3. Definition of the Impact of the Profile Failure on the Transmission
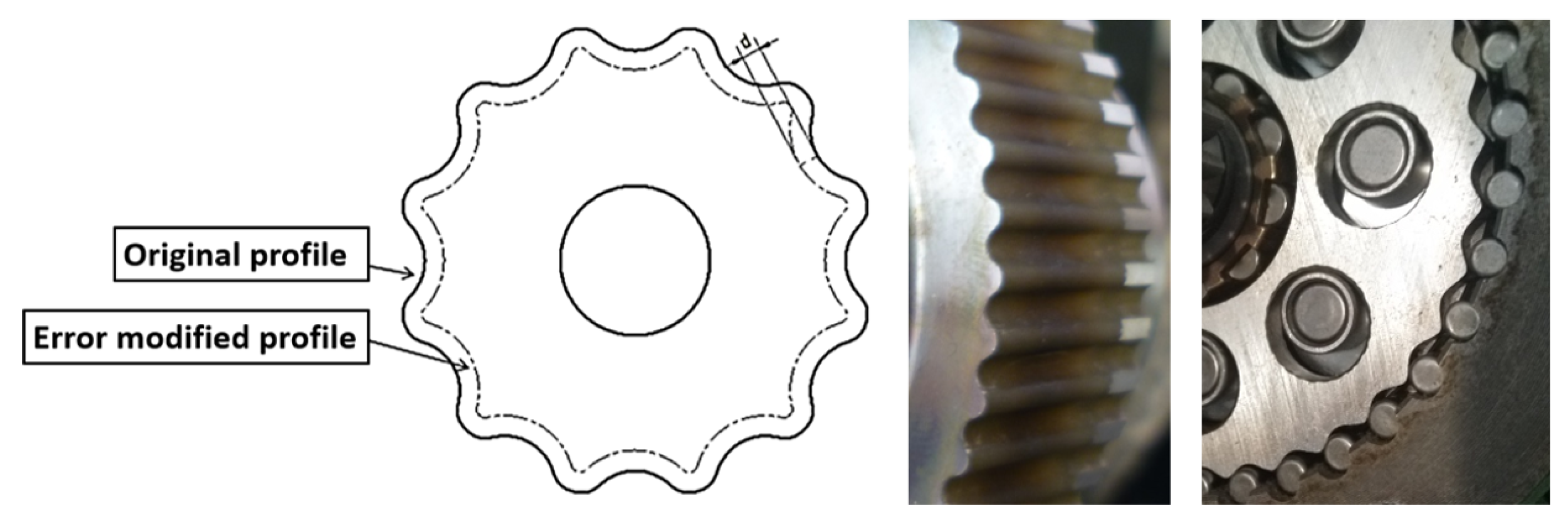
During the research, the maximum deviation of the transmission from the theoretical figure was determined with different profile failures for several modules and cog numbers. First, the geometrical connections required to define the transmission figure were derived, later we examined how profile failures affect transmissions. Equations describing the connection of gears were solved using numerical methods in a Scilab environment.
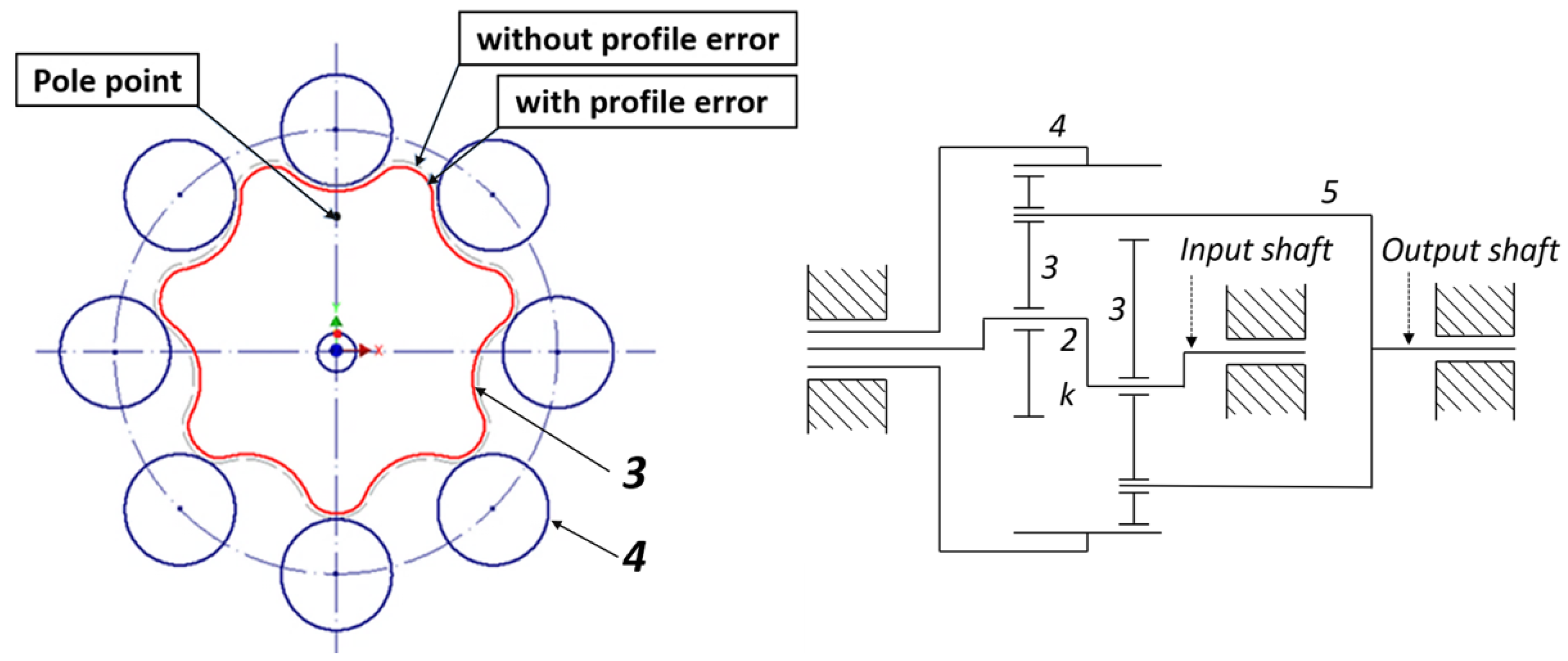
Cycloidal drives are high power-density gearboxes consisting of one, but preferably two (3) planetary gears, one (4) ring gear, and one (2) eccentric shaft driving the planetary gears. The numbers between the parentheses represents the components in
Figure 2. During the calculations, the initial state were determined by the theoretical curve without any failures. An interpretation of the initial state and a schematic concept of the cycloidal drive are illustrated in
Figure 2.
The first step is to define the rotation of the
input shaft, which is necessary for the hit
. The required rotation for the collision can be seen in
Figure 3.
