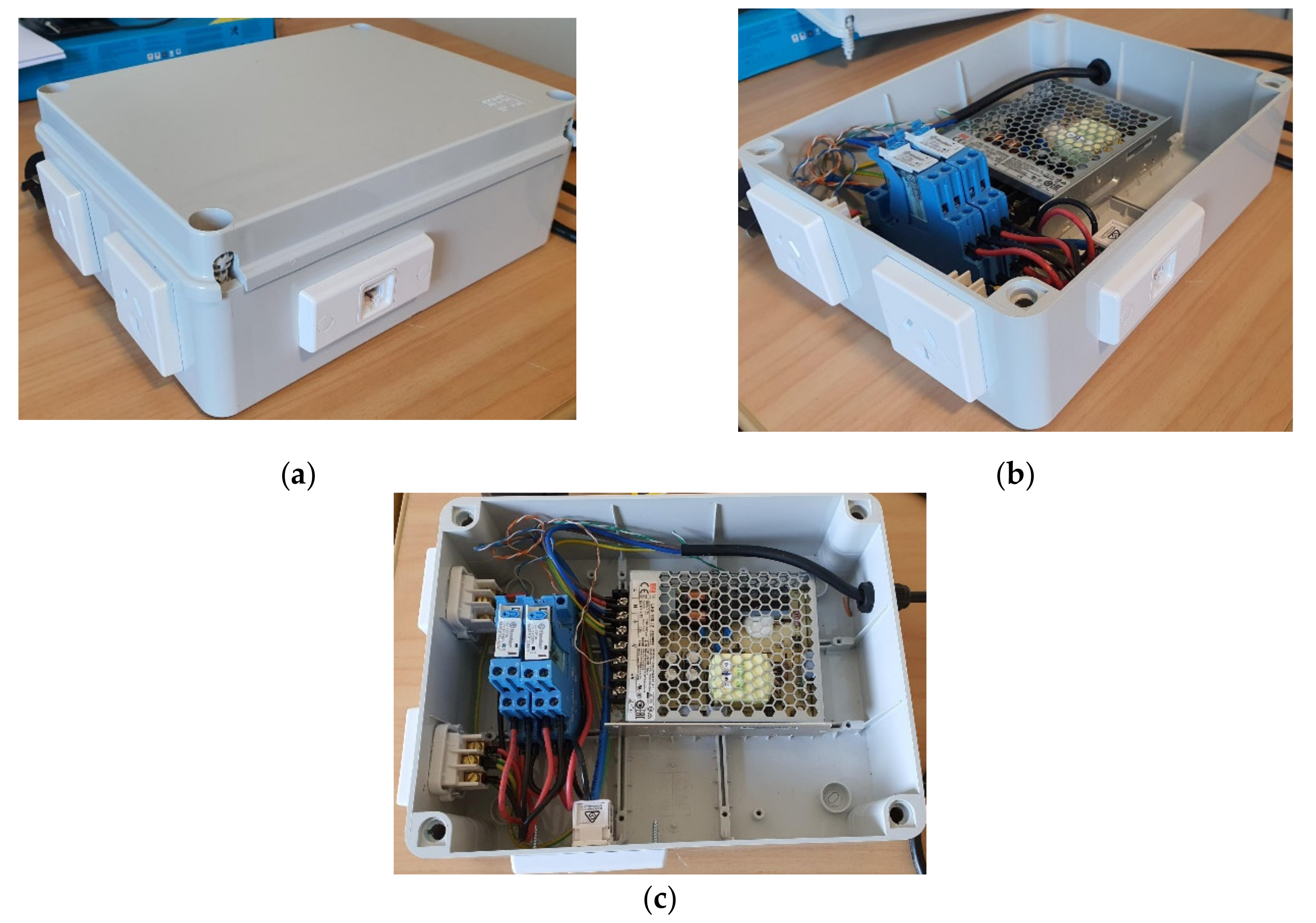
3.3. Control and Power Box Construction
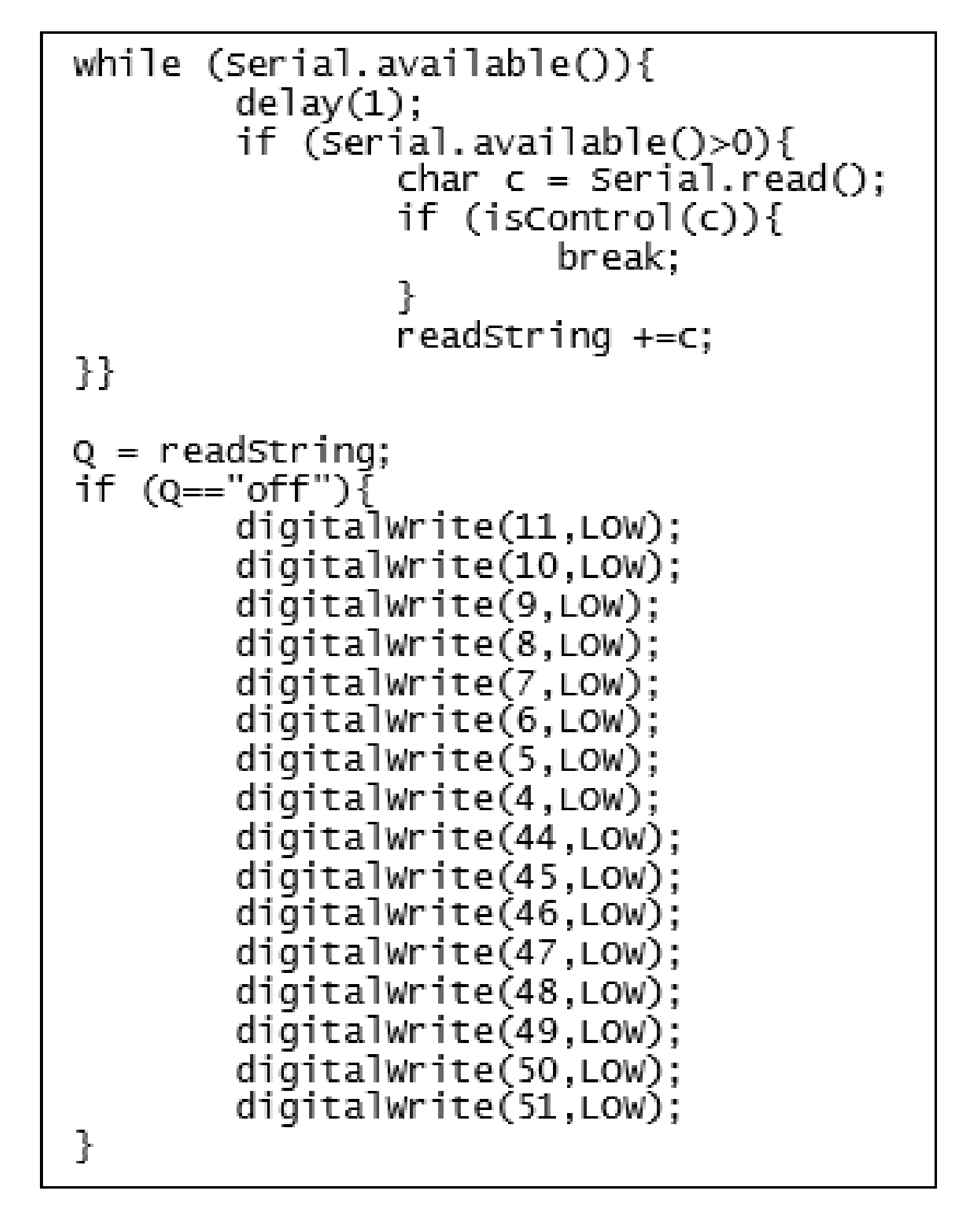
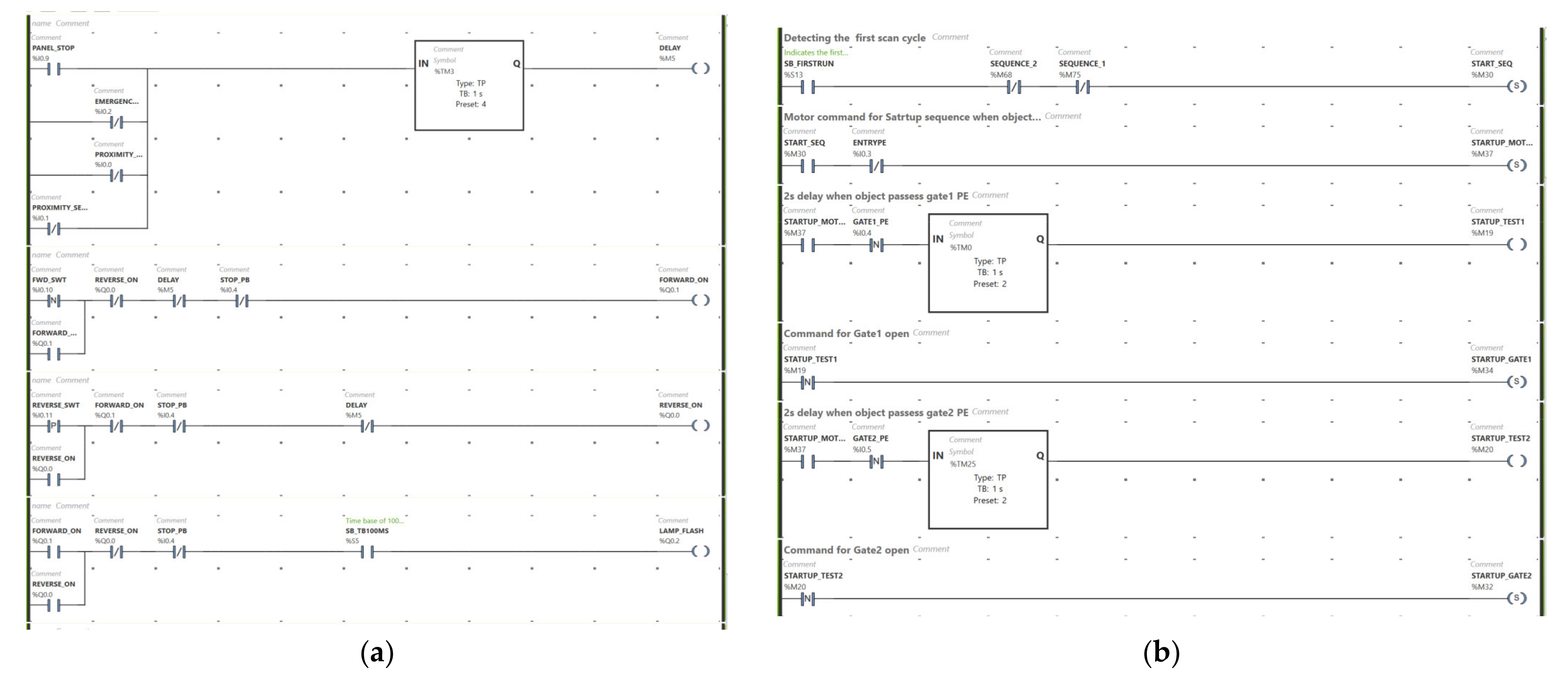
3.4. Sample PLC Programs
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chand, P.; Al-Rawi, M.; Khanna, J. Utilising Digital Assessment Strategies for Theory & Practical Work in Mechatronics. In Proceedings of the AAEE2020 Conference, Sydney, NSW, Australia, 6–9 December 2020. [Google Scholar]
- Hoult, R.D.; Miramini, S.; Lumantarna, E. Promoting effectiveness of student learning in a flipped or blended approach. In Proceedings of the AAEE2020 Conference, Sydney, NSW, Australia, 6–9 December 2020. [Google Scholar]
- Buskes, G. Disrupting a flipped classroom to become fully online. In Proceedings of the AAEE2020 Conference, Sydney, NSW, Australia, 6–9 December 2020. [Google Scholar]
- Alkhaldi, T.; Pranata, I.; Athauda, R.I. A review of contemporary virtual and remote laboratory implementations: Observations and findings. J. Comput. Educ. 2016, 3, 329–351. [Google Scholar] [CrossRef]
- Chaos, D.; Chacón, J.; Lopez-Orozco, J.A.; Dormido, S. Virtual and Remote Robotic Laboratory Using EJS, MATLAB and LabVIEW. Sensors 2013, 13, 2595–2612. [Google Scholar] [CrossRef] [PubMed]
- Marques, M.; Viegas, M.; Costa-Lobo, M.; Fidalgo, A.; Alves, G.; Rocha, J.; Gustavsson, I. How Remote Labs Impact on Course Outcomes: Various Practices Using VISIR. IEEE Trans. Educ. 2014, 57, 151–159. [Google Scholar] [CrossRef]
