

Incorporating Rainfall Forecast Data in X-SLIP Platform to Predict the Triggering of Rainfall-Induced Shallow Landslides in Real Time


Abstract
:1. Introduction
2. Materials and Methods
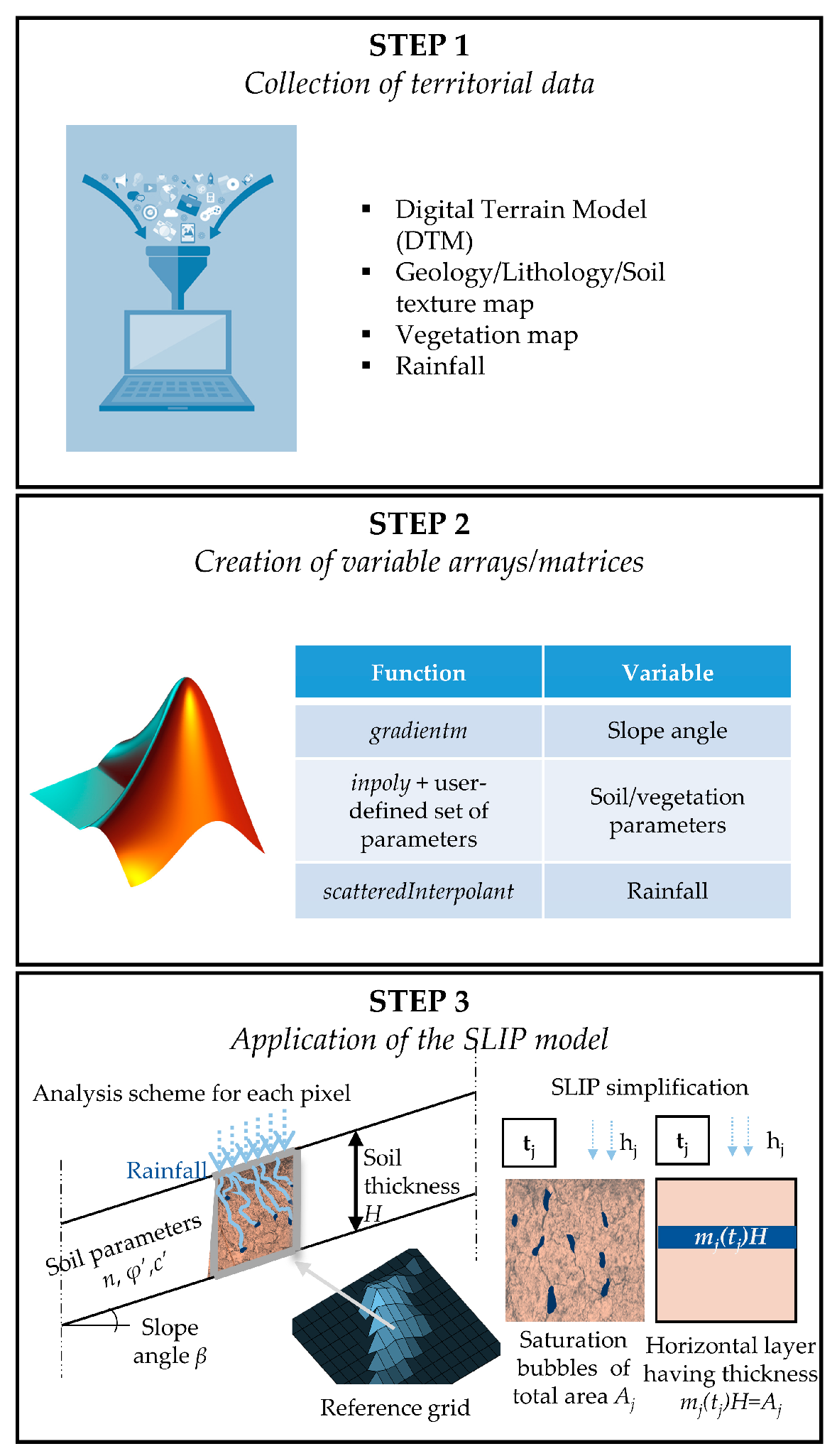
2.1. The SLIP Model and X-SLIP Platform
2.2. A New Feature of X-SLIP Platform for Real-Time Prediction through Rainfall Forecasts
3. Application of the Updated X-SLIP Platform in Some Towns of the Emilia Apennines (Northern Italy) Involved by Soil Slips on 5 April
