
Applying a Hybrid Model of Markov Chain and Logistic Regression to Identify Future Urban Sprawl in Abouelreesh, Aswan: A Case Study

Abstract
:1. Introduction
1.1. Overview of Simulation and Driving Forces Methods
1.2. Logistic Regression
1.3. CA–Markov Chain Model
2. Study Area
3. Research Methodology and Data
3.1. Research Data
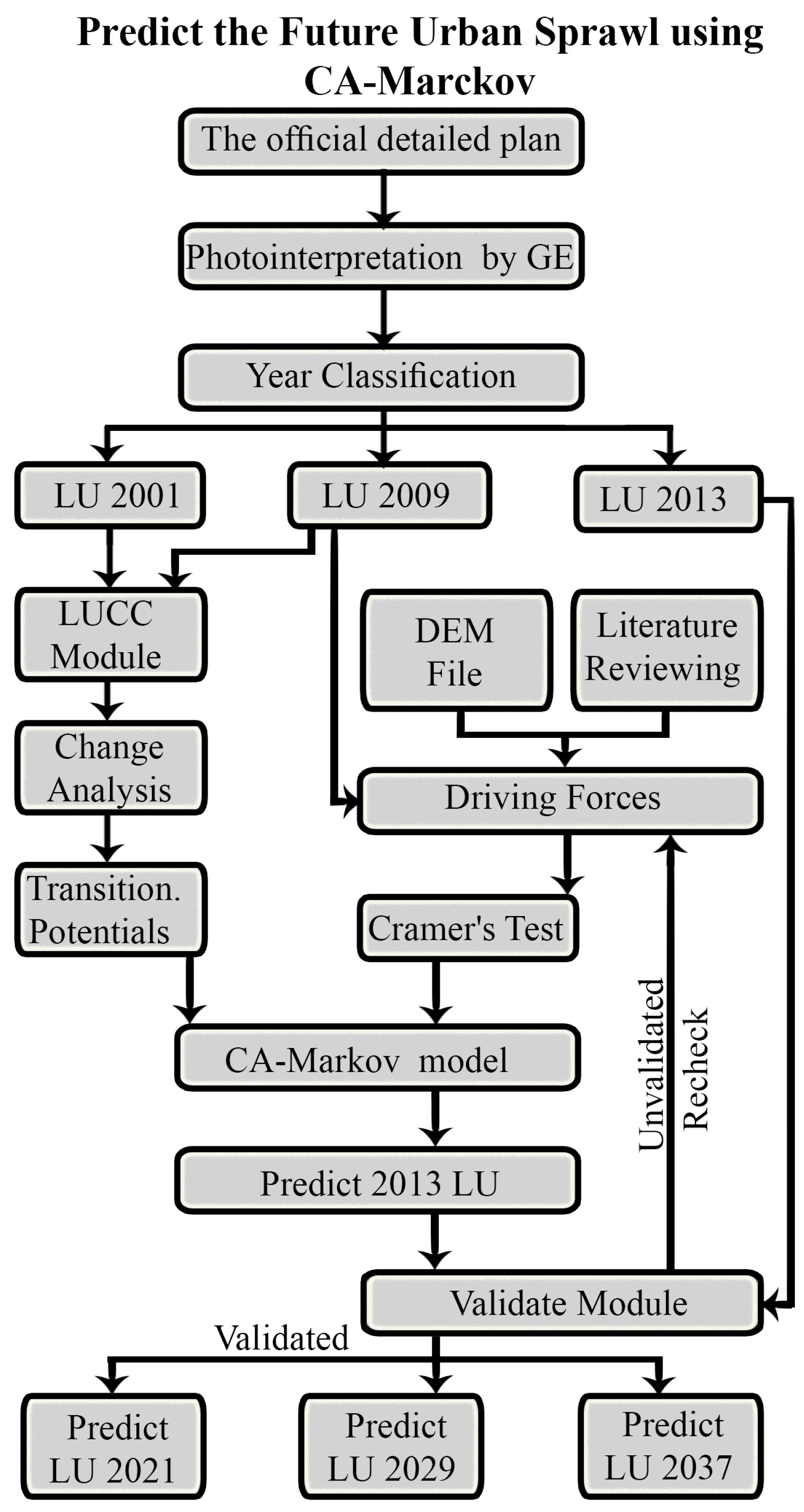
3.2. Hybrid Model of CA–MC and LR
3.3. Land Use/Cover Change Modeler
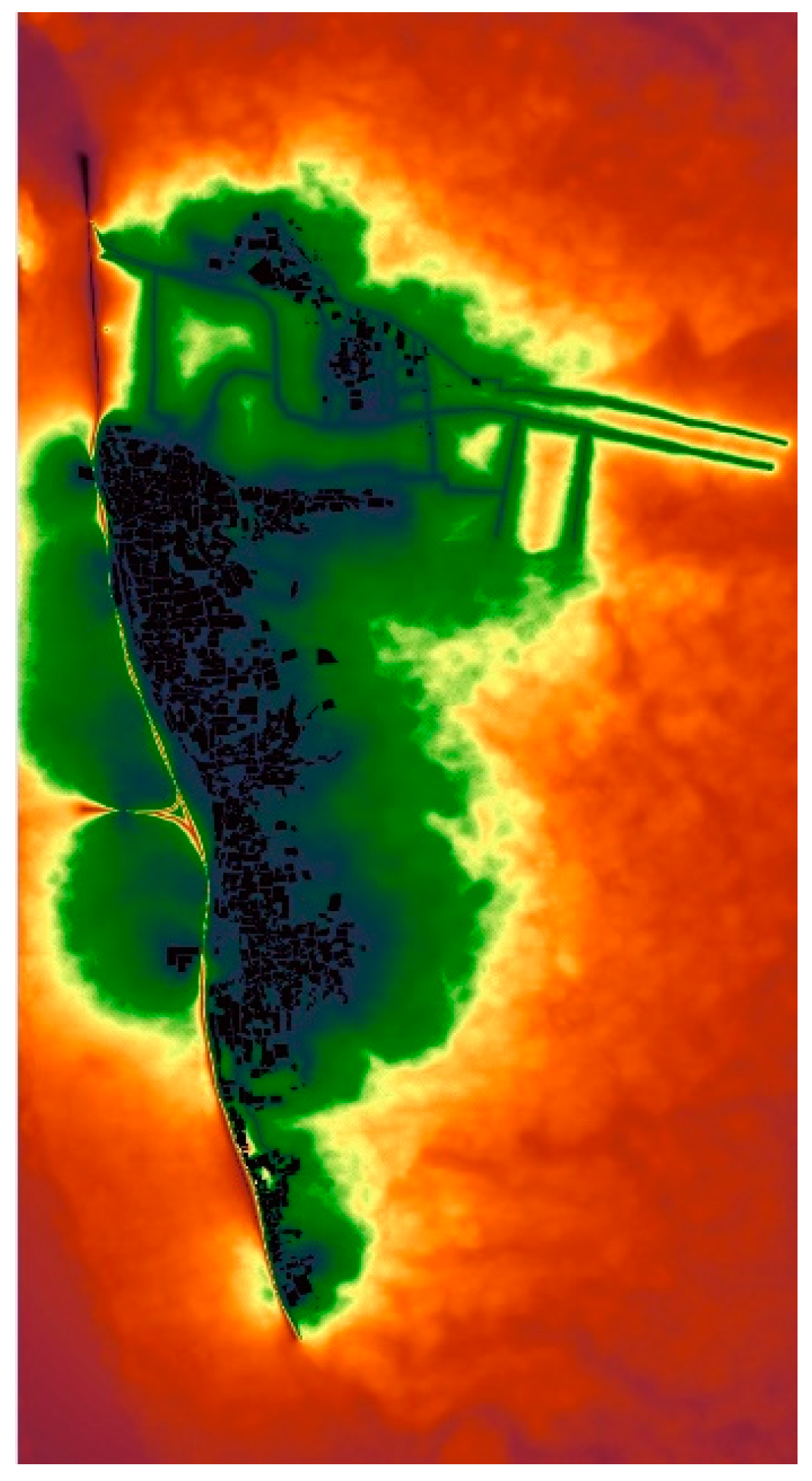
3.3.1. Identifying the Driving Forces
3.3.2. Identifying the Future Urban Sprawl
4. Results
4.1. Identify the Past Urban Sprawl
4.1.1. Transition Potentials
4.1.2. Test and Selection of Site and Driver Variables
4.1.3. Structure and Run Transition Sub-Model
4.1.4. Sign Evaluation
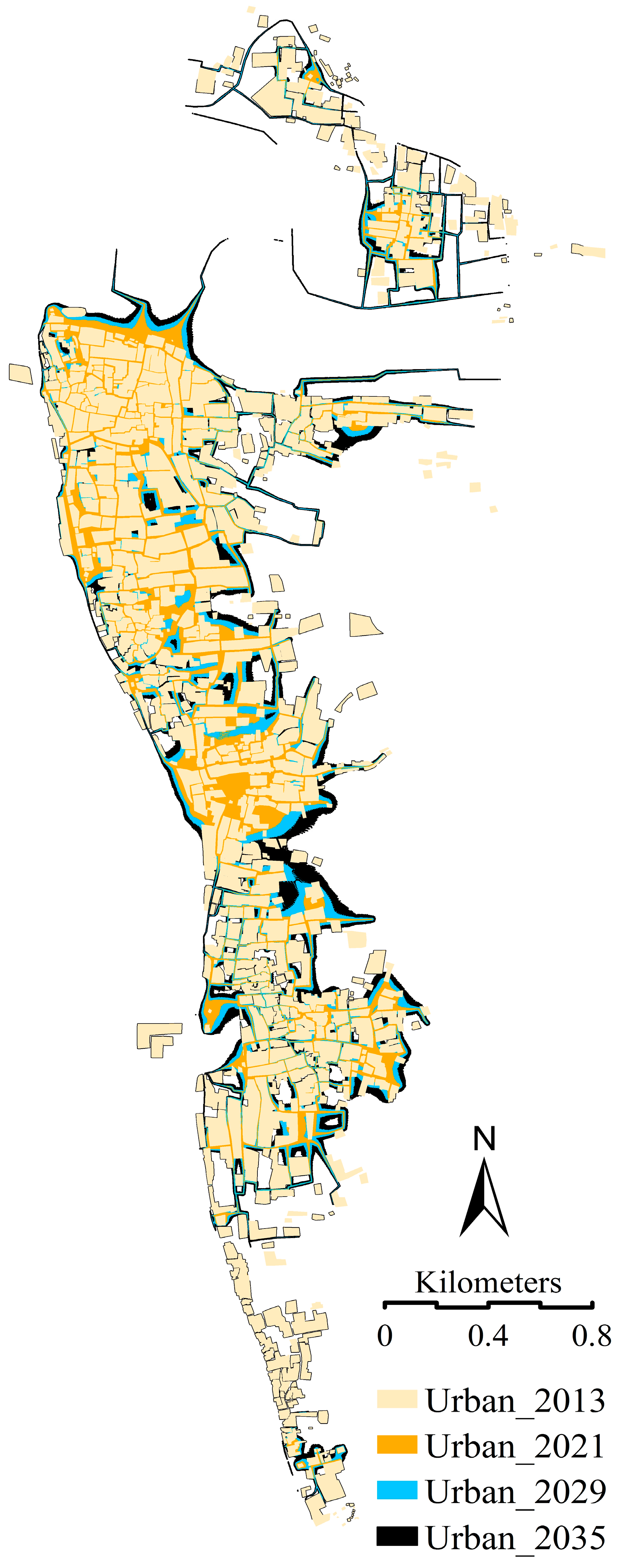
4.2. Future Sprawl in 2037
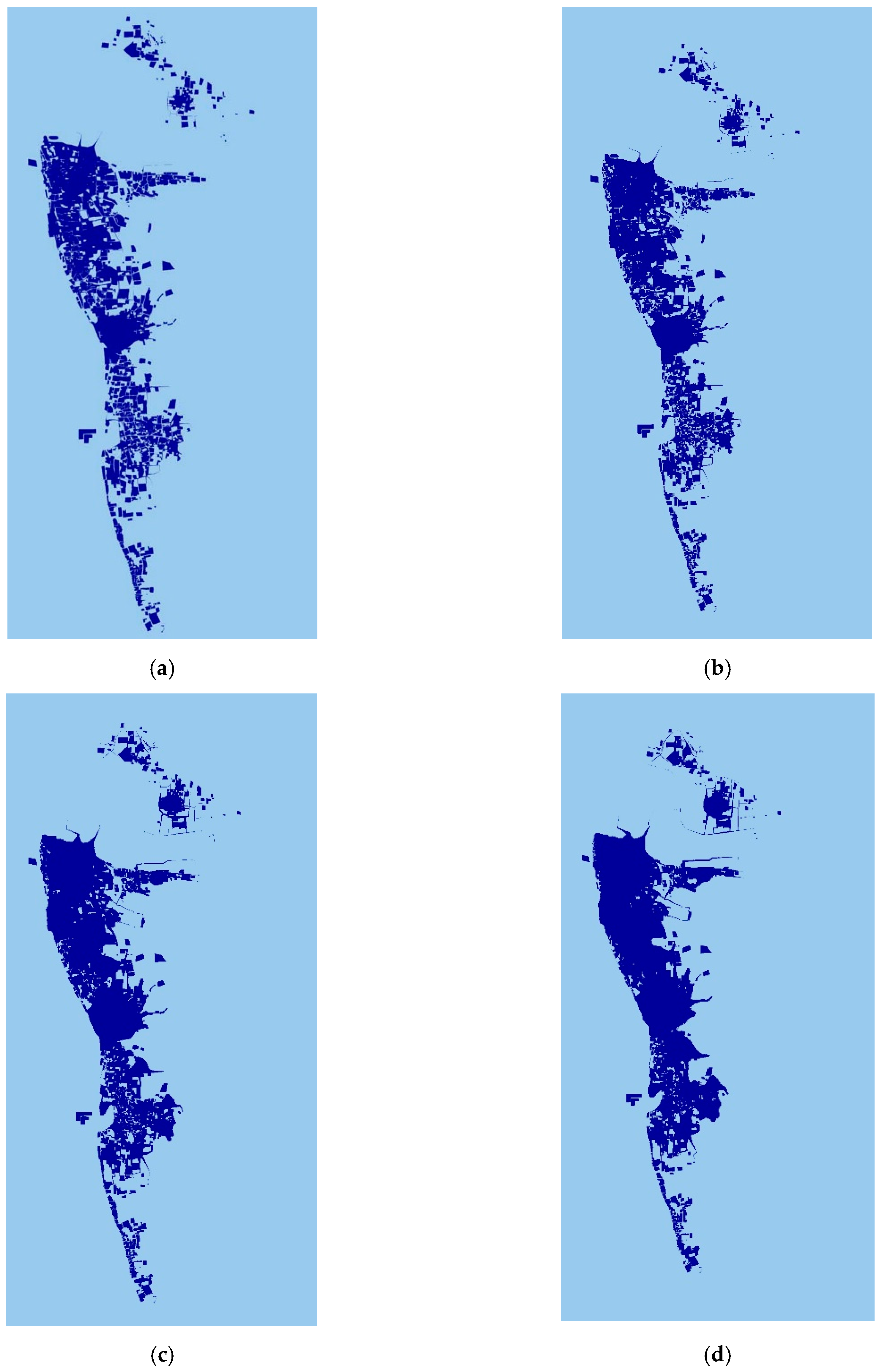
4.2.1. Model Validation
4.2.2. The Future Potential
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Jiao, L.M. Urban land density function: A new method to characterize urban expansion. Landsc. Urban Plan. 2015, 139, 26–39. [Google Scholar] [CrossRef]
- Grekousis, G.; Mountrakis, G. Sustainable development under population pressure: Lessons from developed land consumption in the conterminous U.S. PLoS ONE 2015, 10, e0119675. [Google Scholar] [CrossRef] [PubMed]
- Jiang, B.; Yao, X.B. Geospatial analysis and modeling of urban structure and dynamics: An overview. In Geospatial Analysis and Modelling of Urban Structure and Dynamics; Springer: Berlin, Germany, 2010; Volume 99, pp. 3–11. [Google Scholar]
- Bai, Y.; Feng, M.; Jiang, H.; Wang, J.L.; Zhu, Y.Q.; Liu, Y.Z. Assessing consistency of five global land cover data sets in China. Remote Sens. 2014, 6, 8739–8759. [Google Scholar] [CrossRef]