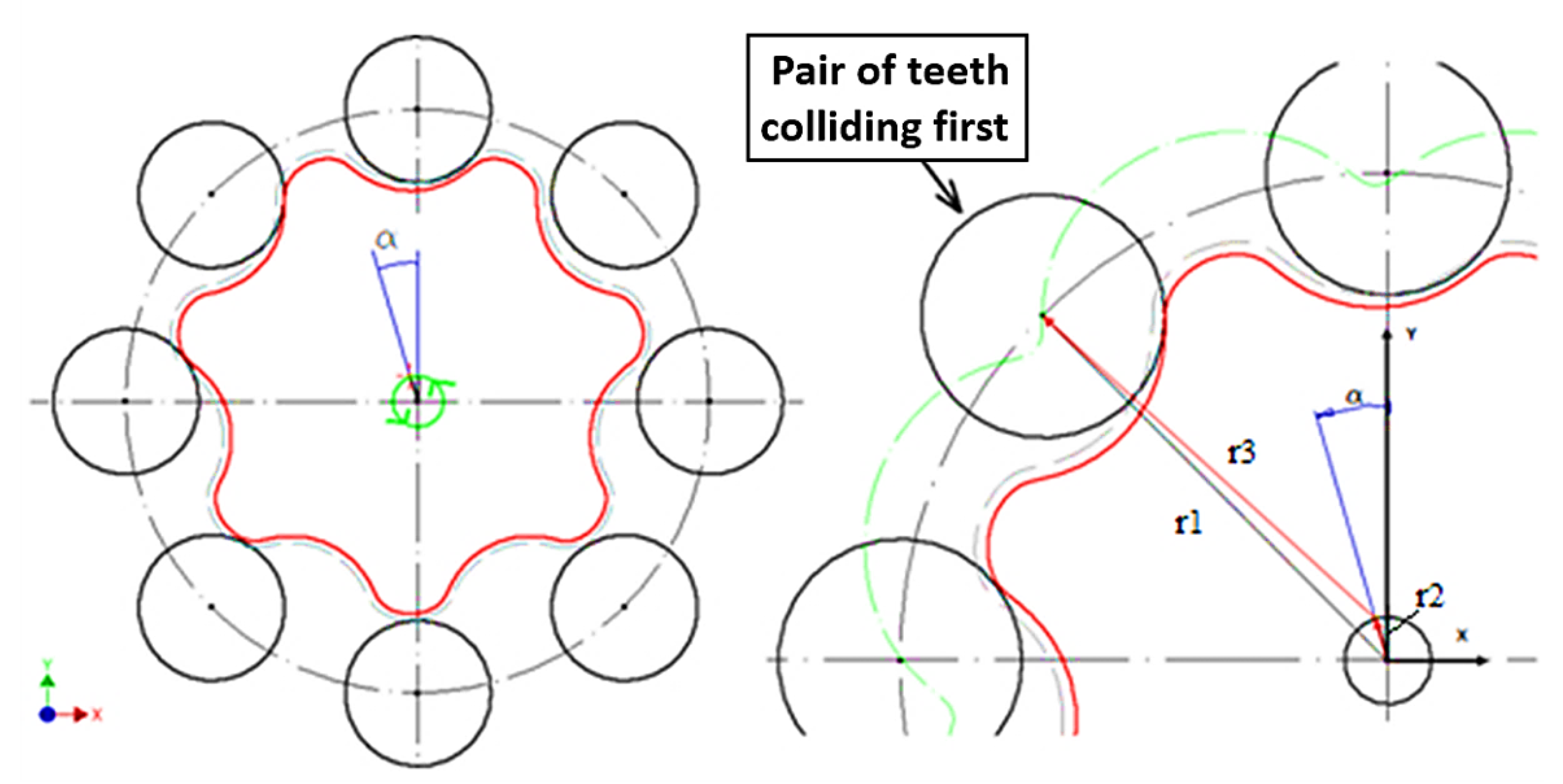
When the shaft rotates, the planetary gear makes an orbital motion, i.e., it does not rotate, but its center point moves along the circle determined by the
eccentric cam (
Figure 3). The rotation angle of the
input shaft required for the hit always has to be determined for the first pin located left from the pole point (where the absolute velocity equals zero) applicable to the theoretical curve (without any failures).
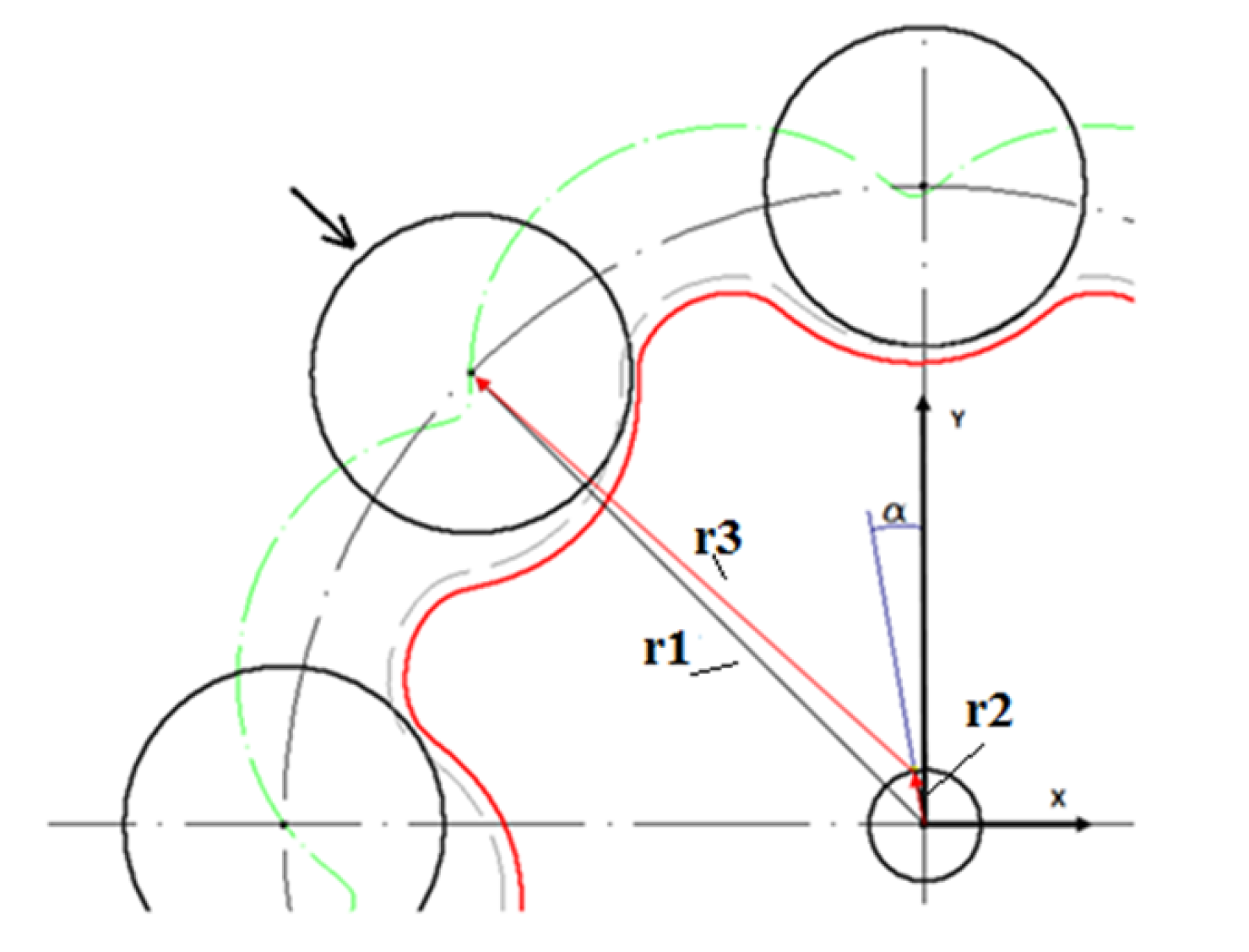
The contact of two curves, i.e., the profile curve and the circle (pin curve) has to be examined. In the case of a hit, the center point of the pin will be at a radius distance from the profile curve and thus the profile curve can be shifted by the pin radius toward the normal direction of the profile. Therefore, only the contact between one curve and one point has to be examined. When the pin in question hits, the following connection can be established according to the figure:
where
is the vector pointing at the center point of the pin in question,
is the vector pointing at the center point of the planetary gear,
is the rotation angle that is necessary for the eccentric cam collision,
is the vector describing the profile of the planetary gear shifted by the pin radius
into the normal direction, and
is the parameter of the equation depicting the curve.
Therefore, we can find the figures of
and
to which the above-mentioned equation applies, i.e., where the profile shifted by the radius
crosses the center point of the pin, the next step is to determine the gap between the cog pairs. To determine the gap between the cog pairs, see the following figure (
Figure 4):
In the case of a particular cogpair, the following equation can be established to define the gap:
where
is the vector pointing at the center point of the pin in question,
is the vector pointing at the center point of the planetary gear,
is the angle determining the location of the
eccentric cam,
is the vector describing the shifted cycloidal curve, and
R is the value by which the interrupted curve is shifted into the normal direction of the profile.
The calculation is performed in the above-mentioned way with the difference that now
R is one of the variables (unknown parameters); therefore, the gap is:
where
-is the pin radius.
The next step is to determine the transmission. To do that, it is necessary to determine the rotation angle of the
output shaft
depending on the rotation angle of the
input shaft
. The definition of the rotation angle can be seen in
Figure 5.