3.1. Case Study Description
3.2. Real-Time Hindcasts on April 2013 through X-SLIP
4. Results
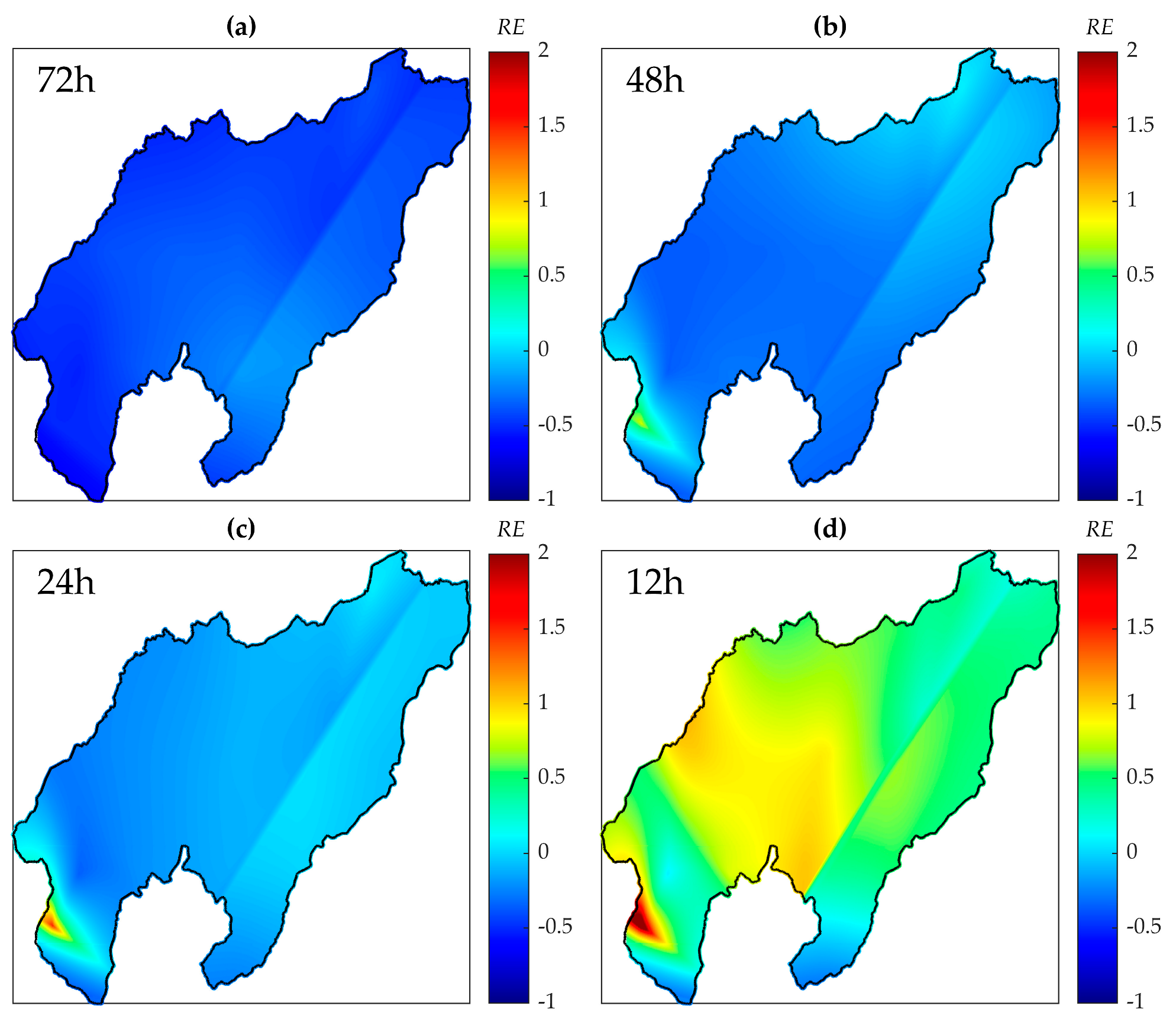
4.1. Cumulative Rainfall of Forecasts and Recordings
4.2. Factor of Safety on 5 April 2013 at 12 p.m.
4.3. ROC Analysis from Predictions on 5 April 2013 12 a.m.
4.4. Factor of Safety on a Non-Landslide Event
5. Discussion
6. Conclusions
- X-SLIP analyses based on the combination of rainfall forecast and recordings are as accurate as the ones based only on recordings. This is observed both in landslide and non-landslide events (when no landslide should have occurred).
- The quality of X-SLIP predictions in real-time is strongly dependent on the quality of rainfall forecasts.
- Most of the instabilities that occurred in the Emilia Romagna region in April 2013 would have been well predicted by X-SLIP 24 h in advance.
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wijeratne, V.P.I.S.; Li, G.; Mehmood, M.S.; Abbas, A. Assessing the Impact of Long-Term ENSO, SST, and IOD Dynamics on Extreme Hydrological Events (EHEs) in the Kelani River Basin (KRB), Sri Lanka. Atmosphere 2023, 14, 79. [Google Scholar] [CrossRef]
- Elahi, E.; Khalid, Z.; Tauni, M.Z.; Zhang, H.; Lirong, X. Extreme weather events risk to crop-production and the adaptation of innovative management strategies to mitigate the risk: A retrospective survey of rural Punjab, Pakistan. Technovation 2022, 117, 102255. [Google Scholar] [CrossRef]
- Willems, P.; Arnbjerg-Nielsen, K.; Olsson, J.; Nguyen, V.T.V. Climate change impact assessment on urban rainfall extremes and urban drainage: Methods and shortcomings. Atmos. Res. 2012, 103, 106–118. [Google Scholar] [CrossRef]
- Roccati, A.; Paliaga, G.; Luino, F.; Faccini, F.; Turconi, L. Rainfall Threshold for Shallow Landslides Initiation and Analysis of Long-Term Rainfall Trends in a Mediterranean Area. Atmosphere 2020, 11, 1367. [Google Scholar] [CrossRef]
- Jakob, M.; Owen, T. Projected effects of climate change on shallow landslides, North Shore Mountains, Vancouver, Canada. Geomorphology 2021, 393, 107921. [Google Scholar] [CrossRef]
- Ferrer, J.; Guo, Z.; Medina, V.; Puig-Polo, C.; Hürlimann, M. A Framework to Project Future Rainfall Scenarios: An Application to Shallow Landslide-Triggering Summer Rainfall in Wanzhou County China. Water 2022, 14, 873. [Google Scholar] [CrossRef]
- Fredlund, D.G.; Rahardjo, H. Soil Mechanics for Unsaturated Soils; Wiley: New York, NY, USA, 1993. [Google Scholar] [CrossRef]
- Gu, W.; Li, Z.; Lin, C.; Zhang, F.; Dong, M.; Li, Y.; Liu, C. Failure Process Analysis of Landslide Triggered by Rainfall at Volcanic Area: Fangshan Landslide Case Study. Water 2022, 14, 4059. [Google Scholar] [CrossRef]
