
A Constitutive Model for Asymmetric Cyclic Hysteresis of Wrought Magnesium Alloys under Variable Amplitude Loading



Abstract
:1. Introduction
2. Plasticity Modeling
2.1. Model Formulation
2.1.1. Yield Function and Flow Rule
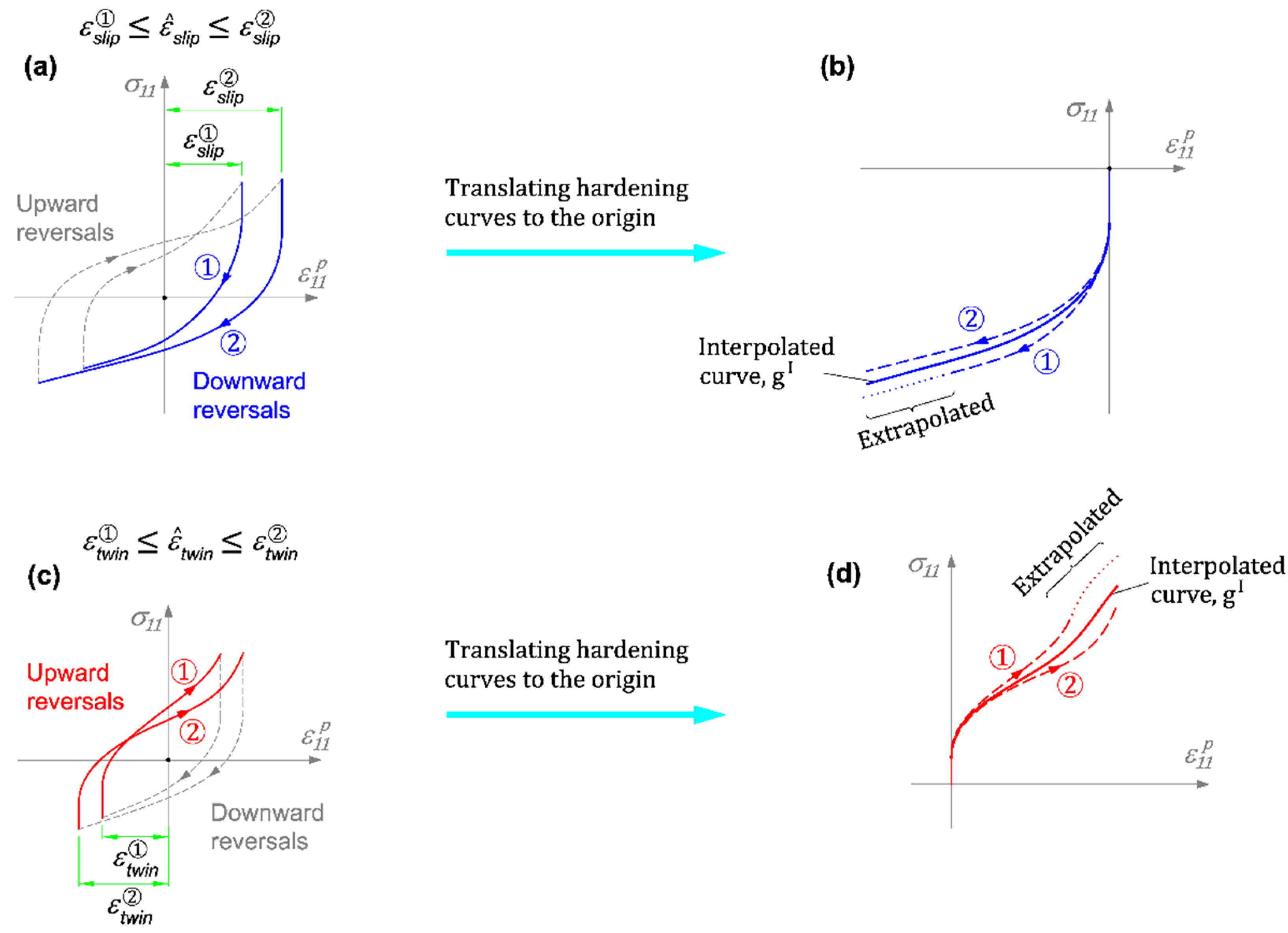
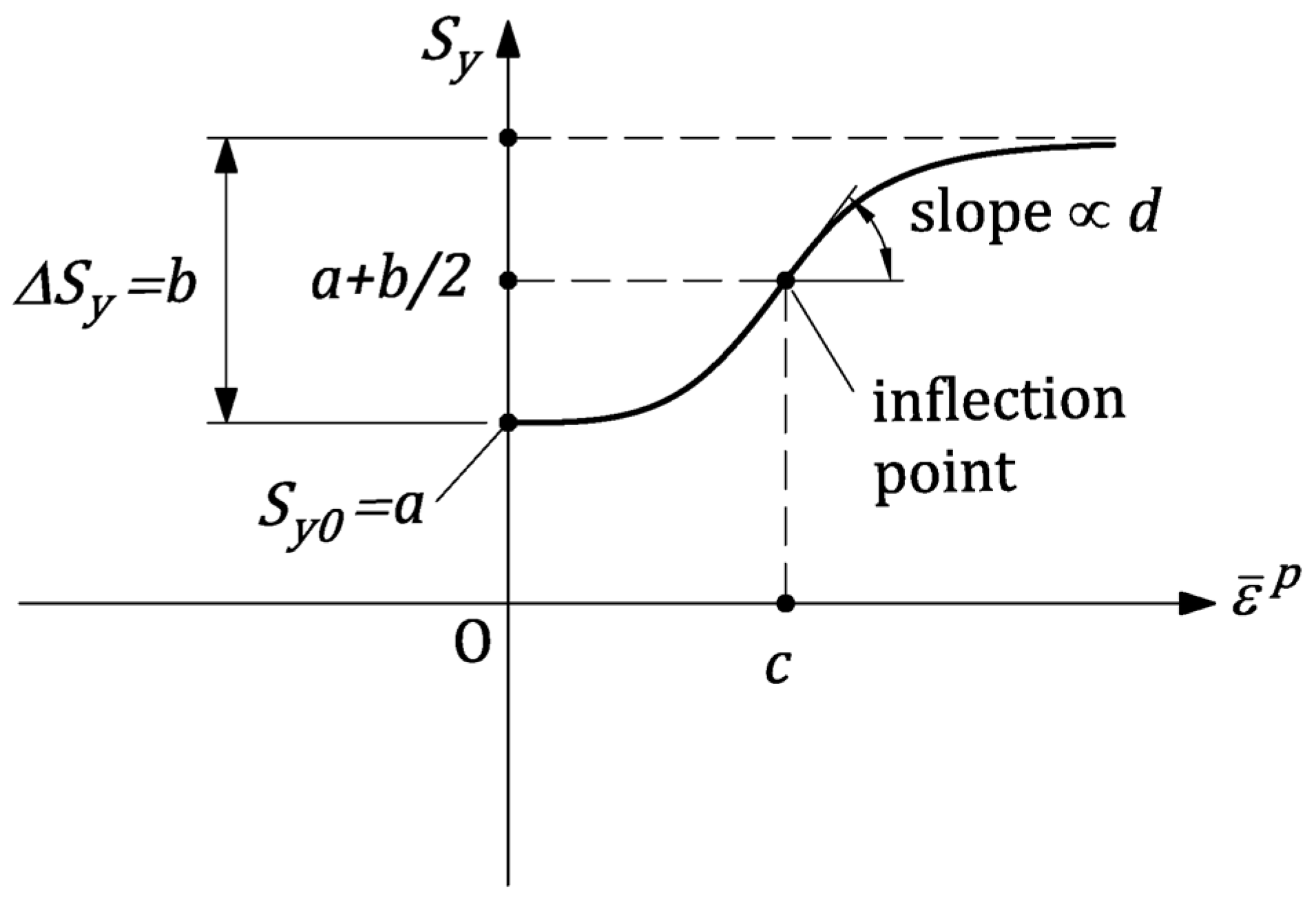
2.1.2. Flow Curves
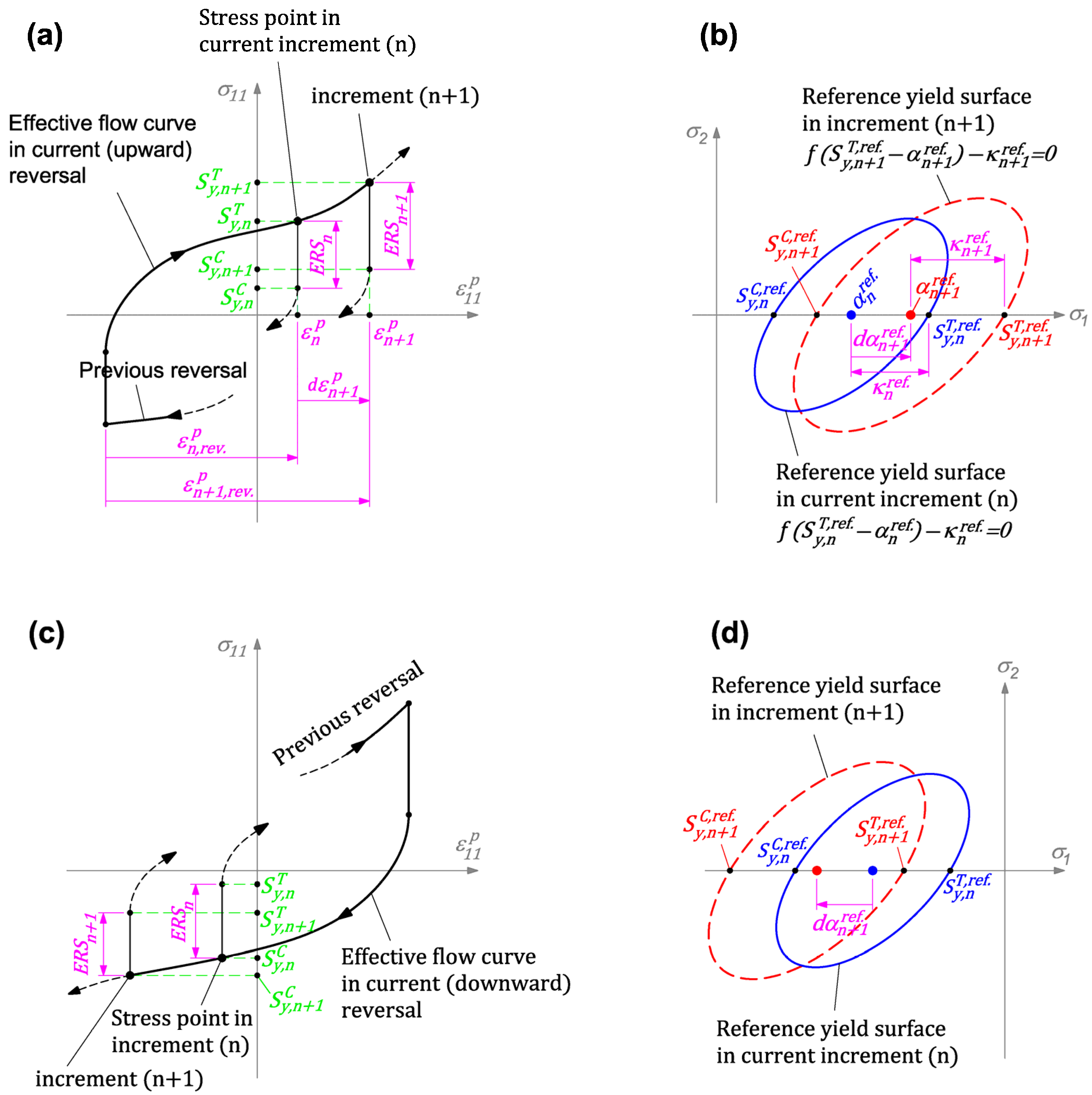
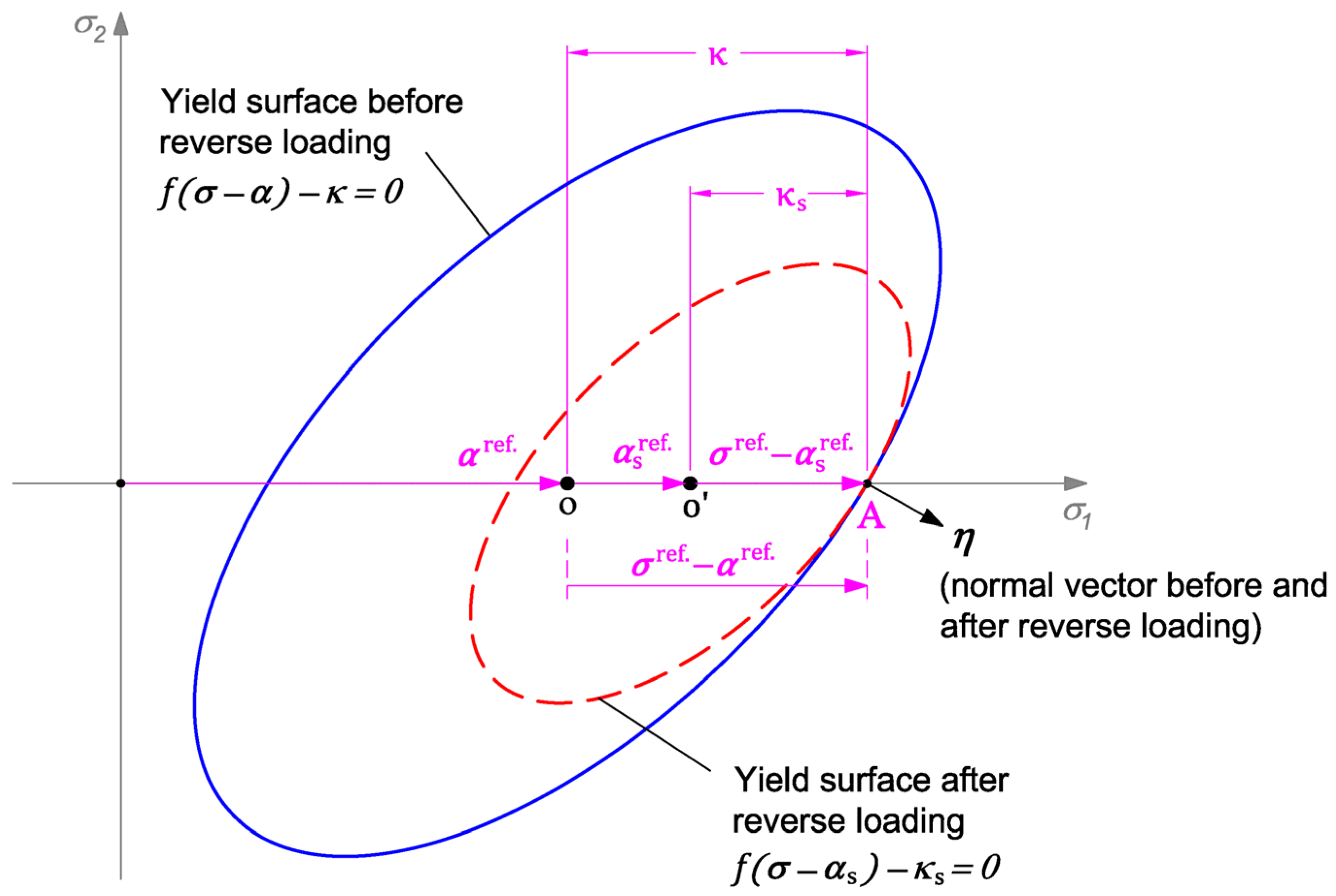
2.1.3. Hardening Rule
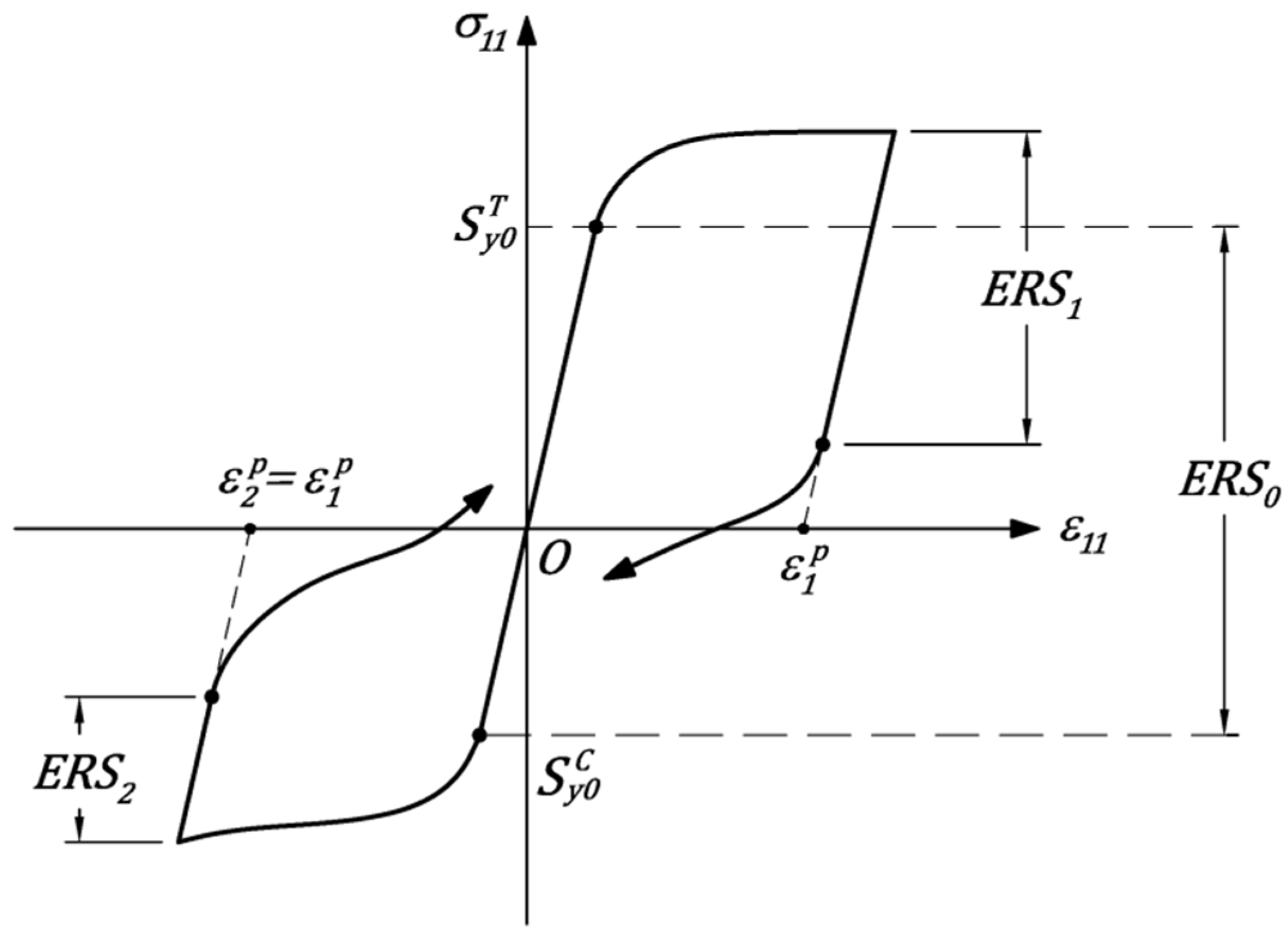
2.1.4. Modeling Cyclic Characteristics
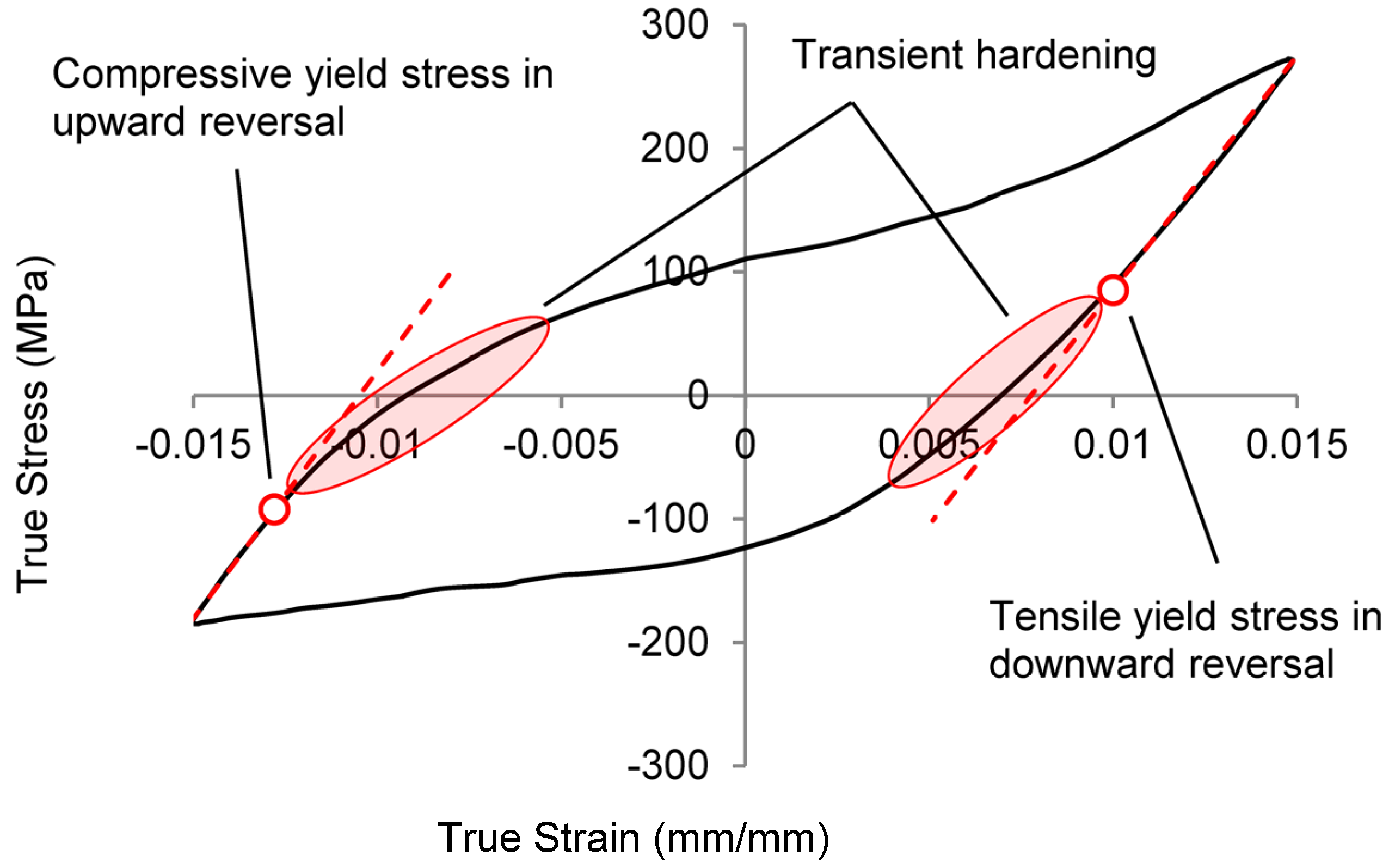