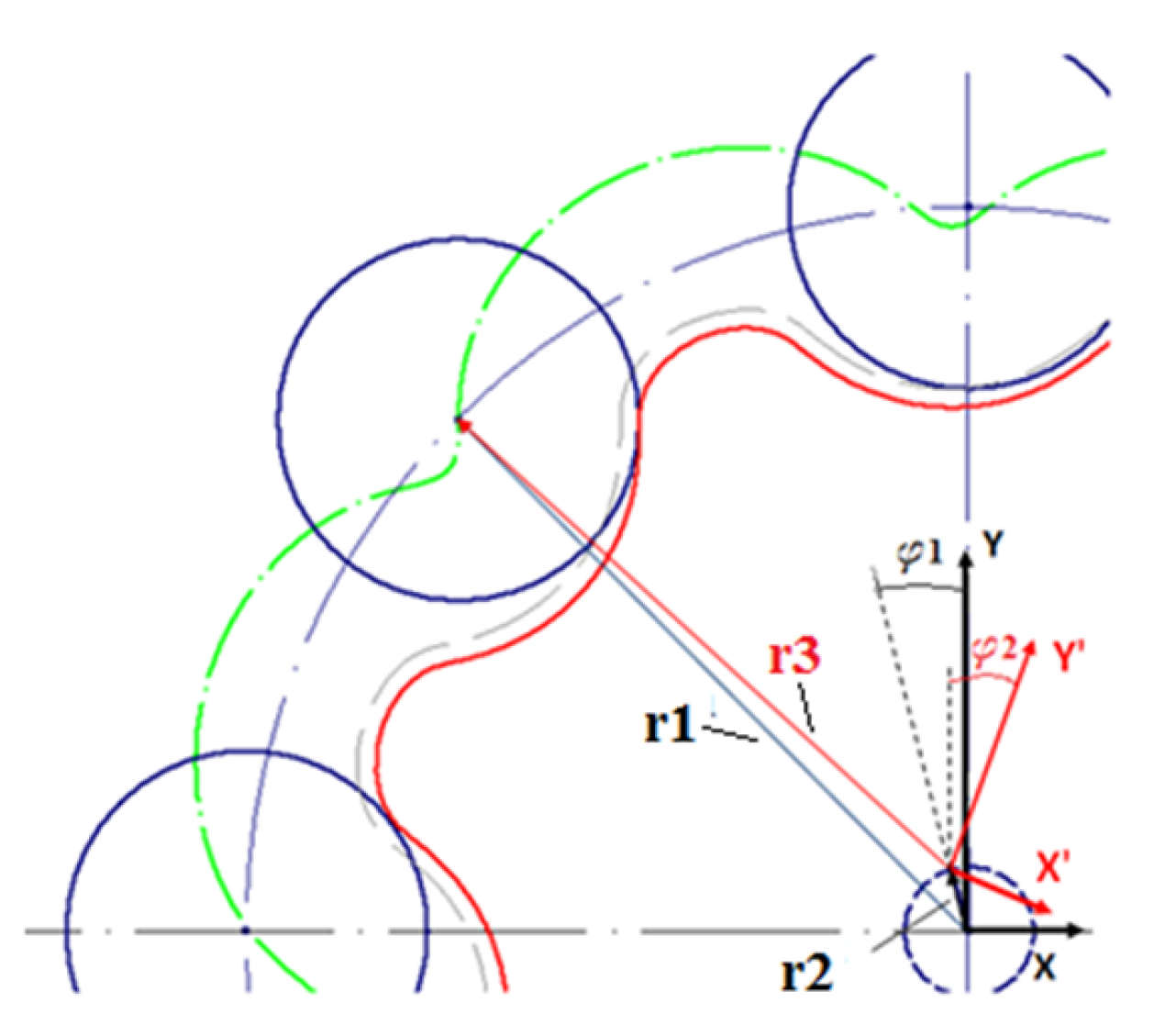
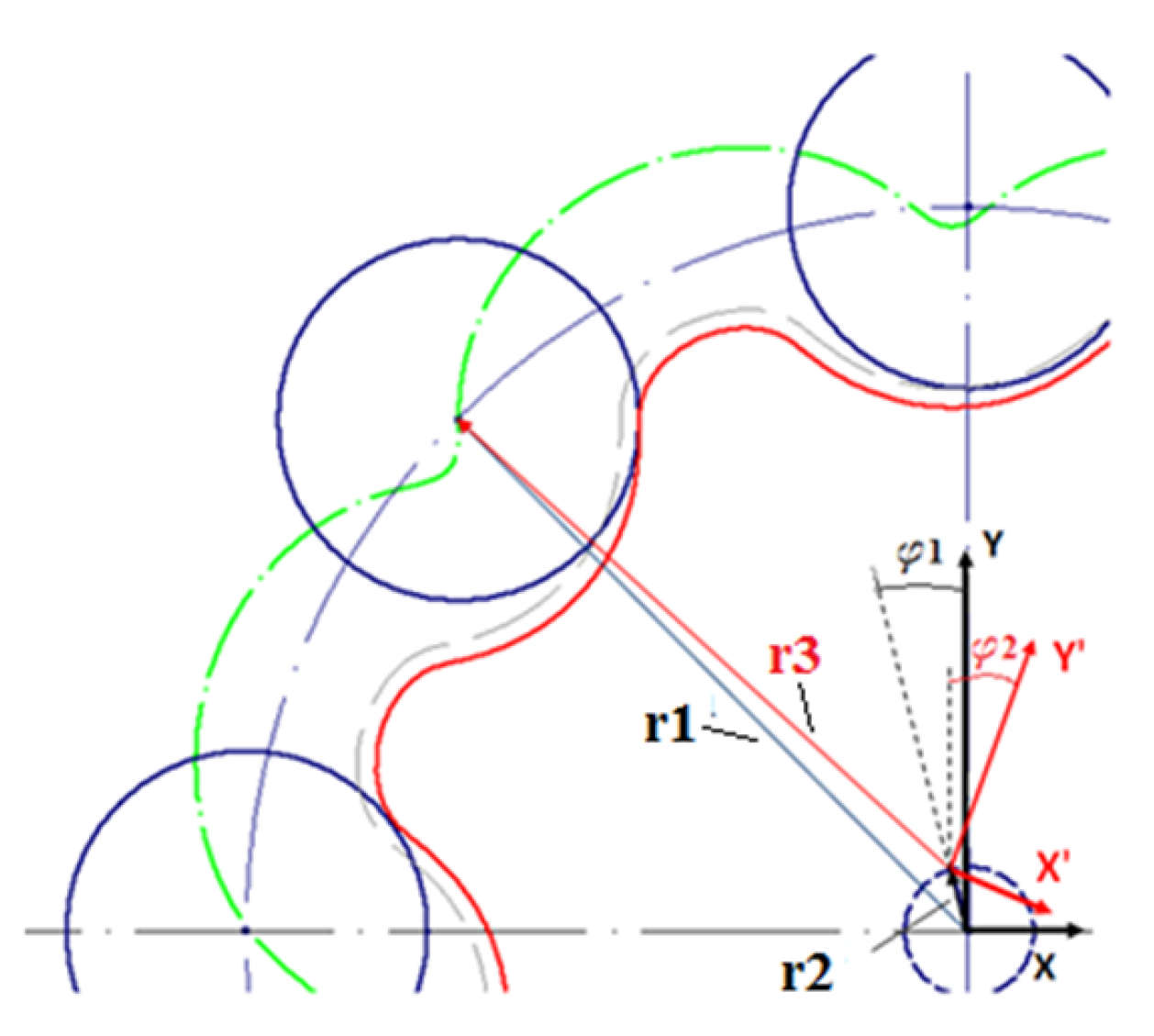
During the motion of the planetary gear, the curve shifted by the radius from its profile always crosses the center point of the connected pin.
The equation describing the shifted curve is given in the coordinate system , which is attached to the planetary gear. The vector indicated in this system will be converted into the coordinate system created for the (4) ring gear. After that, we make it equal with the vector pointing at the center point of the pin .
When two pins are connected, the following equation shall be applicable using the signs of the figure:
where
is the vector pointing at the centerpoint of the connected pin,
T is the transformation matrix,
is the vector containing the parameter equations describing the shifted curve in the coordinate system
where
is the parameter of the equations describing the curve,
is the vector pointing at the centerpoint of the planetary gear,
is the rotation angle of the
input shaft, and
is the rotation angle of the planetary gear.
