Nonlinear Analysis of Steel Structure Bent Frame Column Bearing Transverse Concentrated Force at the Top in Factory Buildings


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
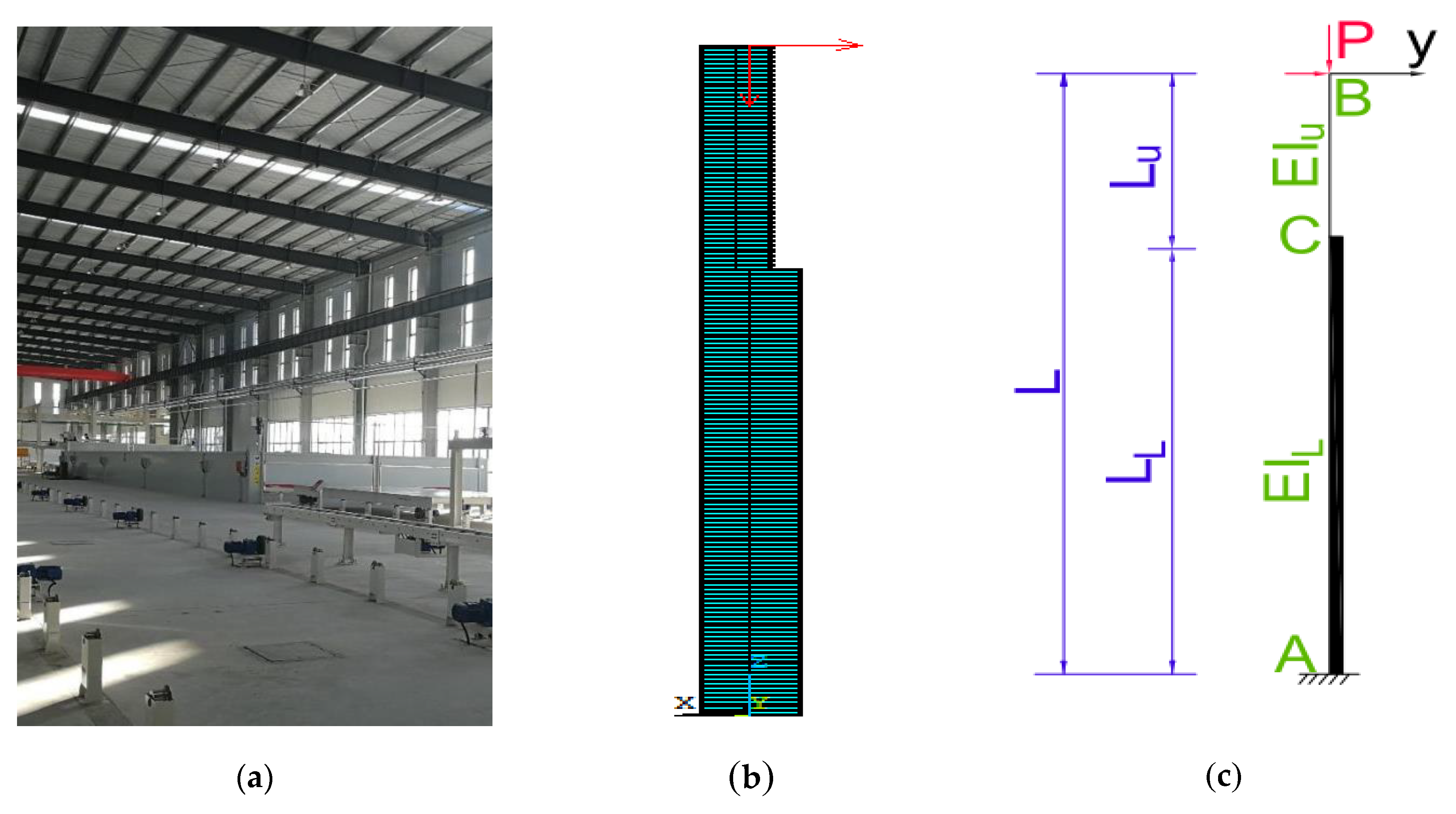
