
Actuating a Magnetic Shape Memory Element Locally with a Set of Coils


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
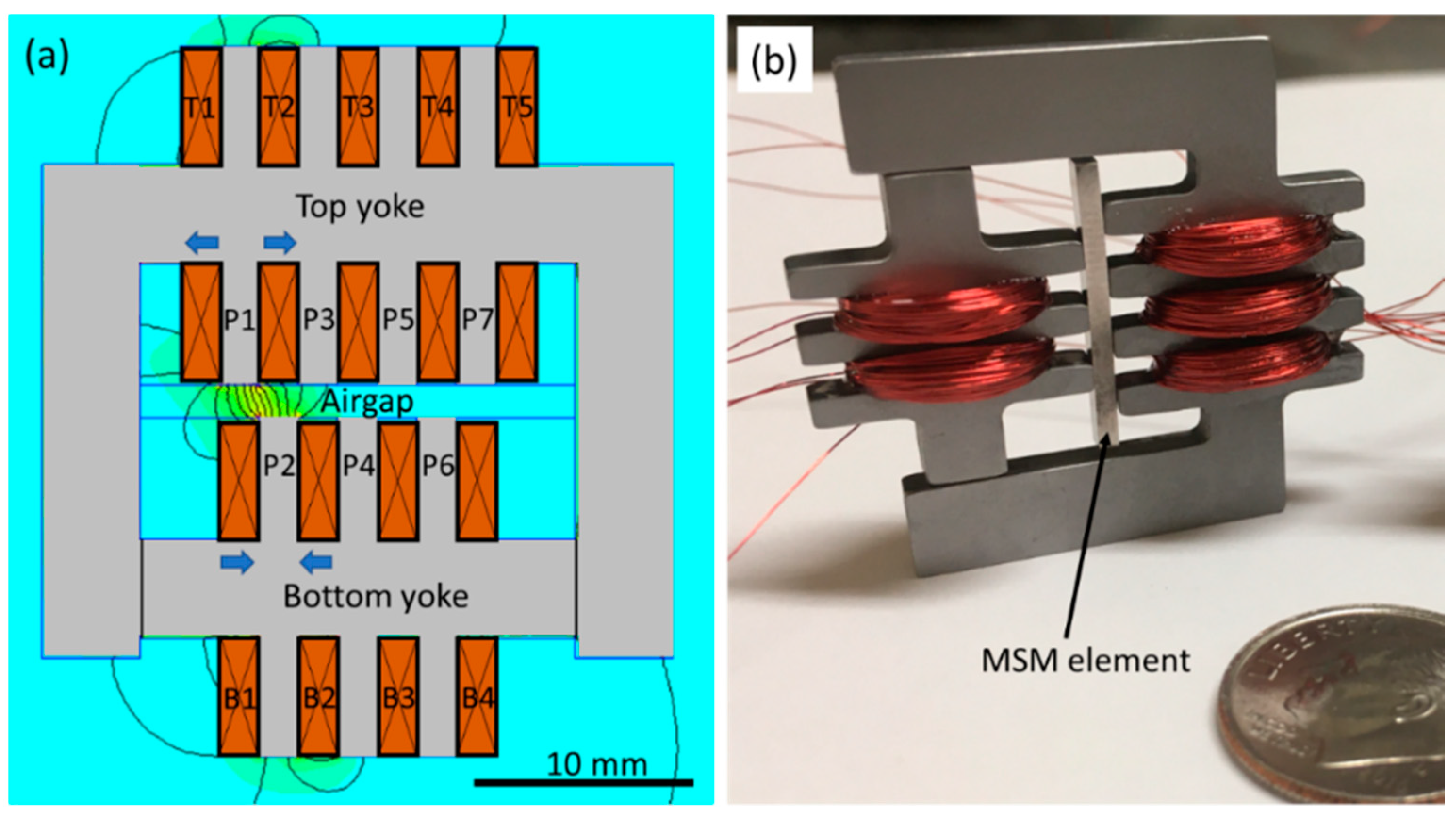
2.1. Device Design
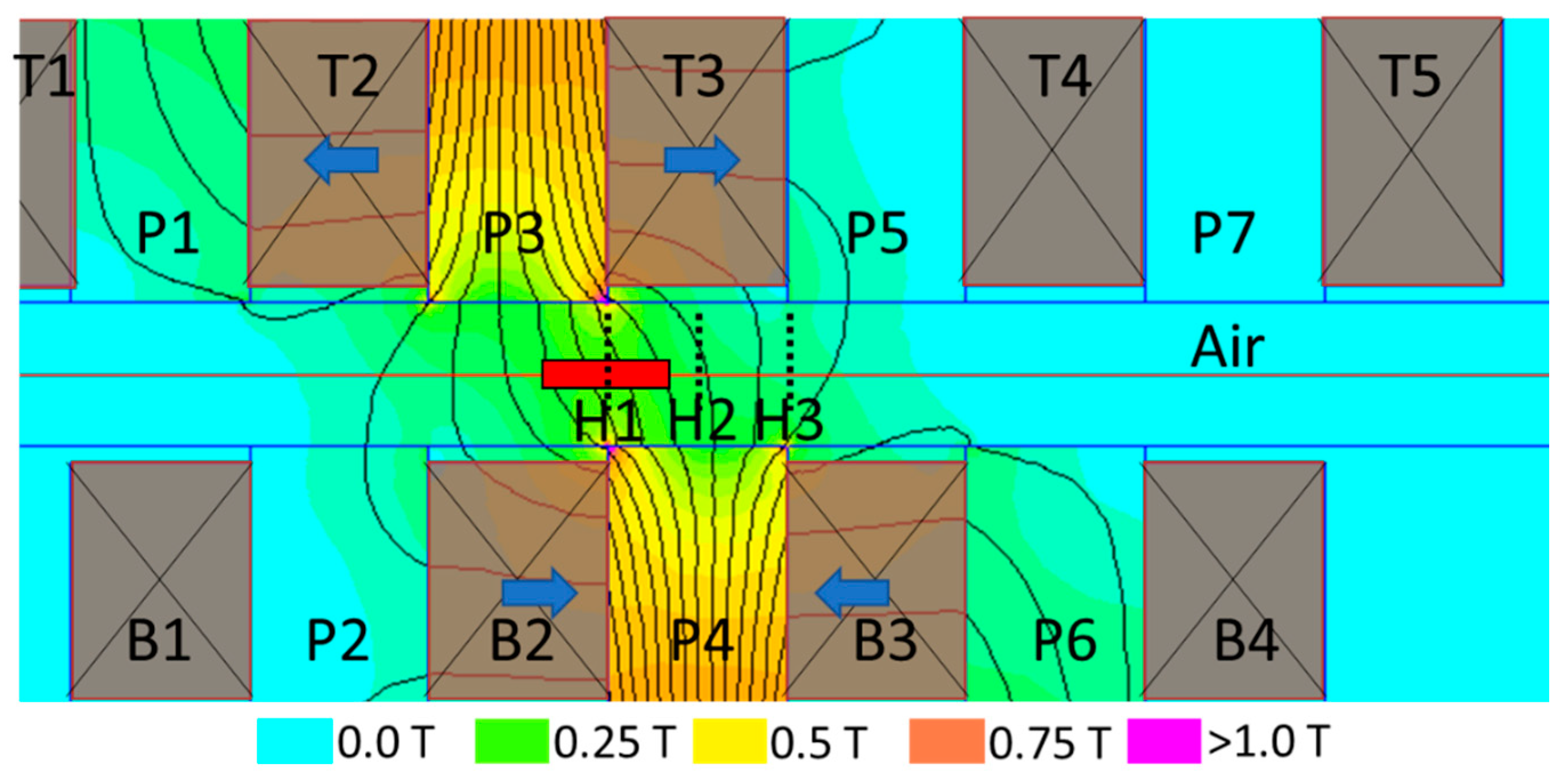
2.2. Magnetic Circuits and Magnetic Field Propagation
- (B2, B3) N, (T2, T3) S
- (B2, B3) N, (T2, T4) S
- (B2, B3) N, (T3, T4) S
- (B2, B4) N, (T3, T4) S
- (B3, B4) N, (T3, T4) S which begins the next elementary sequence.