The two variables
and
can be determined for the figure
as indicated in the above-mentioned equation. Knowing the figures
and
, the transmission can be calculated as follows (
Figure 6):
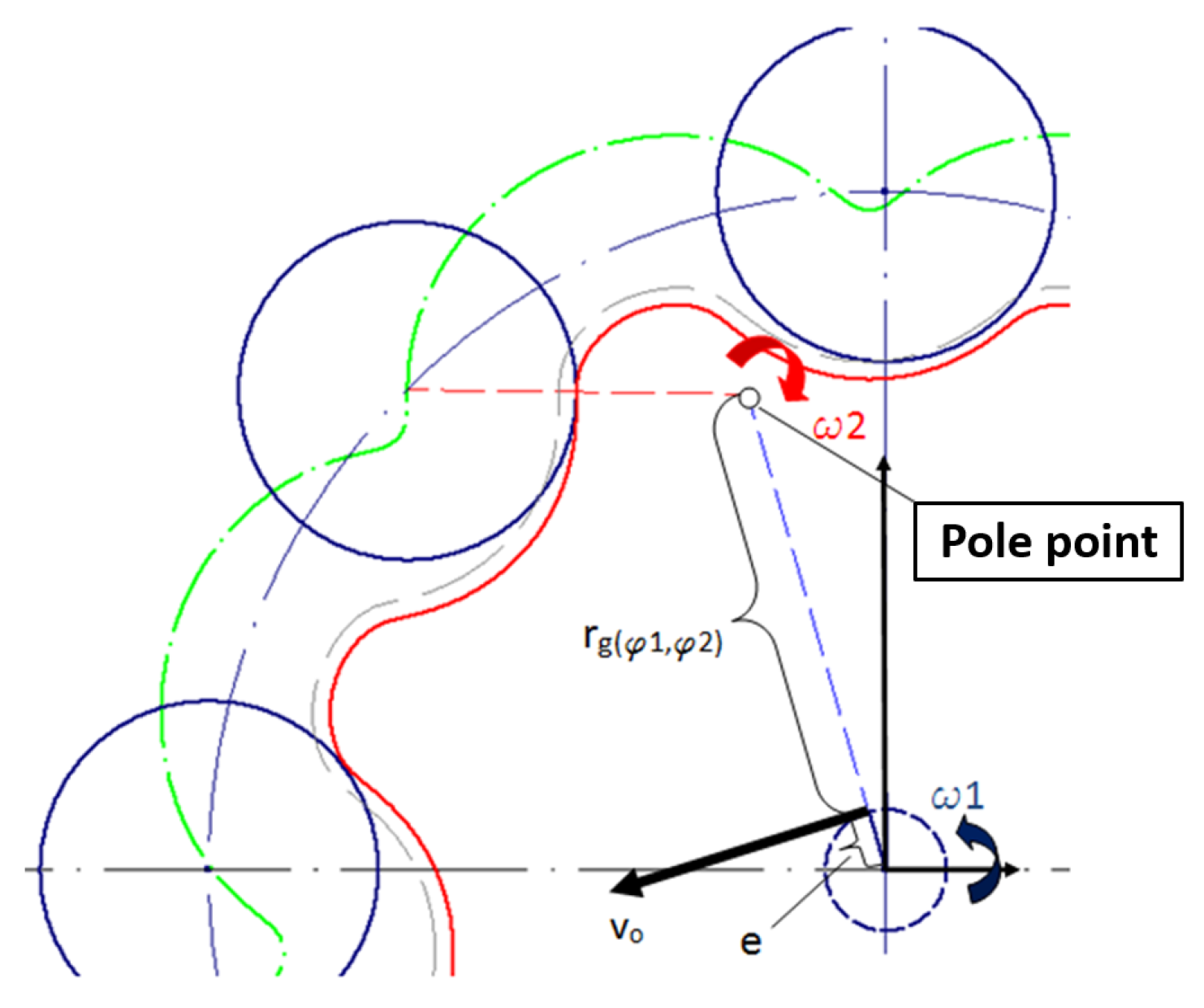
If the rotation of the planetary gear
aligned to the particular rotation value of the
eccentric cam
is known, the location of the pole point can be determined based on these values (
Figure 6).
The speed of the center point of the planetary gear can be described in two ways:
Equations
and
are made equal and arranged:
where
e is the eccentricity (axial distance) and
is the distance of the center point of the planetary gear from the pole point.
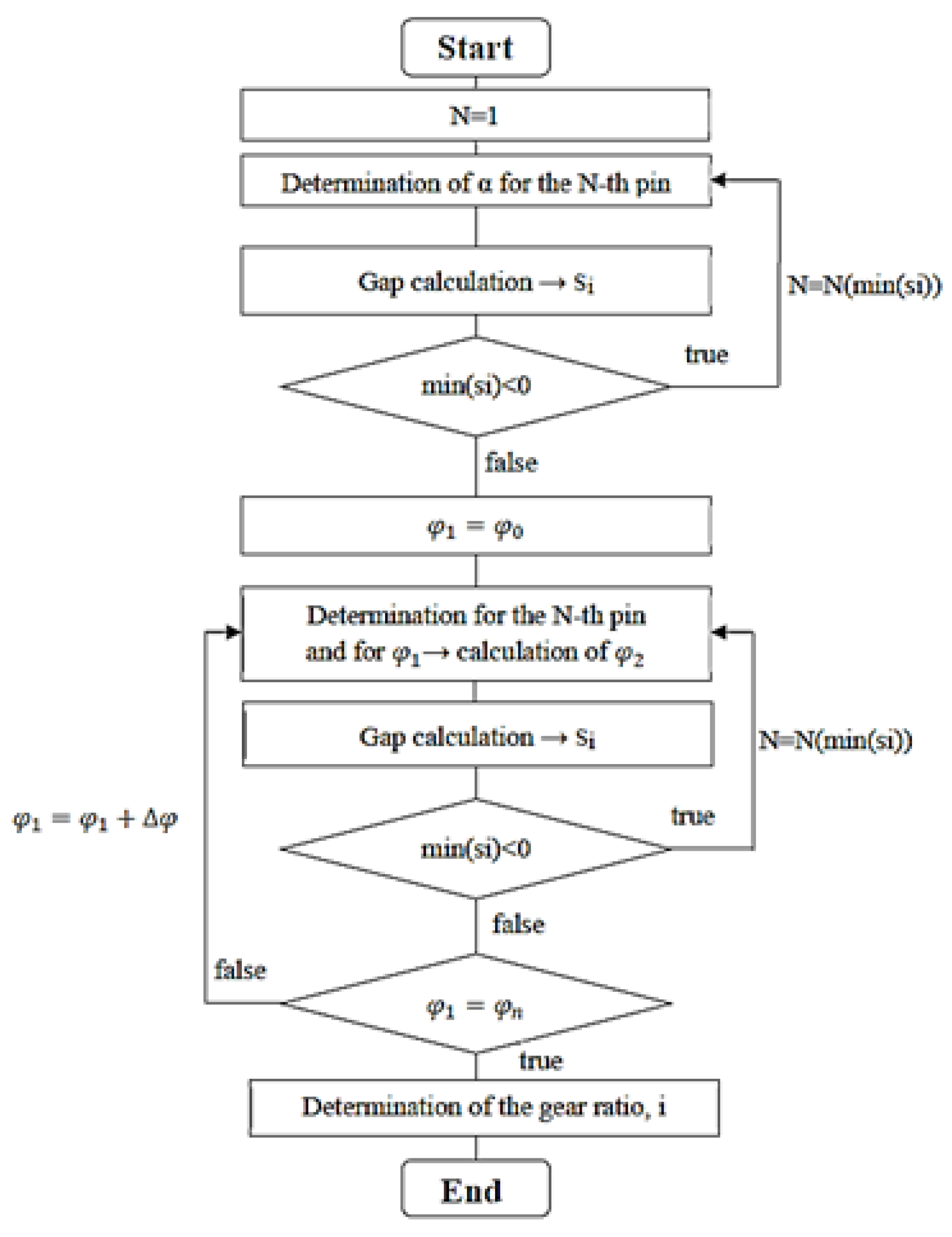
The above-mentioned equations are solved numerically. The process diagram of the algorithm is shown in the following figure (
Figure 7).
Here, is the rotation angle of the eccentric cam required for the collosion, N is the number of the connected pins, is the gap calculated at the pin i, is the number of pins defined for the minimum gap, is the rotation angle of the eccentric cam , is the rotation angle of the planetary gear, and is the grade of the rotation angle of the eccentric cam.
We use the data of the examined gear pairs of a particular drive as an example. You can see the parameters of the examined gear pairs in the following
Table 2:
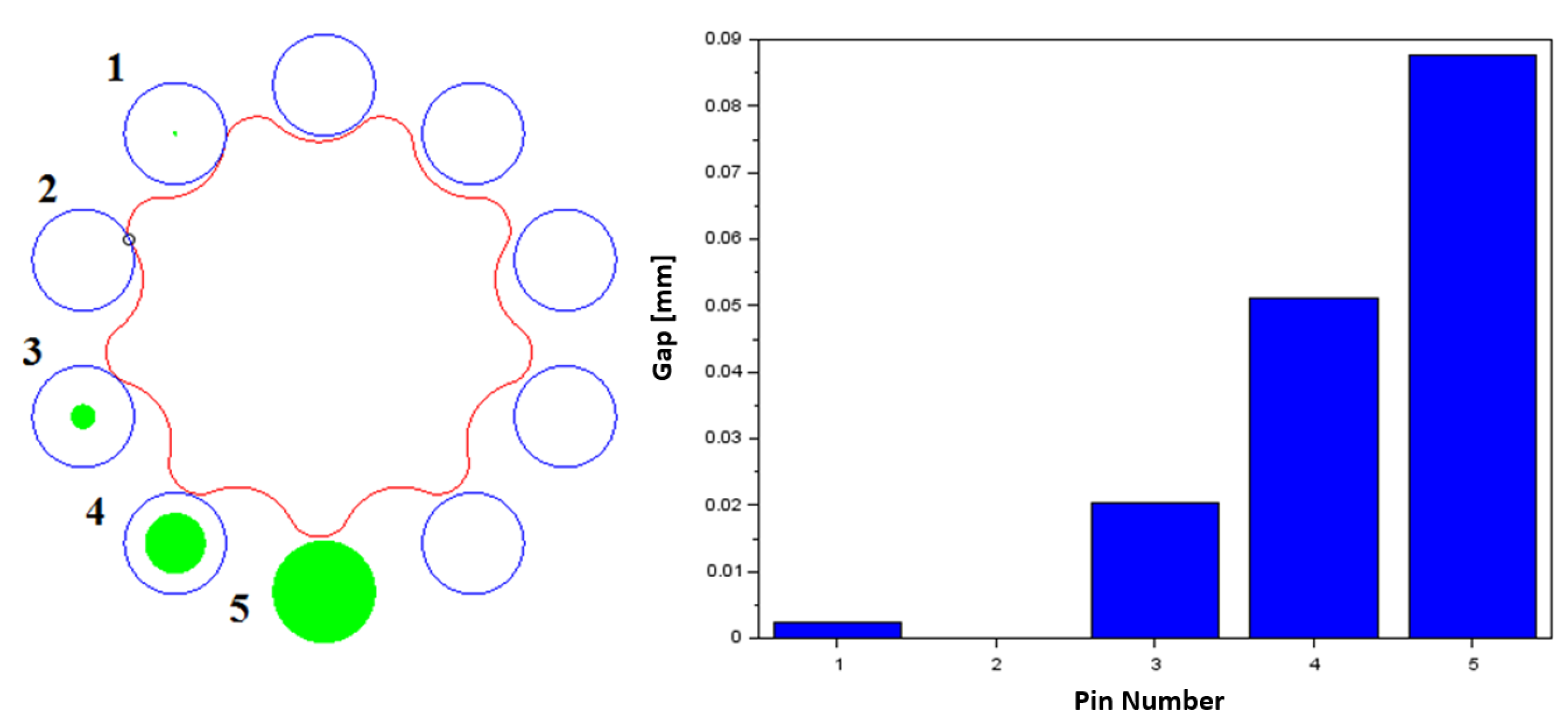
As it is shown by the algorithm, the rotation angle of the
input shaft needed for the hit was determined first. It can be seen that pin number 2 hits first (
Figure 8). On the left-hand side of the following image, the gap belonging to certain pins are marked with a circle. The gap size is proportional to the circle diameter. On the right-hand side of the picture, the column diagram also shows the gap size.