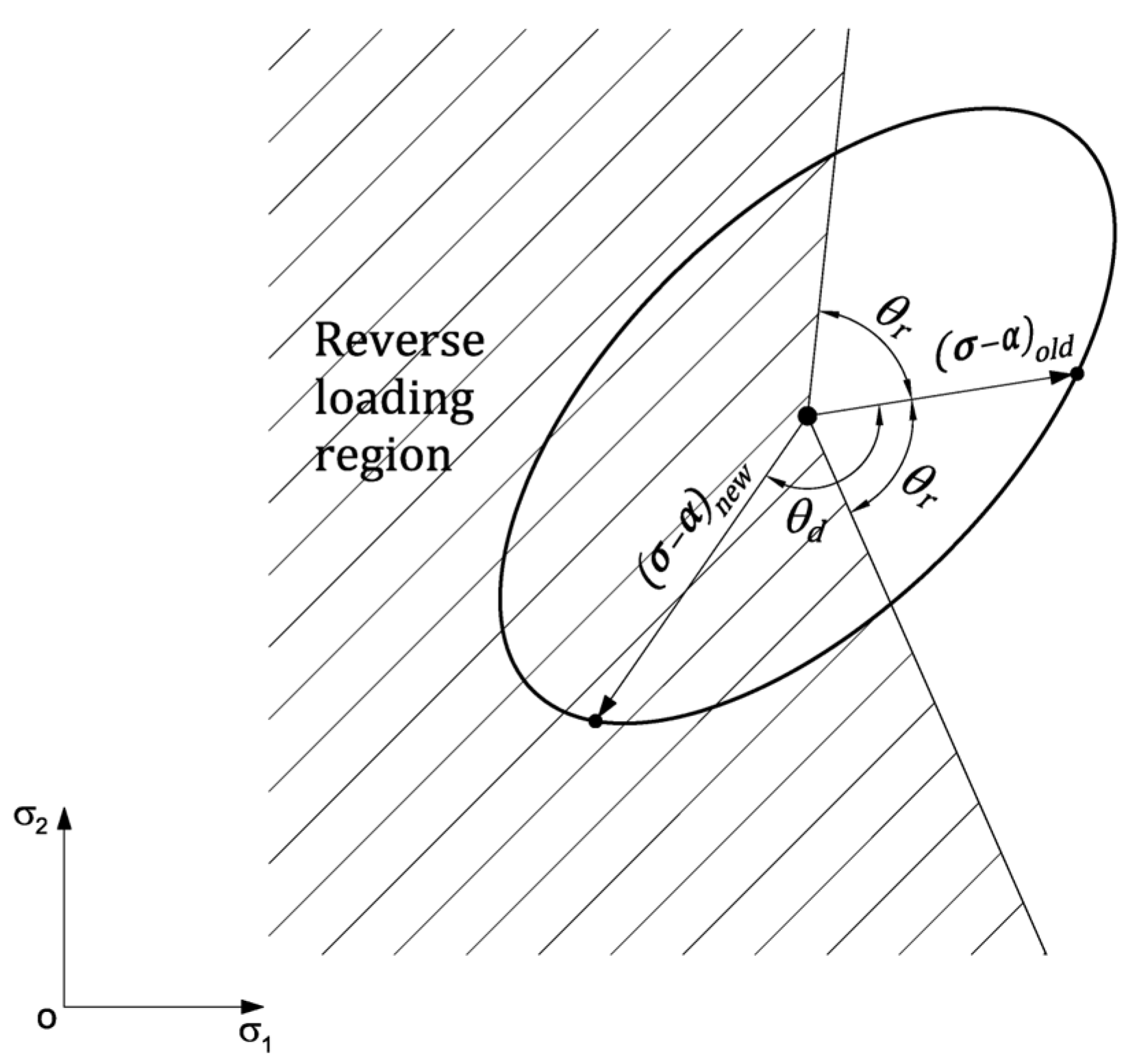
- Reversed loading and asymmetric hardening
- B.
- Stabilized stress–strain response
- Following the standard practice of cycle counting in VAL, rearrange the VAL block such that the second and the third reversals constitute the envelope cycle of the loading block.
- Use the cyclic tension/compression curve as the flow curve for the first reversal.
- For the second and the third reversals, i.e., the envelope cycle, the flow curve is determined according to the strain