1. Introduction
Understanding frictional forces and thus energy dissipation between two sliding bodies is a central task of tribology. The Prandtl model is arguably the simplest and most generic non-linear model explaining why and how energy dissipates microscopically [
1,
2,
3]. It consists of a mass point, which is dragged by a spring of stiffness
k past a corrugated potential and subjected to a Stokesian drag force as well as to thermal fluctuations. When
k is less than the maximum curvature of the potential
, instabilities occur and friction has a finite zero-velocity limit in the absence of thermal noise, consistent with Coulomb’s law of friction. When thermal fluctuations are minor and velocities are intermediate, the dependence of friction on velocity can be rather weak, again consistent with the observations going back to Coulomb [
4], who never claimed solid friction to be completely independent of velocity. However, if the reduced spring stiffness
and/or when the thermal energy
is finite, the dependence of the friction force
F on velocity
v is Stokesian at small
v but usually much enhanced compared to that caused by the artificially added damping term.
The Prandtl model—while having been mistakenly attributed to Tomlinson, see the interesting summary by Popov and Gehrt [
3] preceding their translation of Prandtl’s original work—received a revival when it was realized that the model (sometimes with minor modifications) can quantitatively describe friction and stick–slip dynamics as measured in atomic-force-microscope experiments [
5,
6,
7,
8,
9,
10]. This includes the transition between stick–slip motion [
11] and structural lubricity [
12] upon a decrease of load, i.e., the regime where solid friction turns into viscous friction. The relevance of the Prandtl model to fluid rheology remained nevertheless relatively unexplored, despite few exceptions [
13,
14]. This is surprising in light of Prandtl’s comment that
we obtain the complete transition from solid bodies to liquids of low viscosity including all states of softening in between. (Here, and in the following, quotations set in italic refer to the excellent English translation by Popov and Gray [
3] rather than to the original German.) Moreover, Prandtl expected viscosity
to increase (
only approximately) exponentially with pressure
p, in agreement with the so-called Barus equation, its generalizations, and more recent experiments [
14,
15,
16] as well as molecular simulations [
17].
Simple microscopic models describing shear-thinning in non-Newtonian liquids properly are scarce if existent at all. The most standard model, which could be called semi-phenomenological, is the Eyring model [
14,
16,
18,
19], which assumes the existence of a single energy barrier opposing (lateral) motion of an atom when a fluid is sheared. The Eyring model arises as the limiting
case of the Prandtl model. The dependence of (excess) viscosity
on shear rate
in the Eyring model is given by
where
is the equilibrium (excess) viscosity and
a characteristic shear rate near which friction crosses over from a linear, fluid-like to a quasi-logarithmic, solid-like dependence on velocity. The term “excess” is meant to indicate that experimental results on “full” viscosities, i.e., ratios of shear stresses and shear rates, are often fit to equations of the form
. In the following, the contribution
is ignored and we content ourselves with the comment that a related term arises in the Prandtl model when an explicit Stokesian damping acts between the mass point and the substrate.
While many liquids follow Eyring’s model at small temperatures or high pressure, a variety of phenomenological models are used in practice that assume a different functional dependence of viscosity on shear rate from Eyring. One such equation, which contains many other models as limiting cases, is the Carreau–Yasuda (CY) equation [
20,
21,
22]
where
n and
a are dimensionless parameters. For example, the CY model reduces to the Carreau model for
, whereas the friction–shear rate dependence becomes logarithmic-like at large shear rates, as in the Eyring model, when
n approaches zero from above. For
, viscosity is an algebraic function of shear rate,
, so that shear stress increases sub-linearly with
with an exponent
.
One drawback of the CY equation is that it cannot be asymptotically correct for very small velocities, except in the
limit of the Carreau equation. The reason is that any rigorous, perturbation-theory approach to the finite-temperature statistical mechanics of sheared, originally isotropic liquids, in which the sliding velocity or shear rate is taken as small parameter, can only lead to a shear stress that can be expanded as odd powers of the shear rate. Such an expansion would hold up to the point at which the sheared liquid undergoes a (macroscopic) discontinuous change, whereby analyticity is destroyed. Consequently, it should be generally possible to express the effective viscosity as a Taylor series expansion in even powers of
, at least until a shear-driven thermodynamic phase transformation or another collective, symmetry-breaking phenomena occurs. The Eyring model obeys this principle, since the r.h.s. of Equation (
1) can be expanded into even powers of
. The predicted friction–velocity relations can be systematically improved by adding further odd-power
terms, as shown in the context of the Prandtl model [
13]. However, in preparing this work it was found that convergence tends to be slow in such an
expansion.
Although the CY equation violates elementary symmetry considerations, it certainly provides a quite reasonable description of many experiments, most notably those on polystyrene by Yasuda [
21], which prompted Yasuda to generalize the Carreau equation; the data are reprinted (Figure 4.1-3) in the classical book by Bird, Armstrong, and Hassager on the dynamics of polymeric liquids [
22]. An interesting aspects of the original results is that they are best described with the exponents
and
. It means that, on the one hand, the experimental data show an almost Eyring/logarithmic-like dependence of shear stress at intermediate sliding velocities since
is much closer to zero than to unity. On the other hand, the parameter
a clearly differs from the value of two in violation of a leading-order
dependence. which would be consistent with perturbation theory or Eyring.
The initial motivation for the current study was to address the question of whether simulations can reproduce experimental results that appear to violate elementary symmetry considerations and to analyze the system with high precision at exceedingly small shear rates within the linear-response regime. Such a study will also implicitly address the question of how a shear-stress dependent effective (free) energy barrier
, which is defined through the equation
depends on shear stress
. Generally speaking, the leading-order correction to
any finite-temperature free-energy barrier
, including those opposing a chemical reaction, to an external stress can only be an analytical function in the stress tensor invariants, e.g., the hydrostatic pressure
p and the deviatoric stress tensor invariant, which can be associated with the square of the shear stress. Thus, tensile stress
can change
in leading linear order, since it couples linearly to the hydrostatic pressure, but the leading-order correction to
can only be quadratic in shear stress except at zero temperature, where analyticity does not necessarily hold. In addition, the notion of an activation volume when expressing the seemingly linear reduction of a finite-temperature free-energy barrier with respect to shear stress appears particularly troublesome as a (Lagrangian) shear strain leaves the volume unchanged.
The symmetry arguments on free-energy barriers appear to be in conflict with the assumption of an athermal energy barrier
that decreases linearly rather than quadratically with shear stress and which is used in transition-state theory [
14]. A similar comment applies to other energy barriers that can be reduced by shear stress, such as those opposing chemical reactions. Strong support for a linear reduction of activation energies comes from the shear-stress assisted decomposition of zinc-phosphate based anti-wear additives immersed in sheared, highly viscous lubricants [
23].