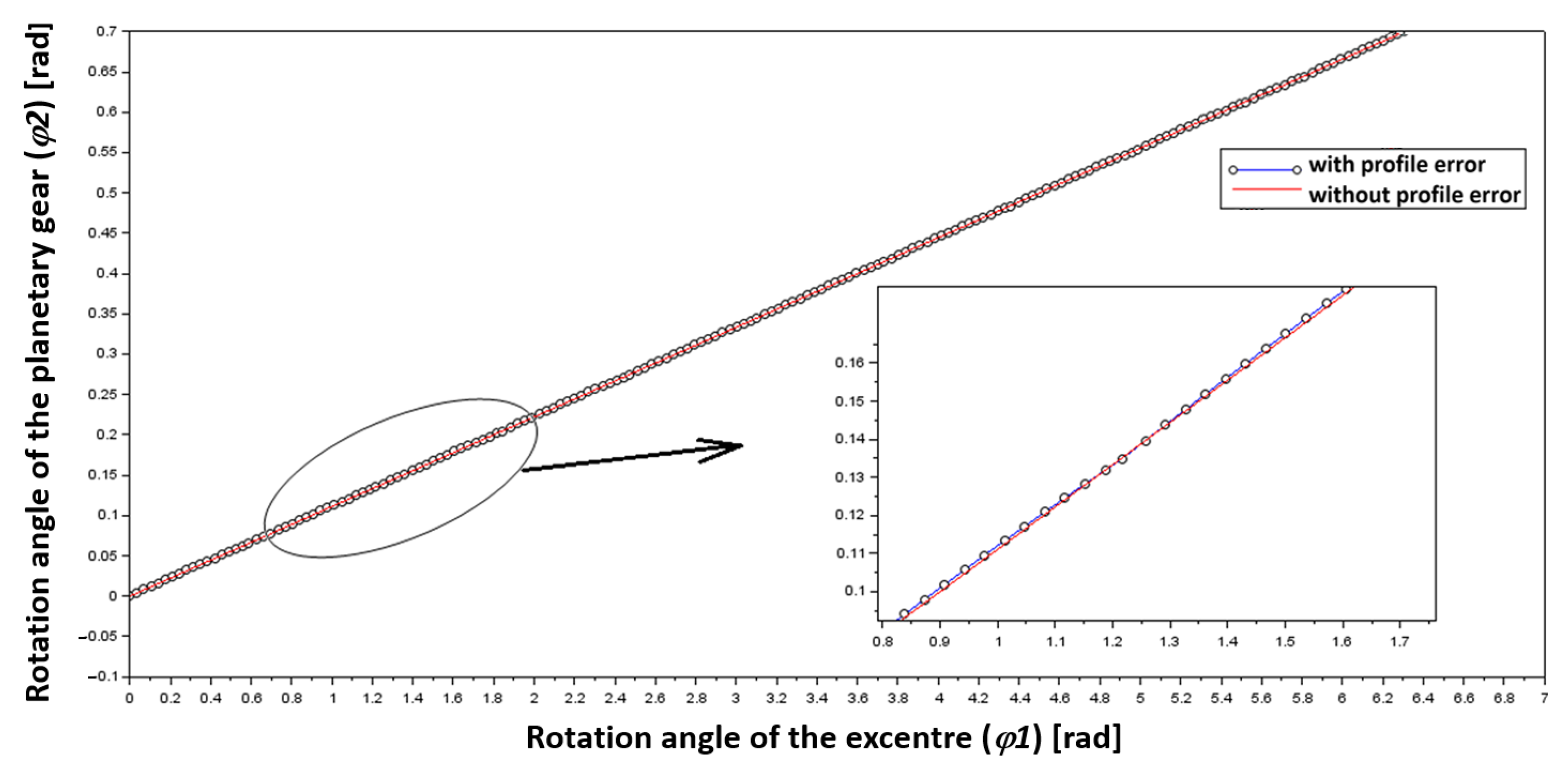
The transmission was determined supposing the rotation of the
eccentric cam in
, in grades of
. Rotation angle figures of the planetary gear aligned to particular rotation angles of the
eccentric cam are shown in the following figure (
Figure 9).
Calculation results are marked with dotted lines, and cases without any failures are marked with continuous lines in the picture. The latter one is a straight line because the transmission is constant. It can be seen in the enlarged segment that they are not identical, which is due to the profile failure.
Knowing the rotation angle of the planetary gear as-signed to the particular rotation angle of the eccentric cam, the transmission change can be established using the equation shown above (8) or through derivation since the following equation applies to both rotation angles.
As shown by the algorithm, the rotation angle of the
input shaft needed for the hit was determined first. It can be seen that pin number 2 hits first (
Figure 9). On the left-hand side of the following image, the gap belonging to certain pins are marked with a circle. The gap size is proportional to the circle diameter. On the right-hand side of the picture, the column diagram also shows the gap size.