- Lee, J.-U.; Cho, Y.-C.; Kim, M.; Jang, S.-J.; Lee, J.; Kim, S. The Effects of Different Geological Conditions on Landslide-Triggering Rainfall Conditions in South Korea. Water 2022, 14, 2051. [Google Scholar] [CrossRef]
- Paronuzzi, P.; Del Fabbro, M.; Bolla, A. Soil Moisture Profiles of Unsaturated Colluvial Slopes Susceptible to Rainfall-Induced Landslides. Geosciences 2022, 12, 6. [Google Scholar] [CrossRef]
- Yang, S.-R.; Huang, L.-J. Infiltration and Failure Behavior of an Unsaturated Soil Slope under Artificial Rainfall Model Experiments. Water 2023, 15, 1599. [Google Scholar] [CrossRef]
- Petley, D. Global patterns of loss of life from landslides. Geology 2012, 40, 927–930. [Google Scholar] [CrossRef]
- Park, H.J.; Lee, J.H.; Woo, I.K. Assessment of rainfall-induced shallow landslide susceptibility using a GIS-based probabilistic approach. Eng. Geol. 2013, 161, 1–15. [Google Scholar] [CrossRef]
- Zhang, J.; Qiu, H.; Tang, B.; Yang, D.; Liu, Y.; Liu, Z.; Ye, B.; Zhou, W.; Zhu, Y. Accelerating Effect of Vegetation on the Instability of Rainfall-Induced Shallow Landslides. Remote Sens. 2022, 14, 5743. [Google Scholar] [CrossRef]
- Asima, H.; Niedzinski, V.; O’Donnell, F.C.; Montgomery, J. Comparison of Vegetation Types for Prevention of Erosion and Shallow Slope Failure on Steep Slopes in the Southeastern USA. Land 2022, 11, 1739. [Google Scholar] [CrossRef]
- Pisano, M.; Cardile, G. Probabilistic Analyses of Root-Reinforced Slopes Using Monte Carlo Simulation. Geosciences 2023, 13, 75. [Google Scholar] [CrossRef]
- Chae, B.G.; Park, H.J.; Catani, F.; Simoni, A.; Berti, M. Landslide prediction, monitoring and early warning: A concise review of state-of-the-art. Geosci. J. 2017, 21, 1033–1070. [Google Scholar] [CrossRef]
- Mirus, B.B.; Morphew, M.D.; Smith, J.B. Developing Hydro-Meteorological Thresholds for Shallow Landslide Initiation and 505 Early Warning. Water 2018, 10, 1274. [Google Scholar] [CrossRef] [Green Version]
- Piciullo, L.; Calvello, M.; Cepeda, J.M. Territorial early warning systems for rainfall-induced landslides. Earth Sci. Rev. 2018, 179, 228–247. [Google Scholar] [CrossRef]
- Tiranti, D.; Nicolò, G.; Gaeta, A.R. Shallow landslides predisposing and triggering factors in developing a regional early warning system. Landslides 2019, 16, 235–251. [Google Scholar] [CrossRef]
- Pecoraro, G.; Calvello, M.; Piciullo, L. Monitoring strategies for local landslide early warning systems. Landslides 2019, 16, 213–231. [Google Scholar] [CrossRef]
- Intrieri, E.; Carlà, T.; Gigli, G. Forecasting the time of failure of landslides at slope-scale: A literature review. Earth Sci. Rev. 2019, 193, 333–349. [Google Scholar] [CrossRef]
