Reliability-Based Robust Design Optimization with Fourth-Moment Method for Ball Bearing Wear


Abstract
:1. Introduction
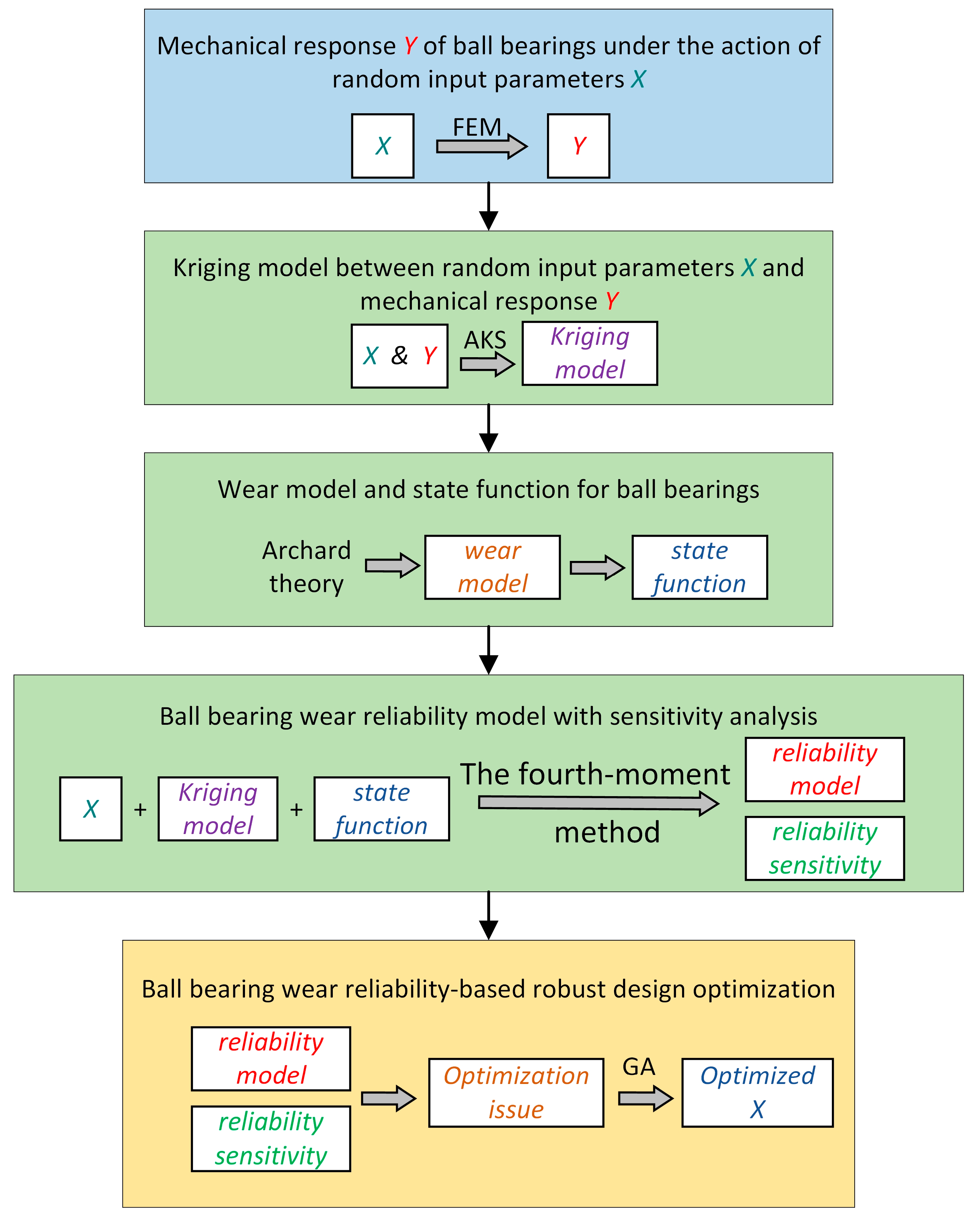
2. Materials and Methods
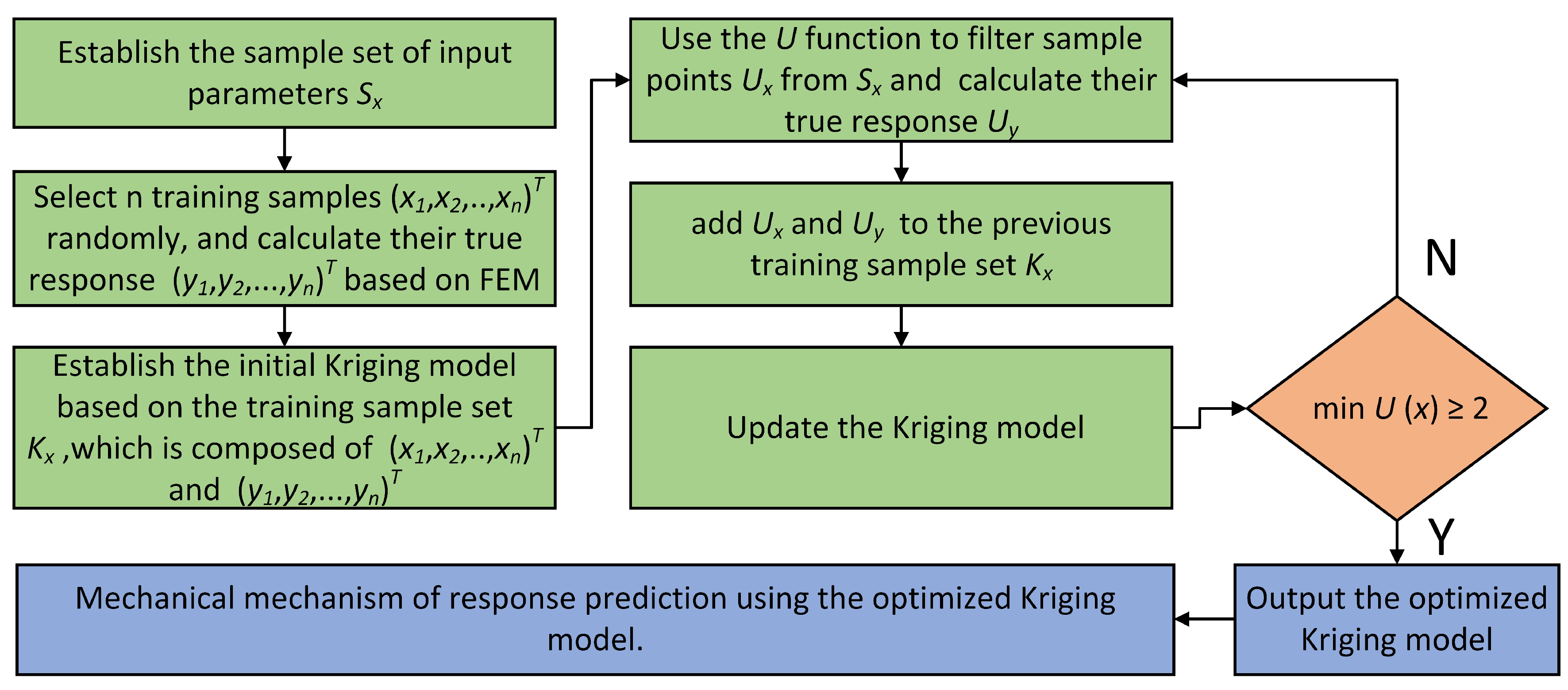
2.1. Kriging Surrogate Model of Mechanical Structural Response Based on FEM
2.2. Wear Reliability Model of Rolling Ball Bearing
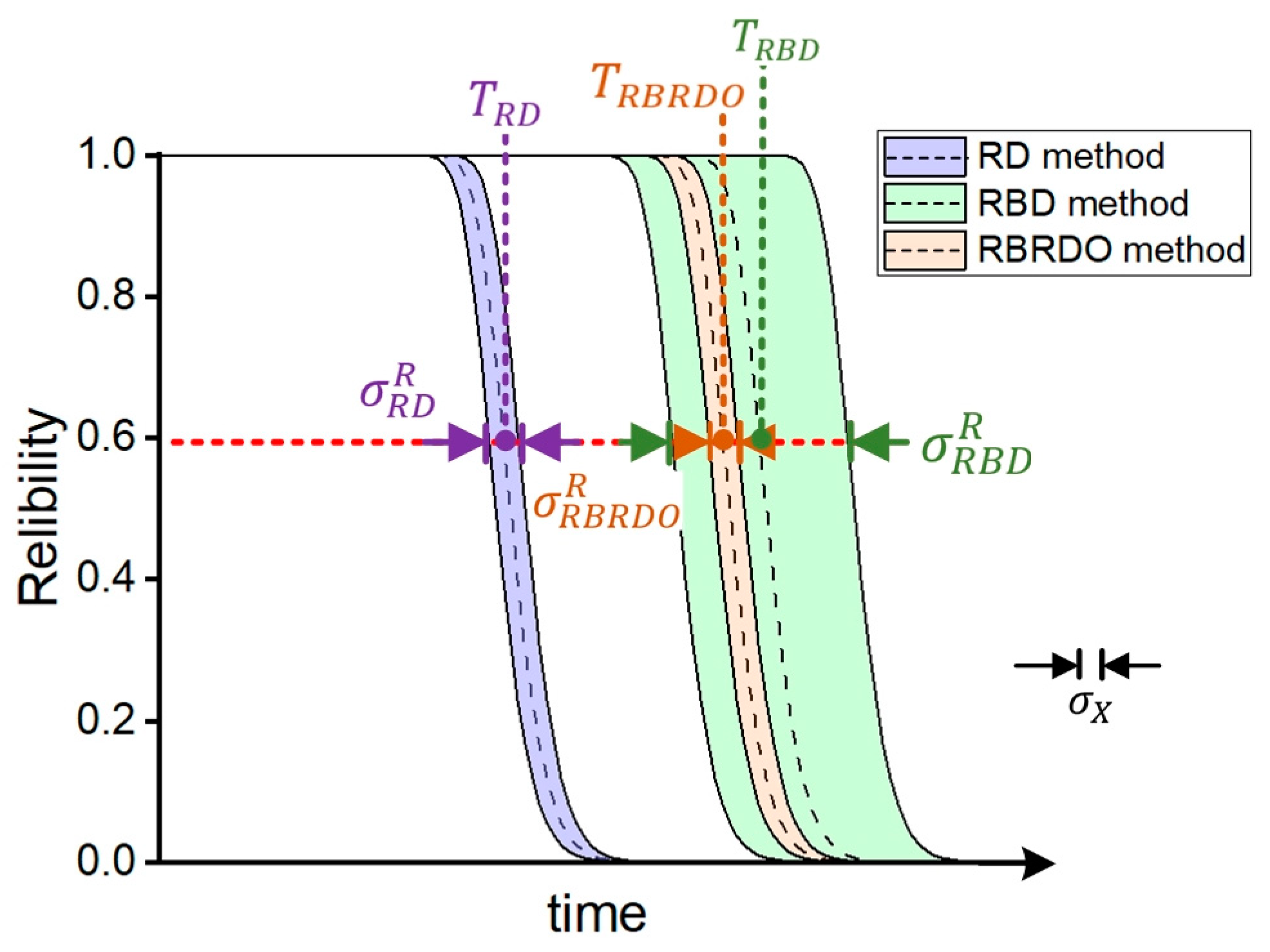
2.3. Sensitivity Analysis and Reliability-Based Robust Design
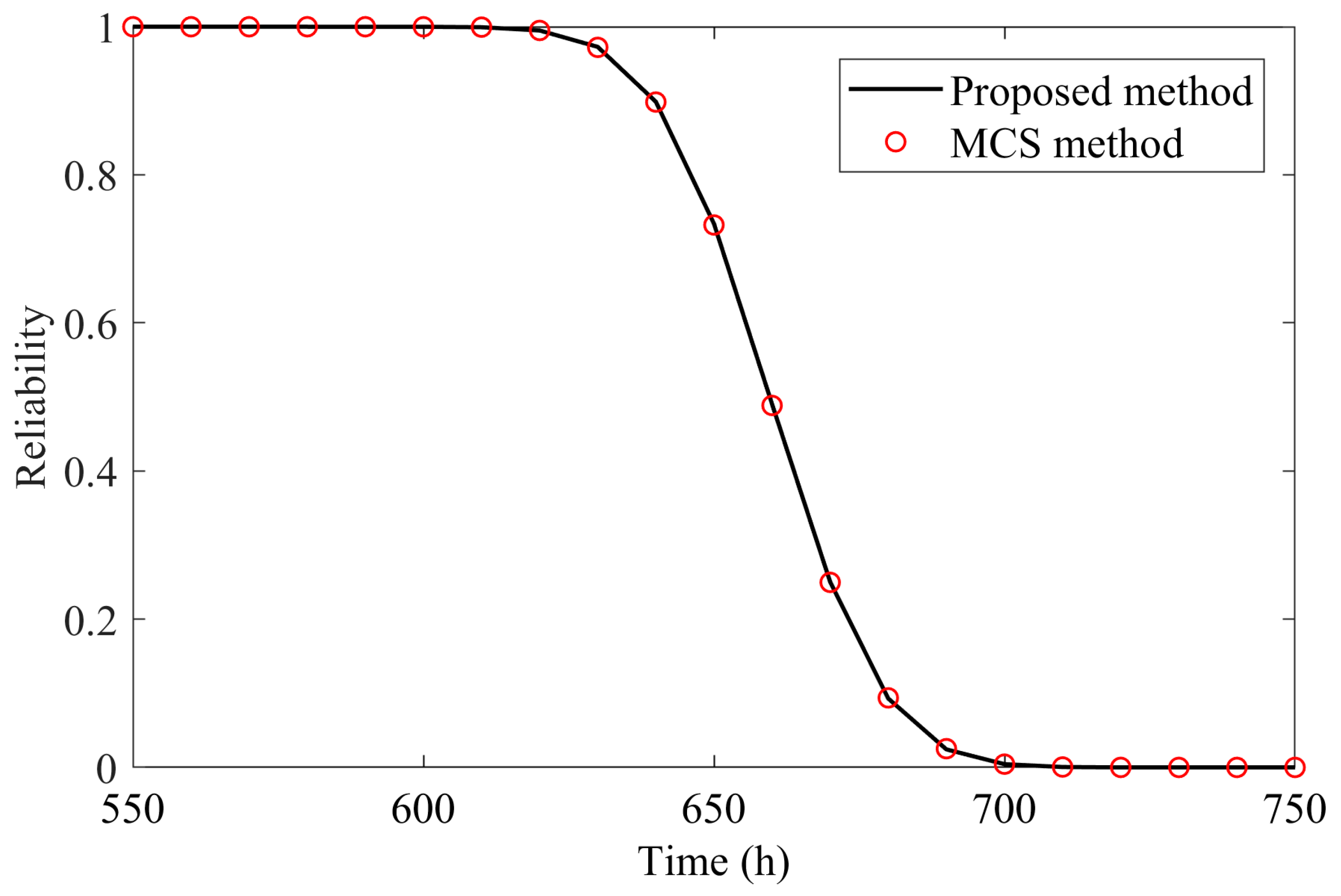
3. Results
- The wear reliability target for ball bearings is set to , which means that the optimized reliability result obtained at the moment should be no less than . Therefore, the reliability constraint is expressed as follows:
- In order to ensure the point contact between the inner/outer raceway and the balls, the inner/outer raceway radius should be larger than the ball radius , and the inner raceway radius is usually larger than the outer raceway radius . According to the above principles to establish constraints as follows:
- Based on the structural design requirements of ball bearings and with reference to the various dimensional standards for ball bearings [46], the initial value constraints are established for the input parameters as follows:
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Weibull, W. Efficient Methods for Estimating Fatigue Life Distribution of Rolling Bearings; Elsevier: New York, NY, USA, 1962; pp. 252–265. [Google Scholar]
- Lundberg, G.; Palmgren, A. Dynamic capacity of rolling bearings. J. Appl. Mech. 1949, 16, 165–172. [Google Scholar] [CrossRef]