- Prieto-Blazquez, J.; Herrera-Joancomarti, J.; Guerrero-Roldán, A. A virtual laboratory structure for developing programming labs. Int. J. Emerg. Technol. Learn. 2009, 4, 47–52. [Google Scholar] [CrossRef] [Green Version]
- Maiti, A.; Zutin, D.G.; Wuttke, H.; Henke, K.; Maxwell, A.D.; Kist, A.A. A Framework for Analyzing and Evaluating Architectures and Control Strategies in Distributed Remote Laboratories. IEEE Trans. Learn. Technol. 2018, 11, 441–455. [Google Scholar] [CrossRef]
- Pasc, M.I.; Tarca, R.-C.; Vesselenyi, T.; Popentiu-Vladicescu, F.; Nagy, R.-B. Remote Educational System Using Virtual and Augmented Reality. In Proceedings of the 11th International Scientific Conference eLearning and Software for Education, Bucharest, Romania, 23–24 April 2015; pp. 221–228. [Google Scholar]
- García-Guzmán, F.; Villa-López, H.; Vélez-Enríquez, J.A.; García-Mathey, L.A.; Ramírez-Ramírez, A. Remote Laboratories for Teaching and Training in Engineering. In Design, Control and Applications of Mechatronic Systems in Engineering; Yildirim, S., Ed.; InTech Open: London, UK, 2017; pp. 47–63. [Google Scholar]
- De Lima, P.C.; Carlos, L.M.; Simão, J.P.S.; Pereira, J.; Mafra, P.M.; da Silva, J.B. Design and implementation of a remote lab for teaching programming and robotics. IFAC Pap. 2016, 49, 86–91. [Google Scholar] [CrossRef]
