
Application of Machine Learning for Data with an Atmospheric Corrosion Monitoring Sensor Based on Strain Measurements



Abstract
:1. Introduction
2. Methods
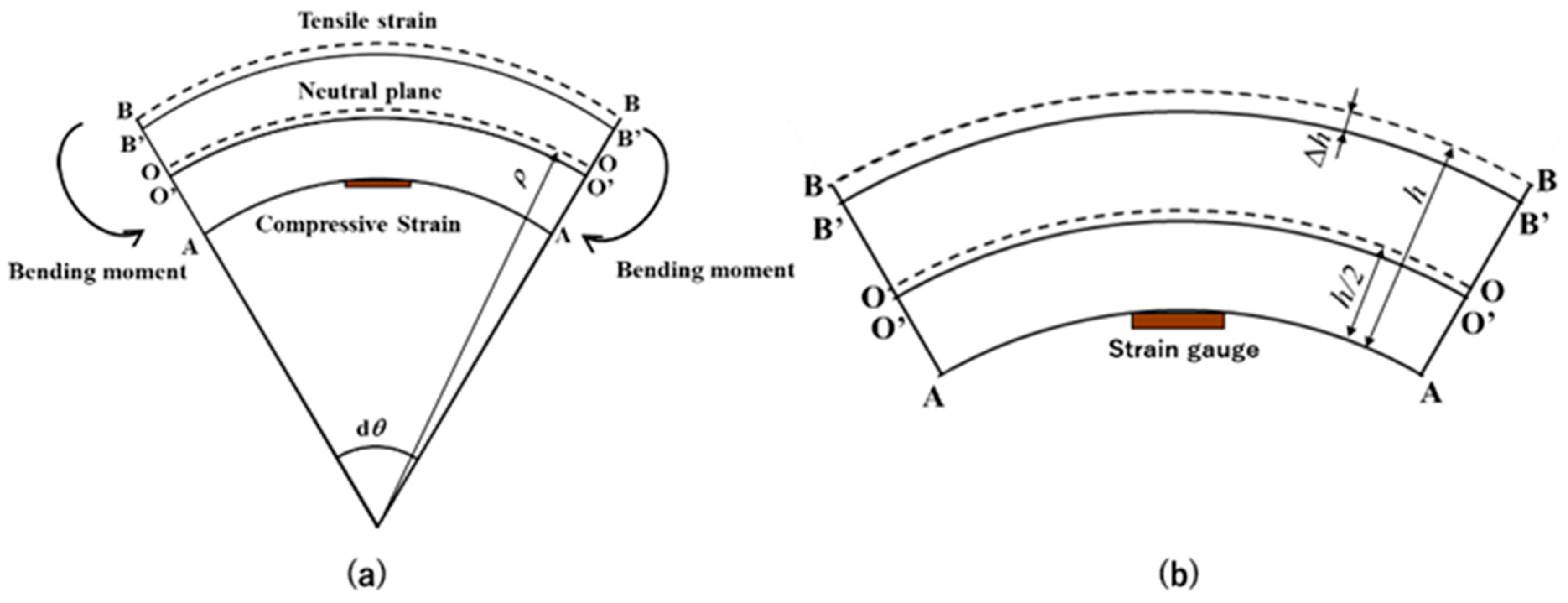
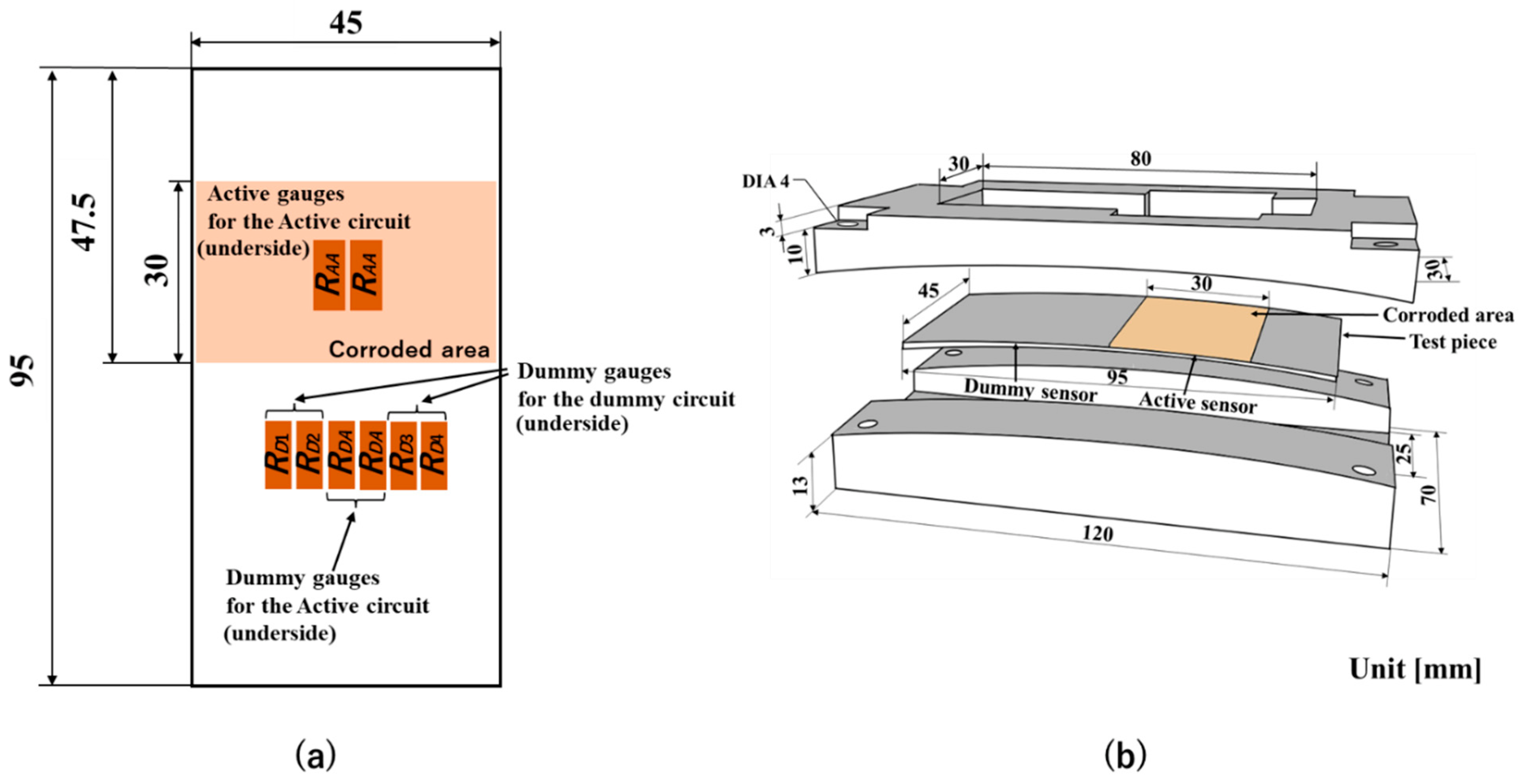
2.1. ACM Sensor Based on Strain Measurements
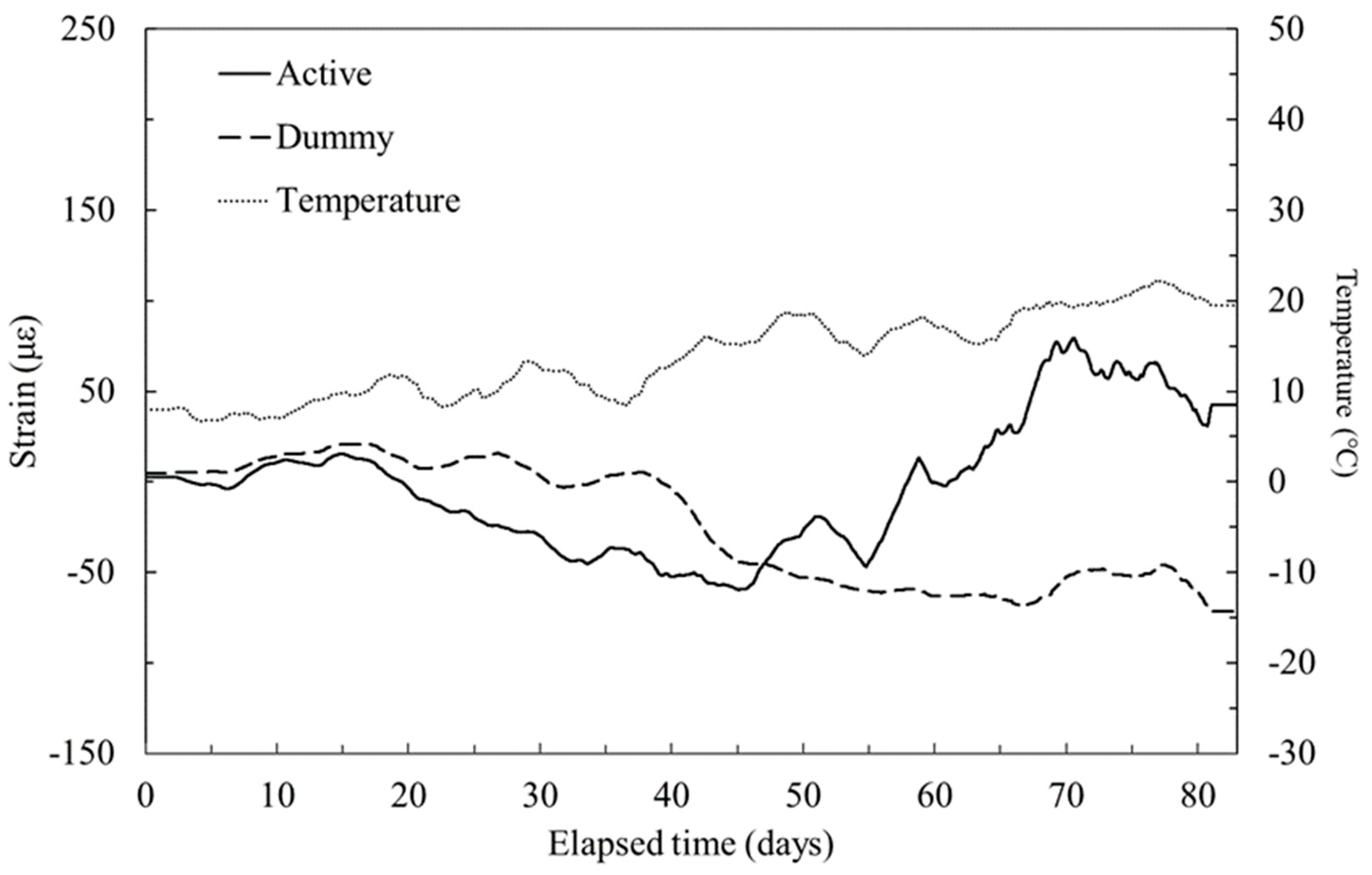
2.2. Data Collection with an ACM Sensor
3. Machine Learning Approach to Predicting Corrosion
3.1. Supervised Learning
3.2. Data Preprocessing
3.3. Model Validation
3.4. Evaluation Result
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Perveen, K.; Bridges, G.E.; Bhadra, S.; Thomson, D.J. Corrosion Potential Sensor for Remote Monitoring of Civil Structure Based on Printed Circuit Board Sensor. IEEE Trans. Instrum. Meas. 2014, 63, 2422–2431. [Google Scholar] [CrossRef]
- Almubaied, O.; Chai, H.K.; Islam, R.; Lim, K.-S.; Tan, C.G. Monitoring Corrosion Process of Reinforced Concrete Structure Using FBG Strain Sensor. IEEE Trans. Instrum. Meas. 2017, 66, 2148–2155. [Google Scholar] [CrossRef] [Green Version]
- Hassan, M.R.A.; Bakar, M.H.A.; Dambul, K.; Adikan, F.R.M. Optical-Based Sensors for Monitoring Corrosion of Reinforcement Rebar via an Etched Cladding Bragg Grating. Sensors 2012, 12, 15820–15826. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hu, W.; Ding, L.; Zhu, C.; Guo, D.; Yuan, Y.; Ma, N.; Chen, W. Optical Fiber Polarizer with Fe–C Film for Corrosion Monitoring. IEEE Sens. J. 2017, 17, 6904–6910. [Google Scholar] [CrossRef]
- Chen, W.; Dong, X. Modification of the wavelength-strain coefficient of FBG for the prediction of steel bar corrosion embedded in concrete. Opt. Fiber Technol. 2012, 18, 47–50. [Google Scholar] [CrossRef]