2. Model Simplification
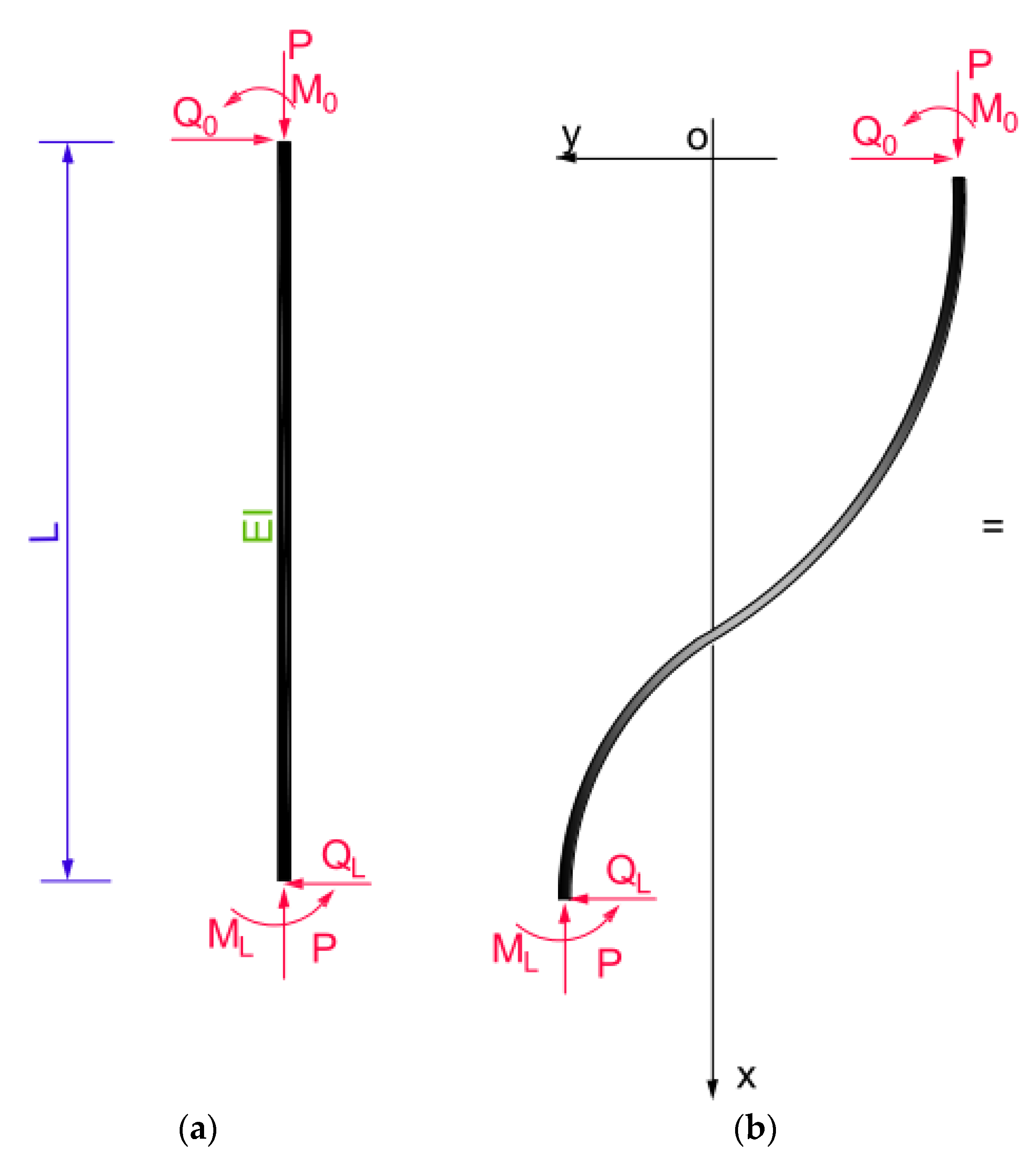
3. Basic Equation of the Model
3.1. Solution of the Differential Equation of the Deflection Curve
3.2. Mechanical Significance of Basic Elements