To study the conditions if/when free-energy barriers depend linearly or quadratically on shear stress, very high-precision, effective viscosities are required at small shear rates. Computing them in explicit many-atom simulations with sufficient precision might require unfeasible computing times even for model substances as simple as liquid Lennard–Jonesium. It was therefore decided to investigate the Prandtl model. Discovering that and rationalizing why it mimics the shear thinning of real liquids—which we now consider the main message of this paper—was a coincidental byproduct of the attempt to reconcile symmetry arguments with empirical evidence.
A frequent advantage of studying simple systems is that some of the gained insights apply to a broader context than simulations of just one specific substance. This happens when the description of complex, seemingly unrelated systems simplifies to the same unifying model after abstracting the effects of irrelevant degrees of freedom into a thermostat. Thus, liquids with rheological responses as distinct as those of polystyrene and camel’s blood may be describable by the same, simple model. This simplification is particularly/only useful, if it allows questions such as why increasing the pressure of an ordinary liquid or decreasing the stiffness of red blood cells leads to a decrease of the exponent n in the CY model to be answered.
The remainder of this article is organized as follows:
Section 2 presents the investigated model, some theory as well as a brief discussion of the numerical methods used.
Section 3 contains the results. Conclusions are drawn in
Section 4.
3. Results
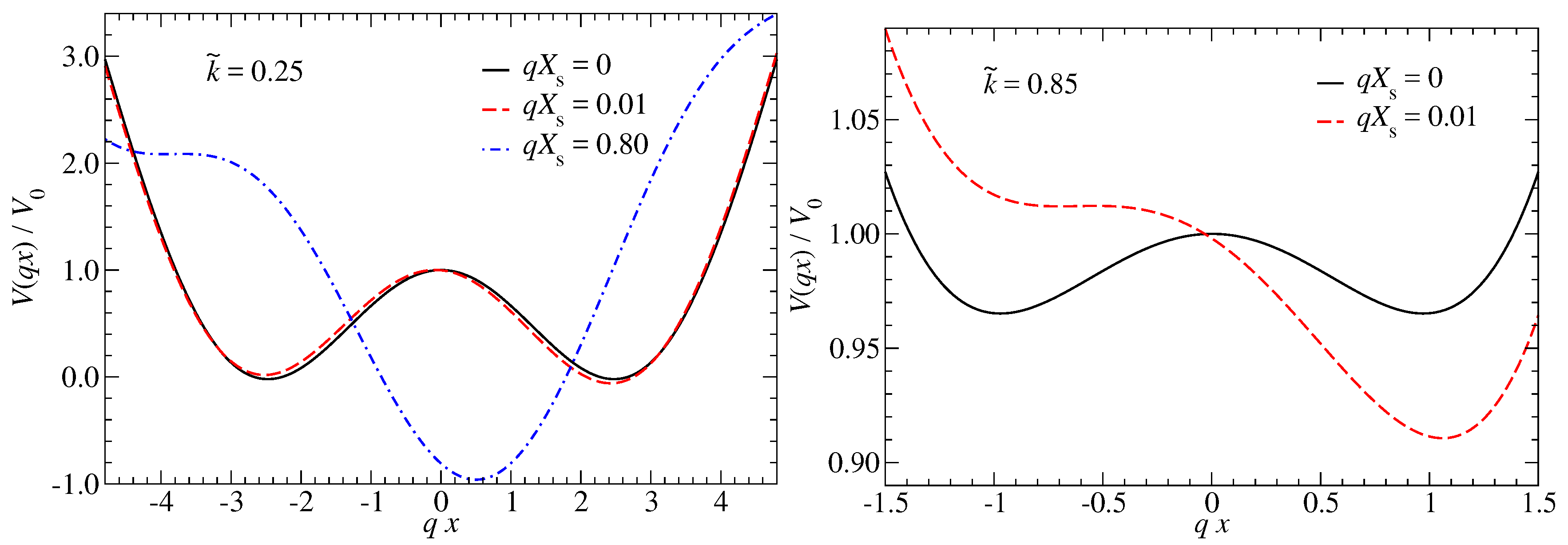
The overdamped Prandtl model is characterized by three dimensionless parameters, namely , , and , when , and q are chosen to define units. This is why it is not possible to graphically represent all possible dependencies of the kinetic friction force or of the effective damping constant, defined () in a single figure. Therefore, we focus on (or rather ) relation for mainly two reduced spring stiffnesses, one being significantly less than unity, the other being close to it and vary driving velocity as well as temperature.
For the reduced mass, two options are considered. In one case, it is formally set to infinity, while keeping fixed, which leads to overdamped or Brownian dynamics. It is more easily solved than Langevin dynamics. In the other case, the mass is set such that the dynamics are slightly underdamped. This appears to be the most reasonable approximation for an atomistic interpretation of the Prandtl model. However, other choices may be meaningful, for example, when the mass point represents a coarse-grained degree of freedom, in which case its motion can be anything from strongly underdamped to strongly overdamped.
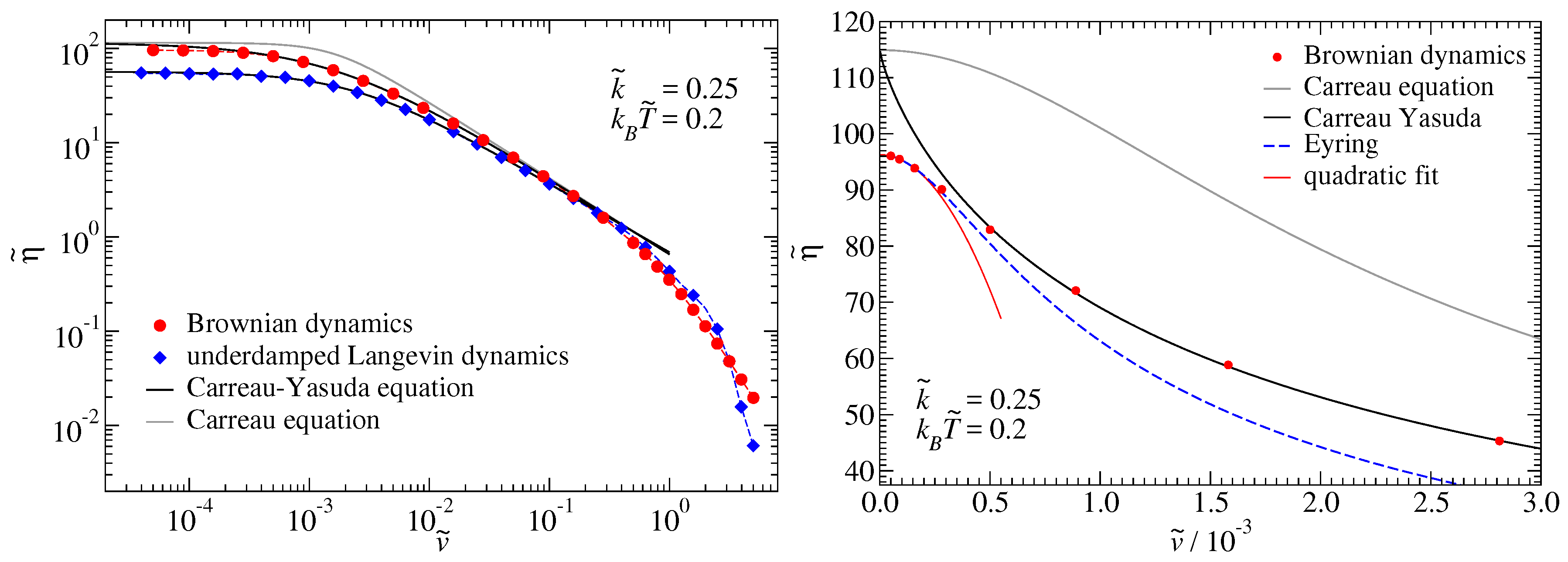
Figure 3 compares over- and underdamped dynamics for
at a thermal energy of
. Both curves show similar trends since they can both be fit very well over an extended velocity range with the CY equation. However, overdamped and underdamped
relations differ noticeably, in particular at very large and very small sliding velocities. Most importantly, the friction in the (slightly) underdamped case is reduced by a factor of approximately two in the
limit.