- Organización Internacional de Normalización. Rolling Bearings: Dynamic Load Ratings and Rating Life; ISO: Geneva, Switzerland, 2007. [Google Scholar]
- Ding, N.; Yan, S.; Ma, G.; Li, H.; Jiang, D. Mixed thermo-elasto-hydrodynamic lubrication and wear coupling simulation analysis for dynamical load journal bearings. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2023, 237, 6020–6041. [Google Scholar] [CrossRef]
- Wang, X.; Wang, B.; Chang, M.; Li, L. Reliability and sensitivity analysis for bearings considering the correlation of multiple failure modes by mixed Copula function. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2019, 234, 15–26. [Google Scholar] [CrossRef]
- Li, X.; Yan, K.; Lv, Y.; Yan, B.; Dong, L.; Hong, J. Study on the influence of machine tool spindle radial error motion resulted from bearing outer ring tilting assembly. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 3246–3258. [Google Scholar] [CrossRef]
- Zhang, T.; He, D. An improved high-order statistical moment method for structural reliability analysis with insufficient data. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2017, 232, 1050–1056. [Google Scholar] [CrossRef]
- Li, Z.; Tian, G.; Cheng, G.; Liu, H.; Cheng, Z. An integrated cultural particle swarm algorithm for multi-objective reliability-based design optimization. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2013, 228, 1185–1196. [Google Scholar] [CrossRef]