- Guzzetti, F.; Gariano, S.L.; Peruccacci, S.; Brunetti, M.T.; Marchesini, I.; Rossi, M.; Melillo, M. Geographical landslide early warning systems. Earth Sci. Rev. 2020, 200, 102973. [Google Scholar] [CrossRef]
- Guo, B.; Pei, X.; Xu, M.; Li, T. Analyzing Rainfall Threshold for Shallow Landslides Using Physically Based Modeling in Rasuwa District, Nepal. Water 2022, 14, 4074. [Google Scholar] [CrossRef]
- Deng, R.; Liu, H.; Zheng, X.; Zhang, Q.; Liu, W.; Chen, L. Towards Establishing Empirical Rainfall Thresholds for Shallow Landslides in Guangzhou, Guangdong Province, China. Water 2022, 14, 3914. [Google Scholar] [CrossRef]
- Troncone, A.; Pugliese, L.; Conte, E. Rainfall Threshold for Shallow Landslide Triggering Due to Rising Water Table. Water 2022, 14, 2966. [Google Scholar] [CrossRef]
- Luino, F.; De Graff, J.; Biddoccu, M.; Faccini, F.; Freppaz, M.; Roccati, A.; Ungaro, F.; D’Amico, M.; Turconi, L. The Role of Soil Type in Triggering Shallow Landslides in the Alps (Lombardy, Northern Italy). Land 2022, 11, 1125. [Google Scholar] [CrossRef]
- Yuniawan, R.A.; Rifa’i, A.; Faris, F.; Subiyantoro, A.; Satyaningsih, R.; Hidayah, A.N.; Hidayat, R.; Mushthofa, A.; Ridwan, B.W.; Priangga, E.; et al. Revised Rainfall Threshold in the Indonesian Landslide Early Warning System. Geosciences 2022, 12, 129. [Google Scholar] [CrossRef]
- Nnanwuba, U.E.; Qin, S.; Adeyeye, O.A.; Cosmas, N.C.; Yao, J.; Qiao, S.; Jingbo, S.; Egwuonwu, E.M. Prediction of Spatial Likelihood of Shallow Landslide Using GIS-Based Machine Learning in Awgu, Southeast/Nigeria. Sustainability 2022, 14, 12000. [Google Scholar] [CrossRef]
- Qi, T.; Zhao, Y.; Meng, X.; Chen, G.; Dijkstra, T. AI-Based Susceptibility Analysis of Shallow Landslides Induced by Heavy Rainfall in Tianshui, China. Remote Sens. 2021, 13, 1819. [Google Scholar] [CrossRef]
- Xiao, T.; Zhang, L.M.; Cheung, R.W.M.; Lacasse, S. Predicting spatio-temporal man-made slope failures induced by rainfall in Hong Kong using machine learning techniques. Géotechnique 2022, 1–17. [Google Scholar] [CrossRef]
- Xiao, T.; Zhang, L.M. Data-driven landslide forecasting: Methods, data completeness, and real-time warning. Eng. Geol. 2023, 317, 107068. [Google Scholar] [CrossRef]
- Feng, L.; Guo, M.; Wang, W.; Chen, Y.; Shi, Q.; Guo, W.; Lou, Y.; Kang, H.; Chen, Z.; Zhu, Y. Comparative Analysis of Machine Learning Methods and a Physical Model for Shallow Landslide Risk Modeling. Sustainability 2023, 15, 6. [Google Scholar] [CrossRef]