4. Formula Reduction
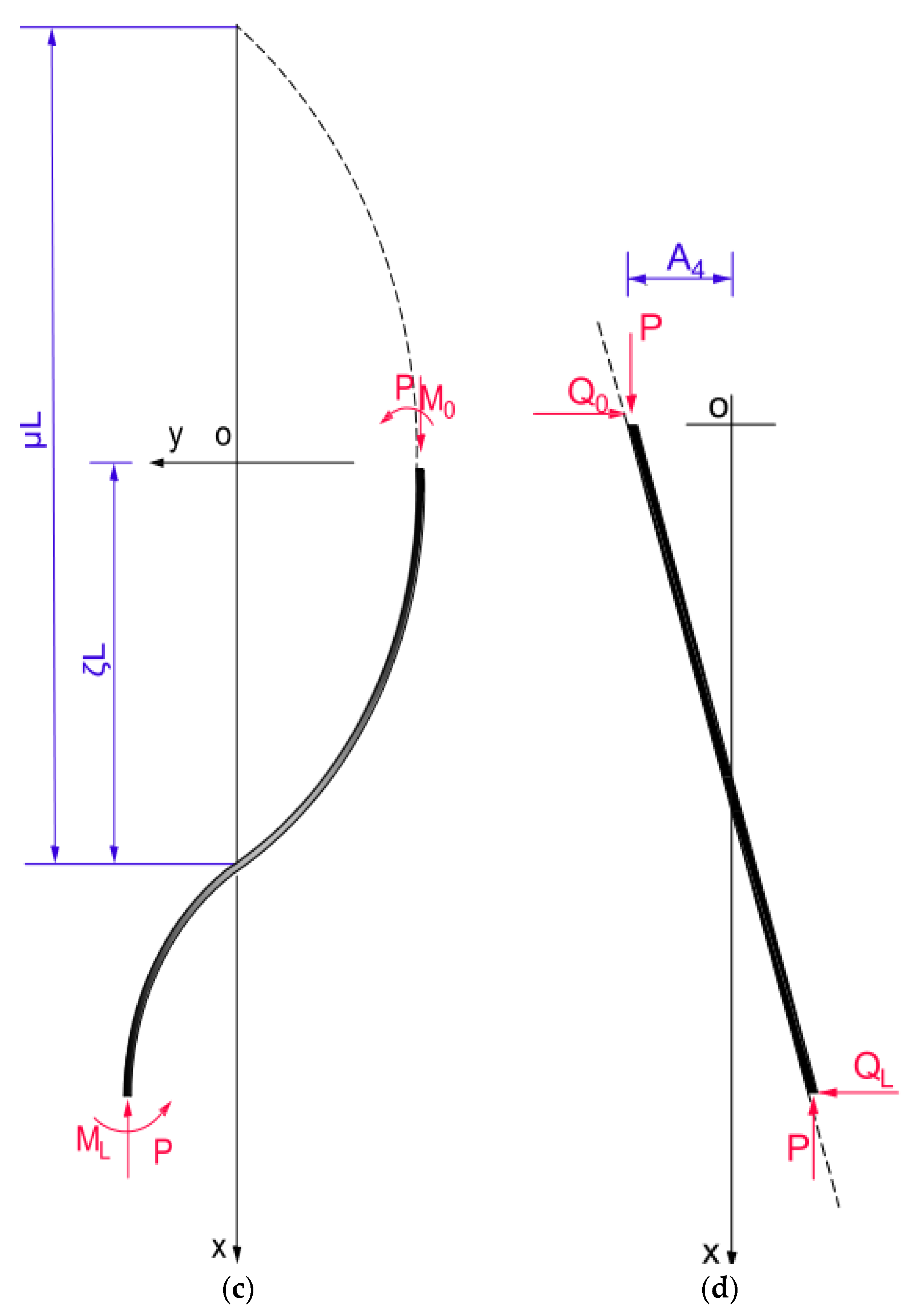
4.1. Analysis of Bending Deformation
4.2. Stability Analysis
4.3. Promotion
5. ANSYS Modeling Analysis
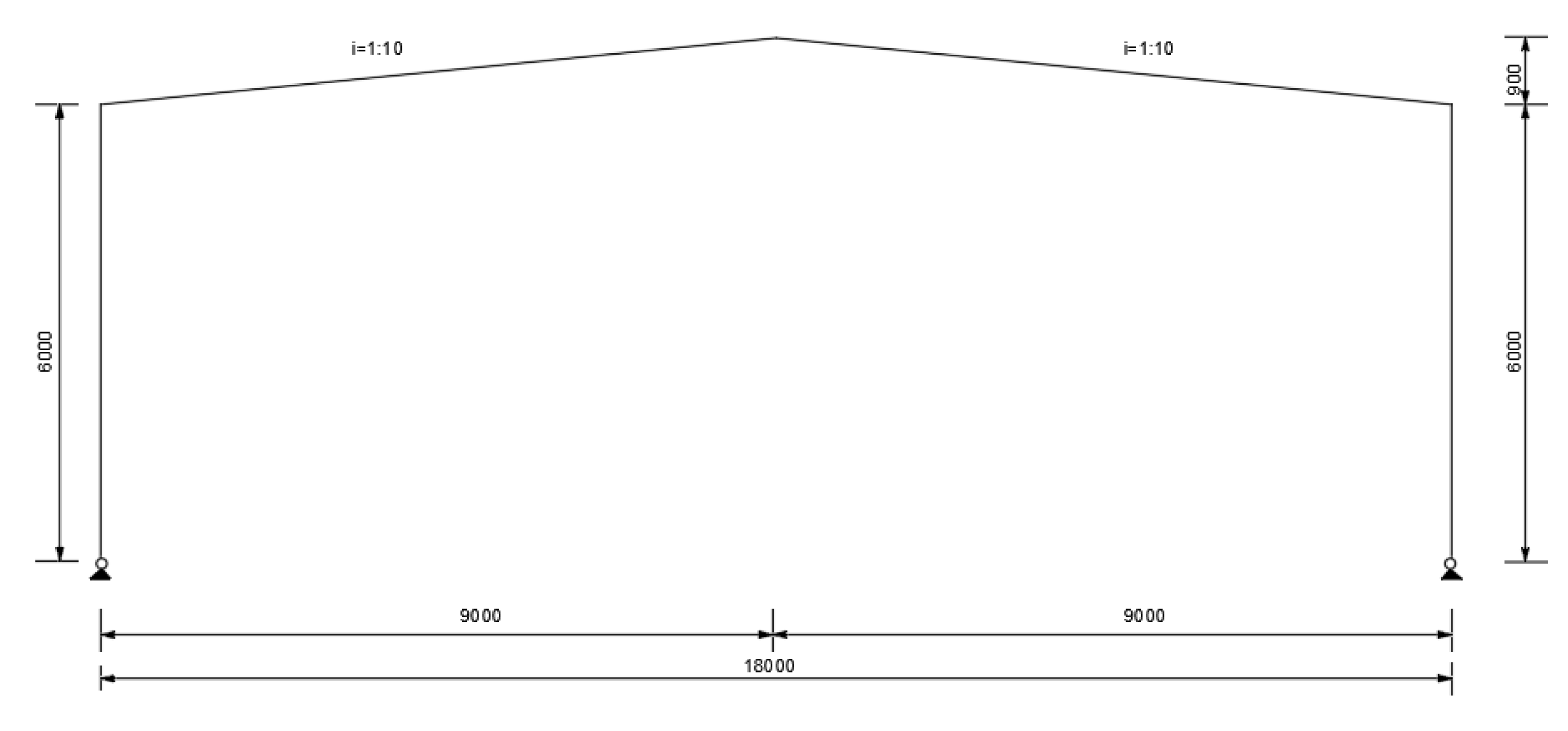
