
Arc Quality Index Based on Three-Phase Cassie–Mayr Electric Arc Model of Electric Arc Furnace

Abstract
:1. Introduction
2. Materials and Methods
2.1. Electric Arc Furnace (EAF)
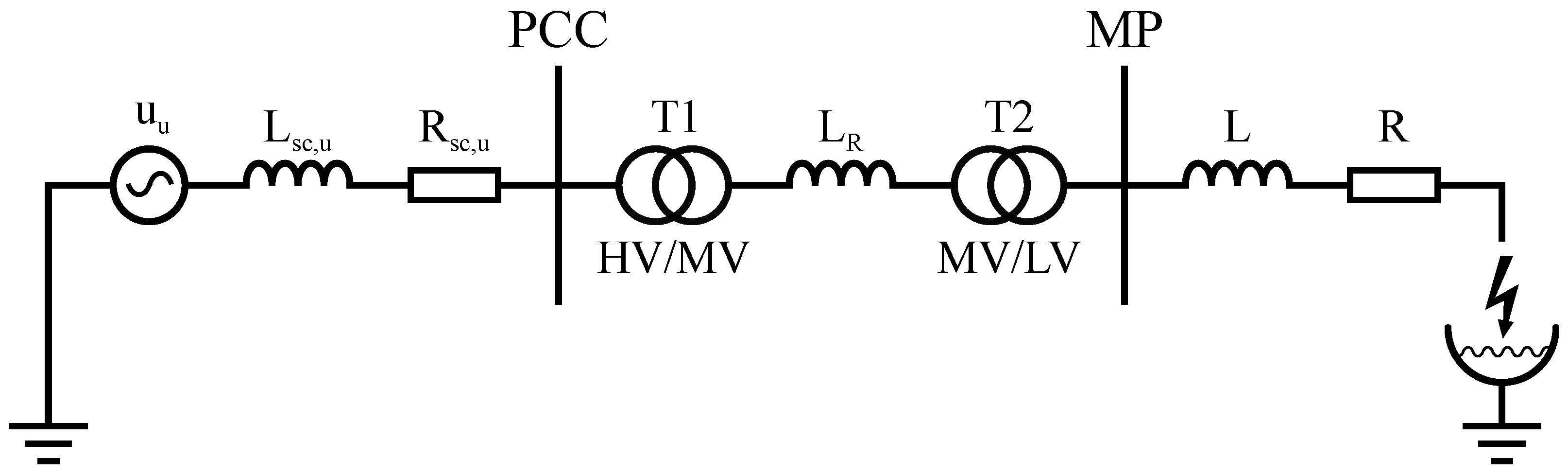
2.2. Three-Phase Equivalent Circuit
2.3. Cassie–Mayr Arc Model