- Sala, G.; Lanfranconi, C.; Frattini, P.; Rusconi, G.; Crosta, G.B. Cost-sensitive rainfall thresholds for shallow landslides. Landslides 2021, 18, 2979–2992. [Google Scholar] [CrossRef]
- Rosi, A.; Segoni, S.; Canavesi, V.; Monni, A.; Gallucci, A.; Casagli, N. Definition of 3D rainfall thresholds to increase operative landslide early warning system performances. Landslides 2021, 18, 1045–1057. [Google Scholar] [CrossRef]
- Uwihirwe, J.; Hrachowitz, M.; Bogaard, T.A. Landslide precipitation thresholds in Rwanda. Landslides 2020, 17, 2469–2481. [Google Scholar] [CrossRef]
- Abraham, M.T.; Satyam, N.; Bulzinetti, M.A.; Pradhan, B.; Pham, B.T.; Segoni, S. Using field-based monitoring to enhance the performance of rainfall thresholds for landslide warning. Water 2020, 12, 3453. [Google Scholar] [CrossRef]
- Park, H.-J.; Jang, J.-Y.; Lee, J.-H. Physically Based Susceptibility Assessment of Rainfall-Induced Shallow Landslides Using a Fuzzy Point Estimate Method. Remote Sens. 2017, 9, 487. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; Lan, H.; Gao, X.; Li, L.; Yang, Z. A simplified physically based coupled rainfall threshold model for triggering landslides. Eng. Geol. 2015, 195, 63–69. [Google Scholar] [CrossRef]
- Troncone, A.; Pugliese, L.; Conte, E. A Simplified Analytical Method to Predict Shallow Landslides Induced by Rainfall in Unsaturated Soils. Water 2022, 14, 3180. [Google Scholar] [CrossRef]
- D’Ippolito, A.; Lupiano, V.; Rago, V.; Terranova, O.G.; Iovine, G. Triggering of Rain-Induced Landslides, with Applications in Southern Italy. Water 2023, 15, 277. [Google Scholar] [CrossRef]
- Ma, S.; Shao, X.; Xu, C.; Xu, Y. Insight from a Physical-Based Model for the Triggering Mechanism of Loess Landslides Induced by the 2013 Tianshui Heavy Rainfall Event. Water 2023, 15, 443. [Google Scholar] [CrossRef]
- Montgomery, D.R.; Dietrich, W.E. A physically based model for the topographic control on shallow landsliding. Water Resour. Res. 1994, 30, 1153–1171. [Google Scholar] [CrossRef]
- Montrasio, L. Stability analysis of soil-slip. In Proceedings of the International Conference Risk, Bologna, Italy, 11–13 October 2000; Brebbia, C.A., Ed.; Wit Press: Southampton, UK, 2000. [Google Scholar]
- Baum, R.L.; Savage, W.Z.; Godt, J.W. TRIGRS—A Fortran Program for Transient Rainfall Infiltration and Grid-Based Regional Slope-Stability Analysis, Version 2.0; U.S. Geological Survey: Reston, VA, USA, 2008. [Google Scholar]
- Montrasio, L.; Valentino, R. Experimental analysis and modelling of shallow landslides. Landslides 2007, 4, 291–296. [Google Scholar] [CrossRef]