5.1. Model Simplification
5.2. Parameter Selection
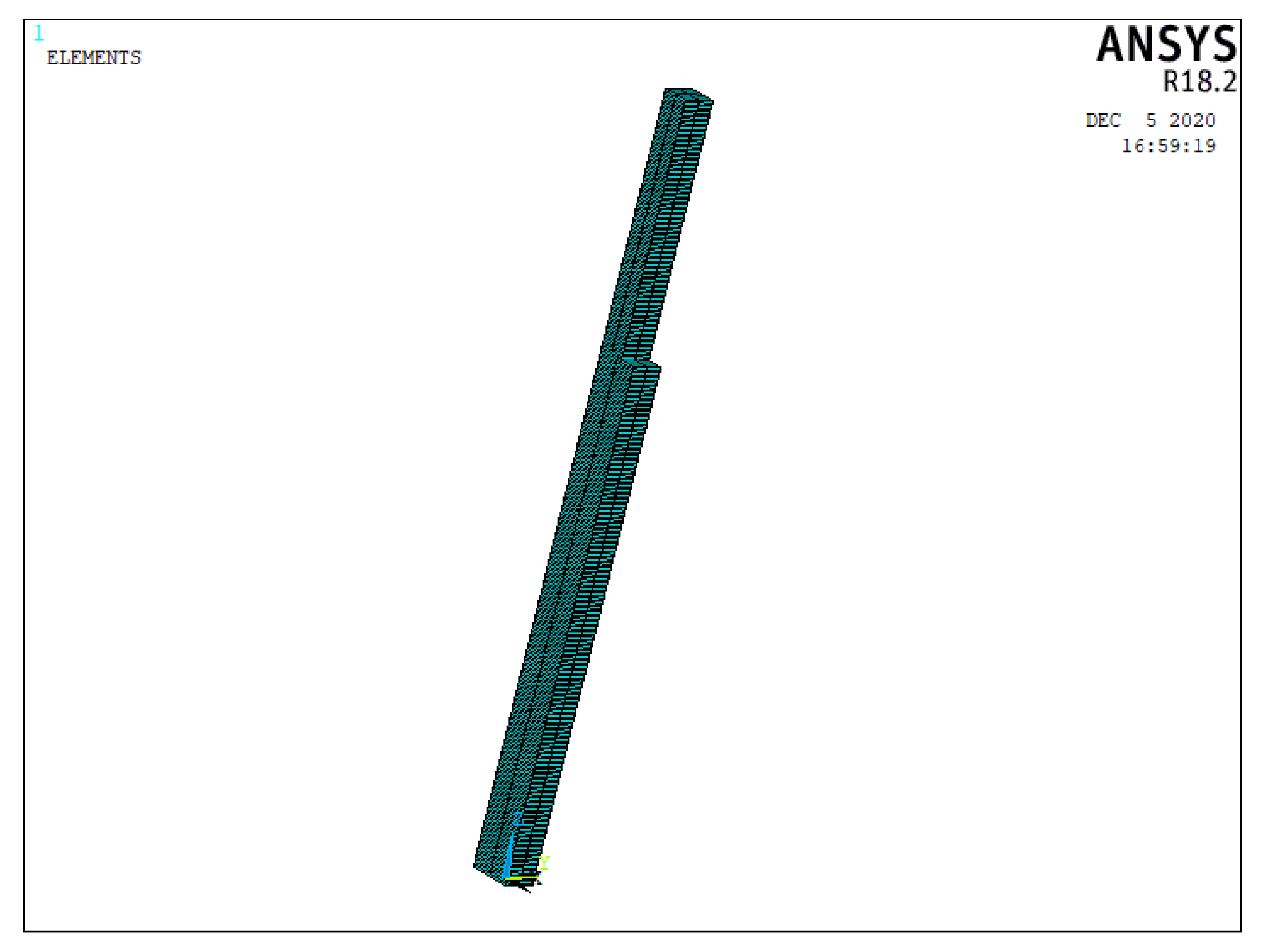
5.3. ANSYS Solid Structure Modeling
- (1)
- Roof dead load: 0.3 KN/m2 (including the dead weight of the profiled steel sheet and purlin).