This indicates that the transmission is the rise of the curve marked with dotted lines compared to the vertical axis. In this case, this means a numerical derivation according to the following equation:
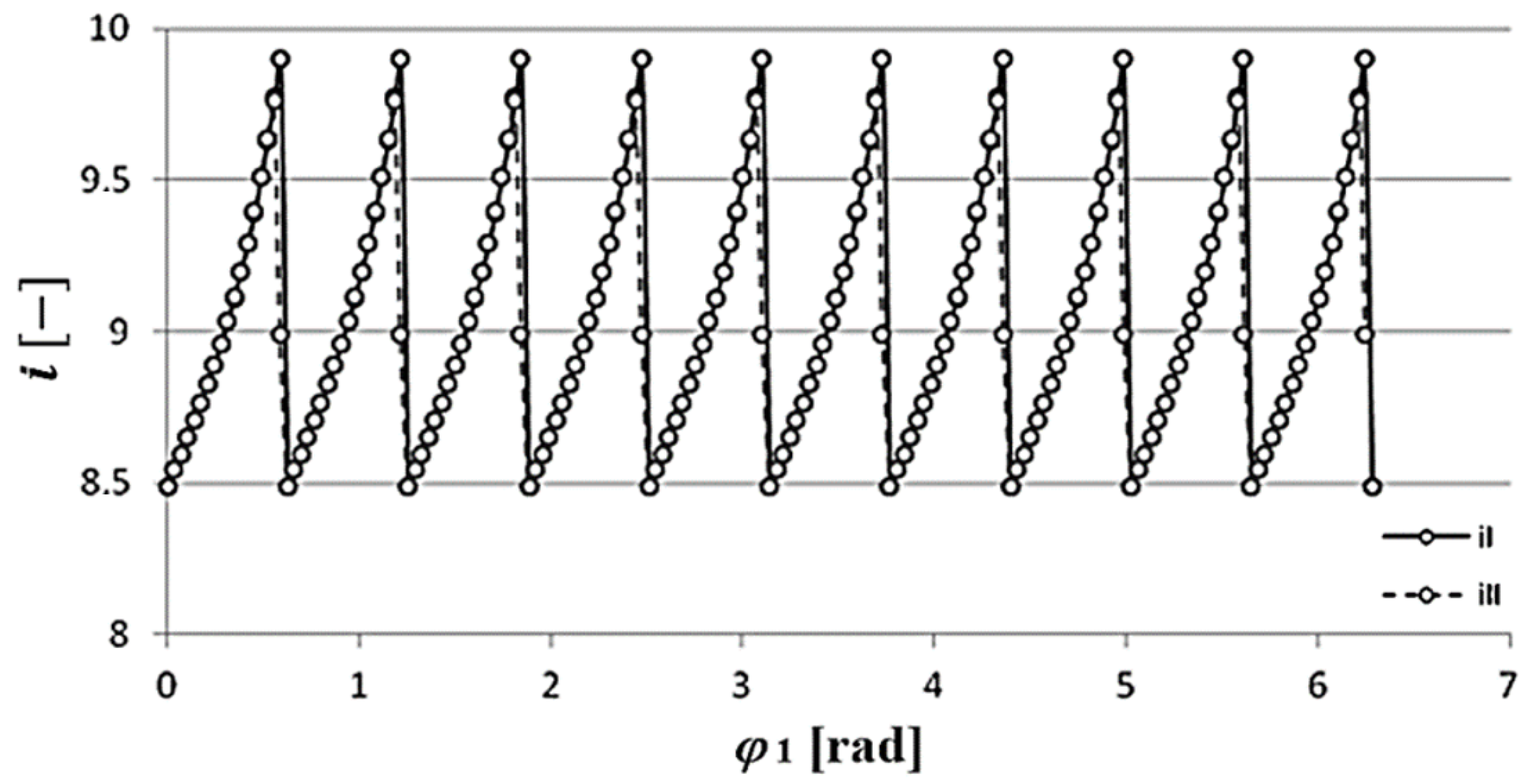
The following diagram shows the transmission change, which was determined in two different ways. The transmission change calculated using Equation
is marked with
, and the change in transmission determined using Equation
is marked with
. The transmission was determined supposing the rotation of the
eccentric cam in
, in grades of
. Rotation angle figures of the planetary gear aligned to particular rotation angles of the
eccentric cam are shown in the following figure (
Figure 10).
It is clearly seen that transmission is not constant, it fluctuates around the value without any failures . Furthermore, the curve describing the transmission change is not continuous. The reason for that is that there is only one cog-pair connection because of the failure, and the connected cog-pairs vary during the movement of the planetary gear. Where the curve is interrupted, cog-pairs leave the connection, and the next cog-pair will determine the motion. Therefore, each segment of the curve belongs to different cog-pairs.
Transmission fluctuations determined in two different ways have brought approximately the same results. The only difference is that the transmission
determined by Equation (
10) does not bring the real result at the points of the function
where the derived figure can not be construed. These points are the maximum points of the above diagram; therefore, it is advisable to use Equation (
11) in the future.
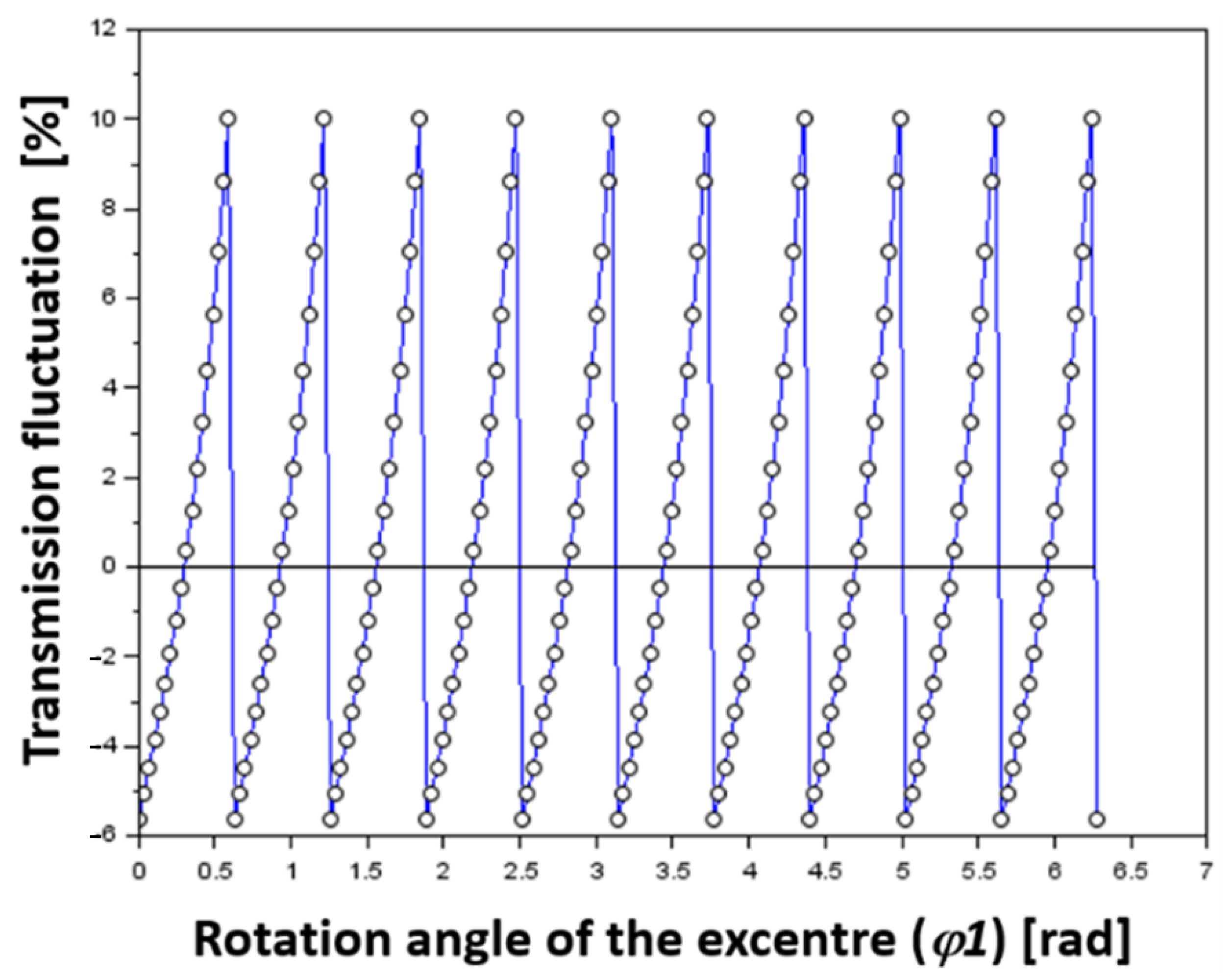
The percentile deviation of the real transmission from the original one can be determined by the following equation:
The deviation calculated by using Equation (
10) is shown in the next figure (
Figure 11).
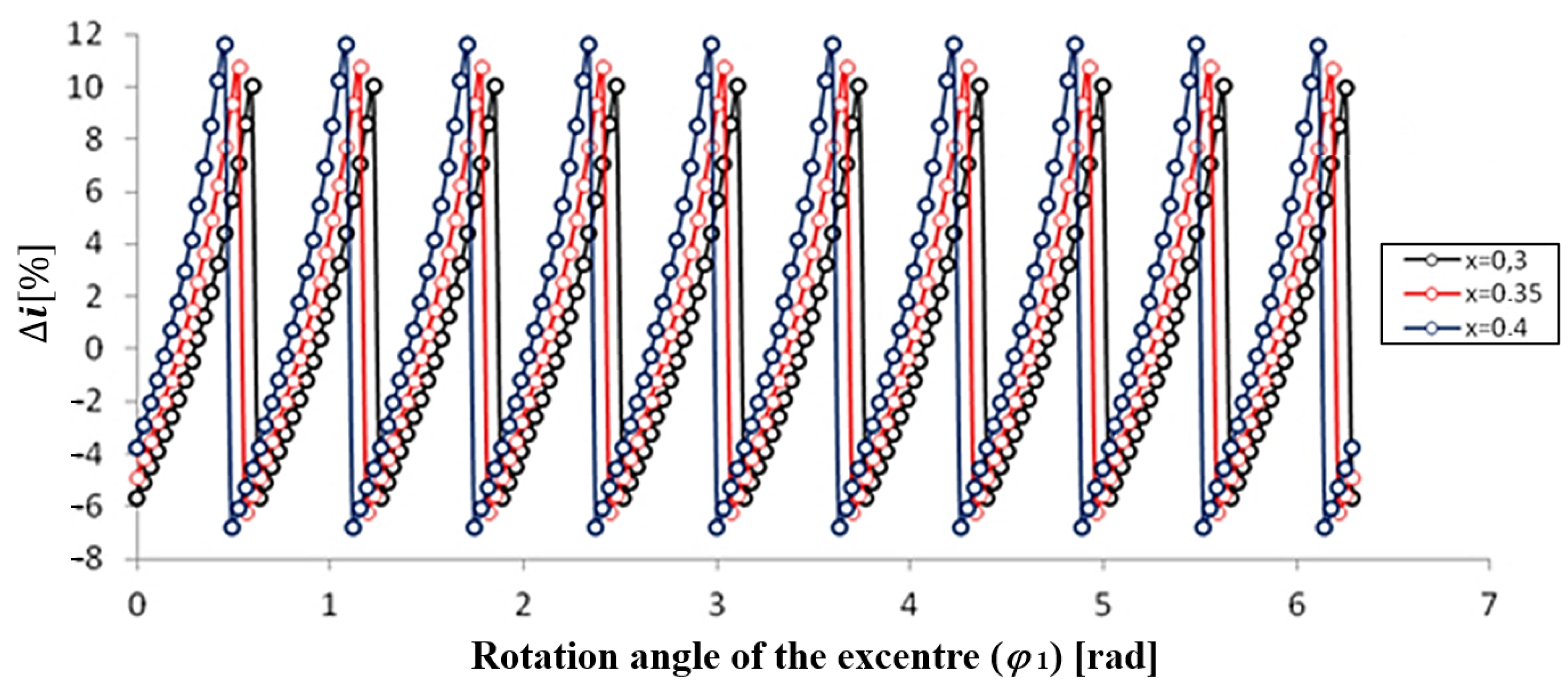
It is important to investigate how further cog parameters affect transmission fluctuation. The percentile transmission fluctuation calculated by using Equation (
10) is shown in the following examples. The impact of the increase of the profile shift coefficient is shown in the next figure (
Figure 12).