- Montrasio, L.; Valentino, R.; Losi, G.L. Towards a real-time susceptibility assessment of rainfall-induced shallow landslides on a regional scale. Nat. Hazards Earth Syst. Sci. 2011, 11, 1927–1947. [Google Scholar] [CrossRef] [Green Version]
- Rossi, G.; Catani, F.; Leoni, L.; Segoni, S.; Tofani, V. HIRESSS: A physically based slope stability simulator for HPC applications. Nat. Hazards Earth Syst. Sci. 2013, 13, 151–166. [Google Scholar] [CrossRef] [Green Version]
- Moresi, F.V.; Maesano, M.; Collalti, A.; Sidle, R.C.; Matteucci, G.; Scarascia Mugnozza, G. Mapping Landslide Prediction through a GIS-Based Model: A Case Study in a Catchment in Southern Italy. Geosciences 2020, 10, 309. [Google Scholar] [CrossRef]
- Ho, J.Y.; Liu, C.H.; Chen, W.B.; Chang, C.-H.; Lee, K.T. Using ensemble quantitative precipitation forecast for rainfall-induced shallow landslide predictions. Geosci. Lett. 2022, 9, 22. [Google Scholar] [CrossRef]
- Montrasio, L.; Valentino, R. A model for triggering mechanism of shallow landslides. Nat. Hazards Earth Syst. Sci. 2008, 8, 1149–1159. [Google Scholar] [CrossRef]
- Montrasio, L.; Valentino, R.; Losi, G.L. Rainfall-induced shallow landslides: A model for the triggering mechanism of some case studies in Northern Italy. Landslides 2009, 6, 241–251. [Google Scholar] [CrossRef]
- Montrasio, L.; Valentino, R.; Losi, G.L. Shallow landslides triggered by rainfalls: Modeling of some case histories in the Reggiano Apennines (Emilia Romagna Region, Northern Italy). Nat. Hazards 2012, 60, 1231–1254. [Google Scholar] [CrossRef]
- Montrasio, L.; Valentino, R.; Corina, A.; Rossi, L.; Rudari, R. A prototype system for space–time assessment of rainfall-induced shallow landslides in Italy. Nat. Hazards 2014, 74, 1263–1290. [Google Scholar] [CrossRef]
- Montrasio, L.; Schilirò, L.; Terrone, A. Physical and numerical modelling of shallow landslides. Landslides 2016, 13, 873–883. [Google Scholar] [CrossRef]
- Montrasio, L.; Schilirò, L. Inferences on modeling rainfall-induced shallow landslides from experimental observations on stratified soils. Ital. J. Eng. Geol. Environ. 2018, 2, 77–85. [Google Scholar] [CrossRef]
- Gatto, M.P.A.; Lentini, V.; Montrasio, L.; Castelli, F. A simplified semi-quantitative procedure based on the SLIP model for landslide risk assessment: The case study of Gioiosa Marea (Sicily, Italy). Landslides 2023, 20, 1381–1403. [Google Scholar] [CrossRef]
- Gatto, M.P.A.; Montrasio, L. X-SLIP: A SLIP-based multi-approach algorithm to predict the spatial-temporal triggering of rainfall-induced shallow landslides over large areas. Comput. Geotech. 2023, 154, 105175. [Google Scholar] [CrossRef]