- Al Handawi, K.; Vahdati, N.; Rostron, P.; Lawand, L.; Shiryayev, O. Strain based FBG sensor for real-time corrosion rate monitoring in pre-stressed structures. Sens. Actuators B Chem. 2016, 236, 276–285. [Google Scholar] [CrossRef]
- Shitanda, I.; Okumura, A.; Itagaki, M.; Watanabe, K.; Asano, Y. Screen-printed atmospheric corrosion monitoring sensor based on electrochemical impedance spectroscopy. Sens. Actuators B Chem. 2009, 139, 292–297. [Google Scholar] [CrossRef]
- Xia, D.; Song, S.; Jin, W.; Li, J.; Gao, Z.; Wang, J.; Hu, W. Atmospheric corrosion monitoring of field-exposed Q235B and T91 steels in Zhoushan offshore environment using electrochemical probes. J. Wuhan Univ. Technol. Sci. Ed. 2017, 32, 1433–1440. [Google Scholar] [CrossRef]
- Nishikata, A.; Suzuki, F.; Tsuru, T. Corrosion monitoring of nickel-containing steels in marine atmospheric environment. Corros. Sci. 2005, 47, 2578–2588. [Google Scholar] [CrossRef]
- Xia, D.H.; Song, S.; Qin, Z.; Hu, W.; Behnamian, Y. Electrochemical probes and sensors designed for time-dependent atmospheric corrosion monitoring: Fun-damentals, progress, and challenges. J. Electrochem. Soc. 2019, 167, 037513. [Google Scholar] [CrossRef]
- Shinohara, T.; Motoda, S.; Oshikawa, W. Evaluation of corrosivity in atmospheric environment by ACM (Atmospheric Corrosion Monitor) type corrosion sensor. In Proceedings of the Pricm 5: The Fifth Pacific Rim International Conference on Advanced Materials and Processing, Pts 1–5, Beijing, China, 2–5 November 2004; Volume 475–479, pp. 61–64. [Google Scholar]