The adjustable parameters of the CY equation were fit to the data presented in
Figure 3 within the range
. Results for the fits are stated in the figure caption. The two dimensionless exponents
n and
a happen to be reasonably close to those reported by Yasuda for polystyrene [
21,
22]. Significant similarity between our results and Yasuda’s data on polystyrene is certainly also revealed by eye when comparing our
Figure 3 to Figure 4.1-3 in Ref. [
22]. We are certain that the agreement can be further significantly improved by slightly increasing
and reducing
, and, most importantly, by introducing a Stokesian damping between the mass point and the moving external potential. The last modification of our model would make the damping/viscosity level off at a finite value for large shear rates.
A large-velocity regime can be identified, in which the CY equation reflects the data extremely well when plotted in double logarithmic fashion. However, it does not accurately describe the changes of the effective damping at very small sliding velocities, as can be seen from the right graph in
Figure 3. For
, the effective damping obeys a quadratic
dependence, as expected from perturbation theory. Both the Eyring model and an even-power, second-order Taylor series expansion of the effective damping into
accurately reflect the low-velocity regime. The range in which Eyring is a reasonable approximation to the true data is certainly much larger than for a second-order Taylor series expansion. However, corrections to Eyring remain necessary to reach satisfactory agreement to values of
beyond
, e.g., in terms of a shear-rate or shear-stress dependent activation barrier.
Despite the close agreement between the simulation data and the CY equation at intermediate velocities, it must be noted that the agreement is not perfect. Systematic and non-monotonic deviations of order 5% occur, i.e., a quasi-exact proportionality between damping and velocity () at intermediate velocities, is not produced by the Prandtl model. We expect the same to hold for real, high-precision viscosity measurements as well.
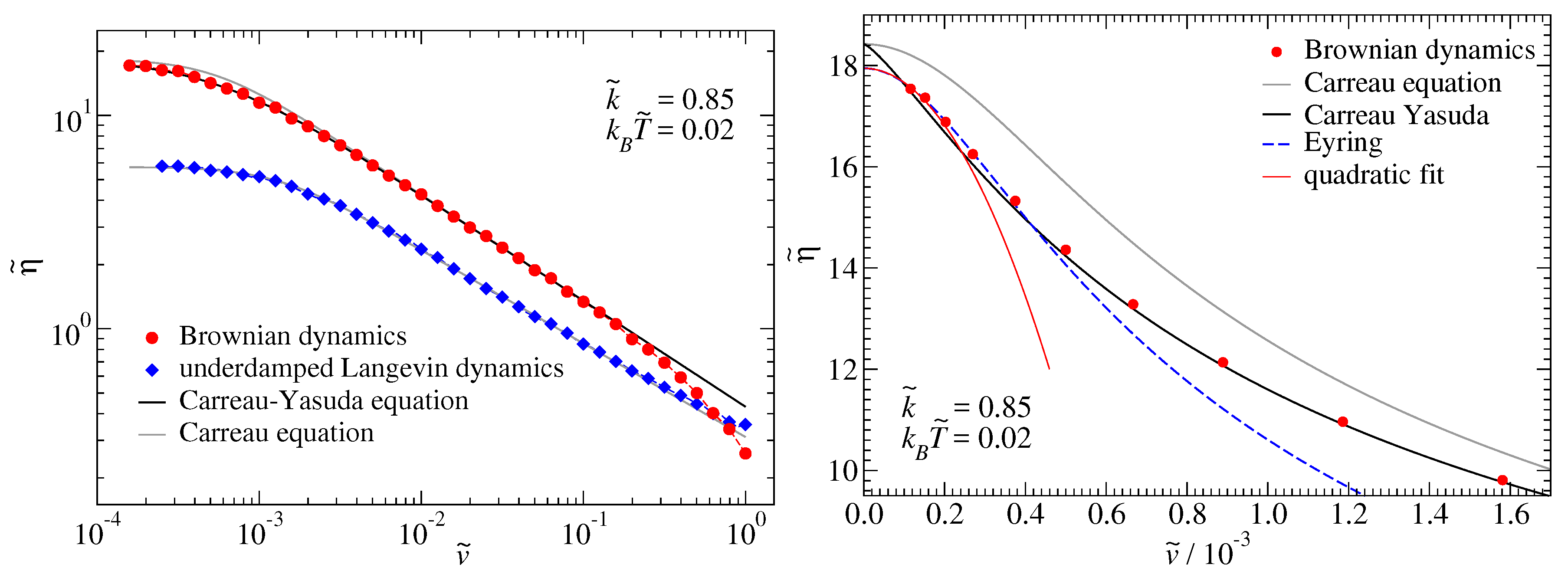
When
is increased, the friction–velocity relation continues to be described quite well by the CY relation, as can be seen in
Figure 4 for
. The exponent
n is noticeably reduced compared to that obtained for the more compliant
spring, specifically it acquires a value close to 0.5, which is representative of human blood [
28]. To what extent this agreement is coincidental is discussed in
Section 4.
