Overtopping of Coastal Structures by Tsunami Waves


 , and
, and
Abstract
:1. Introduction
2. Experimental Program
3. Results
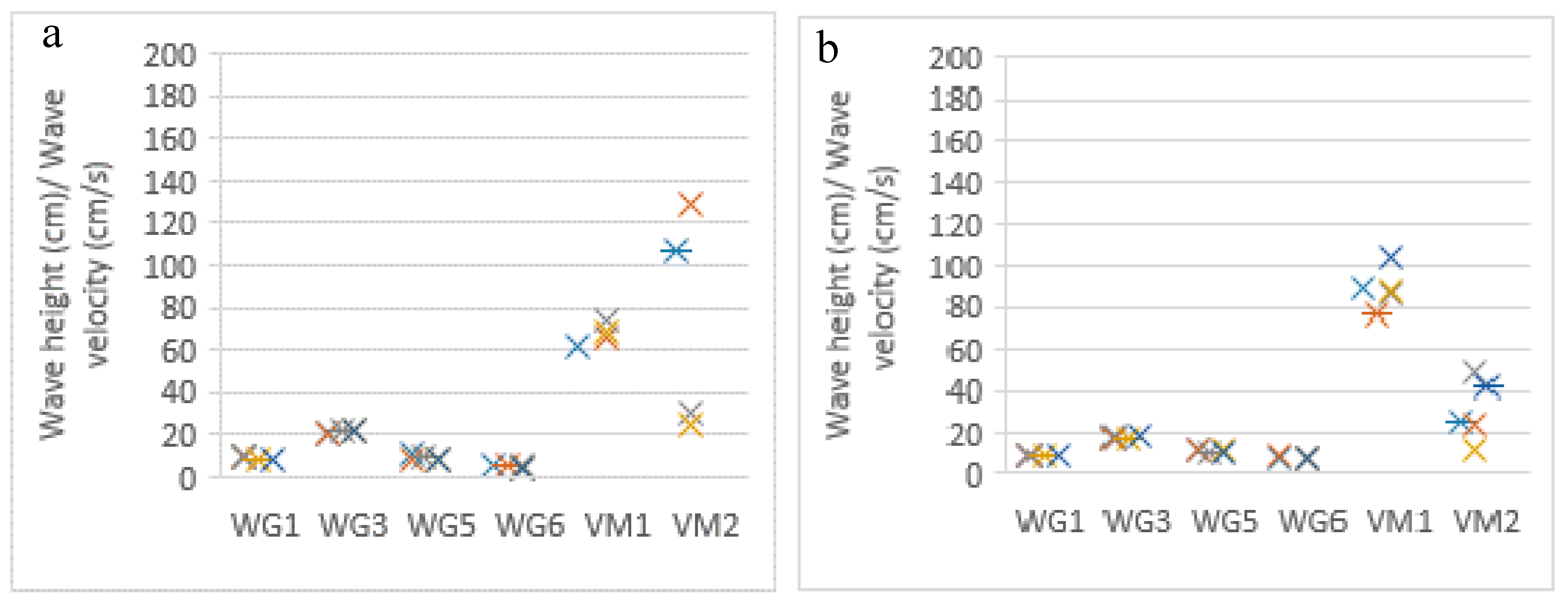