- Mizuno, D.; Suzuki, S.; Fujita, S.; Hara, N. Corrosion monitoring and materials selection for automotive environments by using Atmospheric Corrosion Monitor (ACM) sensor. Corros. Sci. 2014, 83, 217–225. [Google Scholar] [CrossRef]
- Kasai, N.; Hiroki, M.; Yamada, T.; Kihira, H.; Matsuoka, K.; Kuriyama, Y.; Okazaki, S. Atmospheric corrosion sensor based on strain measurement. Meas. Sci. Technol. 2016, 28, 015106. [Google Scholar] [CrossRef]
- Purwasih, N.; Kasai, N.; Okazaki, S.; Kihira, H. Development of Amplifier Circuit by Active-Dummy Method for Atmospheric Corrosion Monitoring in Steel Based on Strain Measurement. Metals 2018, 8, 5. [Google Scholar] [CrossRef] [Green Version]
- Purwasih, N.; Kasai, N.; Okazaki, S.; Kihira, H.; Kuriyama, Y. Atmospheric Corrosion Sensor Based on Strain Measurement with an Active Dummy Circuit Method in Experiment with Corrosion Products. Metals 2019, 9, 579. [Google Scholar] [CrossRef] [Green Version]
- Purwasih, N.; Shinozaki, H.; Okazaki, S.; Kihira, H.; Kuriyama, Y.; Kasai, N. Atmospheric Corrosion Sensor Based on Strain Measurement with Active–Dummy Fiber Bragg Grating Sensors. Metals 2020, 10, 1076. [Google Scholar] [CrossRef]
- Aghaaminiha, M.; Mehrani, R.; Colahan, M.; Brown, B.; Singer, M.; Nesic, S.; Vargas, S.M.; Sharma, S. Machine learning modeling of time-dependent corrosion rates of carbon steel in presence of corrosion inhibitors. Corros. Sci. 2021, 193, 109904. [Google Scholar] [CrossRef]
- Pei, Z.; Zhang, D.; Zhi, Y.; Yang, T.; Jin, L.; Fu, D.; Cheng, X.; Terryn, H.A.; Mol, J.M.; Li, X. Towards understanding and prediction of atmospheric corrosion of an Fe/Cu corrosion sensor via machine learning. Corros. Sci. 2020, 170, 108697. [Google Scholar] [CrossRef]