While the rheological responses shown in
Figure 3 and
Figure 4 are quite similar, some differences appear to be worth noting. First, the discrepancy between over- and underdamped friction has become more significant at the larger value of
: it grew from a factor of two to a factor of three. Second, at the smaller reduced spring stiffness, both rheological response functions clearly required the exponent
a to be less than 2. For the larger reduced spring stiffness, the rheological response function of the underdamped system could be very well described with
, i.e., the value that
a takes in the Carreau model, while an accurate description of the overdamped system necessitated a value close to unity. Third, the low-
expansions (Taylor or Eyring) of the effective damping always remained smaller than the fit to the CY equation in case of the small value of
, but not for the larger value.
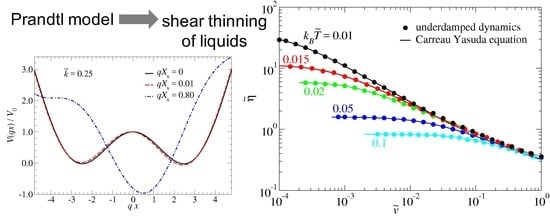
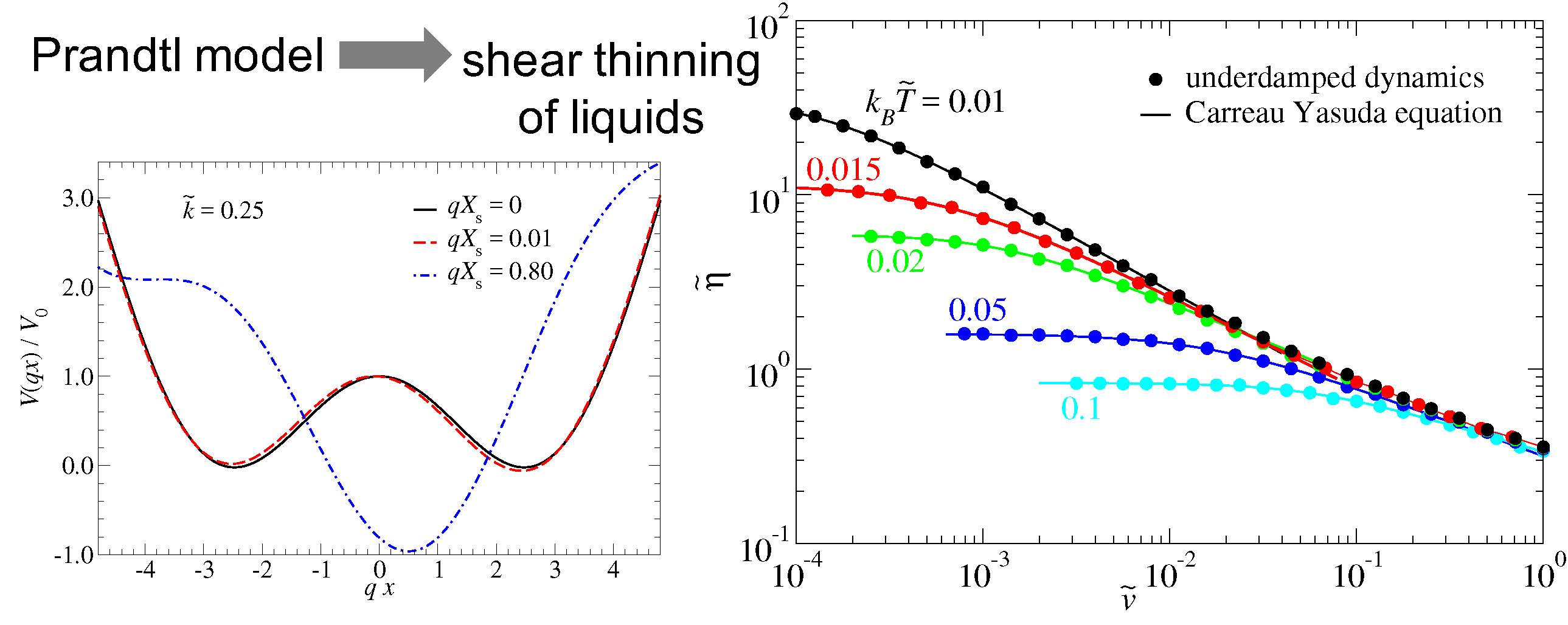
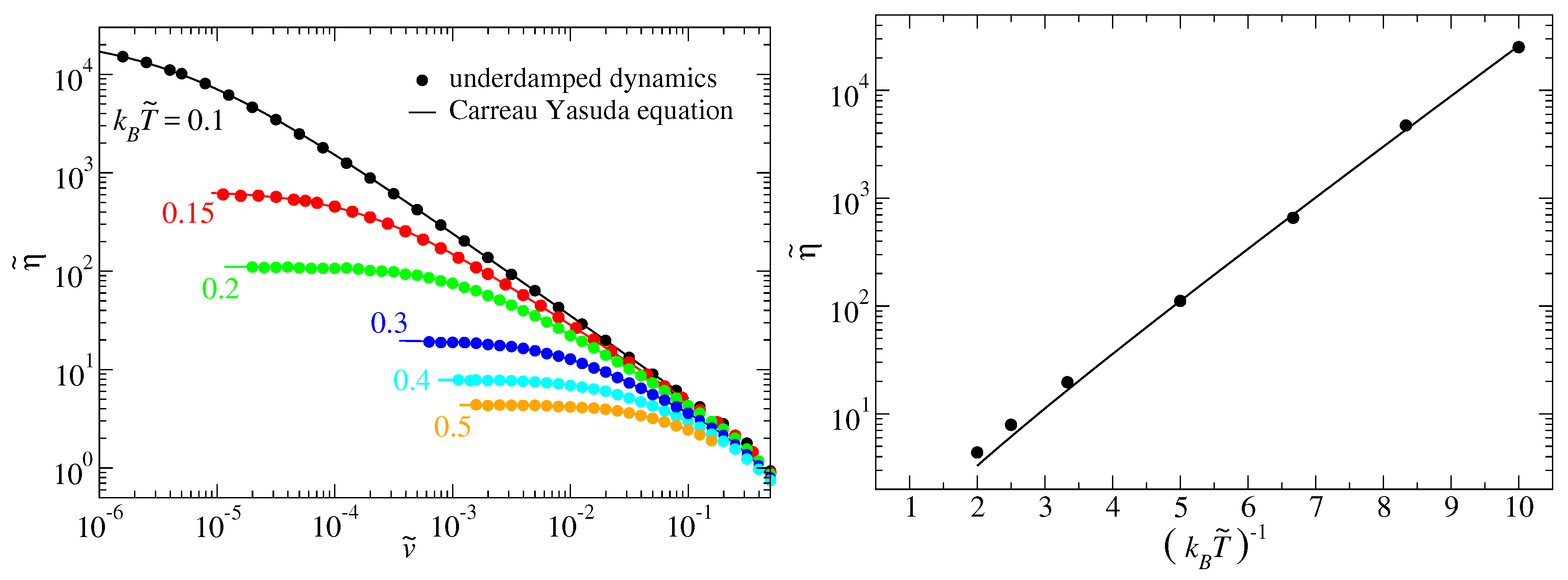
We next investigate how the
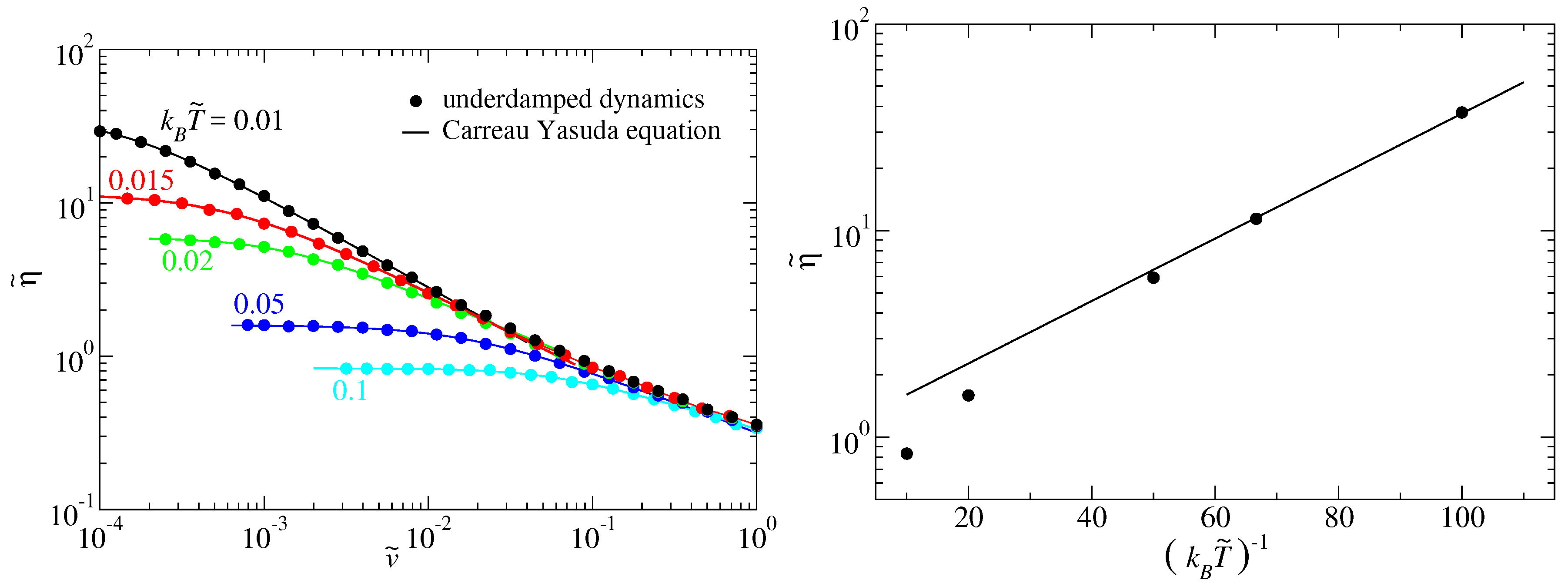
relation depends on temperature for the two reduced spring stiffnesses investigated so far. The left graph in
Figure 5 shows data for