- Gao, Y.; Zhang, F.; Li, Y. Reliability optimization design of a planar multi-body system with two clearance joints based on reliability sensitivity analysis. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 233, 1369–1382. [Google Scholar] [CrossRef]
- E, S.; Wang, Y.; Xie, B.; Lu, F. A Reliability-Based Robust Design Optimization Method for Rolling Bearing Fatigue under Cyclic Load Spectrum. Mathematics 2023, 11, 2843. [Google Scholar] [CrossRef]
- Winkler, A.; Marian, M.; Tremmel, S.; Wartzack, S. Numerical modeling of wear in a thrust roller bearing under mixed elastohydrodynamic lubrication. Lubricants 2020, 8, 58. [Google Scholar] [CrossRef]
- Pozzebon, M.L.; Lin, C.; Meehan, P.A. On the modeling of wear in grease-lubricated spherical roller bearings. Tribol. Trans. 2020, 63, 806–819. [Google Scholar] [CrossRef]
- Zhao, Y.; Lu, Z.; Ono, T. A simple third-moment method for structural reliability. J. Asian Archit. Build. Eng. 2006, 5, 129–136. [Google Scholar] [CrossRef]
- Zhao, Y.; Ono, T. Moment methods for structural reliability. Struct. Saf. 2001, 23, 47–75. [Google Scholar] [CrossRef]
- Clark, D.L., Jr.; Bae, H.; Forster, E.E. Gaussian Surrogate Dimension Reduction for Efficient Reliability-Based Design Optimization. AIAA J. 2020, 58, 4736–4750. [Google Scholar] [CrossRef]
- Lee, I.; Choi, K.K.; Du, L.; Gorsich, D. Dimension reduction method for reliability-based robust design optimization. Comput. Struct. 2008, 86, 1550–1562. [Google Scholar] [CrossRef]
- Dauparas, J.; Anishchenko, I.; Bennett, N.; Bai, H.; Ragotte, R.J.; Milles, L.F.; Wicky, B.I.; Courbet, A.; de Haas, R.J.; Bethel, N.; et al. Robust deep learning--based protein sequence design using ProteinMPNN. Science 2022, 378, 49–56. [Google Scholar] [CrossRef] [PubMed]