- (2)
- Roof live load: 0.5 KN/m2.
- (3)
- Horizontal load of crane: Bridge crane with a lifting capacity of 10 t and working system of A3.
- (4)
- Wind load: The basic wind pressure is 0.4 KN/m2 and the ground roughness is class A.
- (5)
- Snow load: The basic snow pressure is 0.2 KN/m2, which is less than the uniform live load on the roof, so it is not considered.
5.4. Comment
6. Result Analysis
6.1. H-Section
6.1.1. Shear Force
6.1.2. Displacement
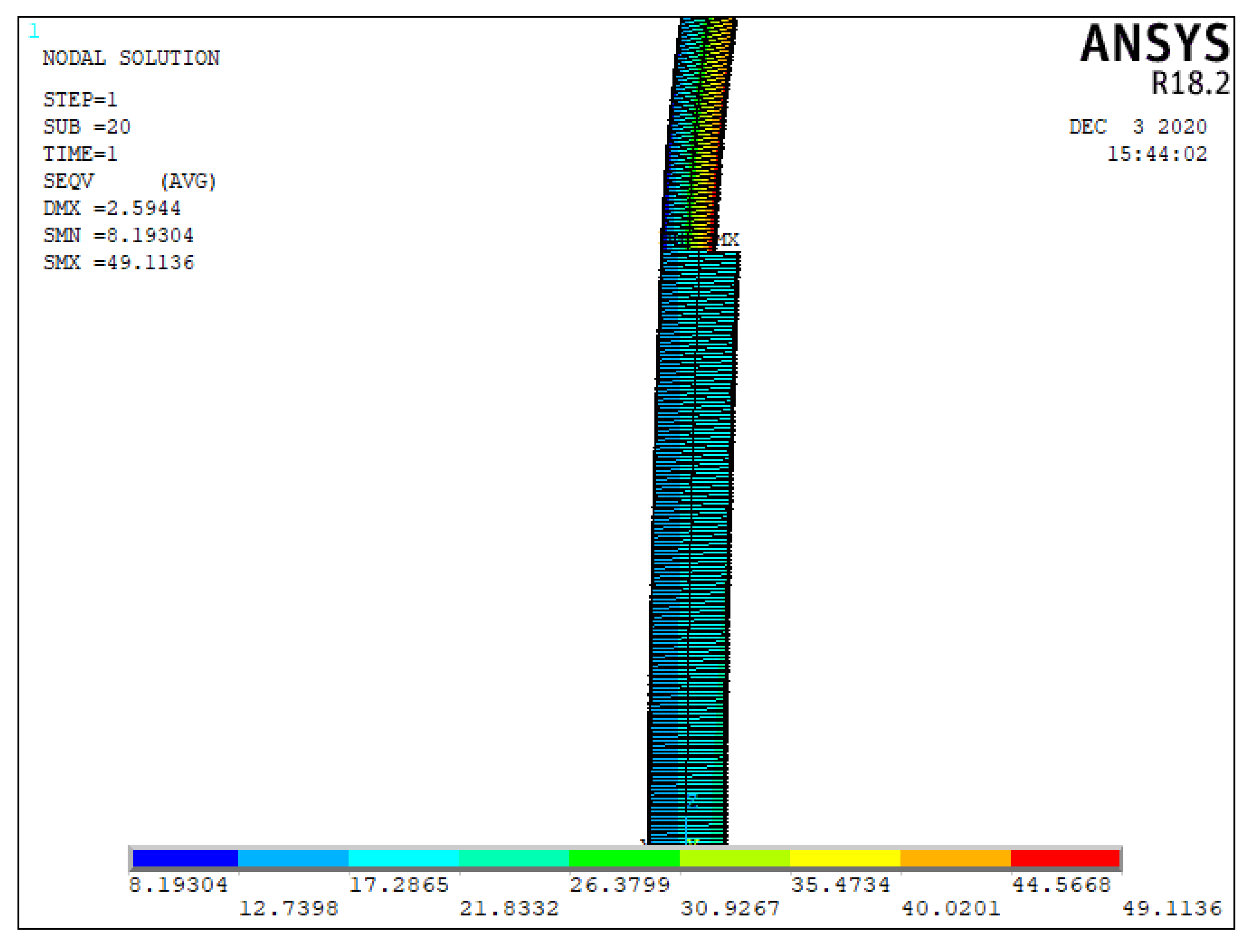
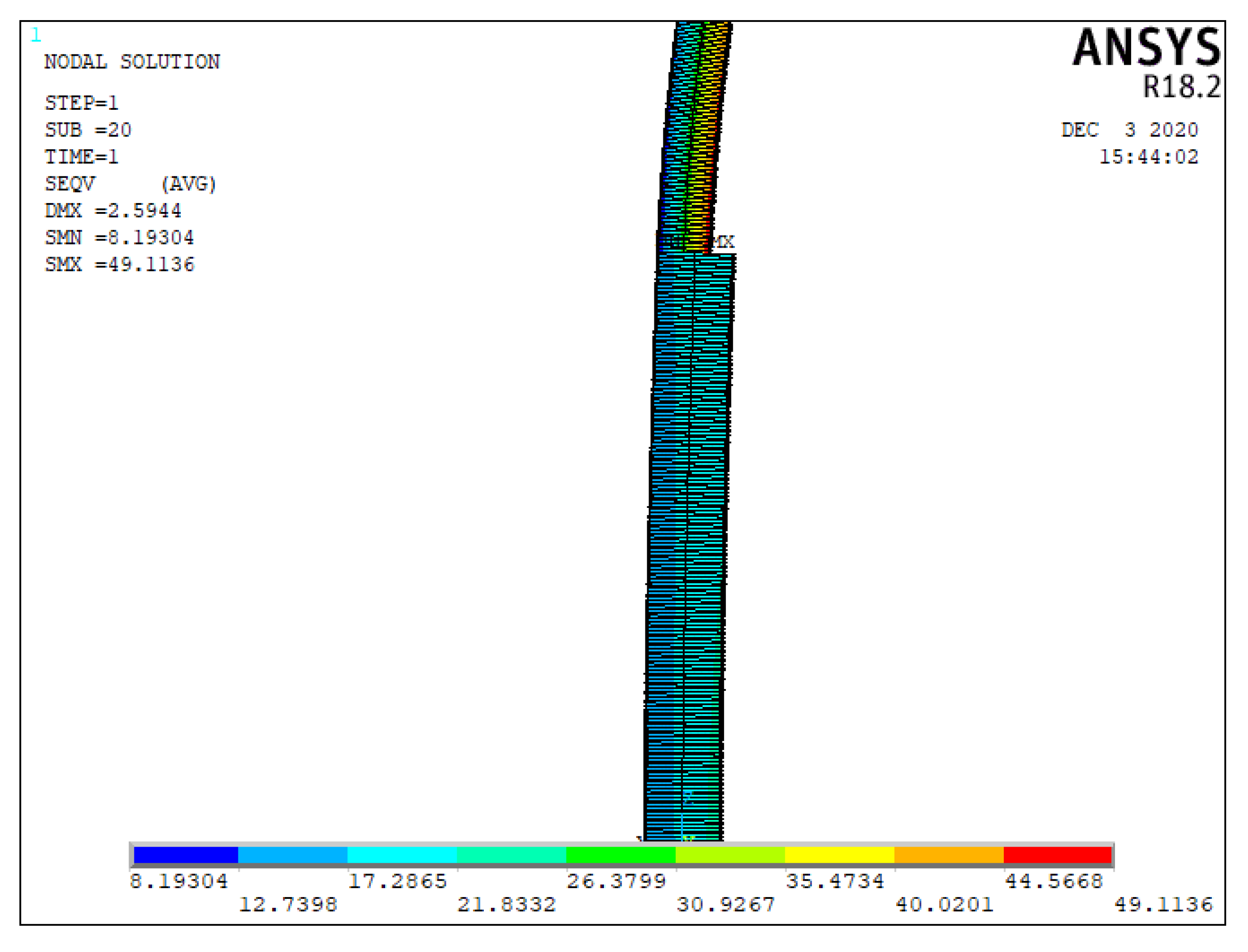
6.1.3. Stress
6.1.4. Summary
6.2. Rectangular Section
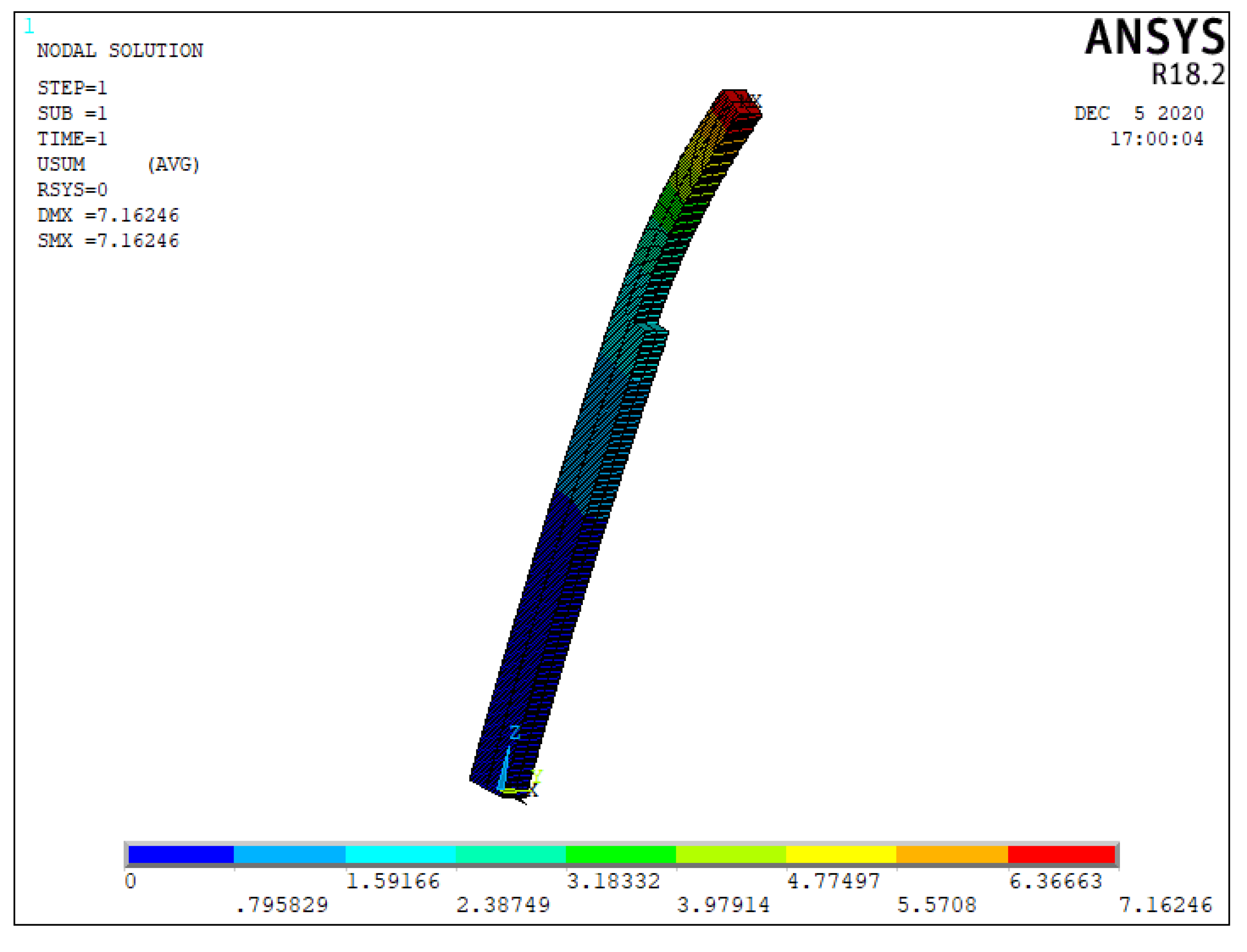
Displacement
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chen, S.F. Effective length of columns with corbel in mill building frames. J. Build. Struct. 2007, 28, 54–60. [Google Scholar]
- Ma, X.Q. Calculation of plane shelving in the design of single-layer workshop. J. Lanzhou Petrochem. Coll. Technol. 2015, 15, 39–42. [Google Scholar]
- Rezaiee-Pajand, R. Stability Analysis of Frame Having FG Tapered Beam-Column. Int. J. Steel Struct. 2019, 19, 446–468. [Google Scholar] [CrossRef]
- Ding, J.G.; Dai, Y.W.; Qiao, Z. Analysis of elastic-plastic responses of a new single-story frame-bent structure during an earthquake based on the transfer matrix method of multibody system. Adv. Mech. Eng. 2013, 5, 452–462. [Google Scholar] [CrossRef] [Green Version]
- Griner, G.M. A parametric solution of the elastic pole-vaulting pole problem. J. Appl. Mech. ASME 1984, 51, 409–414. [Google Scholar] [CrossRef]