and reveals the following, frequently observed behavior: The temperature dependence of damping is less pronounced at high than at low shear rates and the transition between non-Newtonian and Newtonian behavior moves to smaller velocities at decreasing temperature. Coefficients deduced from fits to the Carreau–Yasuda equation read for the two most extreme investigated temperatures are:
= 25,200,
,
, and
for
and
,
,
, and
for
. Thus, damping increases by roughly four orders of magnitude upon cooling as the thermal energy is decreased from
to
, while the cross-over velocity decreases by a similar factor. In addition, the exponent
n decreases upon cooling, while
a increases. In fact,
is so close to zero that the resulting power law
is difficult to distinguish from a logarithmic dependence in a double logarithmic representation unless
v spans more than two decades.
Similar to the exponent
n, the exponent
a decreases systematically with decreasing temperature, When the thermal energy is no longer very small compared to
, it appears that data can be described by assuming
, as revealed for
. However, while data appear to be perfectly consistent with the Carreau equation, as can be seen in
Figure 5, the fit further improves by setting
a to
.
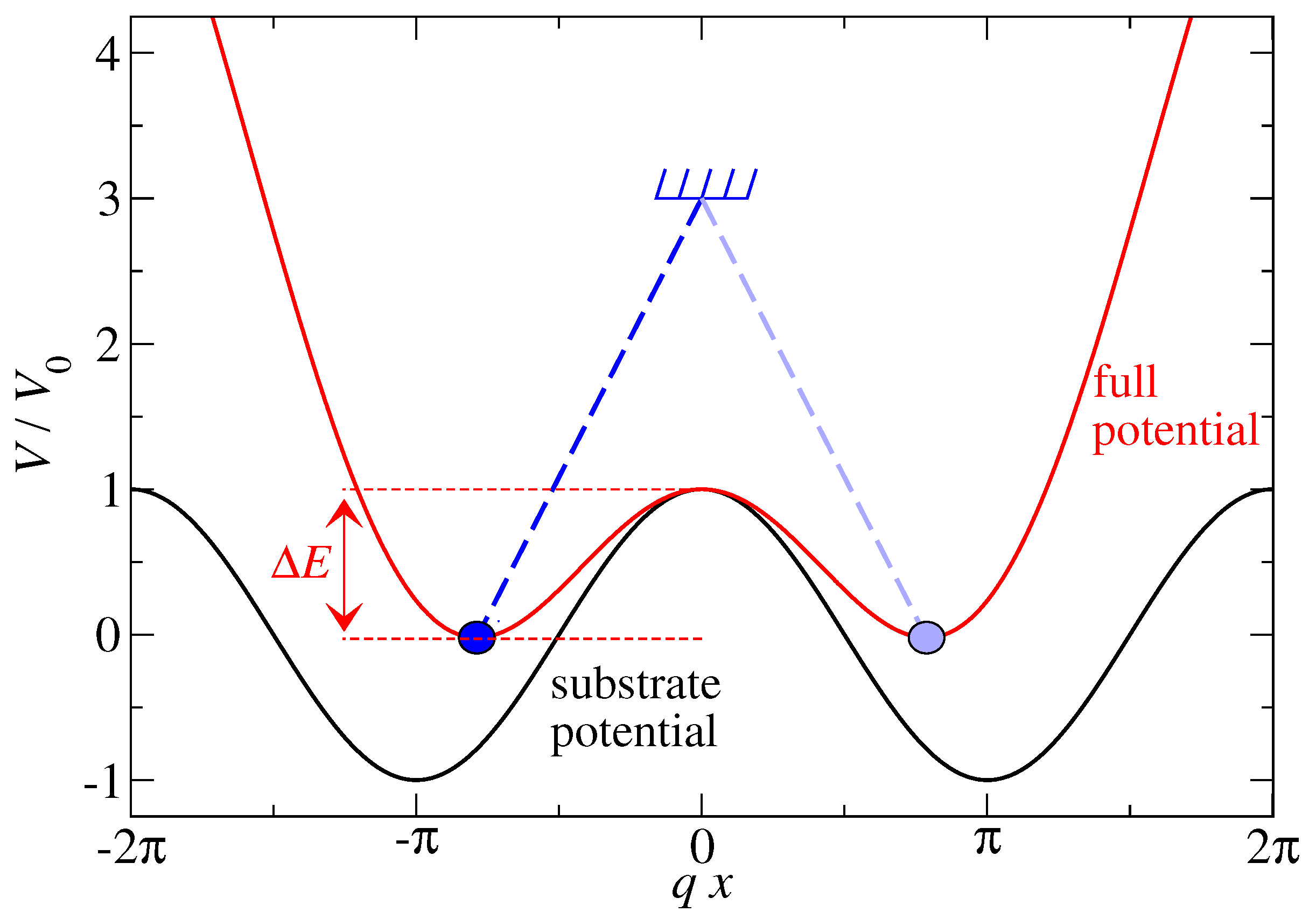
The temperature dependence of the effective damping is analyzed in the right graph of
Figure 5. At low temperatures, it satisfies Equation (
6), where
was determined, as indicated in
Figure 1. Thus, only
and
, were adjusted for Equation (
6) to fit the simulated data.