- Park, G.; Lee, T.; Lee, K.H.; Hwang, K. Robust design: An overview. AIAA J. 2006, 44, 181–191. [Google Scholar] [CrossRef]
- Lee, D.; Jahanbin, R.; Rahman, S. Robust design optimization by spline dimensional decomposition. Probabilistic Eng. Mech. 2022, 68, 103218. [Google Scholar] [CrossRef]
- Park, J.; Yoo, D.; Moon, J.; Yoon, J.; Park, J.; Lee, S.; Lee, D.; Kim, C. Reliability-Based Robust Design Optimization of Lithium-Ion Battery Cells for Maximizing the Energy Density by Increasing Reliability and Robustness. Energies 2021, 14, 6236. [Google Scholar] [CrossRef]
- Yu, S.; Wang, Z.; Wang, Z. Time-dependent reliability-based robust design optimization using evolutionary algorithm. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part B Mech. Eng. 2019, 5, 20911. [Google Scholar] [CrossRef]
- Gong, C.; Frangopol, D.M. An efficient time-dependent reliability method. Struct. Saf. 2019, 81, 101864. [Google Scholar] [CrossRef]
- Yang, W.; Zhang, B.; Wang, W.; Li, C. Time-dependent structural reliability under nonstationary and non-Gaussian processes. Struct. Saf. 2023, 100, 102286. [Google Scholar] [CrossRef]
- Doltsinis, I.; Kang, Z. Robust design of structures using optimization methods. Comput. Meth. Appl. Mech. Eng. 2004, 193, 2221–2237. [Google Scholar] [CrossRef]
- Zhang, T. An improved high-moment method for reliability analysis. Struct. Multidiscip. Optim. 2017, 56, 1225–1232. [Google Scholar] [CrossRef]