2.3. Magnetic Measurements
2.4. Actuation with MSM Element
3. Finite Element Analysis
3.1. Simulated Cases
3.2. Magnetic Field Energy
4. Results
4.1. Device Measurements
4.2. FEMM Simulation
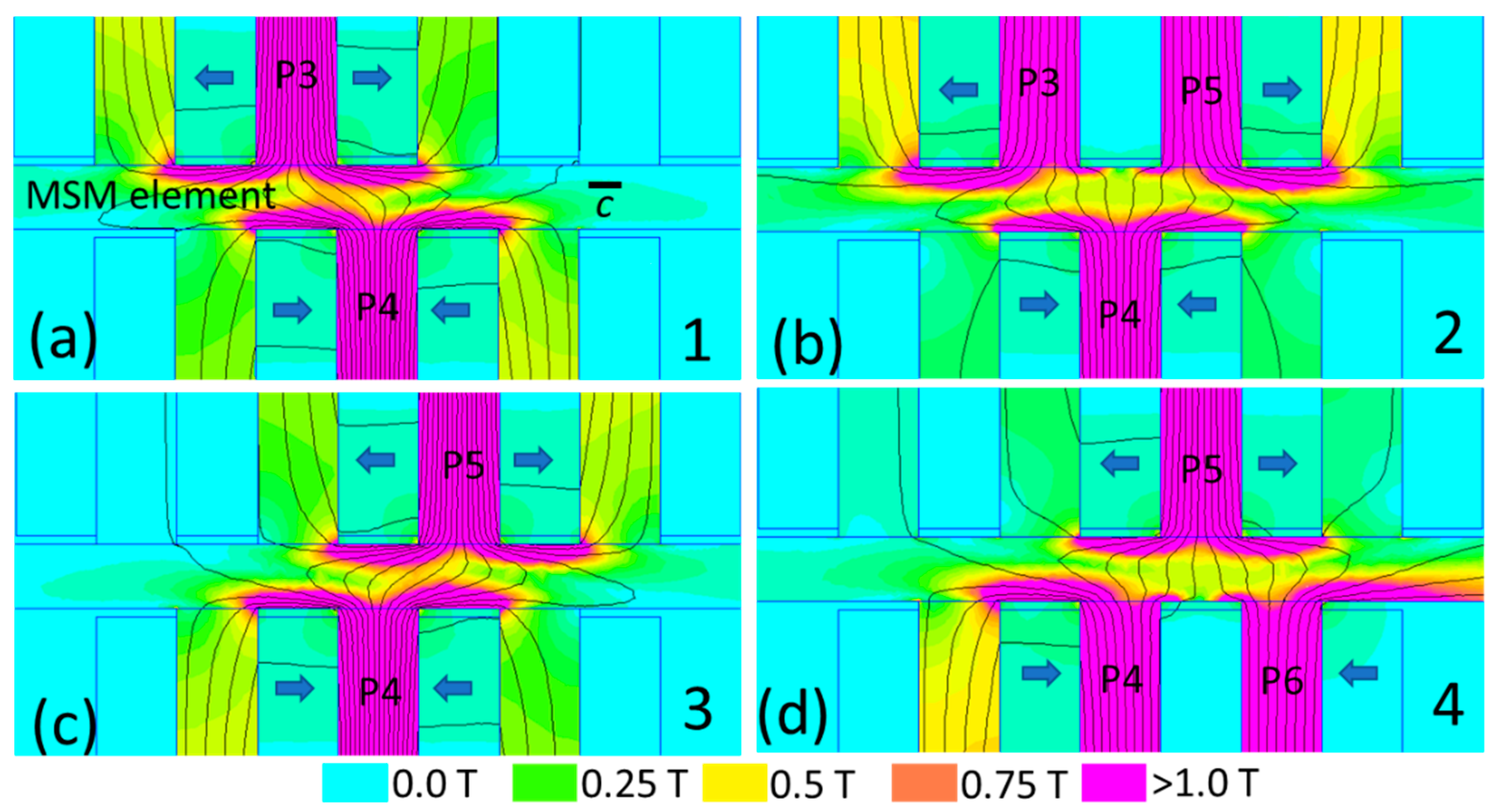
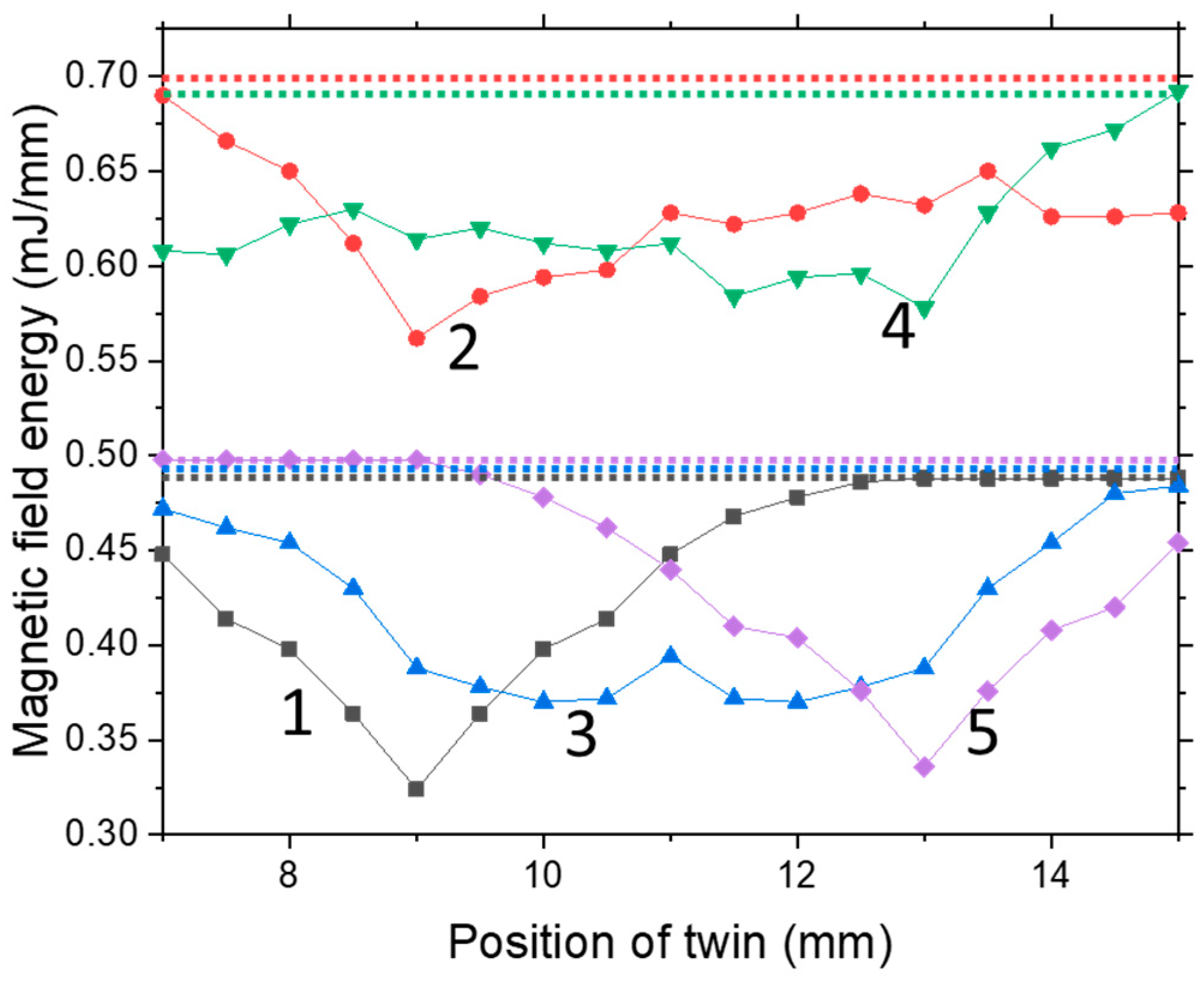
4.2.1. MSM Element with a Twin
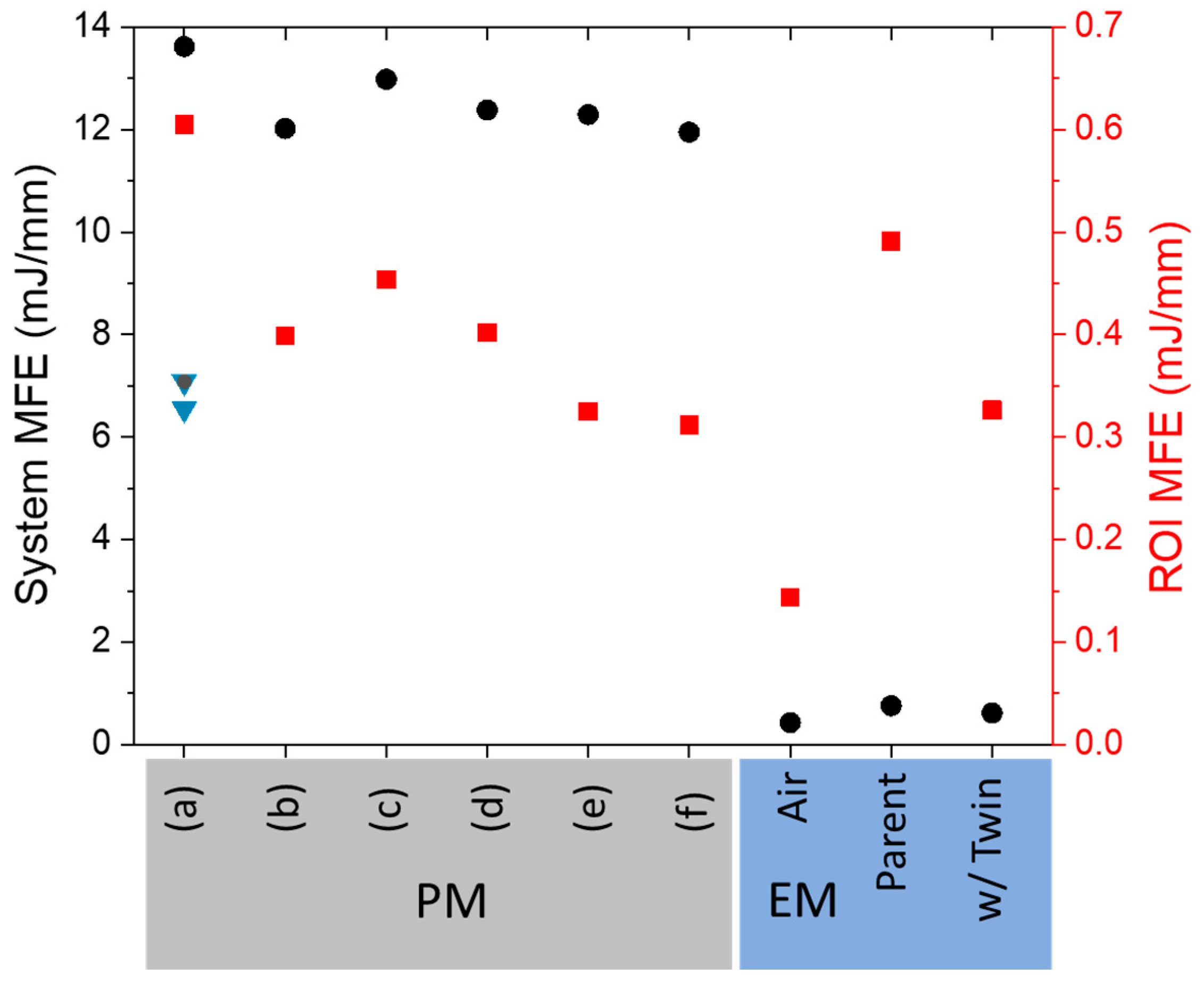
4.2.2. Simulation of Magnetic Field Energies (MFE)
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Costanza, G.; Stefano, P.; Maria, E.T. IR Thermography and Resistivity Investigations on Ni-Ti Shape Memory Alloy. Key Eng. Mater. 2014, 605, 23–26. [Google Scholar] [CrossRef]
- Lin, Y.C.; Lin, C.F. Microstructures and magnetic properties of Fe–Ga and Fe–Ga–V ferromagnetic shape memory alloys. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Kuchin, D.; Elvina, D.; Yurii, K.k.; Alexander, K.; Victor, K.; Alexey, M.; Vladimir, S.; Jacek, C.; Krzysztof, R.; Vladimir, K. Direct measurement of shape memory effect for Ni54Mn21Ga25, Ni50Mn41. 