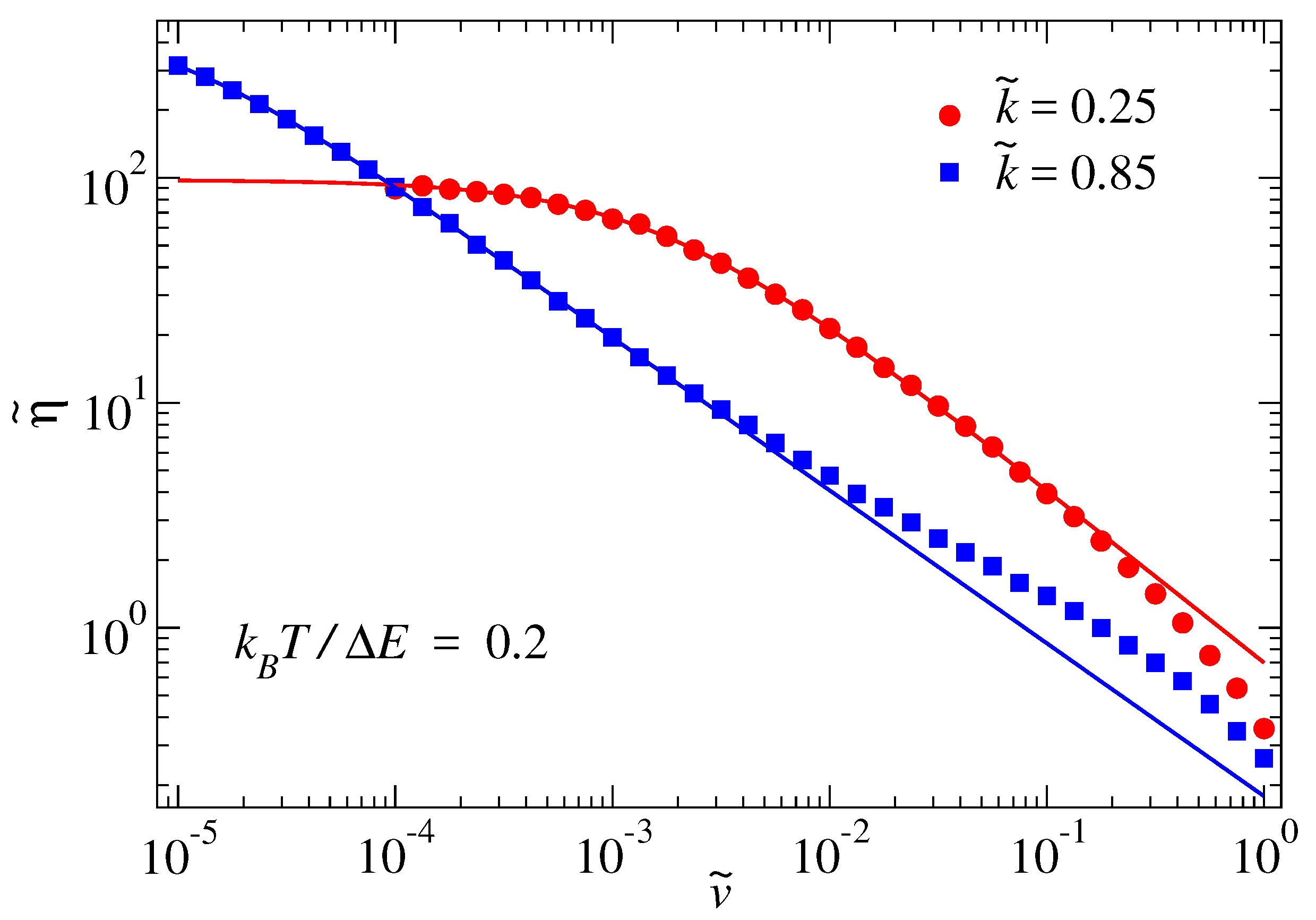
The just reported analysis was repeated for
and the pertinent results presented in
Figure 6. For the softer springs,
is reduced to approximately 0.035, which in turn is consistent with a reduction of the exponent
n. The exponential increase of damping at small thermal energies with inverse temperature can again be described assuming the barrier depicted in
Figure 1 to be the relevant one. However, the prefactor to
at small
is now consistent with an essentially constant value near unity. To ascertain if the indicated low-temperature behavior is truly asymptotic for either
or
, a lower temperature would have to be reached. We plan on addressing this in the future either using improved integration schemes for the FPE or a pertubative treatment.