- Panayotounakos, D.E. Nonlinear and buckling analysis of continuous bars lying on elastic supports, based on the theory of elastiea. Ing. Arch. 1986, 56, 351–361. [Google Scholar] [CrossRef]
- Duan, Y.; Wang, Y.; Tai, X.C.; Hahn, J. A Fast Augmented Lagrangian Method for Euler’s Elastica Model. In Scale Space and Variational Methods in Computer Vision; Springer: Berlin/Heidelberg, Germany, 2012; pp. 144–156. [Google Scholar]
- Audoly, B.; Callan-Jones, A.; Brun, P.T. Dynamic curling of an Elastica: A nonlinear problem in elastodynamics solved by matched asymptotic expansions. In Extremely Deformable Structures; Springer: Vienna, Austria, 2015; pp. 137–155. [Google Scholar]
- Liu, Y.; Yan, T.; Li, C. Stress and Deflection Analysis of a Complicated Frame Structure with Special-Shaped Columns. In Information Computing and Applications; Springer: Berlin/Heidelberg, Germany, 2010; pp. 282–288. [Google Scholar]
- Jin, M.; Bao, Z.B. An improved proof of instability of some Euler elasticas. J. Elast. 2015, 121, 303–308. [Google Scholar] [CrossRef]
- Yang, Y.B. Research on nonlinear, postbuckling and elasto-plastic analyses of framed structures and curved beams. Meccanica 2020, 1–26. [Google Scholar] [CrossRef]
- Bigoni, D.; Bosi, F.; Misseroni, D.; Dal Corso, F.; Noselli, G. New phenomena in nonlinear elastic structures: From tensile buckling to configurational forces. In Extremely Deformable Structures; Springer: Vienna, Austria, 2015; pp. 55–135. [Google Scholar]
- Mostafa, R.S. Predictive modeling of the lateral drift capacity of circular reinforced concrete columns using an evolutionary algorithm. Eng. Comput. 2019, 1–13. [Google Scholar] [CrossRef]