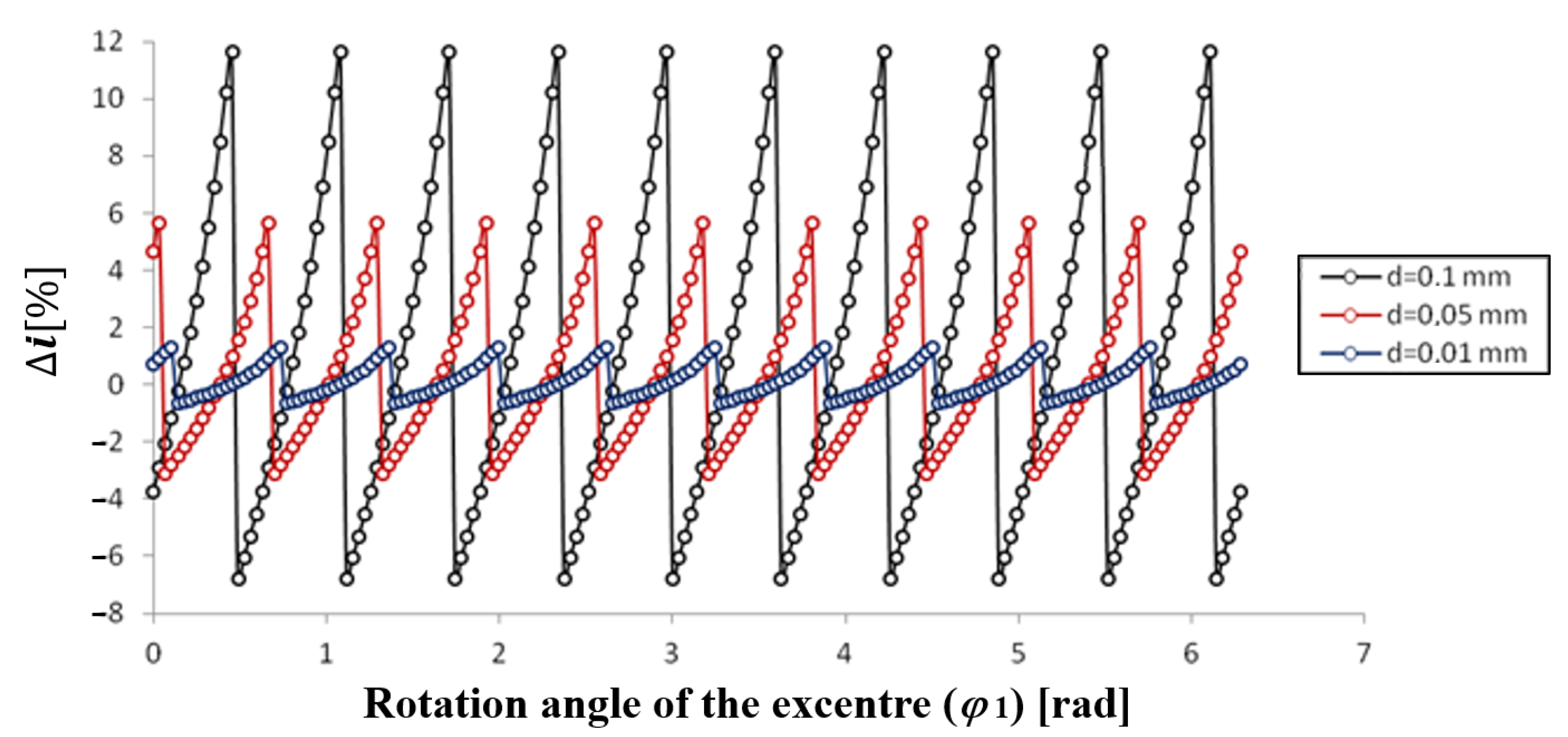
By increasing the profile shift coefficient, the maximum value of transmission fluctuation can be raised. The impact of profile failures on transmission fluctuation is shown in the next diagram (
Figure 13).
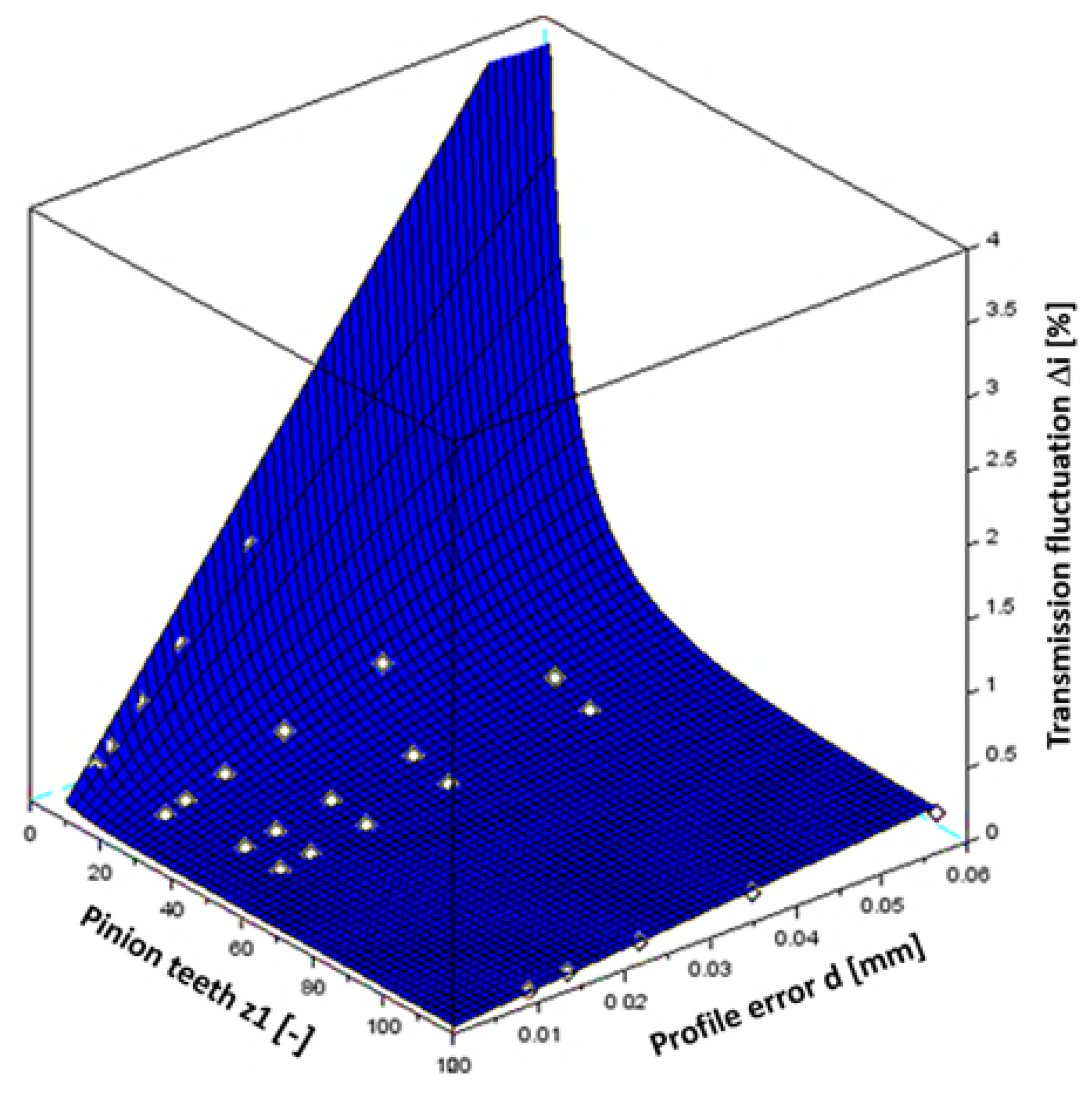
Reduction of the number of profile failures brings the expected result, meaning the transmission fluctuation decreases. The fluctuation decreases at the rate of failure reduction (approximately), i.e., if the failure is reduced by (it decreases from to ), the maximum value of fluctuation also decreases to its tenth.