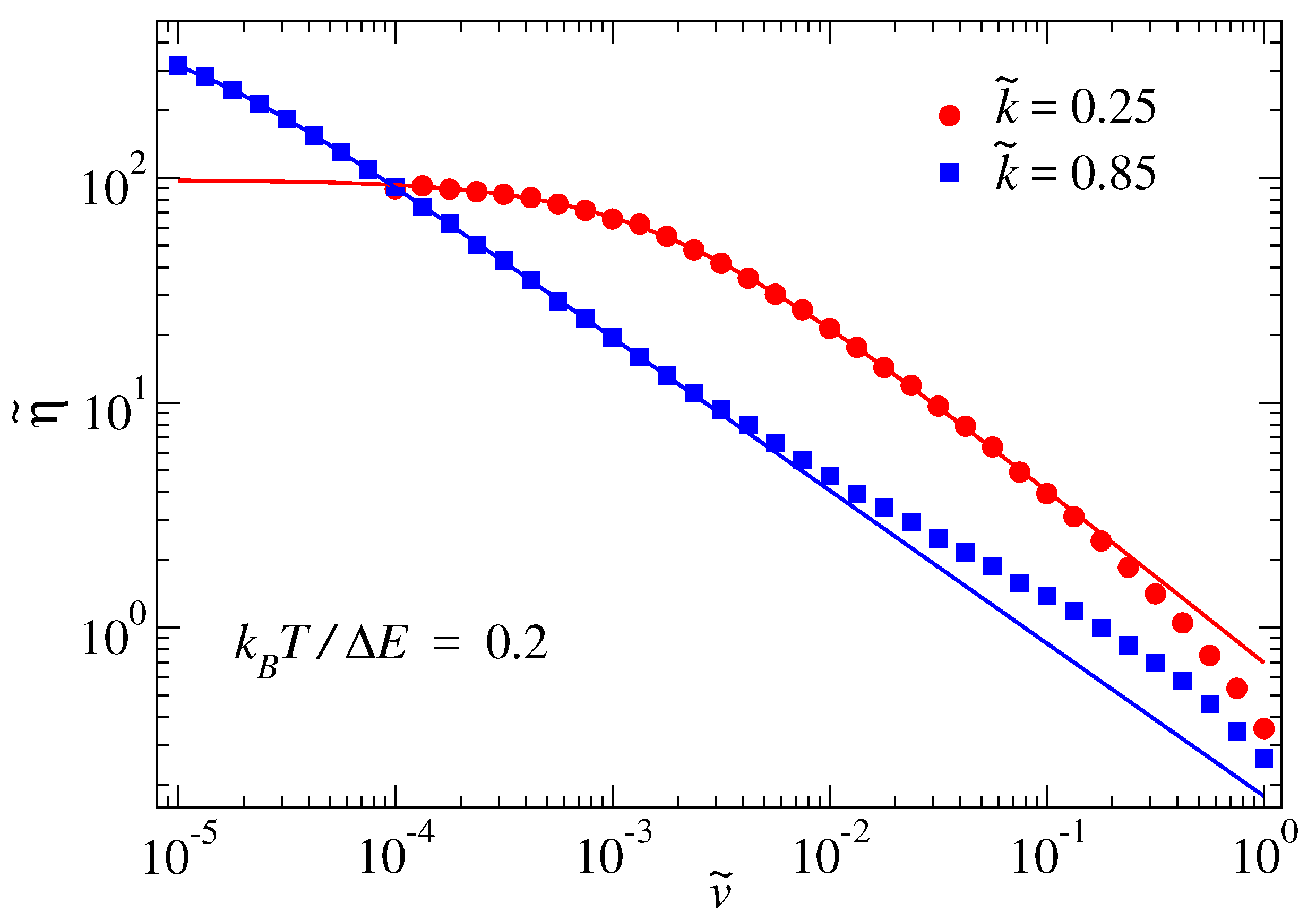
The next simulation data presented explicitly is meant to test the order-of-magnitude estimates of the equilibrium damping made in
Section 2.1.2. Towards this end, the velocity dependence of the damping term is computed for the two spring stiffnesses
and
at a fixed value of
. Results are presented in
Figure 7. The dominant factor
in Equation (
6) yields
, which is 1.5 larger than the value for
reported in the caption of
Figure 7 and a little less than a third predicted for
. The cross-over velocities were crudely estimated to differ by a factor of 80 in the discussion of
Figure 2. This is to be compared to a ratio of 190 found in the full simulations. Thus, additional work is required to develop better estimates.
An interesting trend revealed in
Figure 7 relates to the breakdown of the Carreau–Yasuda equation at large velocities. It can either overestimate or underestimate the true damping when parameters were fitted to the cross-over region and predictions then made for large shear rates. Since the high-temperature viscosity
is usually a fit parameter (while it was set and thus known to disappear in the current study), the regime for which CY is believed to be valid for given experimental data can be easily overestimated. In any event, the appearance of a shoulder at large velocities and values of
approaching unity from below is observed for both underdamped as well as overdamped dynamics.
In the data shown explicitly in this work thus far, the values for the two dimensionless exponents in the CY equation range from 0.156 to 0.769 for n and from 0.685 to 1.66 for a. Many additional simulations were run outside this range, which corroborated the expectation that n can take any value in between zero (for ) and unity (for ). This expectation arises from the observation that the Prandtl model reduces to Eyring in the limit so that follows automatically, while, for , the friction for the Prandtl model is Stokesian at small velocities, even without thermal fluctuations.
The final systematic analysis is concerned with the analysis of how the effective free-energy barrier, defined in Equation (
3), depends on the shear stress. Results for
(overdamped dynamics) and
(underdamped dynamics) are shown in
Figure 8.
The data for
reveals an astonishingly good agreement between simulation and the theory developed in
Section 2.1.3 for the force-induced reduction of the effective free-energy barrier. These corrections are a function of the shape of the corrugation potential. They would therefore be different if the corrugation potential had a different functional dependence by including higher-order harmonics. The original Eyring theory, which does not include shear-force induced corrections to the free-energy barrier, provides an upper bound for the reduction
, which is approached from below as
T is decreased. The data for
consolidates the claim that the Eyring model is obtained as a limiting case of the Prandtl model, even if
is still not fully
.
The effect of shear stress on the reduction of the effective energy-barrier is qualitatively similar for as for the just-discussed . The reduction is again roughly linear in the (shear) force and only crosses over to a parabolic-like dependence at very small values of . The change of the energy-barrier reduction (as measured in units of ) with is similar in magnitude for both ; however, it is slightly reduced for the larger . The reduction of this slope is much more significant for , which is not shown explicitly. In all cases, the slope in the linear regime can be very roughly approximated to be , where is the distance between the location of the minimum and that of the barrier in the force-free case.