2In8. 8 Heusler alloys in high magnetic field. J. Magn. Magn. Mater. 2019, 482, 317–322. [Google Scholar] [CrossRef]
- Suorsa, I.; Tellinen, J.; Ullakko, K.; Pagounis, E. Voltage generation induced by mechanical straining in magnetic shape memory materials. J. Appl. Phys. 2004, 95, 8054–8058. [Google Scholar] [CrossRef] [Green Version]
- Lindquist, P.; Hobza, T.; Patrick, C.; Müllner, P. Efficiency of Energy Harvesting in Ni–Mn–Ga Shape Memory Alloys. Shape Mem. Superelasticity 2018, 4, 93–101. [Google Scholar] [CrossRef]
- Karaman, I.; Basaran, B.; Karaca, H.E.; Karsilayan, A.I.; Chumlyakov, Y.I. Energy harvesting using martensite variant reorientation mechanism in a NiMnGa magnetic shape memory alloy. Appl. Phys. Lett. 2007, 90. [Google Scholar] [CrossRef]
- Ullakko, K.; Wendell, L.; Smith, A.; Mullner, P.; Hampikian, G. A magnetic shape memory micropump: Contact-free, and compatible with PCR and human DNA profiling. Smart Mater. Struct. 2012, 21. [Google Scholar] [CrossRef]
- Saren, A.; Smith, A.R.; Ullakko, K. Integratable magnetic shape memory micropump for high-pressure, precision microfluidic applications. Microfluid. Nanofluid. 2018, 22. [Google Scholar] [CrossRef]
- Smith, A.R.; Saren, A.; Jarvinen, J.; Ullakko, K. Characterization of a high-resolution solid-state micropump that can be integrated into microfluidic systems. Microfluid. Nanofluid. 2015, 18, 1255–1263. [Google Scholar] [CrossRef]
- Ullakko, K. Magnetically controlled shape memory alloys: A new class of actuator materials. J. Mater. Eng. Perform. 1996, 5, 405–409. [Google Scholar] [CrossRef]
- Armstrong, A.; Karki, B.; Smith, A.; Müllner, P. Traveling Surface Undulation on a Ni-Mn-Ga Single Crystal Element. Submitted for Publication. Available online: https://core.ac.uk/download/pdf/334778582.pdf#page=127 (accessed on 23 February 2021).