range for this cycle (through linear regression between the input constant amplitude stabilized hysteresis loops).
- The flow curves for the subsequent upward and downward reversals are obtained according to the residual twin and accumulated slip, respectively.
- If the current reversal closes the most recent open reversal and continues, the flow curve for the next recent open reversal in the same direction as the current reversal is followed.
2.2. Numerical Implementation
3. Numerical Examples and Model Calibration
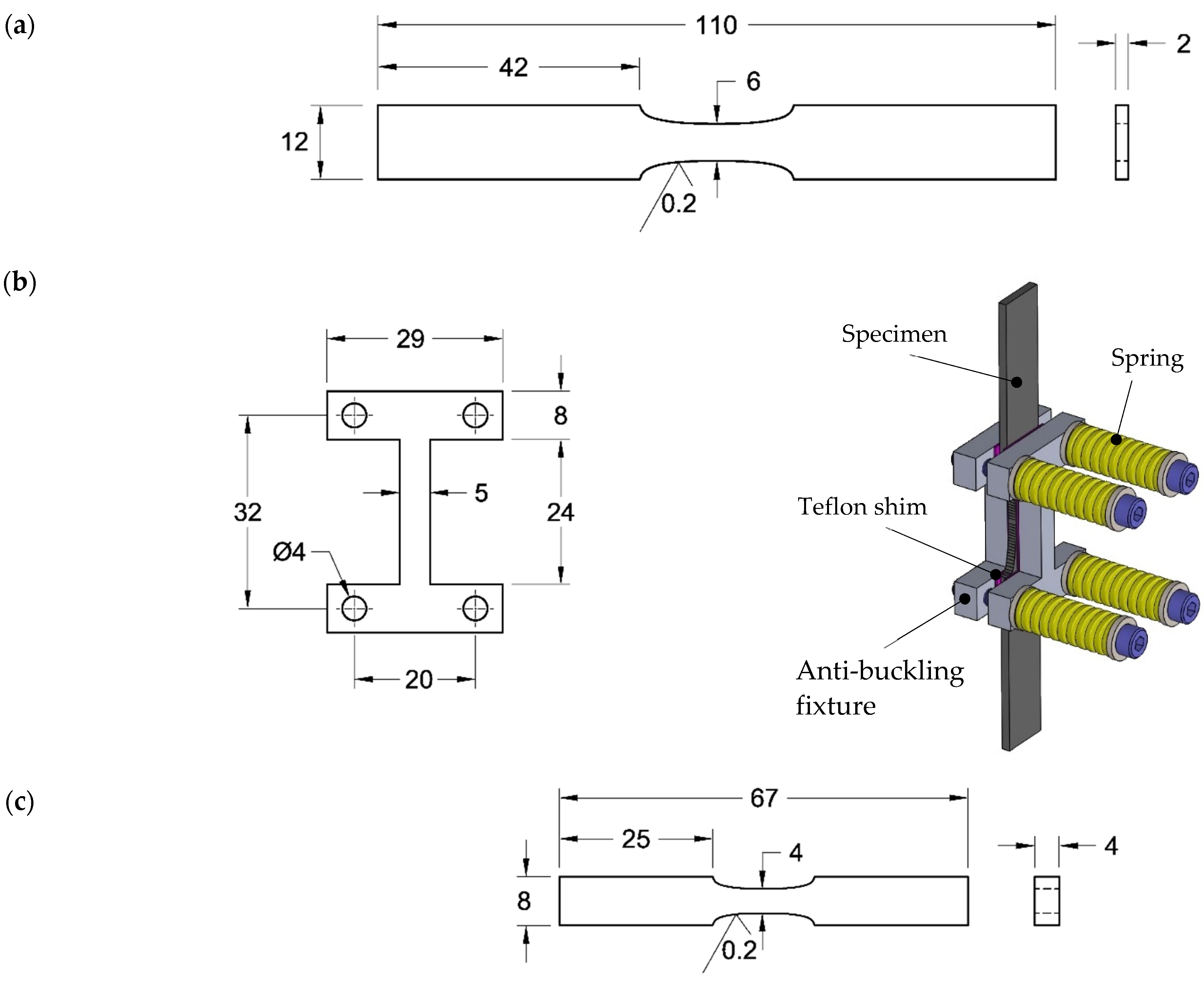
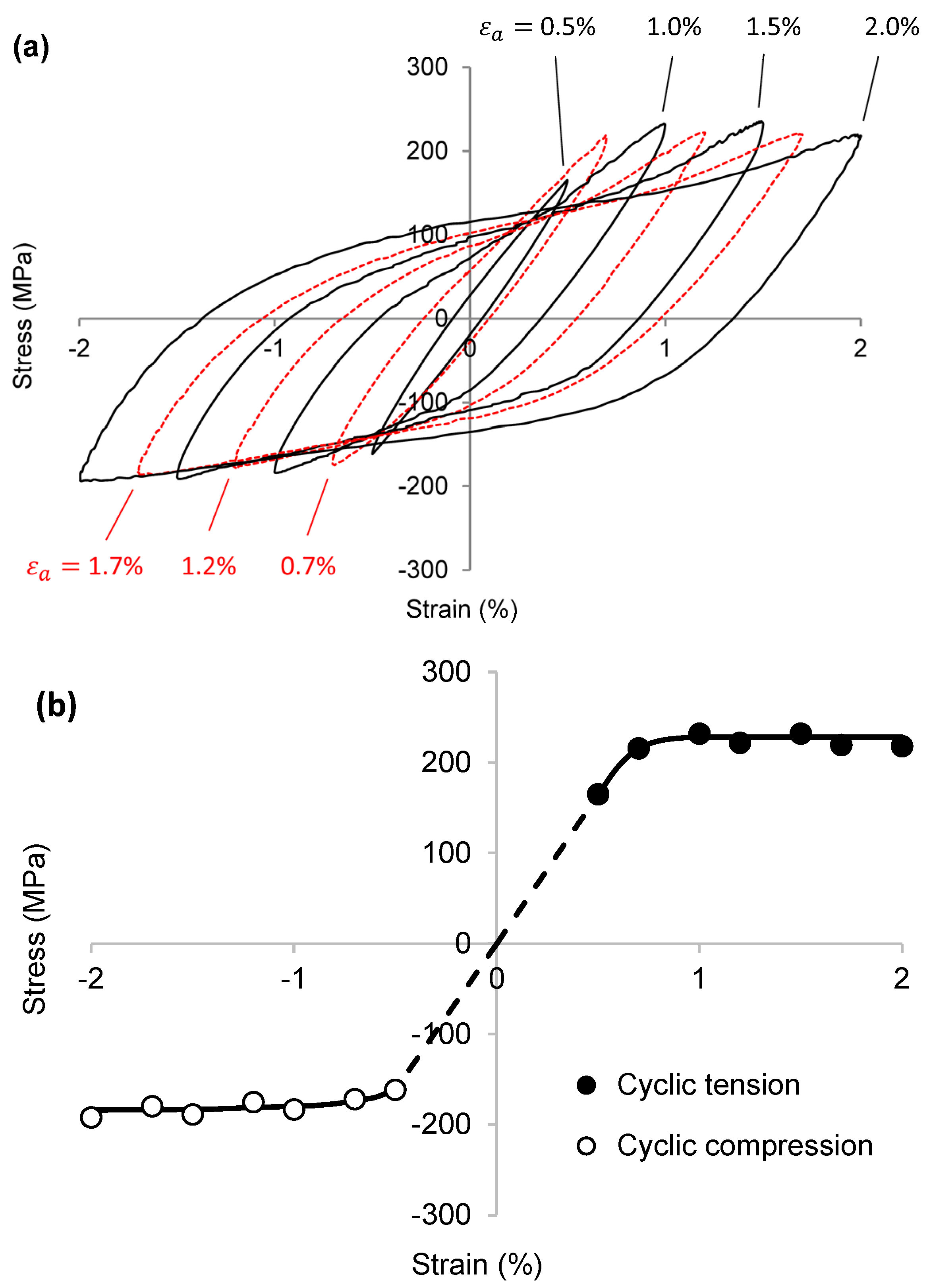
3.1. Materials and Experiments
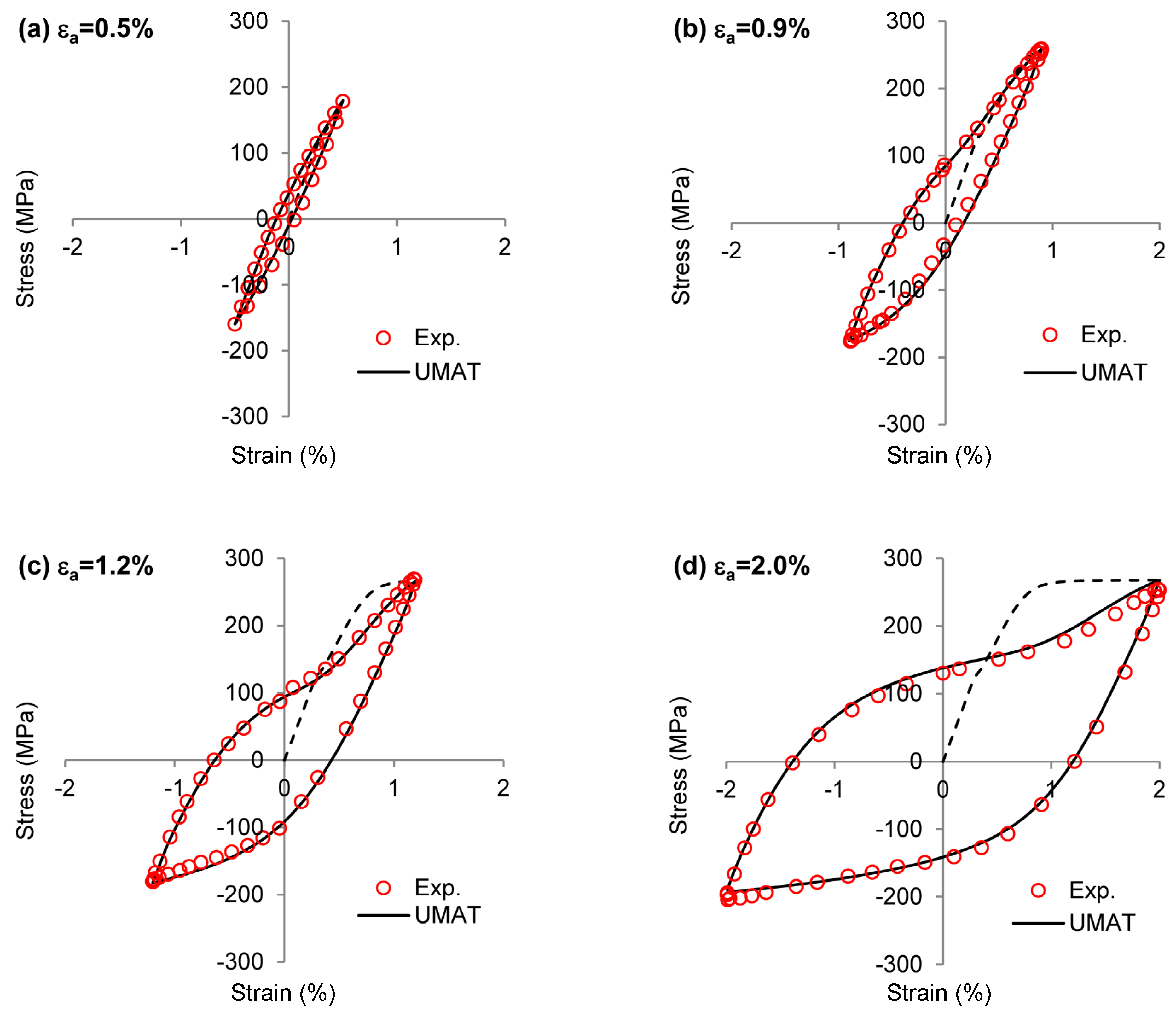
3.2. Application to Rolled ZEK100
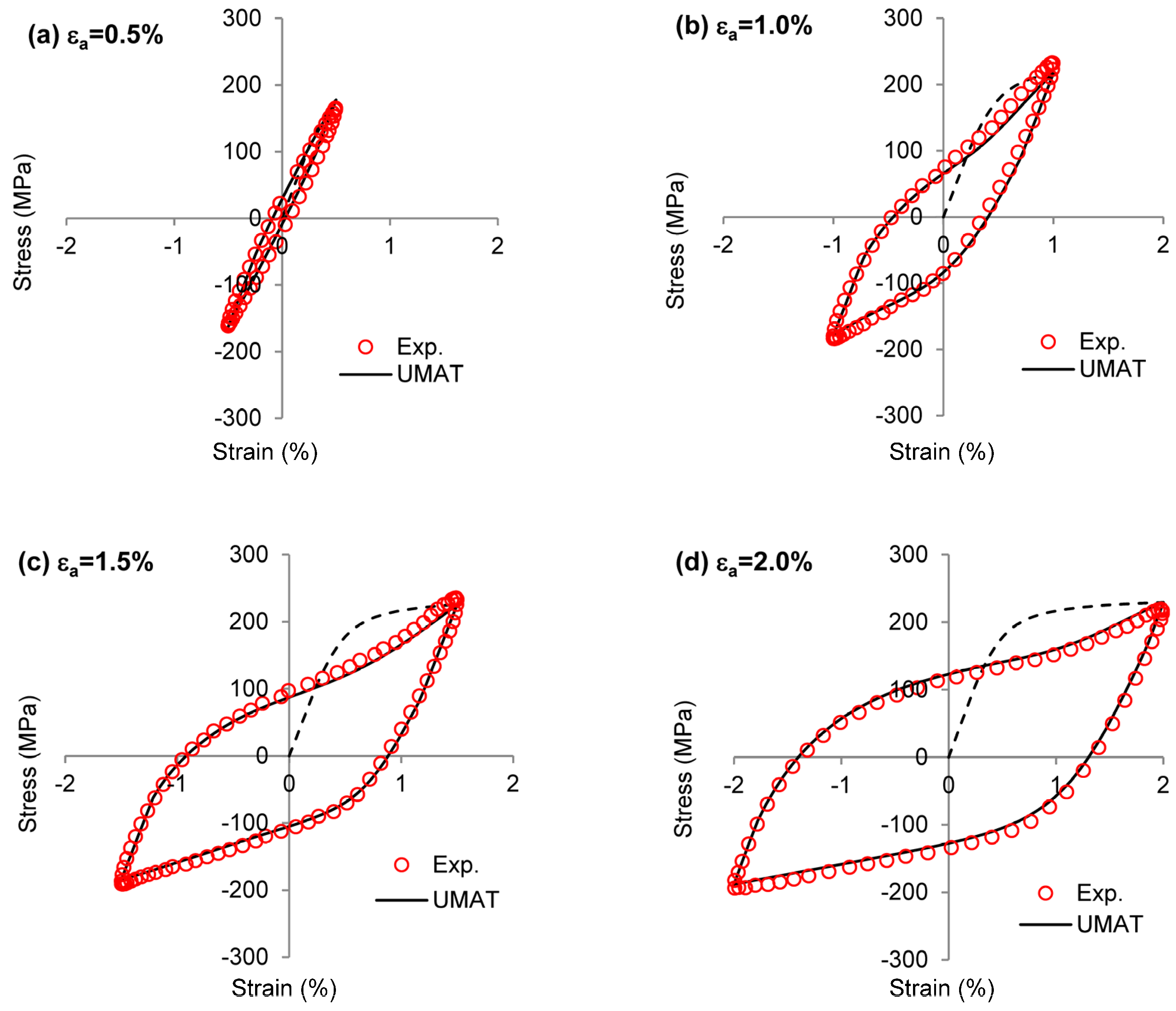
3.3. Application to Rolled AZ31B
4. Model Verification
4.1. Constant Amplitude Loading
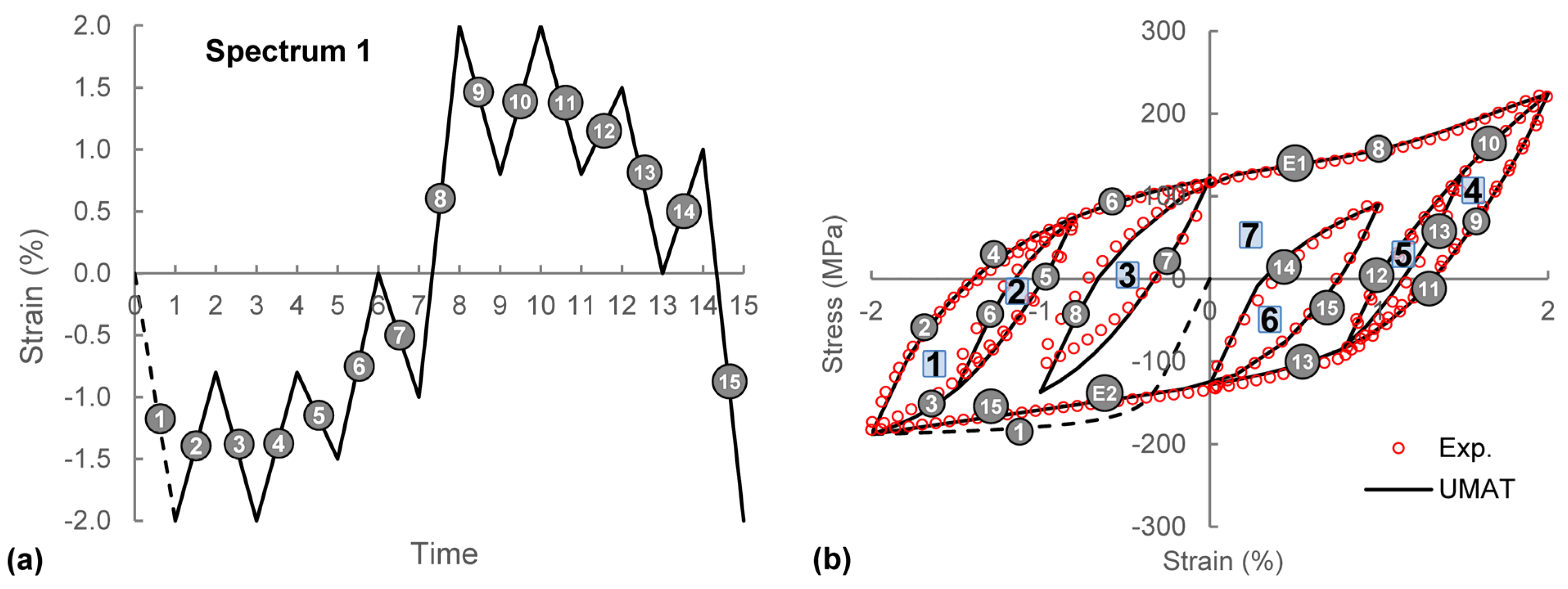
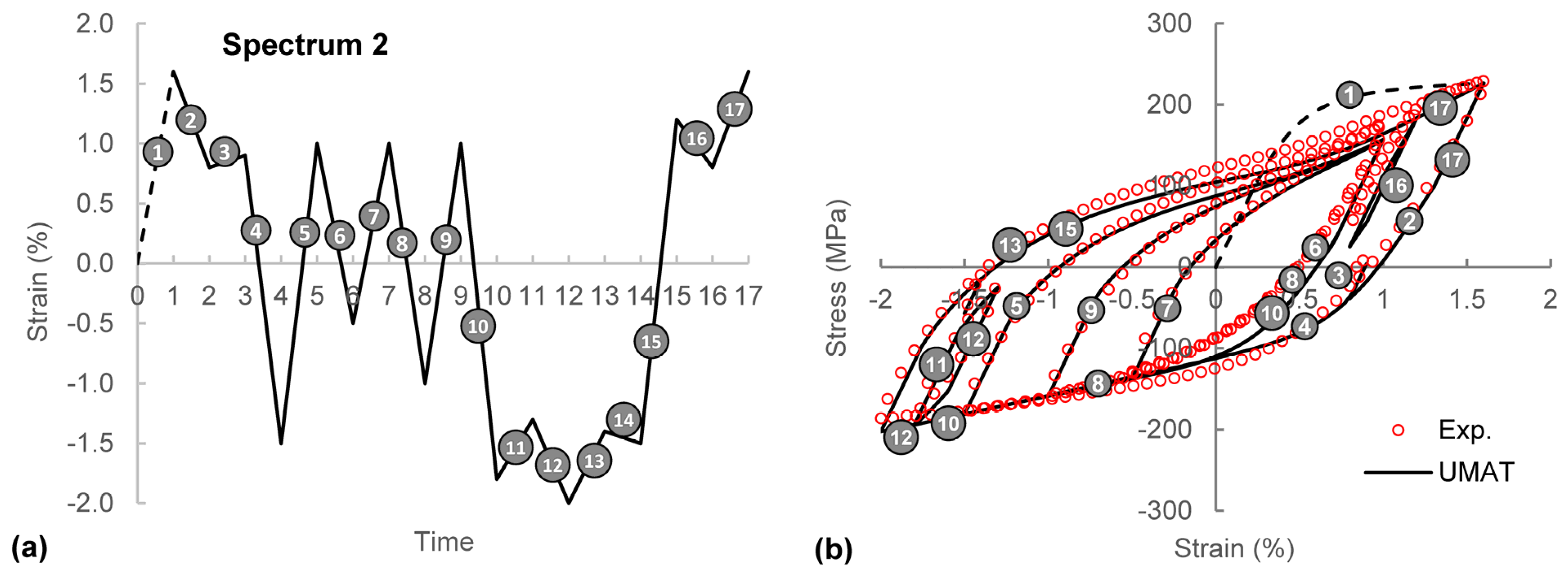
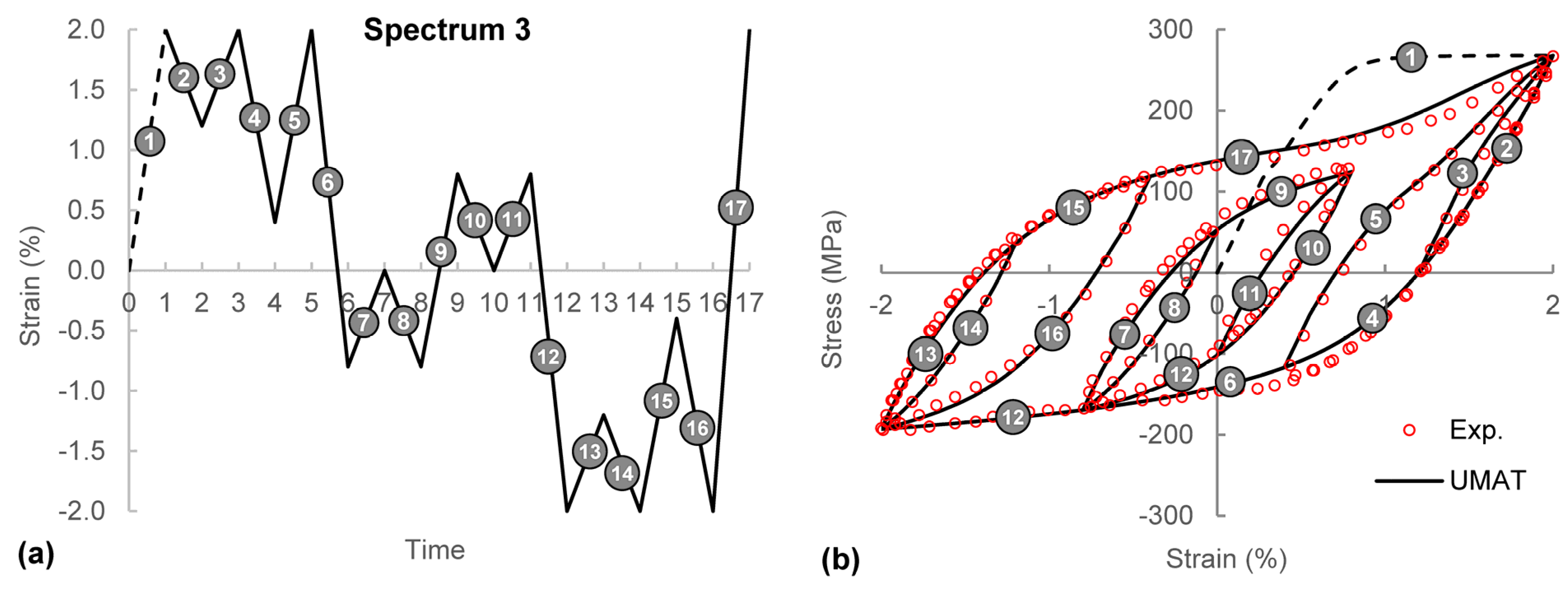
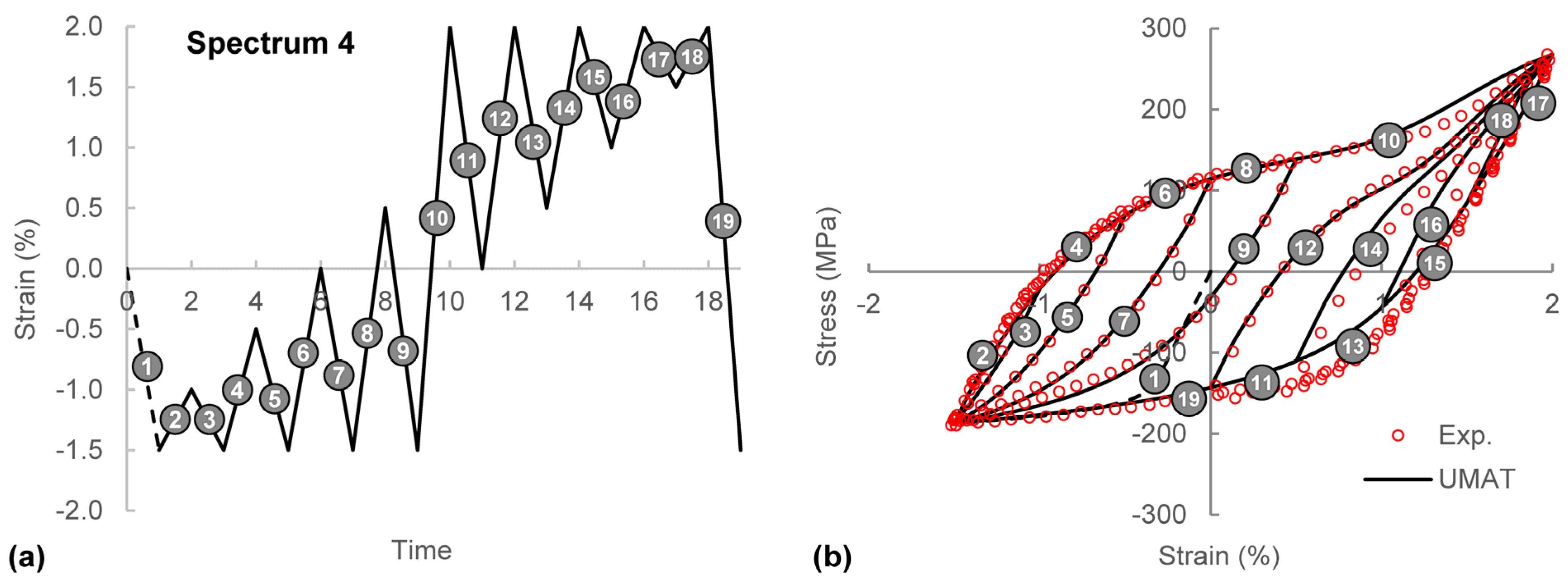
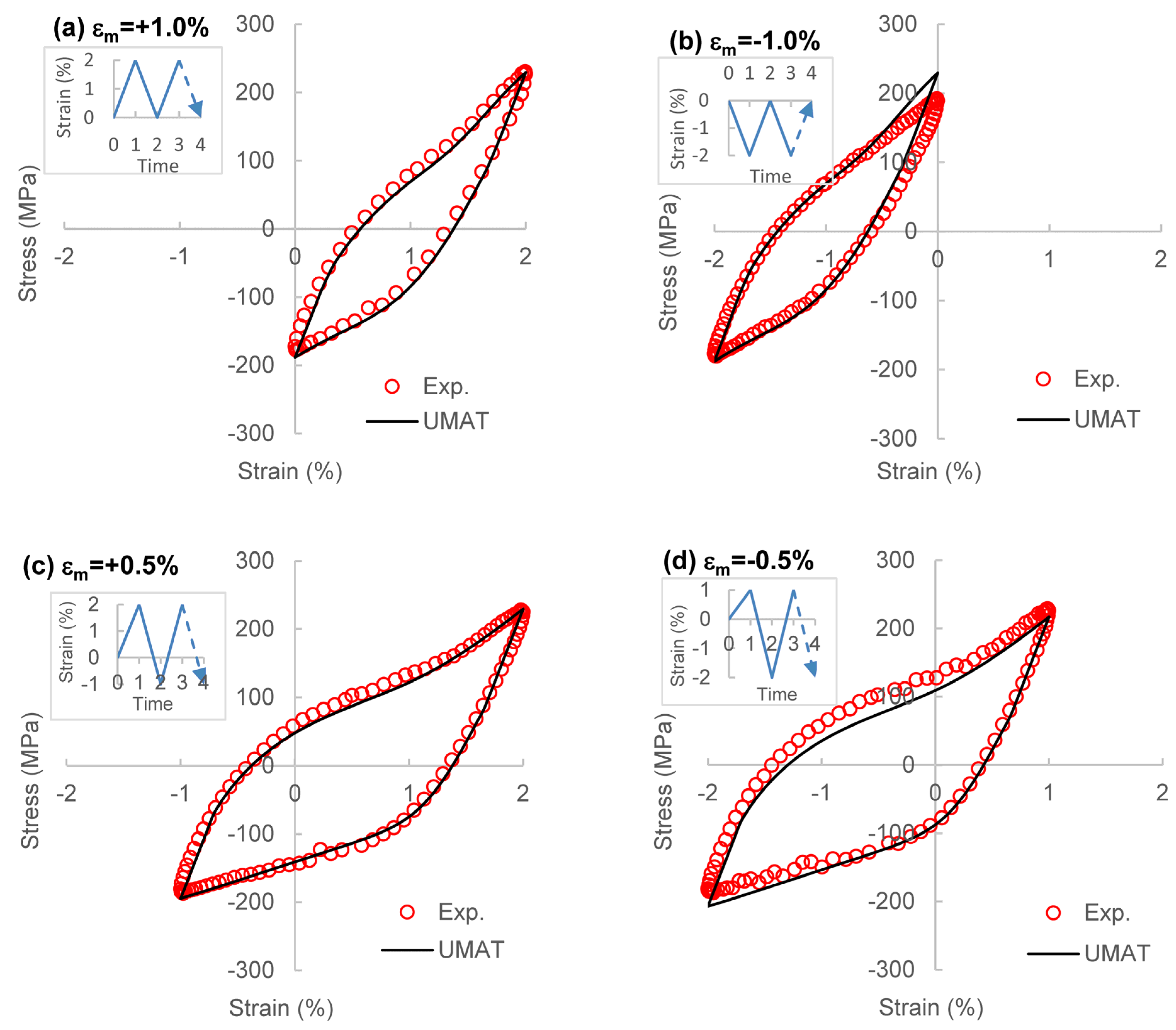
4.2. Variable Amplitude Loading
5. Conclusions
- A cyclic plasticity constitutive model was developed by adopting the symmetric von Mises yield criterion. The asymmetric initial yield strengths were described by virtually sub-sizing the yield surface. A novel combined isotropic–kinematic hardening rule was proposed for uniaxial loading.
- A procedure was introduced to generate the effective cyclic flow curves for an arbitrary cycle using a few fully-reversed hysteresis responses and the concepts of residual twin and accumulated slip deformations.
- According to the nature of the stabilized cyclic response of materials, the rules required to explain the stabilized hardening behavior were identified and incorporated into the plasticity model.
- The proposed constitutive model was calibrated for ZEK100 and AZ31B sheets. It was demonstrated that the UMAT was successful in reproducing the cyclic stress–strain behavior of the materials. The asymmetric initial yield strength, asymmetric hardening behavior, the Bauschinger effect, and reverse loading were well explained by the model.