Outside the range of instabilities (), the Prandtl model predicts shear thickening at small . The corresponding data, which is not shown explicitly, is again consistent with the CY equation over two or three decades in shear rate. In the Prandtl model, this shear thickening could be the consequence of resonance effects that arise because the substrate potential reaches the spring’s eigenfrequency, or, in the case of overdamping, the inverse relaxation time. Thus, in an atomistic interpretation of the Prandtl model, velocities near the speed of sound would be required to approach those frequencies. Consequently, strong non-linearities, such as heating, cavitation, chemical break-down of the lubricant, etc. would arise, which are all not captured by the model. This is why it would be meaningless to study resonance in this case. However, if the mass point of the Prandtl model represented a coarse-grained degree of freedom, resonance effects are possible at velocities much below the speed of sound.
4. Discussion and Conclusions
In this work, the rheology associated with the Prandtl model was studied and found to be very similar to the rheology of real liquids. In particular, by converting the velocity dependence of damping to a shear-rate dependence of the effective viscosity, the rheological response of the Prandtl model reproduced the Carreau–Yasuda equation over a large range. A similarly satisfactory description could not be achieved with other phenomenological descriptions over the same range using only the same number of adjustable parameters. The crude interpretation of shear thinning in the Prandtl model is similar to the one described by Lacks [
29] for a more realistic, all-atom model, consisting of binary, glass-forming Lennard–Jonesium:
The viscosity can be [is] separated into a “structural” contribution associated with the energy minima that the system visits, and a “vibrational” contribution associated with displacements within the energy minima. The structural contribution is shear thinning due to strain-activated relaxations caused by the disappearance of high-stress energy minima, while the vibrational contribution is Newtonian. This sudden disappearance of high-stress energy minima does not occur in the Eyring (
) limit of the Prandtl model, but only for finite values below the critical stiffness, i.e., it necessitates the elastic component of a fluid’s viscoelastic properties.
Due to its simplicity, the Prandtl model allows some fundamental questions to be investigated with a high (numerical) precision, which might not be achievable experimentally, or when conducting simulations of more explicit and realistic models, although such simulations have now reached an impressive accuracy [
17,
19,
30]. This concerns in particular the analysis of the initial stages of shear thinning at extremely small shear rates. We found that leading-order corrections to the effective Newtonian viscosity are quadratic in velocity (and thus quadratic in friction or shear stress), but that this initial regime can be extremely narrow. At the same time, the effect of this initial transition to the cross-over regime (i.e., when sliding velocities are of a similar order of magnitude as the parameter
in the CY equation) can still be significant, even if the CY equation appears to be a perfect fit. In the Prandtl model, equilibrium damping can be easily overestimated by as much as 20%, by extrapolating the damping from
to
using the CY equation. As such, we suggest that Newtonian viscosities should generally lie between the apparent viscosity measured at the smallest shear rate and the value obtained from fits to phenomenological equations such as Carreau–Yasuda, at least as long as the experimental data extend only to the cross-over shear rate.
Interestingly, the Prandtl model yields a broad range of values of the exponent
n in the CY equation, depending on the temperature and velocity; any value
appears to be possible. Lowering the reduced temperature and/or decreasing the dimensionless spring constant lowers
n. For
, shear thickening can be obtained. A single dissipative spring suffices to accomplish this, even if the model can be readily generalized to yield more complex rheology by augmenting or replacing the spring with other rheological elements composed of springs and dashpots, such as those defining Maxwell and Kelvin–Voigt materials. Particularly meaningful would be to introduce an additional damping element in series with the current dissipative spring, in which the time constant of the new damping element reflects the life time of the local topology or “cage” into which an individual atom is embedded. The topology can be defined by quenching a fluid via a steepest descent to the nearest minimum [
31]. Once properly parameterized, such (thermostatted) Prandtl models show great potential for modeling complex rheological responses of liquids for which the use of many conventional rheological elements is currently needed when their relaxation functions cover several decades in time.
The numerical studies presented in this work were focused on two particular values of
. For
and intermediate values of
, the exponent
n took values in the vicinity of 0.2, which is characteristic for many polymers under ambient conditions. For
, values near
were obtained, which is close to that observed for human blood [
28]. This in itself is not yet necessarily meaningful, but an interesting question is if the model allows the way in which the exponent
n changes for different system to be rationalized.
For example, let us assume the Prandtl model is parameterized to reproduce the rheological response of a polymer under ambient conditions. As the temperature is lowered, the effective damping will increase at a given velocity, while the crossover velocity decreases substantially. This happens in such a way that the exponent
n decreases in the Prandtl model upon cooling, as in a real liquid. When keeping the parameters in the Prandtl model fixed, this decrease is approximately exponential in inverse temperature, which would reflect the behavior of many liquids including glass-forming liquids cooled below their fragile-to-strong-transition temperature [
32]. If the pressure were increased, the steric repulsion between non-bonded monomers would be enhanced so that an increased value of
would have to be used in the Prandtl model to account for that increase. At the same time, the elasticity of individual polymers would scarcely change. Consequently, the dimensionless parameter
n would be reduced along with
. This argument agrees with the known phenomenology of polymers.
Assume next that the Prandtl model is parameterized to reproduce the rheological response of human blood cells, for which
appears to describe the shear thinning reasonably well [
28]. Now, a camel comes along, which happens to belong to a species with extraordinarily stiff red blood cells [
33]. It appears obvious that stiff springs have to be used in the Prandtl model to account for the stiff red blood cells of camels. Increasing the (dimensionless) stiffness in the Prandtl model significantly reduces shear thinning, in agreement with the rheology of camel blood [
33]. There might be even more details of the rheological response of blood that the Prandtl model is able to reproduce. For example, at large velocities, the effective damping for
does not quickly converge to the high-velocity limit, but shows an indication of a shoulder. A similar shoulder is also observed in detailed simulations of human blood cells as can be seen in Figure 1 of Ref. [
34]. It is not clear at this point to what extent this similarity can be further increased with minor adjustments to the model or to what extent the shoulder in our simulations simply indicates a resonance of the spring at a given beat frequency. However, it is possible that the qualitative resemblance is not entirely coincidental. To demonstrate that this is indeed the case, a true bottom-up parameterization would be required, which is certainly beyond the scope of this work.
We conclude by quoting again Prandtl:
“we obtain the complete transition from solid bodies to liquids of low viscosity including all states of softening in between”. While in today’s jargon one might talk about
shear thinning rather than
softening, our work reveals that Prandtl’s expectations were not too high. To reproduce the frequently observed characteristic power-law dependence of shear stress or effective viscosity on load, there is no need to postulate a (broad) distribution of energy barriers as done by Ree and Eyring [
35]. Prandtl’s model can be parameterized to represent not only the temperature and velocity dependence measured in atomic-force microscopy experiments but also the shear thinning of fluids as diverse and complex as polystyrene and blood.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}