- Smith, A.; Tellinen, J.; Mullner, P.; Ullakko, K. Controlling twin variant configuration in a constrained Ni-Mn-Ga sample using local magnetic fields. Scr. Mater. 2014, 77, 68–70. [Google Scholar] [CrossRef]
- Armstrong, A.; Finn, K.; Hobza, A.; Lindquist, P.; Rafla, N.; Mullner, P. A motionless actuation system for magnetic shape memory devices. Smart Mater. Struct. 2017, 26. [Google Scholar] [CrossRef] [Green Version]
- Jiles, D. Introduction to Magnetism and Magnetic Materials; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Kellis, D.; Smith, A.; Ullakko, K.; Mullner, P. Oriented single crystals of Ni-Mn-Ga with very low switching field. J. Cryst. Growth 2012, 359, 64–68. [Google Scholar] [CrossRef]
- Schiepp, T.; Maier, M.; Pagounis, E.; Schluter, A.; Laufenberg, M. FEM-Simulation of Magnetic Shape Memory Actuators. IEEE Trans. Magn. 2014, 50. [Google Scholar] [CrossRef]
- Gómez, E.; Roger-Folch, J.; Molina, A.; Fuentes, J.A.; Gabaldón, A.; Torres, R. Modelling of magnetic anisotropy in the finite element method. COMPEL 2006, 25, 609–615. [Google Scholar] [CrossRef]
- Heczko, O.; Straka, L.; Lanska, N.; Ullakko, K.; Enkovaara, J. Temperature dependence of magnetic anisotropy in Ni-Mn-Ga alloys exhibiting giant field-induced strain. J. Appl. Phys. 2002, 91, 8228–8230. [Google Scholar] [CrossRef] [Green Version]
- Suorsa, I.; Pagounis, E.; Ullakko, K. Position dependent inductance based on magnetic shape memory materials. Sens. Actuators a-Phys. 2005, 121, 136–141. [Google Scholar] [CrossRef]
- Meeker, D. Finite Element Method Magnetics—Version 4.0 User’s Manual; University of Virginia: Charlottesville, VA, USA, 2006. [Google Scholar]
- Suorsa, I.; Pagounis, E.; Ullakko, K. Magnetization dependence on strain in the Ni-Mn-Ga magnetic shape memory material. Appl. Phys. Lett. 2004, 84, 4658–4660. [Google Scholar] [CrossRef] [Green Version]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Armstrong, A.; Müllner, P. Actuating a Magnetic Shape Memory Element Locally with a Set of Coils. Metals 2021, 11, 536. https://doi.org/10.3390/met11040536
Armstrong A, Müllner P. Actuating a Magnetic Shape Memory Element Locally with a Set of Coils. Metals. 2021; 11(4):536. https://doi.org/10.3390/met11040536
Chicago/Turabian StyleArmstrong, Andrew, and Peter Müllner. 2021. "Actuating a Magnetic Shape Memory Element Locally with a Set of Coils" Metals 11, no. 4: 536. https://doi.org/10.3390/met11040536
APA StyleArmstrong, A., & Müllner, P. (2021). Actuating a Magnetic Shape Memory Element Locally with a Set of Coils. Metals, 11(4), 536. https://doi.org/10.3390/met11040536