- Michalec, T.; Wojczuk, M.; Brzoza-Woch, R.; Szydło, T. Remote Programming and Reconfiguration System for Embedded Devices. In Proceedings of the 2019 Federated Conference on Computer Science and Information Systems (FedCSIS), Leipzig, Germany, 1–4 September 2019; pp. 467–470. [Google Scholar]
- Anzhelika, P.; Olga, G.; Ivanov, E.; Sokolyanskii, A.; Kurson, S. Development and application of remote laboratory for embedded systems design. In Proceedings of the 2015 12th International Conference on Remote Engineering and Virtual Instrumentation (REV), Bangkok, Thailand, 25–27 February 2015; pp. 69–73. [Google Scholar]
- OBellmunt, G.; Miracle, D.M.; Arellano, S.G.; Sumper, A.; Andreu, A.S. A distance PLC programming course employing a remote laboratory based on a flexible manufacturing cell. IEEE Trans. Educ. 2006, 49, 278–284. [Google Scholar] [CrossRef]
- Goman, V.; Fedoreev, S. Remote training of programming of PLC with embedded web server. EAI Endorsed Trans. Energy Web Inf. Technol. 2018, 5, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Palma, L.B.; Brito, V.; Rosas, J.; Gil, P. WEB PLC simulator for ST programming. In Proceedings of the 2017 4th Experiment@International Conference (exp.at’17), Faro, Portugal, 6–8 June 2017; pp. 303–308. [Google Scholar] [CrossRef]
- Shyr, W.-J.; Su, T.-J.; Lin, C.-M. Development of Remote Monitoring and a Control System Based on PLC and WebAccess for Learning Mechatronics. Int. J. Adv. Robot. Syst. 2013, 10, 97. [Google Scholar] [CrossRef] [Green Version]