- World Trade Organization. Participation of Developing Countries in World Trade: Overview of Major Trends and Underlying Factors; WT/COMTD/W/15; World Trade Organization: Geneva, Switzerland, 16 August 1996. [Google Scholar]
- Grekousis, G.; Mountrakis, G.; Kavouras, M. An overview of 21 global and 43 regional land-cover mapping products. Int. J. Remote Sens. 2015, 36, 5309–5335. [Google Scholar] [CrossRef]
- Lagarias, A. Urban sprawl simulation linking macro-scale processes to micro-dynamics through cellular automata, an application in Thessaloniki, Greece. Appl. Geogr. 2012, 34, 146–160. [Google Scholar] [CrossRef]
- Johnson, M.P. Environmental impacts of urban sprawl: A survey of the literature and proposed research agenda. Environ. Plan. A 2001, 33, 717–735. [Google Scholar] [CrossRef]
- Couch, C.; Leontidou, L.; Petschel-Held, G. Urban Sprawl in Europe, Landscapes, Land Use Changes and Policy; Blackwell: Oxford, UK, 2007. [Google Scholar]
- Xiao, J.; Shen, Y.; Ge, J.; Tateishi, R.; Tang, C.; Liang, Y.; Huang, Z. Evaluatingurban expansion and land use change in Shijiazhuang China, by using GIS and remote sensing. Landsc. Urban Plan. 2006, 75, 69–80. [Google Scholar] [CrossRef]
- Clarke, K.C.; Hoppen, S.; Gaydos, L. A self-modifying cellular automaton model of historical urbanization in the San Francisco Bay area. Environ. Plan. B 1997, 24, 247–261. [Google Scholar] [CrossRef]
- Dubovyk, O.; Sliuzas, R.; Flacke, J. Spatio-temporal modelling of informal settlement development in Sancaktepe district, Istanbul, Turkey. ISPRS J. Photogramm. Remote Sens. 2011, 66, 235–246. [Google Scholar] [CrossRef]