- Demsar, J.; Curk, T.; Erjavec, A.; Gorup, C.; Hocevar, T.; Milutinovic, M.; Mozina, M.; Polajnar, M.; Toplak, M.; Staric, A.; et al. Orange: Data Mining Toolbox in Python. J. Mach. Learn. Res. 2013, 14, 2349–2353. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Value | Number of Data Points |
|---|---|---|
| Strain before spraying | 0 | 2161 |
| Final strain | 100 | 1 |
| Total number | 2162 |
| Data Source | Root Mean Square Error |
|---|---|
| Neural network prediction | 0.5 |
| Support vector machine prediction | 0.0 |
| Monitoring data | 1.4 |
| Data Source | Root Mean Square Error |
|---|---|
| Neural network prediction | 8.8 |
| Support vector machine prediction | 15.7 |
| Monitoring data | 31.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Okura, T.; Kasai, N.; Minowa, H.; Okazaki, S. Application of Machine Learning for Data with an Atmospheric Corrosion Monitoring Sensor Based on Strain Measurements. Metals 2022, 12, 1179. https://doi.org/10.3390/met12071179
Okura T, Kasai N, Minowa H, Okazaki S. Application of Machine Learning for Data with an Atmospheric Corrosion Monitoring Sensor Based on Strain Measurements. Metals. 2022; 12(7):1179. https://doi.org/10.3390/met12071179
Chicago/Turabian StyleOkura, Taisei, Naoya Kasai, Hirotsugu Minowa, and Shinji Okazaki. 2022. "Application of Machine Learning for Data with an Atmospheric Corrosion Monitoring Sensor Based on Strain Measurements" Metals 12, no. 7: 1179. https://doi.org/10.3390/met12071179
APA StyleOkura, T., Kasai, N., Minowa, H., & Okazaki, S. (2022). Application of Machine Learning for Data with an Atmospheric Corrosion Monitoring Sensor Based on Strain Measurements. Metals, 12(7), 1179. https://doi.org/10.3390/met12071179