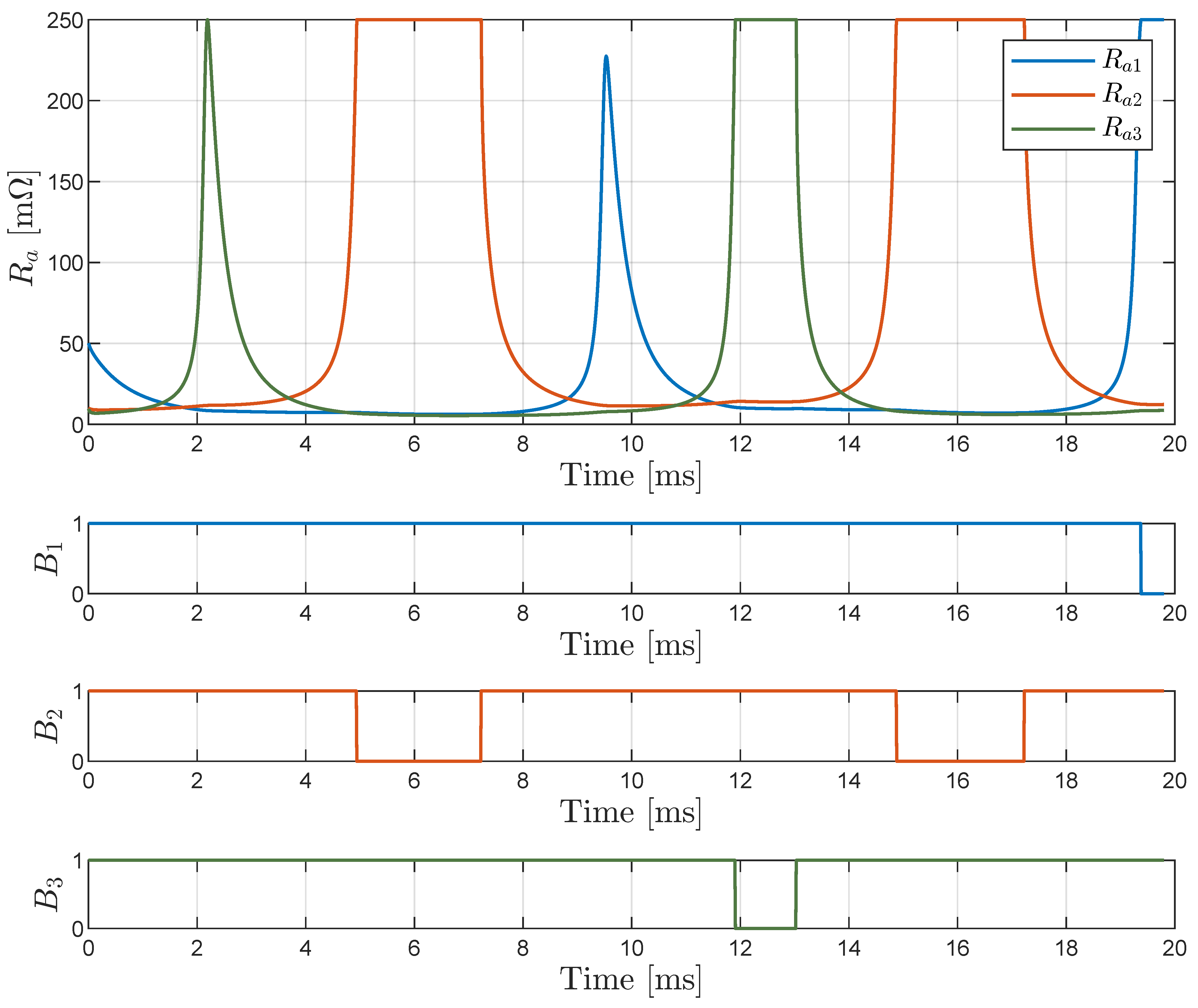
2.4. Arc Extinction and Ignition
3. Parameter Optimization
3.1. Initial Parameter Selection
3.2. Equivalent Circuit Parameter Selection
3.3. Hyperparameter Selection
3.4. Parameter Estimation Algorithm
| Algorithm 1: Three-phase Cassie–Mayr model optimization |
|