- Montrasio, L.; Gatto, M.P.A.; Miodini, C. The role of plants in the prevention of soil-slip: The G-SLIP model and its application on territorial scale through G-XSLIP platform. Landslides 2023, 20, 1149–1165. [Google Scholar] [CrossRef]
- Hungr, O.; Leroueil, S.; Picarelli, L. The Varnes classification of landslide types, an update. Landslides 2014, 11, 167–194. [Google Scholar] [CrossRef]
- Zieher, T.; Schneider-Muntau, B.; Mergili, M. Are real-world shallow landslides reproducible by physically-based models? Four test cases in the Laternser valley, Vorarlberg (Austria). Landslides 2017, 14, 2009–2023. [Google Scholar] [CrossRef] [Green Version]
- Losi, G.L. Spatiotemporal Modeling of Soil Slips: From Slope Scale to Territorial Scale (In Italian). Ph.D. Thesis, University of Parma, Parma, Italy, 2012. [Google Scholar]
- Hormann, K.; Agathos, A. The point in polygon problem for arbitrary polygons. Comput. Geom. 2001, 20, 131–144. [Google Scholar] [CrossRef] [Green Version]
- Engwirda, D. INPOLY: A Fast Points-in-Polygon Test. GitHub. Available online: https://github.com/dengwirda/inpoly (accessed on 26 May 2023).
- Sibson, R.H. Fluid flow accompanying faulting: Field evidence and models. In Earthquake Prediction; Simpson, D.W., Richards, P.G., Eds.; AGU: Washington, DC, USA, 1981. [Google Scholar] [CrossRef]
- Manikanta, V.; Teja, K.N.; Das, J.; Umamahesh, N.V. On the verification of ensemble precipitation forecasts over the Godavari River basin. J. Hydrol. 2023, 616, 128794. [Google Scholar] [CrossRef]
- Steger, C.; Bucchignani, E. Regional Climate Modelling with COSMO-CLM: History and Perspectives. Atmosphere 2020, 11, 1250. [Google Scholar] [CrossRef]
- Teng, M.; Li, S.; Xing, J.; Fan, C.; Yang, J.; Wang, S.; Song, G.; Ding, Y.; Dong, J.; Wang, S. 72-hour real-time forecasting of ambient PM2.5 by hybrid graph deep neural network with aggregated neighborhood spatiotemporal information. Environ. Int. 2023, 176, 107971. [Google Scholar] [CrossRef] [PubMed]
- Bertolini, G.; Corsini, A.; Tellini, C. Fingerprints of Large-Scale Landslides in the Landscape of the Emilia Apenniness. In Landscapes and Landforms of Italy. World Geomorphological Landscapes; Soldati, M., Marchetti, M., Eds.; Springer: Cham, Germany, 2017. [Google Scholar] [CrossRef]
- Terrone, A. The SLIP Model: A Major Step towards the Application in Real Time Civil Protection Integrated Platforms for Landslide Prevention. Ph.D. Thesis, Department of Architecture and Civil Engineering, University of Parma, Parma, Italy, 2015. [Google Scholar]
- Metz, C.E. Basic principles of ROC analysis. Semin. Nucl. Med. 1978, 8, 283–298. [Google Scholar] [CrossRef]