- Xu, G.S.; Wu, B.; Jia, D.D.; Xu, X.T.; Yang, G. Quasi-static tests of RC columns under variable axial forces and rotations. Eng. Struct. 2018, 162, 60–71. [Google Scholar] [CrossRef]
- Miura, T. Elastic curves and phase transitions. Math. Ann. 2020, 376, 1629–1674. [Google Scholar] [CrossRef] [Green Version]
- Morozov, N.F.; Tovstik, P.E. Dynamic Buckling of a Rod under Longitudinal Load Lower Than the Eulerian Load. Dokl. Ross. Akad. Nauk 2014, 453, 282–285. [Google Scholar]
- Plaut, R.H.; Virgin, L.N. Optimal design of cantilevered elastica for minimum tip deflection under self-weight. Struct. Multidiscip. Optim. 2011, 43, 657–664. [Google Scholar] [CrossRef]
- Farzad, H. Moment Resistance System. In Analysis Procedure for Earthquake Resistant Structures; Springer: Singapore, 2018; pp. 1–226. [Google Scholar]
- Farzad, H. Braced Steel Frame System. In Analysis Procedure for Earthquake Resistant Structures; Springer: Singapore, 2018; pp. 227–340. [Google Scholar]
- Farzad, H. Frames with Shear Wall. In Analysis Procedure for Earthquake Resistant Structures; Springer: Singapore, 2018; pp. 341–448. [Google Scholar]
- Vetyukov, Y.; Schmidrathner, C. A rod model for large bending and torsion of an elastic strip with a geometrical imperfection. Acta Mech. 2019, 230, 4061–4075. [Google Scholar] [CrossRef] [Green Version]
- Gao, K.; Gao, W.; Wu, D. Nonlinear dynamic stability analysis of Euler–Bernoulli beam–columns with damping effects under thermal environment. Nonlinear Dyn. 2017, 90, 2423–2444. [Google Scholar] [CrossRef]