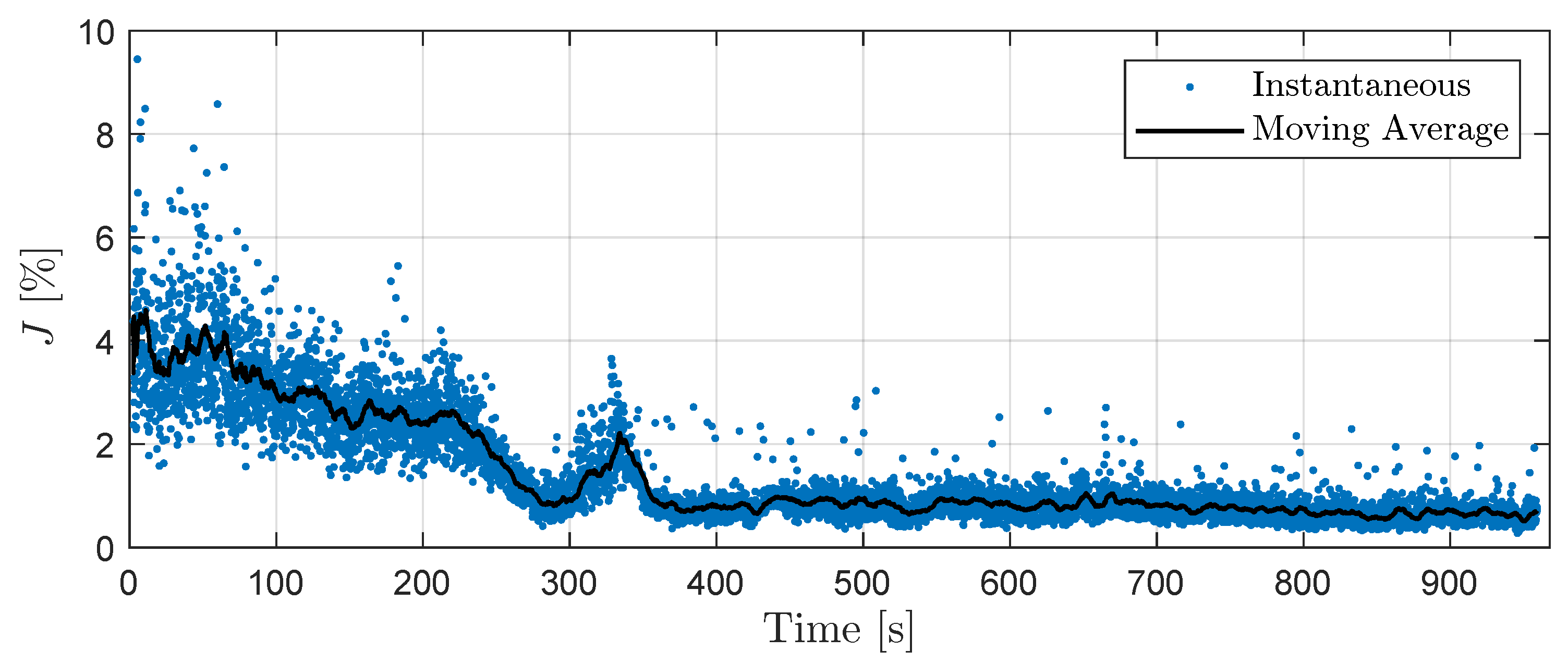
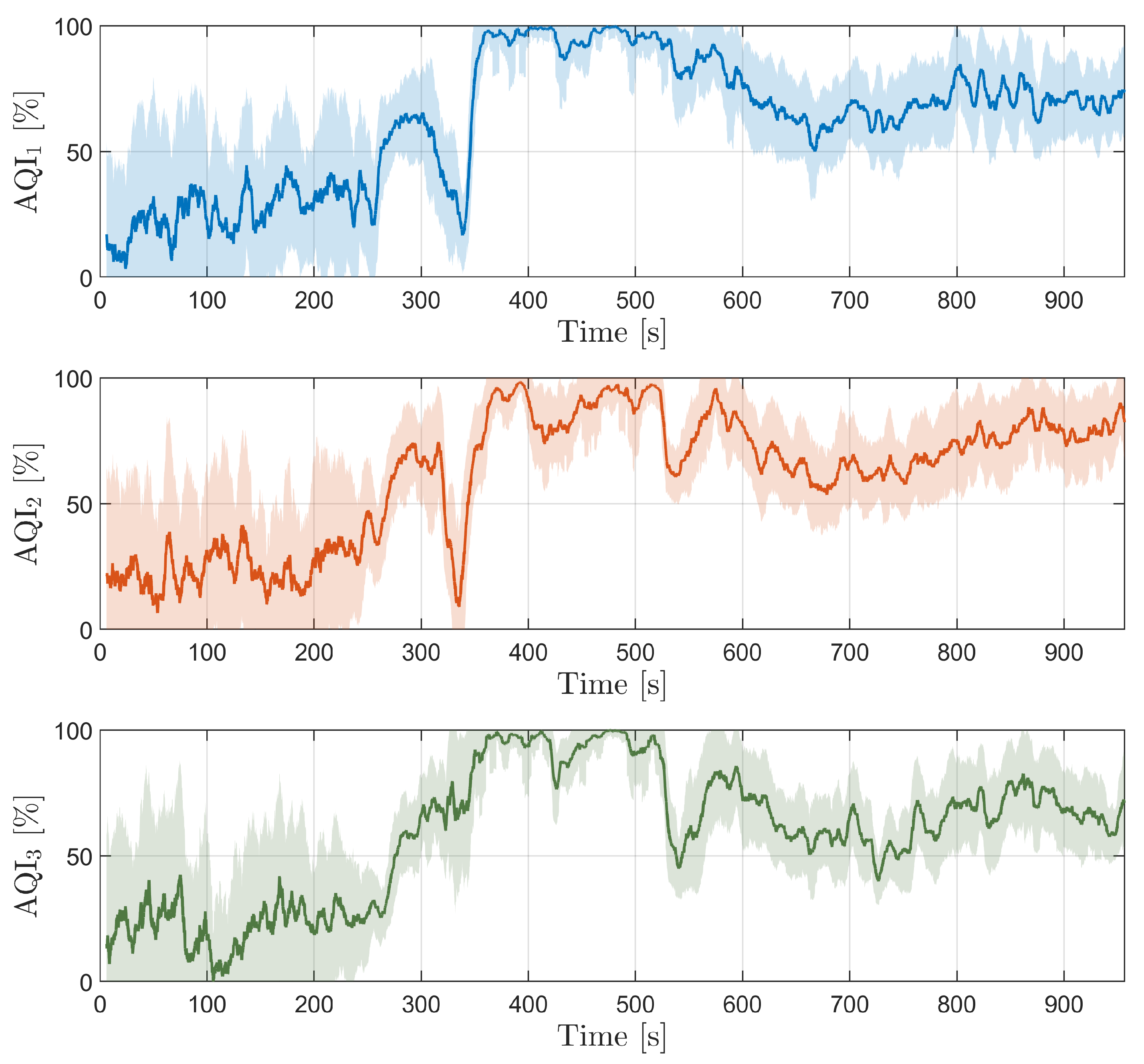
4. Arc Quality Index (AQI)
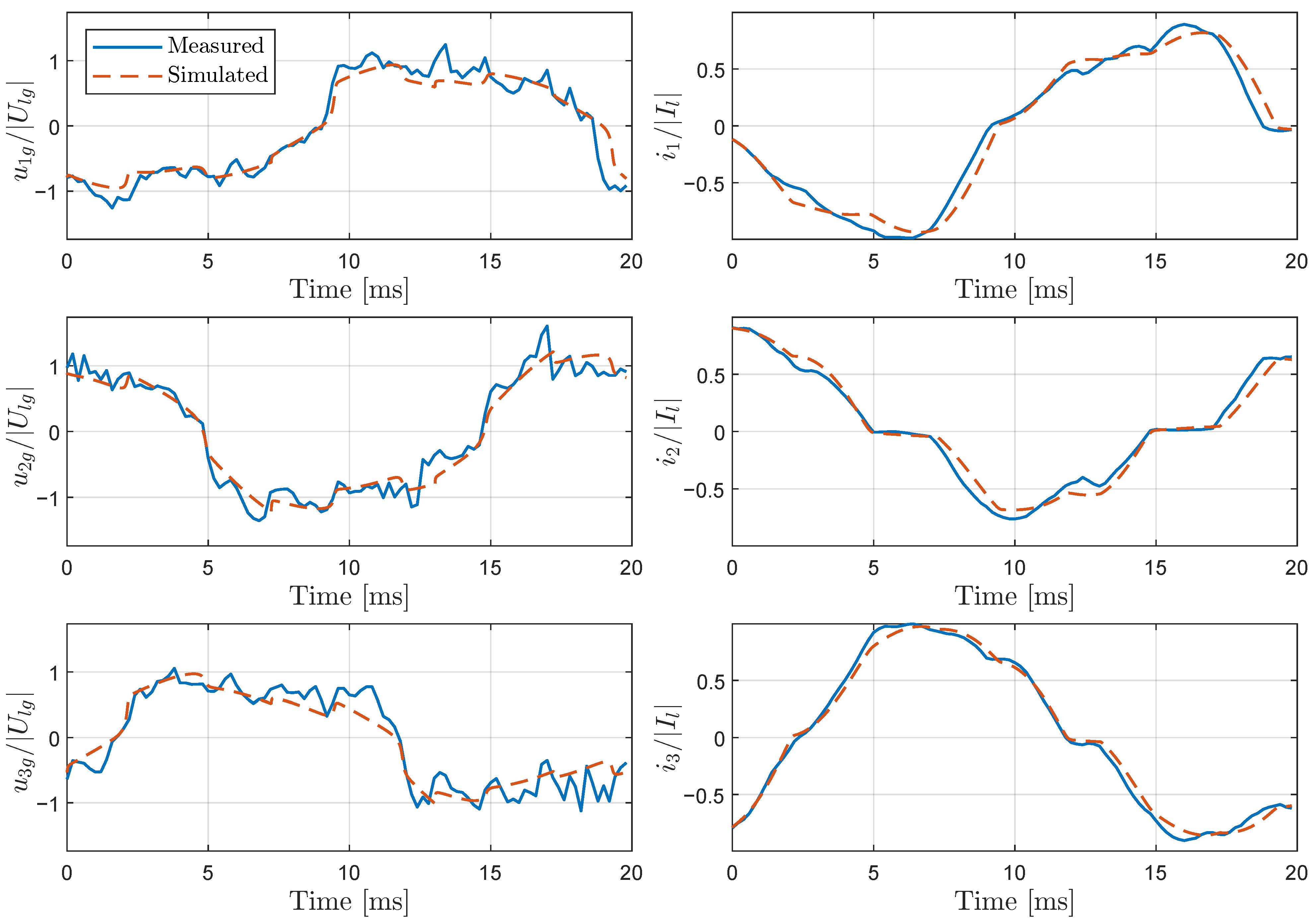
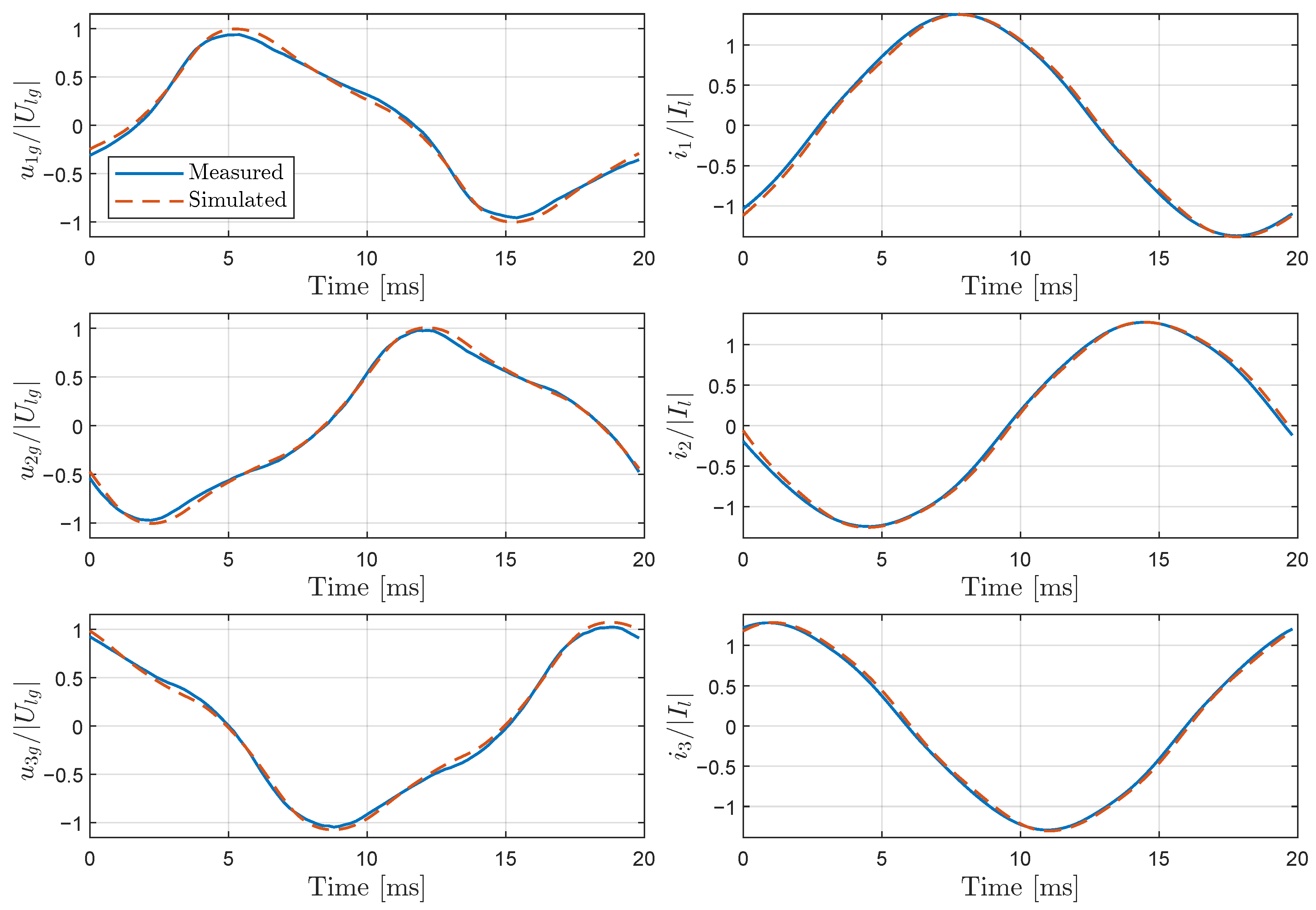
5. Results
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AQI | Arc Quality Index |
| CAM | Channel Arc Models |
| EAF | Electric Arc Furnace |
| KPI | Key Performance Indicator |
| LSTM | Long Short-Term Memory |
| MHD | MagnetoHydroDynamic |
| MP | Measuring Point |
| PCC | Point of Common Coupling |
| PSO | Particle Swarm Optimization |
| RMS | Root Mean Square |
| THD | Total Harmonic Distortion |
References
- Basson, E. World Steel in Figures; World Steel Association: Brussels, Belgium, 2022; pp. 1–17. [Google Scholar]
- World Economic Forum. Net-Zero Industry Tracker 2022. 2022. Available online: https://www.weforum.org/publications/the-net-zero-industry-tracker/ (accessed on 10 October 2023).