- Sheng-Jen, H. Design of Remotely Accessible Automated Systems to Enhance Industrial Automation Education, Columbus, Ohio. 2017. Available online: https://peer.asee.org/27878 (accessed on 15 July 2021).
- Colak, I.; Efe, A. Design and implementation of a remote access PLC training set. In Proceedings of the International Aegean Conference on Electrical Machines and Power Electronics and Electromotion, Joint Conference, Istanbul, Turkey, 8–10 September 2011; pp. 425–429. [Google Scholar] [CrossRef]
- Mendes, M.J.G.C.; Martins, L. An internet remote laboratory to teach Industrial Automation. In Proceedings of the 2014 7th International Conference on Human System Interactions (HSI), Costa da Caparica, Portugal, 16–18 June 2014; pp. 144–149. [Google Scholar] [CrossRef]
- Chand, P.; James, S.; Antony, J.; Jose, J. Developing Remote Access and Control of Automation Equipment. In Proceedings of the 7th International Conference on Control, Automation and Robotics, Singapore, 23–25 April 2021; pp. 31–35. [Google Scholar]
- Schneider-Electric. Modicon M221 Logic Controller User Guide; Schneider Electric: Neuss, Germany, 2020. [Google Scholar]
- Drugarin, C.V.A.; Draghici, S.; Raduca, E. Team Viewer Technology for Remote Control of a Computer. Analele Universităţii Eftimie Murgu Reşiţa 2016, 23, 61–66. [Google Scholar]
- ISL-Online. REMOTE Support. Access. Work. Available online: https://www.islonline.com/nz/en/ (accessed on 5 March 2021).