- Patino, J.E.; Duque, J.C. A review of regional science applications of satellite remote sensing in urban settings. Comput. Environ. Urban Syst. 2013, 37, 1–17. [Google Scholar] [CrossRef]
- Abd-Allah, M.M.A. Modelling Urban Dynamics Using Geographic Information Systems, Remote Sensing and Urban Growth Models. Ph.D. Thesis, Cairo University, Cairo, Egypt, September 2007. [Google Scholar]
- Osman, T.; Divigalpitiya, P.; Arima, T. Driving factors of urban sprawl in Giza governorate of the Greater Cairo Metropolitan Region using a logistic regression model. Int. J. Urban Sci. 2016, 20, 206–225. [Google Scholar] [CrossRef]
- Osman, T.; Arima, T.; Divigalpitiya, P. Measuring urban sprawl patterns in Greater Cairo Metropolitan Region. J. Indian Soc. Remote Sens. 2016, 44, 287–295. [Google Scholar] [CrossRef]
- Shu, B.; Zhang, H.; Li, Y. Spatiotemporal variation analysis of driving forces of urban land spatial expansion using logistic regression: A case study of port towns in Taicang City, China. Habitat Int. 2014, 43, 181–190. [Google Scholar] [CrossRef]
- Seto, K.C.; Fragkias, M.; Guneralp, B.; Reilly, M.K. A meta-analysis of global urban land expansion. PLoS ONE 2011, 6, e23777. [Google Scholar] [CrossRef] [PubMed]
- Eboli, L.; Forciniti, C.; Mazzulla, G. Exploring land use and transport interaction through structural equation modelling. Procedia Soc. Behav. Sci. 2012, 54, 107–116. [Google Scholar] [CrossRef]
- He, C.Y.; Okada, N.; Zhang, Q.F.; Shi, P.J.; Zhang, J.S. Modeling urban expansion scenarios by coupling cellular automata model and system dynamic model in Beijing, China. Appl. Geogr. 2006, 26, 323–345. [Google Scholar] [CrossRef]