- Blažič, A.; Škrjanc, I.; Logar, V. Soft sensor of bath temperature in an electric arc furnace based on a data-driven Takagi–Sugeno fuzzy model. Appl. Soft Comput. 2021, 113, 107949. [Google Scholar] [CrossRef]
- Son, K.; Lee, J.; Hwang, H.; Jeon, W.; Yang, H.; Sohn, I.; Kim, Y.; Um, H. Slag foaming estimation in the electric arc furnace using machine learning based long short-term memory networks. J. Mater. Res. Technol. 2021, 12, 555–568. [Google Scholar] [CrossRef]
- Logar, V.; Dovžan, D.; Škrjanc, I. Mathematical modeling and experimental validation of an electric arc furnace. ISIJ Int. 2011, 51, 382–391. [Google Scholar] [CrossRef]
- Logar, V.; Dovžan, D.; Škrjanc, I. Modeling and validation of an electric arc furnace: Part 1, heat and mass transfer. ISIJ Int. 2012, 52, 402–412. [Google Scholar] [CrossRef]
- Logar, V.; Dovžan, D.; Škrjanc, I. Modeling and validation of an electric arc furnace: Part 2, thermo-chemistry. ISIJ Int. 2012, 52, 413–423. [Google Scholar] [CrossRef]
- Logar, V.; Fathi, A.; Škrjanc, I. A Computational Model for Heat Transfer Coefficient Estimation in Electric Arc Furnace. Steel Res. Int. 2016, 87, 330–338. [Google Scholar] [CrossRef]
- Ciotti, J.A.; Pelfrey, D.L. Electrical equipment and operating power characteristics. Electr. Furn. Steelmak. 1985, 21–46. [Google Scholar]
- Garcia-Segura, R.; Castillo, J.V.; Martell-Chavez, F.; Longoria-Gandara, O.; Aguilar, J.O. Electric Arc furnace modeling with artificial neural networks and Arc length with variable voltage gradient. Energies 2017, 10, 1424. [Google Scholar] [CrossRef]
- Pauna, H.; Willms, T.; Aula, M.; Echterhof, T.; Huttula, M.; Fabritius, T. Electric Arc Length-Voltage and Conductivity Characteristics in a Pilot-Scale AC Electric Arc Furnace. Metall. Mater. Trans. B Process Metall. Mater. Process. Sci. 2020, 51, 1646–1655. [Google Scholar] [CrossRef]
- Sedivy, C.; Krump, R. Tools for Foaming Slag Operation at Eaf Steelmaking. Arch. Metall. Mater. 2008, 53, 1–5. [Google Scholar]
- Erives-Sánchez, O.; Micheloud-Vernackt, O. Electric arc coverage indicator for ac furnaces using a laser vibrometer and neural networks. ISIJ Int. 2018, 58, 1300–1306. [Google Scholar] [CrossRef]
- Martell, F.; Krüger, K.; Llamas, A.; Micheloud, O. Signal processing of virtual-neutral to ground voltage for power control in electric arc furnaces. Steel Res. Int. 2014, 85, 251–260. [Google Scholar] [CrossRef]
- Martell, F.; Deschamps, A.; Mendoza, R.; Meléndez, M.; Llamas, A.; Micheloud, O. Virtual neutral to ground voltage as stability index for electric arc furnaces. ISIJ Int. 2011, 51, 1846–1851. [Google Scholar] [CrossRef]
- Kim, K.; Jeong, J.; Lee, B.; Jung, B.; Kim, S. Phase stability index of AC furnace Arc based on RMS and THD. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014; pp. 1129–1134. [Google Scholar] [CrossRef]
- Guerra-Serrano, J.; Sánchez-Roca, A.; González-Yero, G.; Sánchez-Orozco, M.C.; de la Parte, M.P.; Macías, E.J.; Blanco-Fernández, J. New arc stability index for industrial ac three-phase electric arc furnaces based on acoustic signals. Sensors 2020, 20, 6840. [Google Scholar] [CrossRef] [PubMed]
- Golestani, S.; Samet, H. Generalised Cassie-Mayr electric arc furnace models. IET Gener. Transm. Distrib. 2016, 10, 3364–3373. [Google Scholar] [CrossRef]
- Cassie, A.M. Theorie Nouvelle des Arcs de Rupture et de la Rigidité des Circuits. CIGRE 1939, 102, 588–608. [Google Scholar]