- Ciurleo, M.; Ferlisi, S.; Foresta, V.; Mandaglio, M.C.; Moraci, N. Landslide Susceptibility Analysis by Applying TRIGRS to a Reliable Geotechnical Slope Model. Geosciences 2022, 12, 18. [Google Scholar] [CrossRef]
- Baum, R.L.; Godt, J.W.; Savage, W.Z. Estimating the timing and location of shallow rainfall-induced landslides using a model for transient, unsaturated infiltration. J. Geophys. Res. 2010, 115, F03013. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lithology Abbreviation | Description | Soil Type | n (-) | φ′ (°) | c′ (kPa) | kt (h−1) | A (kPa) |
|---|---|---|---|---|---|---|---|
| Bl | Rocks made up of alternation with stone dominant levels | Sand | 0.40 | 35 | 0 | 0. 0180 | 40 |
| Blp | Rocks made up of an alternation of stone and pelitic levels | Sand | 0.40 | 35 | 0 | 0. 0180 | 40 |
| Bp | Rocks made up of alternation with pelitic dominant levels | Sand | 0.40 | 35 | 0 | 0. 0180 | 40 |
| Cc | Conglomerates and clast supported breccias | Sand | 0.40 | 35 | 0 | 0. 0180 | 40 |
| Dm | Marlstone | Deposits | 0.45 | 30 | 5 | 0.0250 | 40 |
| Dol | Claystone breccias | Clayey silt | 0.46 | 25 | 0 | 0.0180 | 80 |
| Dsc | Scaly clays | Clay | 0.50 | 20 | 10 | 0.0007 | 100 |
| Vegetative Species | cr (kPa) | β* (-) |
|---|---|---|
| Hay Meadow/Extensive Farming | - | 0.40 |
| Fagus sylvatica | 21.26 | 0.30 |
| Quercus pubescens | 0.2 | 0.17 |
| Quercus cerris | 25.9 | 0.21 |
| Ostrya carpinifolia | 14.4 | 0.20 |
| Castanea sativa | 14.0 | 0.45 |
| Non-native conifers | 0.2 | 0.30 |
| Case Analysed | Run of COSMO Model | Forecast Hours | Recording Hours |
|---|---|---|---|
| 12 h | 5 April 12 a.m. | 12 | 708 |
| 24 h | 4 April 12 p.m. | 24 | 696 |
| 48 h | 3 April 12 p.m. | 48 | 672 |
| 72 h | 2 April 12 p.m. | 72 | 648 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gatto, M.P.A. Incorporating Rainfall Forecast Data in X-SLIP Platform to Predict the Triggering of Rainfall-Induced Shallow Landslides in Real Time. Geosciences 2023, 13, 215. https://doi.org/10.3390/geosciences13070215
Gatto MPA. Incorporating Rainfall Forecast Data in X-SLIP Platform to Predict the Triggering of Rainfall-Induced Shallow Landslides in Real Time. Geosciences. 2023; 13(7):215. https://doi.org/10.3390/geosciences13070215
Chicago/Turabian StyleGatto, Michele Placido Antonio. 2023. "Incorporating Rainfall Forecast Data in X-SLIP Platform to Predict the Triggering of Rainfall-Induced Shallow Landslides in Real Time" Geosciences 13, no. 7: 215. https://doi.org/10.3390/geosciences13070215
APA StyleGatto, M. P. A. (2023). Incorporating Rainfall Forecast Data in X-SLIP Platform to Predict the Triggering of Rainfall-Induced Shallow Landslides in Real Time. Geosciences, 13(7), 215. https://doi.org/10.3390/geosciences13070215