- Grekousis, G.; Manetos, P.; Photis, Y.N. Modeling urban evolution using neural networks, fuzzy logic and GIS: The case of the Athens metropolitan area. Cities 2013, 30, 193–203. [Google Scholar] [CrossRef]
- Menard, S. Applied Logistic Regression Analysis; Sage Publishing: Thousand Oaks, CA, USA, 2002. [Google Scholar]
- Thapa, R.B.; Murayama, Y. Drivers of urban growth in the Kathmandu valley, Nepal: Examining the efficacy of the analytic hierarchy process. Appl. Geogr. 2010, 30, 70–83. [Google Scholar] [CrossRef]
- Dai, F.C.; Lee, C.F.; Zhang, X.H. GIS-based geo-environmental evaluation for urban land-use planning: A case study. Eng. Geol. 2001, 61, 257–271. [Google Scholar] [CrossRef]
- Ozturk, D.; Batuk, F. Implementation of GIS-based multicriteria decision analysis with VB in ArcGIS. Int. J. Inf. Technol. Decision Mak. 2011, 10, 1023–1042. [Google Scholar] [CrossRef]
- Wey, W. Smart growth principles combined with fuzzy AHP and DEA approach to the transit-oriented development (TOD) planning in urban transportation systems. J. Energy Technol. Policy 2013, 3, 251–258. [Google Scholar]
- Han, J.; Hayashi, Y.; Cao, X.; Imura, H. Application of an integrated system dynamics and cellular automata model for urban growth assessment: A case study of Shanghai, China. Landsc. Urban Plan. 2009, 91, 133–141. [Google Scholar] [CrossRef]
- Liu, X.P.; Li, X.; Yeh, A.G.O. Multi-agent systems for simulating spatial decision behaviors and land-use dynamics. Sci. China Ser. D 2006, 49, 1184–1194. [Google Scholar] [CrossRef]
- Liu, W.G.; Seto, K.C. Using the ART-MMAP neural network to model and predict urban growth: A spatiotemporal data mining approach. Environ. Plan. B 2008, 35, 296–317. [Google Scholar] [CrossRef]