- Mayr, O. Beiträge zur Theorie des statischen und des dynamischen Lichtbogens. Arch. Elektrotechnik 1943, 37, 588–608. [Google Scholar] [CrossRef]
- Tseng, K.J.; Wang, Y.; Vilathgamuwa, D.M. An experimentally verified hybrid Cassie-Mayr electric arc model for power electronics simulations. IEEE Trans. Power Electron. 1997, 12, 429–436. [Google Scholar] [CrossRef]
- Hani, H.; Abdel-Rahman, M.A.; Ezzat, M.; Kamh, M.Z. Time Domain Analysis and Parameter Tuning of Electric Arc Furnace using Cassie- Mayr Model. In Proceedings of the 2022 23rd International Middle East Power Systems Conference, MEPCON 2022, Cairo, Egypt, 13–15 December 2022; pp. 1–8. [Google Scholar] [CrossRef]
- Yang, F.; Tang, Z.; Shen, Y.; Su, L.; Yang, Z. Parameter Determination Method of Cassie-Mayr Hybrid Arc Model Based on Magnetohydrodynamics Plasma Theory. Front. Energy Res. 2022, 10, 808289. [Google Scholar] [CrossRef]
- Lee, Y.; Nordborg, H.; Suh, Y.; Steimer, P. Arc stability criteria in AC arc furnace and optimal converter topologies. In Proceedings of the Conference Proceedings—IEEE Applied Power Electronics Conference and Exposition—APEC, Anaheim, CA, USA, 25–28 February 2007; pp. 1280–1286. [Google Scholar] [CrossRef]
- Jalil, M.; Samet, H.; Ghanbari, T.; Tajdinian, M. An Enhanced Cassie-Mayr-Based Approach for DC Series Arc Modeling in PV Systems. IEEE Trans. Instrum. Meas. 2021, 70, 1–10. [Google Scholar] [CrossRef]
- Khakpour, A.; Franke, S.; Gortschakow, S.; Uhrlandt, D.; Methling, R.; Weltmann, K.D. An Improved Arc Model Based on the Arc Diameter. IEEE Trans. Power Deliv. 2016, 31, 1335–1341. [Google Scholar] [CrossRef]
- Gimenez, W.; Hevia, O. Method to determine the parameters of the electric arc from test data. In Proceedings of the International Conference on Power Systems Transients, IPST 1999, Budapest, Hungary, 20–24 June 1999; pp. 505–508. [Google Scholar]
- Schavemaker, P.H.; Van Der Sluis, L. An improved Mayr-type arc model based on current-zero measurements. IEEE Trans. Power Deliv. 2000, 15, 580–584. [Google Scholar] [CrossRef]
- Guardado, J.L.; Maximov, S.G.; Melgoza, E.; Naredo, J.L.; Moreno, P. An improved arc model before current zero based on the combined Mayr and Cassie arc models. IEEE Trans. Power Deliv. 2005, 20, 138–142. [Google Scholar] [CrossRef]
- Maximov, S.; Venegas, V.; Guardado, J.L.; Melgoza, E.; Torres, D. Asymptotic methods for calculating electric arc model parameters. Electr. Eng. 2012, 94, 89–96. [Google Scholar] [CrossRef]
- Zhang, G.; Liu, Y.; Qi, L.; Xu, Y.; Kurrat, M. Parameter Estimation of Black Box Arc Model based on Heuristic Optimization Algorithms. Electr. Contacts Proc. Annu. Holm Conf. Electr. Contacts 2019, 2018, 66–70. [Google Scholar] [CrossRef]
- Pessoa, F.P.; Acosta, J.S.; Tavares, M.C. Parameter estimation of DC black-Box arc models using genetic algorithms. Electr. Power Syst. Res. 2021, 198, 107322. [Google Scholar] [CrossRef]
- Babaei, Z.; Samet, H.; Jalil, M. An innovative approach considering active power and harmonics for modeling the electric arc furnace along with analyzing time-varying coefficients based on ARMA models. Int. J. Electr. Power Energy Syst. 2023, 153, 109377. [Google Scholar] [CrossRef]
- Acha, E.; Semlyen, A.; Rajakovic, N. A harmonic domain computational package for nonlinear problems and its application to electric arcs. IEEE Trans. Power Deliv. 1990, 5, 1390–1397. [Google Scholar] [CrossRef]