- Zhang, T. Robust reliability-based optimization with a moment method for hydraulic pump sealing design. Struct. Multidiscip. Optim. 2018, 58, 1737–1750. [Google Scholar] [CrossRef]
- Zhang, T.; He, D. A Reliability-Based Robust Design Method for the Sealing of Slipper-Swash Plate Friction Pair in Hydraulic Piston Pump. IEEE Trans. Reliab. 2018, 67, 459–469. [Google Scholar] [CrossRef]
- Ant O Nio, C.C.C.C.; Hoffbauer, L.I.S.N. An approach for reliability-based robust design optimisation of angle-ply composites. Compos. Struct. 2009, 90, 53–59. [Google Scholar] [CrossRef]
- Dammak, K.; El Hami, A. Thermal reliability-based design optimization using Kriging model of PCM based pin fin heat sink. Int. J. Heat Mass Transf. 2021, 166, 120745. [Google Scholar] [CrossRef]
- Tripathy, R.K.; Bilionis, I. Deep UQ: Learning deep neural network surrogate models for high dimensional uncertainty quantification. J. Comput. Phys. 2018, 375, 565–588. [Google Scholar] [CrossRef]
- White, D.A.; Arrighi, W.J.; Kudo, J.; Watts, S.E. Multiscale topology optimization using neural network surrogate models. Comput. Meth. Appl. Mech. Eng. 2019, 346, 1118–1135. [Google Scholar] [CrossRef]
- Allaix, D.L.; Carbone, V.I. An improvement of the response surface method. Struct. Saf. 2011, 33, 165–172. [Google Scholar] [CrossRef]
- Zhang, D.; Han, X.; Jiang, C.; Liu, J.; Li, Q. Time-dependent reliability analysis through response surface method. J. Mech. Des. 2017, 139, 41404. [Google Scholar] [CrossRef]
- Jeong, S.; Murayama, M.; Yamamoto, K. Efficient optimization design method using kriging model. J. Aircr. 2005, 42, 413–420. [Google Scholar] [CrossRef]