- Tu, J.V. Advantages and disadvantages of using artificial neural networks versus logistic regression for predicting medical outcomes. J. Clin. Epidemiol. 1996, 49, 1225–1231. [Google Scholar] [CrossRef]
- Guerriere, M.R.; Detsky, A.S. Neural networks: What are they? Ann. Intern. Med. 1991, 115, 906–907. [Google Scholar] [CrossRef] [PubMed]
- Verhagen, P. Case Studies in Archaeological Predictive Modeling; Amsterdam University Press: Amsterdam, The Netherlands, 2007. [Google Scholar]
- Hu, Z.Y.; Lo, C.P. Modeling urban growth in Atlanta using logistic regression. Comput. Environ. Urban Syst. 2007, 31, 667–688. [Google Scholar] [CrossRef]
- Anselin, L. Spatial Econometrics. Methods and Models; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1988. [Google Scholar]
- Cheng, J.Q.; Masser, I. Urban growth pattern modeling: A case study of Wuhan City, China. Landsc. Urban Plan. 2003, 62, 199–217. [Google Scholar] [CrossRef]
- Achmad, A.; Hasyim, S.; Dahlan, B. Modeling of urban growth in tsunami-prone city using logistic regression: Analysis of Banda Aceh, Indonesia. Appl. Geogr. 2015, 62, 237–246. [Google Scholar] [CrossRef]
- Poelmans, L.; van Rompaey, A. Complexity and performance of urban expansion models. Comput. Environ. Urban Syst. 2010, 34, 17–27. [Google Scholar] [CrossRef]
- Arsanjani, J.J.; Helbich, M.; Kainz, W.; Boloorani, A.D. Integration of logistic regression, Markov chain and cellular automata models to simulate urban expansion. Int. J. Appl. Earth Obs. Geoinform. 2013, 21, 265–275. [Google Scholar] [CrossRef]
- Allen, J.; Lu, K. Modeling and prediction of future urban growth in the Charleston region of South Carolina: A GIS-based integrated approach. Conserv. Ecol. 2003, 8, 2. [Google Scholar]