Curves describing the fluctuation show that the curve will develop as many sections during the complete rotation that suit the cog number of the (4) ring gear. These sections coincide with each other. For this reason, the maximum fluctuation does not need to be determined in consideration of the complete rotation, it is enough to take only one cog-pair into account.
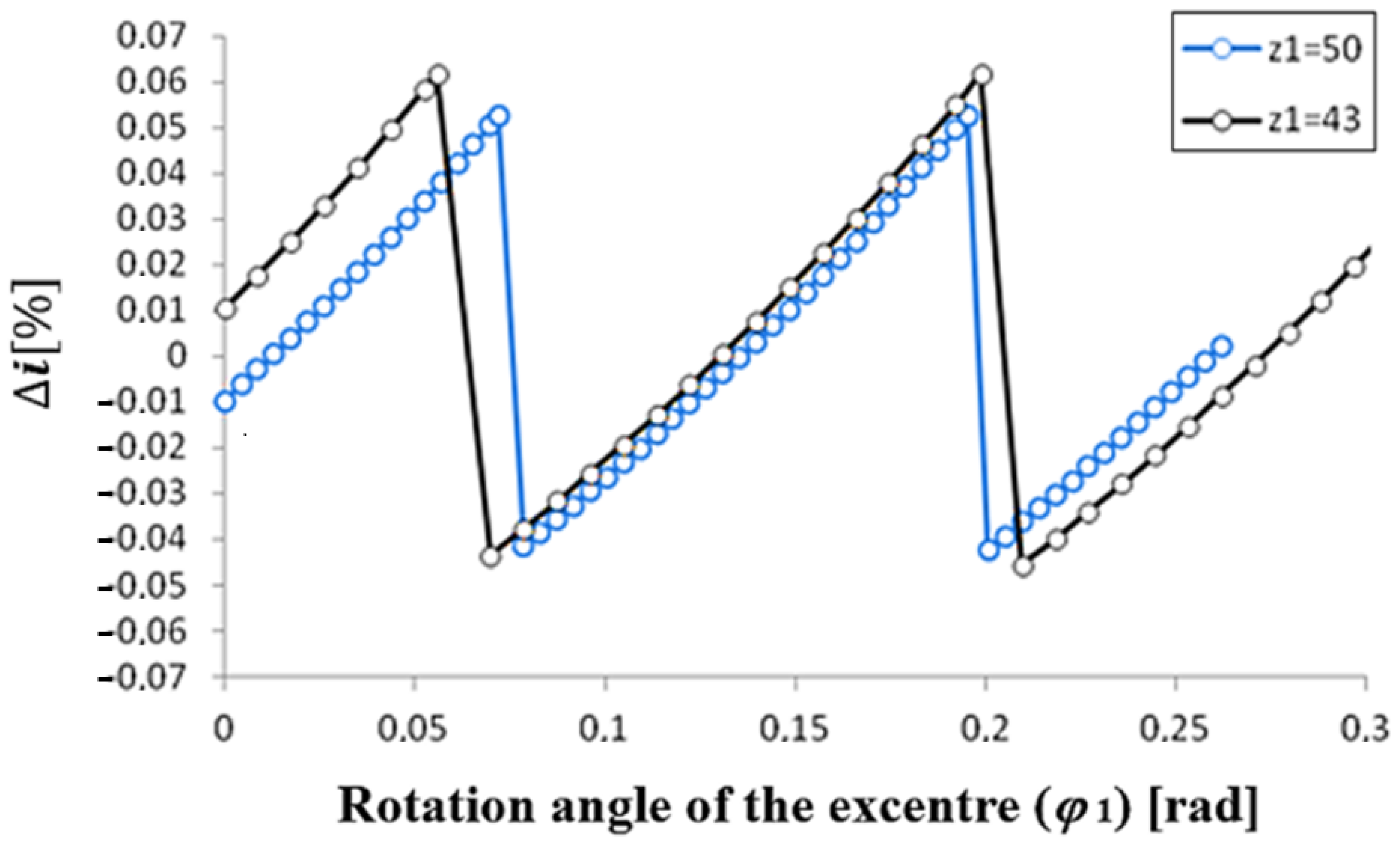
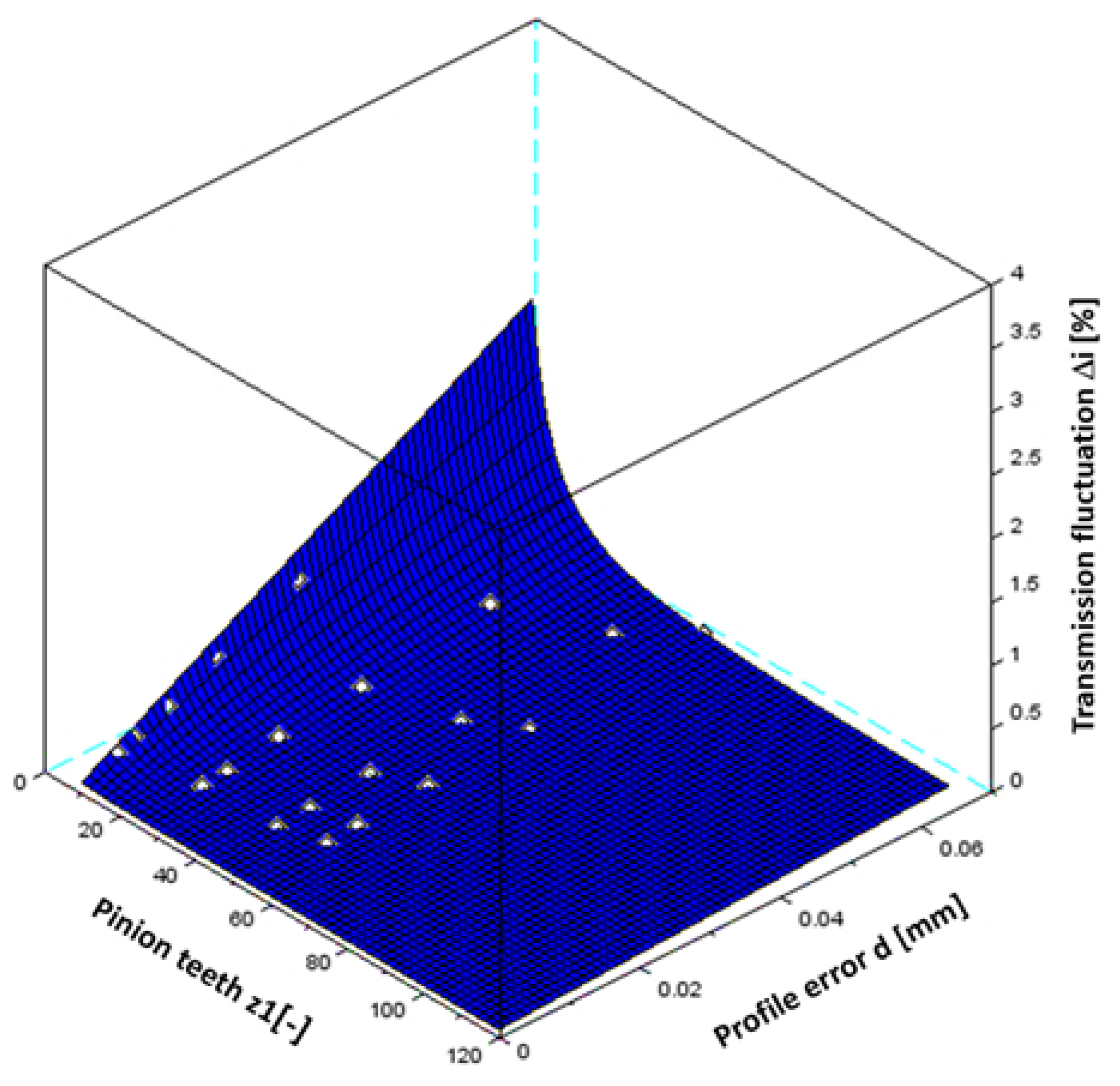
In the case of the same profile failures, the transmission of any change in the cog number modifies the transmission as follows (
Figure 14).




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