- Within the scope of the verifications performed in this research, it was shown that the constitutive model was able to successfully describe the asymmetric cyclic hardening behavior of AZ31B and ZEK100 under constant amplitude loading with positive or negative mean strains. Moreover, the capability of the proposed model to predict the stabilized cyclic behavior of the materials under variable amplitude loading was verified.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rodney, D.; Ventelon, L.; Clouet, E.; Pizzagalli, L.; Willaime, F. Ab Initio Modeling of Dislocation Core Properties in Metals and Semiconductors. Acta Mater. 2017, 124, 633–659. [Google Scholar] [CrossRef]
- Staroselsky, A.; Anand, L. A Constitutive Model for Hcp Materials Deforming by Slip and Twinning: Application to Magnesium Alloy AZ31B. Int. J. Plast. 2003, 19, 1843–1864. [Google Scholar] [CrossRef]
- Abdolvand, H.; Majkut, M.; Oddershede, J.; Schmidt, S.; Lienert, U.; Diak, B.J.; Withers, P.J.; Daymond, M.R. On the Deformation Twinning of Mg AZ31B: A Three-Dimensional Synchrotron X-Ray Diffraction Experiment and Crystal Plasticity Finite Element Model. Int. J. Plast. 2015, 70, 77–97. [Google Scholar] [CrossRef]
- Castelluccio, G.M.; McDowell, D.L. Mesoscale Cyclic Crystal Plasticity with Dislocation Substructures. Int. J. Plast. 2017, 98, 1–26. [Google Scholar] [CrossRef]
- Bong, H.J.; Lee, J.; Lee, M.-G. Modeling Crystal Plasticity with an Enhanced Twinning–Detwinning Model to Simulate Cyclic Behavior of AZ31B Magnesium Alloy at Various Temperatures. Int. J. Plast. 2022, 150, 103190. [Google Scholar] [CrossRef]
- Jahed, H.; Roostaei, A. Cyclic Plasticity of Metals: Modeling Fundamentals and Applications; Jahed, H., Roostaei, A., Eds.; Elsevier: Amsterdam, The Netherlands, 2022; ISBN 9780128192931. [Google Scholar]
- Prager, W. A New Method of Analyzing Stresses and Strains in Work-Hardening Plastic Solids. J. Appl. Mech. 1956, 23, 493–496. [Google Scholar] [CrossRef]
- Mroz, Z. On the Description of Anisotropic Workhardening. J. Mech. Phys. Solids 1967, 15, 163–175. [Google Scholar] [CrossRef]
- Lee, J.Y.; Lee, M.G.; Barlat, F.; Bae, G. Piecewise Linear Approximation of Nonlinear Unloading-Reloading Behaviors Using a Multi-Surface Approach. Int. J. Plast. 2017, 93, 112–136. [Google Scholar] [CrossRef]
- Khutia, N.; Dey, P.P.; Sivaprasad, S.; Tarafder, S. Development of New Cyclic Plasticity Model for 304LN Stainless Steel through Simulation and Experimental Investigation. Mech. Mater. 2014, 78, 85–101. [Google Scholar] [CrossRef]
- Krieg, R.D. A Practical Two Surface Plasticity Theory. J. Appl. Mech. 1975, 42, 641. [Google Scholar] [CrossRef]
- Dafalias, Y.F.; Popov, E.P. Plastic Internal Variables Formalism of Cyclic Plasticity. J. Appl. Mech. 1976, 43, 645. [Google Scholar] [CrossRef]
- Lee, M.G.G.; Kim, D.; Kim, C.; Wenner, M.L.L.; Wagoner, R.H.H.; Chung, K. A Practical Two-Surface Plasticity Model and Its Application to Spring-Back Prediction. Int. J. Plast. 2007, 23, 1189–1212. [Google Scholar] [CrossRef]
- Yoshida, F.; Uemori, T. A Model of Large-Strain Cyclic Plasticity Describing the Bauschinger Effect and Workhardening Stagnation. Int. J. Plast. 2002, 18, 661–686. [Google Scholar] [CrossRef]
- Kondori, B.; Madi, Y.; Besson, J.; Benzerga, A.A. Evolution of the 3D Plastic Anisotropy of HCP Metals: Experiments and Modeling. Int. J. Plast. 2018, 117, 71–92. [Google Scholar] [CrossRef]
- Dafalias, Y.F. On Cyclic and Anisotropic Plasticity: (I) A General Model Including Material Behavior Under Stress Reversals. (II) Anisotropic Hardening for Initially Orthotropic Materials; University of California: Berkeley, CA, USA, 1975. [Google Scholar]
- Chaboche, J.L. Time-Independent Constitutive Theories for Cyclic Plasticity. Int. J. Plast. 1986, 2, 149–188. [Google Scholar] [CrossRef]
- Dafalias, Y.F. Bounding Surface Plasticity. I: Mathematical Foundation and Hypoplasticity. J. Eng. Mech. 1986, 112, 966–987. [Google Scholar] [CrossRef]
- Frederick, C.O.; Armstrong, P.J. A Mathematical Representation of the Multiaxial Bauschinger Effect; Berkeley Nuclear Laboratories: Berkeley, CA, USA, 1966; Volume 731. [Google Scholar]
- Ohno, N.; Wang, J.-D. Nonlinear Kinematic Hardening Rule with Critical State for Activation of Dynamic Recovery. In Anisotropy and Localization of Plastic Deformation; Springer: Dordrecht, The Netherlands, 1991; pp. 455–458. [Google Scholar]
- Jiang, Y.; Sehitoglu, H. Modeling of Cyclic Ratchetting Plasticity, Part I: Development of Constitutive Relations. J. Appl. Mech. 1996, 63, 720–725. [Google Scholar] [CrossRef]
- Abdel-Karim, M.; Ohno, N. Kinematic Hardening Model Suitable for Ratchetting with Steady-State. Int. J. Plast. 2000, 16, 225–240. [Google Scholar] [CrossRef]
- Kang, G.; Kan, Q. Cyclic Plasticity of Engineering Materials: Experiments and Models; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Hazeli, K.; Askari, H.; Cuadra, J.; Streller, F.; Carpick, R.W.; Zbib, H.M.; Kontsos, A. Microstructure-Sensitive Investigation of Magnesium Alloy Fatigue. Int. J. Plast. 2015, 68, 55–76. [Google Scholar] [CrossRef]
- Ghorbanpour, S.; McWilliams, B.A.; Knezevic, M. Low-Cycle Fatigue Behavior of Rolled WE43-T5 Magnesium Alloy. Fatigue. Fract. Eng. Mater. Struct. 2019, 42, 1357–1372. [Google Scholar] [CrossRef]
- Roostaei, A.A.; Jahed, H. Role of Loading Direction on Cyclic Behaviour Characteristics of AM30 Extrusion and Its Fatigue Damage Modelling. Mater. Sci. Eng. A 2016, 670, 26–40. [Google Scholar] [CrossRef]
- Barlat, F.; Gracio, J.J.; Lee, M.-G.G.; Rauch, E.F.; Vincze, G. An Alternative to Kinematic Hardening in Classical Plasticity. Int. J. Plast. 2011, 27, 1309–1327. [Google Scholar] [CrossRef]
- Kim, J.H.; Kim, D.; Lee, Y.-S.; Lee, M.-G.; Chung, K.; Kim, H.-Y.; Wagoner, R.H. A Temperature-Dependent Elasto-Plastic Constitutive Model for Magnesium Alloy AZ31 Sheets. Int. J. Plast. 2013, 50, 66–93. [Google Scholar] [CrossRef]
- Hill, R. A Theory of the Yielding and Plastic Flow of Anisotropic Metals. Proc. R Soc. Lond. A Math. Phys. Sci. 1948, 193, 281–297. [Google Scholar]
- Cazacu, O.; Plunkett, B.; Barlat, F. Orthotropic Yield Criterion for Hexagonal Closed Packed Metals. Int. J. Plast. 2006, 22, 1171–1194. [Google Scholar] [CrossRef]
- Nguyen, N.-T.; Lee, M.-G.; Kim, J.H.; Kim, H.Y. A Practical Constitutive Model for AZ31B Mg Alloy Sheets with Unusual Stress–Strain Response. Finite Elem. Anal. Des. 2013, 76, 39–49. [Google Scholar] [CrossRef]
- Muhammad, W.; Mohammadi, M.; Kang, J.; Mishra, R.K.; Inal, K. An Elasto-Plastic Constitutive Model for Evolving Asymmetric/Anisotropic Hardening Behavior of AZ31B and ZEK100 Magnesium Alloy Sheets Considering Monotonic and Reverse Loading Paths. Int. J. Plast. 2015, 70, 30–59. [Google Scholar] [CrossRef]
- Li, M. Constitutive Modeling of Slip, Twinning, and Untwinning in AZ31B Magnesium; The Ohio State University: Columbus, OH, USA, 2006. [Google Scholar]
- Li, M.; Lou, X.Y.; Kim, J.H.; Wagoner, R.H. An Efficient Constitutive Model for Room-Temperature, Low-Rate Plasticity of Annealed Mg AZ31B Sheet. Int. J. Plast. 2010, 26, 820–858. [Google Scholar] [CrossRef]
- Lee, M.G.; Wagoner, R.H.; Lee, J.K.; Chung, K.; Kim, H.Y. Constitutive Modeling for Anisotropic/Asymmetric Hardening Behavior of Magnesium Alloy Sheets. Int. J. Plast. 2008, 24, 545–582. [Google Scholar] [CrossRef]
- Lee, M.G.; Kim, S.J.; Wagoner, R.H.; Chung, K.; Kim, H.Y. Constitutive Modeling for Anisotropic/Asymmetric Hardening Behavior of Magnesium Alloy Sheets: Application to Sheet Springback. Int. J. Plast. 2009, 25, 70–104. [Google Scholar] [CrossRef]
- Drucker, D.C.; Prager, W. Soil Mechanics and Plastic Analysis or Limit Design. Q Appl. Math. 1952, 10, 157–165. [Google Scholar] [CrossRef]
- He, Z.; Chen, W.; Wang, F.; Feng, M. A Kinematic Hardening Constitutive Model for the Uniaxial Cyclic Stress–Strain Response of Magnesium Sheet Alloys at Room Temperature. Mater. Res. Express. 2017, 4, 116513. [Google Scholar] [CrossRef]
- Noban, M.; Albinmousa, J.; Jahed, H.; Lambert, S. A Continuum-Based Cyclic Plasticity Model for AZ31B Magnesium Alloy under Proportional Loading. Procedia. Eng. 2011, 10, 1366–1371. [Google Scholar] [CrossRef]
- Roostaei, A.A.; Jahed, H. A Cyclic Small-Strain Plasticity Model for Wrought Mg Alloys under Multiaxial Loading: Numerical Implementation and Validation. Int. J. Mech. Sci. 2018, 145, 318–329. [Google Scholar] [CrossRef]
- Anes, V.; Moreira, R.; Reis, L.; Freitas, M. Simulation of the Cyclic Stress–Strain Behavior of the Magnesium Alloy AZ31B-F under Multiaxial Loading. Crystals 2023, 13, 969. [Google Scholar] [CrossRef]