- Sante, I.; Garcia, A.M.; Miranda, D.; Crecente, R. Cellular automata models for the simulation of real-world urban processes: A review and analysis. Landsc. Urban Plan. 2010, 96, 108–122. [Google Scholar] [CrossRef]
- Sudhira, H.; Ramachandra, T.; Jagadish, K. Urban sprawl: Metrics, dynamics and modelling using GIS. Int. J. Appl. Earth Obs. Geoinform. 2004, 5, 29–39. [Google Scholar] [CrossRef]
- De Noronha Vaz, E.; Nijkamp, P.; Painho, M.; Caetano, M. A multi-scenario forecast of urban change: A study on urban growth in the Algarve. Landsc. Urban Plan. 2012, 104, 201–211. [Google Scholar] [CrossRef]
- Triantakonstantis, D.; Mountrakis, G. Urban growth prediction: A review of computational models and human perceptions. J. Geoinform. Inf. Syst. 2012, 4, 555–587. [Google Scholar] [CrossRef]
- Ebrahimipour, A.; Saadat, M.; Farshchin, A. Prediction of urban growth through cellular automata-Markov chain. Bull. Soc. R. Sci. Liège 2016, 85, 824–839. [Google Scholar]
- Ozturk, D. Urban growth simulation of atakum (Samsun, Turkey) using cellular automata-Markov chain and multi-layer perceptron-markov chain models. Remote Sens. 2015, 7, 5918–5950. [Google Scholar] [CrossRef]
- Kamusoko, C.; Aniya, M.; Adi, B.; Manjoro, M. Rural sustainability under threat in Zimbabwe—Simulation of future land use/cover changes in the Bindura district based on the Markov-cellular automata model. Appl. Geogr. 2009, 29, 435–447. [Google Scholar] [CrossRef]
- Wu, Q.; Li, H.Q.; Wang, R.S.; Paulussen, J.; He, Y.; Wang, M.; Wang, B.H.; Wang, Z. Monitoring and predicting land use change in Beijing using remote sensing and GIS. Landsc. Urban Plan. 2006, 78, 322–333. [Google Scholar] [CrossRef]