- Farag, W. An Innovative Remote-Lab Framework for Educational Experimentation. Int. J. Online Biomed. Eng. 2017, 13, 68–86. [Google Scholar] [CrossRef] [Green Version]
- Strauss, D. Getting Started with Visual Studio 2019; Apress Media: Berkeley, CA, USA, 2020. [Google Scholar]
- Conrod, P.; Tylee, L. Learn Visual C#, 2019 ed.; Kidware Software: Maple Valley, WA, USA, 2019. [Google Scholar]
- Logitech. C920 HD PRO WEBCAM. Available online: https://www.logitech.com/en-nz/product/hd-pro-webcam-c920#specification-tabular (accessed on 5 March 2021).
- Currey, M. Arduino and Visual Basic Part 1: Receiving Data From the Arduino. Available online: http://www.martyncurrey.com/arduino-and-visual-basic-part-1-receiving-data-from-the-arduino/ (accessed on 5 March 2021).
- Jaycar-NZ. Duinotech MEGA 2560 r3 Board for Arduino. Available online: https://www.jaycar.co.nz/duinotech-mega-2560-r3-board-for-arduino/p/XC4420?gclid=Cj0KCQiAyoeCBhCTARIsAOfpKxig7maxgyOBNBOhqSabgkDAYnI5Z00YCs-JJonW1GSez_oHKOd7_mgaAiHOEALw_wcB (accessed on 5 March 2021).
- Schneider-Electric. Zelio Logic Smart Relay User Manual; Schneider Electric: Neuss, Germany, 2017. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pin Number | PLC Connection | FWD/REV Conveyor | Festo Sorting Machine |
|---|---|---|---|
| I0 | %I0.0 | Proximity sensor 1 | Gate 1 arm feedback |
| I1 | %I0.1 | Proximity sensor 2 | Gate 2 arm feedback |
| I2 | %I0.2 | Gate 3 arm feedback | |
| I3 | %I0.3 | Entry PE sensor | |
| I4 | %I0.4 | Gate 1 PE sensor | |
| I5 | %I0.5 | Gate 2 PE sensor | |
| I6 | %I0.6 | Gate 3 PE sensor | |
| I7 | %I0.7 | Gate 4 PE sensor | |
| O0 | %Q0.0 | Reverse on | Conveyor motor |
| O1 | %Q0.1 | Forward on | Gate 1 solenoid |
| O2 | %Q0.2 | Indicator lamp 1 | Gate 2 solenoid |
| O3 | %Q0.3 | Gate 3 solenoid | |
| O4 | %Q0.4 | Indicator lamp 2 | Indicator lamp |
| Item/Part | Quantity | Total Cost (NZD) |
|---|---|---|
| Duinotech MEGA 2560 r3 micro-controller | 1 | 69.90 |
| 8-channel relay modules | 2 | 49.80 |
| Logitech C920 HD Pro web camera | 1 | 180.00 |
| ABS plastic cases | 2 | 100.00 |
| GPO power sockets | 2 | 15.00 |
| Ventilation fan kit | 1 | 40.00 |
| 12 V 25 W Power supply | 1 | 27.90 |
| 12 V 8A DPDT relays and base | 2 | 44.24 |
| Wires and other consumables (micro-controller jumper cables, Centronics cable and connectors, indicator lamps, USB socket, DC power cables/sockets) | Misc. | 120.00 |
| Grand Total | 646.84 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chand, P.; Al-Rawi, M.; James, S.; Antony, J.; Jose, J. A Low-Cost System for Remote Access and Control of Automation Equipment. Machines 2021, 9, 138. https://doi.org/10.3390/machines9070138
Chand P, Al-Rawi M, James S, Antony J, Jose J. A Low-Cost System for Remote Access and Control of Automation Equipment. Machines. 2021; 9(7):138. https://doi.org/10.3390/machines9070138
Chicago/Turabian StyleChand, Praneel, Mohammad Al-Rawi, Sebin James, Joseph Antony, and Jobin Jose. 2021. "A Low-Cost System for Remote Access and Control of Automation Equipment" Machines 9, no. 7: 138. https://doi.org/10.3390/machines9070138