- Belyaev, A.K.; Morozov, N.F.; Tovstik, P.E. Buckling problem for a rod longitudinally compressed by a force smaller than the Euler critical force. Mech. Solids 2016, 51, 263–272. [Google Scholar] [CrossRef]
- Castaldo, P.; Gino, D.; Mancini, G. Safety formats for nonlinear finite element analysis of reinforced concrete structures: Discussion, comparison and proposals. Eng. Struct. 2019, 193, 136–153. [Google Scholar] [CrossRef]
- Yin, L. Elementary discussion on calculation of support between columns of single-story and multi-span concrete bent factory buildings. City Build. 2014, 4, 58–71. [Google Scholar]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Wang, L.; Weng, Y.; Qin, P.; Li, G. Nonlinear Analysis of Steel Structure Bent Frame Column Bearing Transverse Concentrated Force at the Top in Factory Buildings. Metals 2020, 10, 1664. https://doi.org/10.3390/met10121664
Li C, Wang L, Weng Y, Qin P, Li G. Nonlinear Analysis of Steel Structure Bent Frame Column Bearing Transverse Concentrated Force at the Top in Factory Buildings. Metals. 2020; 10(12):1664. https://doi.org/10.3390/met10121664
Chicago/Turabian StyleLi, Chunbao, Lina Wang, Yongmei Weng, Pengju Qin, and Gaojie Li. 2020. "Nonlinear Analysis of Steel Structure Bent Frame Column Bearing Transverse Concentrated Force at the Top in Factory Buildings" Metals 10, no. 12: 1664. https://doi.org/10.3390/met10121664
APA StyleLi, C., Wang, L., Weng, Y., Qin, P., & Li, G. (2020). Nonlinear Analysis of Steel Structure Bent Frame Column Bearing Transverse Concentrated Force at the Top in Factory Buildings. Metals, 10(12), 1664. https://doi.org/10.3390/met10121664