- Li, X.Y.; Li, X.W.; Peng, W.L.; Cao, T. Modelling urban sprawl with the optimal integration of Markov chain and spatial neighborhood analysis approach. In Geoscience and Remote Sensing Symposium, Proceedings of the IEEE International, Paris, France, 20–24 June 2004; pp. 2658–2661.
- Eastman, J.; van Fossen, M.; Solarzano, L. Transition potential modeling for land cover change. In GIS, Spatial Analysis, and Modeling; ESRI Press: Redlands, CA, USA, 2005; pp. 357–386. [Google Scholar]
- Falahatkar, S.; Soffianian, A.R.; Khajeddin, S.J.; Ziaee, H.R.; Nadoushan, M.A. Integration of remote sensing data and GIS for prediction of land cover map. Int. J. Geomat. Geosci. 2011, 1, 847. [Google Scholar]
- Jokar Arsanjani, J. Dynamic Land Use/Cover Change Simulation; Springer: Berlin, Germany, 2011. [Google Scholar]
- Lin, L.; Sills, E.; Cheshire, H. Targeting areas for reducing emissions from deforestation and forest degradation (REDD+) projects in tanzania. Glob. Environ. Chang. 2014, 24, 277–286. [Google Scholar] [CrossRef]
- Eastman, J.R. The IDRISI Selva Help; Clark University: Worcester, MA, USA, 2012. [Google Scholar]
- Dzieszko, P. Land-cover modelling using corine land cover data and multi-layer perceptron. Quaest. Geogr. 2014, 33, 5–22. [Google Scholar] [CrossRef]
- Mas, J.F.; Kolb, M.; Paegelow, M. Inductive pattern-based land use/cover change models: A comparison of four software packages. Environ. Model. Softw. 2014, 51, 94–111. [Google Scholar] [CrossRef]
- General Organization of Physical Planning. Detailed Planning for the Village of Abu Rish North—Aswan Governorate; Ministry of Housing, Utilities and Urban Communities: Cairo, Egypt, 2010.