- Solati Alkaran, D.; Vatani, M.; Sanjari, M.J.; Gharehpetian, G.B. Parameters estimation of electric arc furnace based on an analytical solution of power balance equation. Int. Trans. Electr. Energy Syst. 2017, 27, e2295. [Google Scholar] [CrossRef]
- Sawicki, A. Mathematical Model of an Electric Arc in Differential and Integral Forms with the Plasma Column Radius as a State Variable. Acta Energetica 2020, 43, 57–72. [Google Scholar] [CrossRef]
- Dietz, M.; Grabowski, D.; Klimas, M.; Starkloff, H.J. Estimation and Analysis of the Electric Arc Furnace Model Coefficients. IEEE Trans. Power Deliv. 2022, 37, 4956–4967. [Google Scholar] [CrossRef]
- Marulanda-Durango, J.J.; Zuluaga-Ríos, C.D. A meta-heuristic optimization-based method for parameter estimation of an electric arc furnace model. Results Eng. 2023, 17, 100850. [Google Scholar] [CrossRef]
- Klimas, M.; Grabowski, D. Application of long short-term memory neural networks for electric arc furnace modeling. Appl. Soft Comput. 2023, 145, 110574. [Google Scholar] [CrossRef]
- Haraldsson, H.; Tesfahunegn, Y.A.; Tangstad, M.; Sævarsdottir, G. Modelling of Electric Arcs for Industrial Applications, a Review. In Proceedings of the 16th International Ferro-Alloys Congress (INFACON XVI), 12 September 2021; SINTEF Industry: Trondheim, Norway, 2021. [Google Scholar] [CrossRef]
- Sanchez, J.; Ramírez-Argaez, M.; Conejo, A. Power delivery from the arc in AC electric arc furnaces with different gas atmospheres. Steel Res. Int. 2009, 80, 113–120. [Google Scholar] [CrossRef]
- Kim, S.; Jeong, J.J.; Kim, K.; Choi, J.H.; Kim, S.W. Arc stability index using phase electrical power in AC electric arc furnace. In Proceedings of the International Conference on Control, Automation and Systems, Gwangju, Republic of Korea, 20–23 October 2013; pp. 1725–1728. [Google Scholar] [CrossRef]
- Fathi, A.; Saboohi, Y.; Škrjanc, I.; Logar, V. Low computational-complexity model of EAF Arc-heat distribution. ISIJ Int. 2015, 55, 1353–1360. [Google Scholar] [CrossRef]
- Nikolaev, A.A.; Tulupov, P.G.; Antropova, L.I. Heating stage diagnostics of the electric arc furnace based on the data about harmonic composition of the arc voltage. In Proceedings of the 2018 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering, ElConRus 2018, Moscow and St. Petersburg, Russia, 29 January–1 February 2018; pp. 742–747. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar] [CrossRef]
- Pedersen, M.E.H. Good Parameters for Particle Swarm Optimization; Technical Report no. HL1001; Hvass Laboratories: Copenhagen, Denmark, 2010; pp. 1551–3203. [Google Scholar]
- Kohle, S.; Knoop, M.; Lichterbeck, R. Lichtbogenreaktanzen von Drehstrom-Lichtbogenöfen. ElektrowÄRme Int. Ed. Ind. ElektrowÄRme 1993, 51, 175–185. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fitness [%] | All | Melting | Refining |
|---|---|---|---|
| 1.40 | 2.39 | 0.77 | |
| 1.97 | 3.19 | 1.19 | |
| 0.83 | 1.59 | 0.35 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Blažič, A.; Škrjanc, I.; Logar, V. Arc Quality Index Based on Three-Phase Cassie–Mayr Electric Arc Model of Electric Arc Furnace. Metals 2024, 14, 338. https://doi.org/10.3390/met14030338
Blažič A, Škrjanc I, Logar V. Arc Quality Index Based on Three-Phase Cassie–Mayr Electric Arc Model of Electric Arc Furnace. Metals. 2024; 14(3):338. https://doi.org/10.3390/met14030338
Chicago/Turabian StyleBlažič, Aljaž, Igor Škrjanc, and Vito Logar. 2024. "Arc Quality Index Based on Three-Phase Cassie–Mayr Electric Arc Model of Electric Arc Furnace" Metals 14, no. 3: 338. https://doi.org/10.3390/met14030338