- Lu, C.; Feng, Y.; Fei, C.; Bu, S. Improved decomposed-coordinated kriging modeling strategy for dynamic probabilistic analysis of multicomponent structures. IEEE Trans. Reliab. 2019, 69, 440–457. [Google Scholar] [CrossRef]
- Keshtegar, B.; Mert, C.; Kisi, O. Comparison of four heuristic regression techniques in solar radiation modeling: Kriging method vs RSM, MARS and M5 model tree. Renew. Sustain. Energy Rev. 2018, 81, 330–341. [Google Scholar] [CrossRef]
- Jiang, Z.; Wu, J.; Huang, F.; Lv, Y.; Wan, L. A novel adaptive Kriging method: Time-dependent reliability-based robust design optimization and case study. Comput. Ind. Eng. 2021, 162, 107692. [Google Scholar] [CrossRef]
- Echard, B.; Gayton, N.; Lemaire, M. AK-MCS: An active learning reliability method combining Kriging and Monte Carlo simulation. Struct. Saf. 2011, 33, 145–154. [Google Scholar] [CrossRef]
- Liu, H.; Li, S.; Huang, X. Adaptive surrogate model coupled with stochastic configuration network strategies for time-dependent reliability assessment. Probabilistic Eng. Mech. 2023, 71, 103406. [Google Scholar] [CrossRef]
- Archard, J.F.; Hirst, W. The wear of metals under unlubricated conditions. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1956, 236, 397–410. [Google Scholar]
- GB/T 25769-2010; Rolling Bearings—Measuring Methods for Radial Internal Clearance. Standards Press of China: Beijing, China, 2010.
- GB/T 4604.1-2012; Rolling Bearings—Internal Clearance—Part 1: Radial Internal Clearance for Radial Bearings. Standards Press of China: Beijing, China, 2012.