- Abdollah, A.J.; John, N.C.; Tim, R.M.; Thomas, G.V.N.; Joshua, R.L. Satellite-derived Digital Elevation Model (DEM) selection, preparation and correction for hydrodynamic modelling in large, low-gradient and data-sparse catchments. J. Hydrol. 2015, 524, 489–506. [Google Scholar]
- Hamdy, O.; Zhao, S.; Salheen, M.A.; Eid, Y.Y. Analyses the driving forces for urban growth by using IDRISI® Selva models abouelreesh—Aswan as a case study. Int. J. Eng. Technol. 2017, 9, 226–232. [Google Scholar] [CrossRef]
- Taylor, J.R.; Lovell, S.T. Mapping public and private spaces of urban agriculture in Chicago through the analysis of high-resolution aerial images in Google Earth. Landsc. Urban Plan. 2012, 108, 57–70. [Google Scholar]
- Liu, Y.B.; Dai, L.; Xiong, H.H. Simulation of urban expansion patterns by integrating auto-logistic regression, Markov chain and cellular automata models. J. Environ. Plan. Manag. 2015, 58, 1113–1136. [Google Scholar] [CrossRef]
- Arsanjani, J.J.; Kainz, W.; Mousivand, A.J. Tracking dynamic land-use change using spatially explicit Markov Chain based on cellular automata: The case of Tehran. Int. J. Image Data Fusion 2011, 2, 329–345. [Google Scholar] [CrossRef]
- Munshi, T.; Zuidgeest, M.; Brussel, M. Logistic regression and cellular automata-based modelling of retail, commercial and residential development in the city of Ahmedabad, India. Cities 2014, 39, 68–86. [Google Scholar] [CrossRef]
- Mozumder, C.; Tripathi, N.K. Geospatial scenario based modelling of urban and agricultural intrusions in Ramsar wetland Deepor Beel in Northeast India using a multi-layer perceptron neural network. Int. J. Appl. Earth Obs. Geoinform. 2014, 32, 92–104. [Google Scholar] [CrossRef]
- Onate-Valdivieso, F.; Sendra, J.B. Application of GIS and remote sensing techniques in generation of land use scenarios for hydrological modeling. J. Hydrol. 2010, 395, 256–263. [Google Scholar] [CrossRef]
- Gong, W.F.; Yuan, L.; Fan, W.Y.; Stott, P. Analysis and simulation of land use spatial pattern in Harbin prefecture based on trajectories and cellular automata-Markov modelling. Inter. J. Appl.Earth Obs. Geoinform. 2015, 34, 207–216. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Cramer’s V | Coefficient |
|---|---|---|
| Distance to Main Roads | 0.5588 | −0.53 |
| Distance to Regional Road | 0.2732 | 0.74 |
| Distance to Railway Station | 0.3629 | −0.25 |
| Proximity to Old Urban Area | 0.4018 | 0.12 |
| Proximity to Nearby City (N. Aswan City) | 0.3467 | −0.98 |
| Distance to Railway Foot Cross | 0.3045 | −0.49 |
| Distance to Services | 0.4930 | −0.62 |
| Slope | 0.0194 | 0.001 |
| Elevation | 0.3536 | 0.012 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hamdy, O.; Zhao, S.; Osman, T.; Salheen, M.A.; Eid, Y.Y. Applying a Hybrid Model of Markov Chain and Logistic Regression to Identify Future Urban Sprawl in Abouelreesh, Aswan: A Case Study. Geosciences 2016, 6, 43. https://doi.org/10.3390/geosciences6040043
Hamdy O, Zhao S, Osman T, Salheen MA, Eid YY. Applying a Hybrid Model of Markov Chain and Logistic Regression to Identify Future Urban Sprawl in Abouelreesh, Aswan: A Case Study. Geosciences. 2016; 6(4):43. https://doi.org/10.3390/geosciences6040043
Chicago/Turabian StyleHamdy, Omar, Shichen Zhao, Taher Osman, Mohamed A. Salheen, and Youhansen Y. Eid. 2016. "Applying a Hybrid Model of Markov Chain and Logistic Regression to Identify Future Urban Sprawl in Abouelreesh, Aswan: A Case Study" Geosciences 6, no. 4: 43. https://doi.org/10.3390/geosciences6040043
APA StyleHamdy, O., Zhao, S., Osman, T., Salheen, M. A., & Eid, Y. Y. (2016). Applying a Hybrid Model of Markov Chain and Logistic Regression to Identify Future Urban Sprawl in Abouelreesh, Aswan: A Case Study. Geosciences, 6(4), 43. https://doi.org/10.3390/geosciences6040043