- Kang, G.; Li, H. Review on Cyclic Plasticity of Magnesium Alloys: Experiments and Constitutive Models. Int. J. Miner. Metall. Mater. 2021, 28, 567–589. [Google Scholar] [CrossRef]
- Casey, J.; JahedMotlagh, H. The Strength-Differential Effect in Plasticity. Int. J. Solids Struct. 1984, 20, 377–393. [Google Scholar] [CrossRef]
- Stephens, R.I.; Fatemi, A.; Stephens, R.R.; Fuchs, H.O. Metal Fatigue in Engineering; John Wiley & Sons: New York, NY, USA, 2001; p. 496. [Google Scholar]
- Wu, L.; Jain, A.; Brown, D.W.W.; Stoica, G.M.M.; Agnew, S.R.R.; Clausen, B.; Fielden, D.E.E.; Liaw, P.K.K. Twinning–Detwinning Behavior during the Strain-Controlled Low-Cycle Fatigue Testing of a Wrought Magnesium Alloy, ZK60A. Acta Mater. 2008, 56, 688–695. [Google Scholar] [CrossRef]
- Shi, R.; Zheng, J.; Li, T.; Shou, H.; Yin, D.; Rao, J. Quantitative Analysis of the Deformation Modes and Cracking Modes during Low-Cycle Fatigue of a Rolled AZ31B Magnesium Alloy: The Influence of Texture. Mater. Sci. Eng. A 2022, 844, 143103. [Google Scholar] [CrossRef]
- Lei, Y.; Li, H.; Liu, Y.; Wang, Z.; Kang, G. Experimental Study on Uniaxial Ratchetting-Fatigue Interaction of Extruded AZ31 Magnesium Alloy with Different Plastic Deformation Mechanisms. J. Magnes. Alloys 2023, 11, 379–391. [Google Scholar] [CrossRef]
- Ziegler, H. A Modification of Prager’s Hardening Rule. Quarternery Appl. Math. 1959, 17, 55–65. [Google Scholar] [CrossRef]
- Lv, F.; Yang, F.; Duan, Q.Q.Q.; Yang, Y.S.S.; Wu, S.D.D.; Li, S.X.X.; Zhang, Z.F.F. Fatigue Properties of Rolled Magnesium Alloy (AZ31) Sheet: Influence of Specimen Orientation. Int. J. Fatigue. 2011, 33, 672–682. [Google Scholar] [CrossRef]
- Lv, F.; Yang, F.; Duan, Q.Q.; Luo, T.J.; Yang, Y.S.; Li, S.X.; Zhang, Z.F. Tensile and Low-Cycle Fatigue Properties of Mg–2.8% Al–1.1% Zn–0.4% Mn Alloy along the Transverse and Rolling Directions. Scr. Mater. 2009, 61, 887–890. [Google Scholar] [CrossRef]
- Park, S.H.; Hong, S.G.; Bang, W.; Lee, C.S. Effect of Anisotropy on the Low-Cycle Fatigue Behavior of Rolled AZ31 Magnesium Alloy. Mater. Sci. Eng. A 2010, 527, 417–423. [Google Scholar] [CrossRef]
- Lin, Y.C.; Liu, Z.H.; Chen, X.M.; Long, Z.L. Cyclic Plasticity Constitutive Model for Uniaxial Ratcheting Behavior of AZ31B Magnesium Alloy. J. Mater. Eng. Perform. 2015, 24, 1820–1833. [Google Scholar] [CrossRef]
- Cazacu, O.; Barlat, F. A Criterion for Description of Anisotropy and Yield Differential Effects in Pressure-Insensitive Metals. Int. J. Plast. 2004, 20, 2027–2045. [Google Scholar] [CrossRef]
- Chen, L.; Zhang, J.; Zhang, H. Anisotropic Yield Criterion for Metals Exhibiting Tension–Compression Asymmetry. Adv. Appl. Math. Mech. 2021, 13, 701–723. [Google Scholar] [CrossRef]
- Yang, Q.; Jiang, B.; Song, B.; Yu, Z.; He, D.; Chai, Y.; Zhang, J.; Pan, F. The Effects of Orientation Control via Tension-Compression on Microstructural Evolution and Mechanical Behavior of AZ31 Mg Alloy Sheet. J. Magnes. Alloys 2022, 10, 411–422. [Google Scholar] [CrossRef]
- Mekonen, M.N.; Steglich, D.; Bohlen, J.; Letzig, D.; Mosler, J. Mechanical Characterization and Constitutive Modeling of Mg Alloy Sheets. Mater. Sci. Eng. A 2012, 540, 174–186. [Google Scholar] [CrossRef]
- Kim, J.; Ryou, H.; Kim, D.D.D.; Lee, W.; Hong, S.-H.H.; Chung, K.; Kim, D.D.D.; Lee, W.; Hong, S.-H.H.; Chung, K. Constitutive Law for AZ31B Mg Alloy Sheets and Finite Element Simulation for Three-Point Bending. Int. J. Mech. Sci. 2008, 50, 1510–1518. [Google Scholar] [CrossRef]
- Nixon, M.E.; Cazacu, O.; Lebensohn, R.A. Anisotropic Response of High-Purity α-Titanium: Experimental Characterization and Constitutive Modeling. Int. J. Plast. 2010, 26, 516–532. [Google Scholar] [CrossRef]
- Lee, J.-W.; Lee, M.-G.; Barlat, F. Finite Element Modeling Using Homogeneous Anisotropic Hardening and Application to Spring-Back Prediction. Int. J. Plast. 2012, 29, 13–41. [Google Scholar] [CrossRef]
- Hasegawa, S.; Tsuchida, Y.; Yano, H.; Matsui, M. Evaluation of Low Cycle Fatigue Life in AZ31 Magnesium Alloy. Int. J. Fatigue. 2007, 29, 1839–1845. [Google Scholar] [CrossRef]
- Li, Q.; Yu, Q.; Zhang, J.; Jiang, Y. Effect of Strain Amplitude on Tension-Compression Fatigue Behavior of Extruded Mg6Al1ZnA Magnesium Alloy. Scr. Mater. 2010, 62, 778–781. [Google Scholar] [CrossRef]
- Jordon, J.B.; Gibson, J.B.; Horstemeyer, M.F.; Kadiri, H.E.; Baird, J.C.; Luo, A.A. Effect of Twinning, Slip, and Inclusions on the Fatigue Anisotropy of Extrusion-Textured AZ61 Magnesium Alloy. Mater. Sci. Eng. A 2011, 528, 6860–6871. [Google Scholar] [CrossRef]
- Behravesh, S.B. Fatigue Characterization and Cyclic Plasticity Modeling of Magnesium Spot-Welds; University of Waterloo: Waterloo, ON, Canada, 2013. [Google Scholar]
- Jiang, Y.; Zhang, J. Benchmark Experiments and Characteristic Cyclic Plasticity Deformation. Int. J. Plast. 2008, 24, 1481–1515. [Google Scholar] [CrossRef]
- Yu, Q.; Zhang, J.; Jiang, Y.; Li, Q. An Experimental Study on Cyclic Deformation and Fatigue of Extruded ZK60 Magnesium Alloy. Int. J. Fatigue. 2012, 36, 47–58. [Google Scholar] [CrossRef]
- Yin, S.M.; Yang, H.J.; Li, S.X.; Wu, S.D.; Yang, F. Cyclic Deformation Behavior of As-Extruded Mg-3%Al-1%Zn. Scr. Mater. 2008, 58, 751–754. [Google Scholar] [CrossRef]
- Partridge, P.G. Cyclic Twinning in Fatigued Close-Packed Hexagonal Metals. Philos. Mag. 1965, 12, 1043–1054. [Google Scholar] [CrossRef]
- Lou, X.Y.; Li, M.; Boger, R.K.; Agnew, S.R.; Wagoner, R.H. Hardening Evolution of AZ31B Mg Sheet. Int. J. Plast. 2007, 23, 44–86. [Google Scholar] [CrossRef]
- Abaqus Analysis User’s Manual, Version 6.14-1; Dassault Systemes Simulia Inc.: Providence, RI, USA, 2014.
- Ling, Y.; Roostaei, A.A.; Glinka, G.; Jahed, H. Fatigue of ZEK100-F Magnesium Alloy: Characterisation and Modelling. Int. J. Fatigue. 2019, 125, 179–186. [Google Scholar] [CrossRef]
- Behravesh, S.B.; Jahed, H.; Lambert, S. Fatigue Characterization and Modeling of AZ31B Magnesium Alloy Spot-Welds. Int. J. Fatigue. 2014, 64, 1–13. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Alloy | Zn | Al | Mn | Zr | Nd | Mg |
|---|---|---|---|---|---|---|
| ZEK100 [70] | 1.37 | 0.003 | 0.005 | 0.48 | 0.19 | Bal. |
| AZ31B-H24 [71] | 0.915 | 2.73 | 0.375 | - | - | Bal. |
(MPa) | (MPa) | |||
| Cyclic tension | 100 | 140 | 0.0007 | 0.8 |
| Cyclic compression | 100 | 119 | 0.0010 | 0.4 |
| Upward Reversals | ||||||||
(MPa) | (MPa) | (MPa) | ||||||
| 0.5% | 0.0024 | 88 | 500 | 0.0042 | 1.1 | 221 | 0.0500 | 0.3 |
| 1.0% | 0.0103 | 113 | 500 | 0.0141 | 0.7 | 109 | 0.0087 | 7.2 |
| 1.5% | 0.0202 | 121 | 297 | 0.0068 | 0.8 | 274 | 0.0227 | 5.0 |
| 2.0% | 0.0305 | 86 | 339 | 0.0052 | 0.7 | 91 | 0.0282 | 9.4 |
| Downward reversals | ||||||||
(MPa) | (MPa) | (MPa) | ||||||
| 0.5% | 0.0009 | 73 | 500 | 0.0083 | 1.4 | 500 | 0.0052 | 0.7 |
| 1.0% | 0.0050 | 128 | 300 | 0.0017 | 1.1 | 300 | 0.0176 | 4.3 |
| 1.5% | 0.0098 | 144 | 206 | 0.0011 | 1.3 | 200 | 0.0244 | 2.2 |
| 2.0% | 0.0147 | 64 | 314 | 0.0015 | 1.1 | 200 | 0.0500 | 2.3 |
(MPa) | (MPa) | |||
| Cyclic tension | 127 | 141 | 0.0010 | 2.5 |
| Cyclic compression | 127 | 198 | 0.1000 | 0.4 |
| Upward Reversals | ||||||||
(MPa) | (MPa) | (MPa) | ||||||
| 0.5% | 0.0021 | 132 | 236 | 0.0010 | 1.0 | 122 | 0.0026 | 2.3 |
| 0.9% | 0.0078 | 53 | 295 | 0.0013 | 1.0 | 158 | 0.0058 | 5.1 |
| 1.2% | 0.0135 | 52 | 307 | 0.0020 | 0.9 | 152 | 0.0110 | 9.1 |
| 2.0% | 0.0295 | 30 | 379 | 0.0025 | 0.8 | 114 | 0.0256 | 10.0 |
| Downward reversals | ||||||||
(MPa) | (MPa) | (MPa) | ||||||
| 0.5% | 0.0008 | 47 | 272 | 0.0013 | 1.2 | 320 | 0.0500 | 0.5 |
| 0.9% | 0.0030 | 15 | 426 | 0.0020 | 1.1 | 300 | 0.0500 | 0.6 |
| 1.2% | 0.0058 | 44 | 318 | 0.0012 | 1.3 | 300 | 0.0500 | 0.6 |
| 2.0% | 0.0138 | 47 | 272 | 0.0013 | 1.2 | 320 | 0.0500 | 0.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Behravesh, S.B.; Lambert, S.; Jahed, H. A Constitutive Model for Asymmetric Cyclic Hysteresis of Wrought Magnesium Alloys under Variable Amplitude Loading. Metals 2024, 14, 221. https://doi.org/10.3390/met14020221
Behravesh SB, Lambert S, Jahed H. A Constitutive Model for Asymmetric Cyclic Hysteresis of Wrought Magnesium Alloys under Variable Amplitude Loading. Metals. 2024; 14(2):221. https://doi.org/10.3390/met14020221
Chicago/Turabian StyleBehravesh, Seyed Behzad, Stephan Lambert, and Hamid Jahed. 2024. "A Constitutive Model for Asymmetric Cyclic Hysteresis of Wrought Magnesium Alloys under Variable Amplitude Loading" Metals 14, no. 2: 221. https://doi.org/10.3390/met14020221