- Chakraborty, S.; Das, S.; Tesfamariam, S. Robust design optimization of nonlinear energy sink under random system parameters. Probabilistic Eng. Mech. 2021, 65, 103139. [Google Scholar] [CrossRef]
- Pellizzari, F.; Marano, G.C.; Palmeri, A.; Greco, R.; Domaneschi, M. Robust optimization of MTMD systems for the control of vibrations. Probabilistic Eng. Mech. 2022, 70, 103347. [Google Scholar] [CrossRef]
- Zhang, T. Matrix description of differential relations of moment functions in structural reliability sensitivity analysis. Appl. Math. Mech. 2017, 38, 57–72. [Google Scholar] [CrossRef]
- Zhang, S. Latest Bearing Manuals; Publishing House of Electronics Industry: Beijing, China, 2007. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inner Diameter (mm) | Radial Clearance (mm) | Axial Clearance (mm) |
|---|---|---|
| <30 | 4D/1000 | 0.2 |
| 35~70 | 3.5D/1000 | 0.3 |
| 75~100 | 3D/1000 | 0.3 |
| >100 | <0.3 | 0.3 |
| Bearing Parameters | Mean | Variance | Skewness | Kurtosis |
|---|---|---|---|---|
| Center circle diameter (mm) | 102.4874 | 2.5 × 10−5 | 9.96 × 10−2 | 2.87 |
| Ball diameter (mm) | 13.4940 | 4.0 × 10−6 | 4.09 × 10−2 | 2.96 |
| Inner ring groove radius | 7.1010 | 1.0 × 10−6 | −7.37 × 10−2 | 3.03 |
| Outer ring groove radius (mm) | 6.9960 | 1.0 × 10−6 | 1.29 × 10−1 | 2.69 |
| Elastic modulus (GPa) | 208 | 1.0 × 10−4 | −1.88 × 10−4 | 3.47 |
| Poisson’s ratio | 0.3 | 1.0 × 10−8 | −1.53 × 10−1 | 2.85 |
| Hardness | 200 | 1.0 × 10−4 | 8.35 × 10−2 | 2.88 |
| Initial radial clearance | 0.0240 | 2.5 × 10−5 | 6.46 × 10−2 | 2.92 |
| Methods | Relative Error | |||
|---|---|---|---|---|
| FOSM method | 635 h | −1.6567 | 95.12% | 0.7521% |
| The proposed method | 635 h | −1.5985 | 94.50% | 0.0953% |
| MCS method | 635 h | \ | 94.41% | \ |
| Input Parameters | Reliability Sensitivity | Sensitivity Gradient | |
|---|---|---|---|
| Center circle diameter | 0.0037 | −1.06 × 10−6 | 40.4176 |
| Ball diameter | 2.2782 | −0.1616 | |
| Inner ring groove radius | −1.1763 | −0.0215 | |
| Outer ring groove radius | −4.4164 | −0.3036 | |
| Elastic modulus | −0.0028 | −1.21 × 10−6 | |
| Poisson’s ratio | −0.3828 | −2.28 × 10−4 | |
| Hardness | −0.0283 | −1.25 × 10−4 | |
| Initial radial clearance | 20.9554 | −34.1776 | |
| Input Parameters | Before Optimization | After Optimization |
|---|---|---|
| Center circle diameter (mm) | 102.4874 | 102.4306 |
| Ball diameter (mm) | 13.4940 | 13.4501 |
| Inner ring groove radius | 7.1010 | 7.1499 |
| Outer ring groove radius (mm) | 6.9960 | 7.05 |
| Elastic modulus (GPa) | 208 | 208.0212 |
| Poisson’s ratio | 0.3 | 0.3497 |
| Hardness | 200 | 201.9952 |
| Initial radial clearance | 0.0240 | 0.0235 |
| Input Parameters | ||||
|---|---|---|---|---|
| Before optimization | 635 h | −1.5985 | 94.50% | 40.4176 |
| After optimization | 635 h | −5.5483 | 99.99% | 8.4755 × 10−5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; E, S.; Yang, K.; Xie, B.; Lu, F. Reliability-Based Robust Design Optimization with Fourth-Moment Method for Ball Bearing Wear. Lubricants 2024, 12, 293. https://doi.org/10.3390/lubricants12080293
Wang Y, E S, Yang K, Xie B, Lu F. Reliability-Based Robust Design Optimization with Fourth-Moment Method for Ball Bearing Wear. Lubricants. 2024; 12(8):293. https://doi.org/10.3390/lubricants12080293
Chicago/Turabian StyleWang, Yanzhong, Shiyuan E, Kai Yang, Bin Xie, and Fengxia Lu. 2024. "Reliability-Based Robust Design Optimization with Fourth-Moment Method for Ball Bearing Wear" Lubricants 12, no. 8: 293. https://doi.org/10.3390/lubricants12080293