3.1. Experiment Repeatability
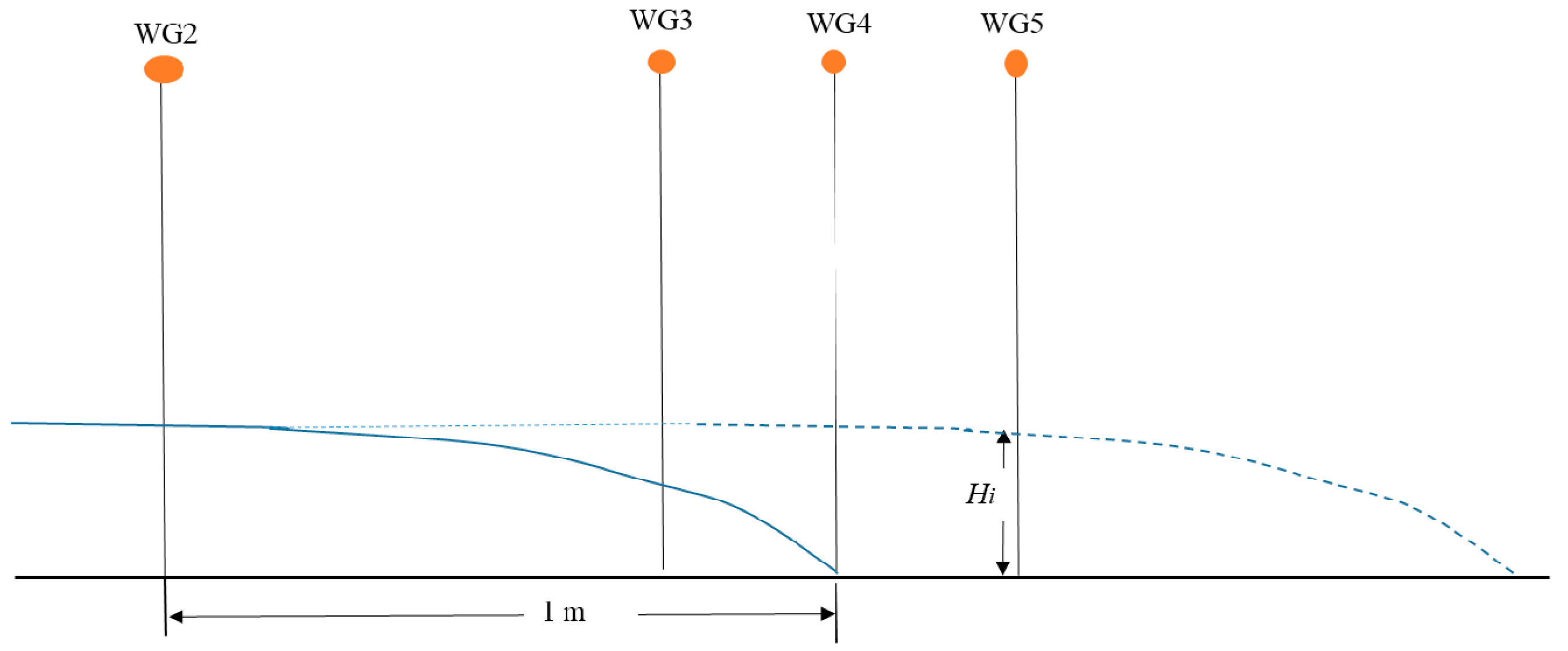
3.2. Dam Break Wave Profile
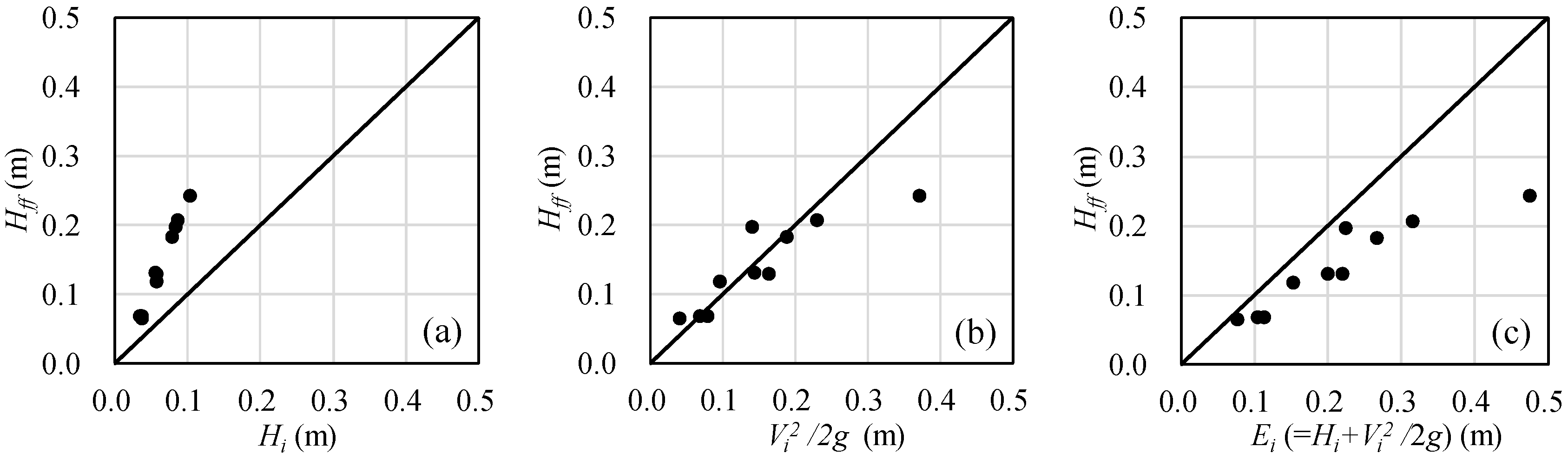
3.3. Inundation Height after the Structure
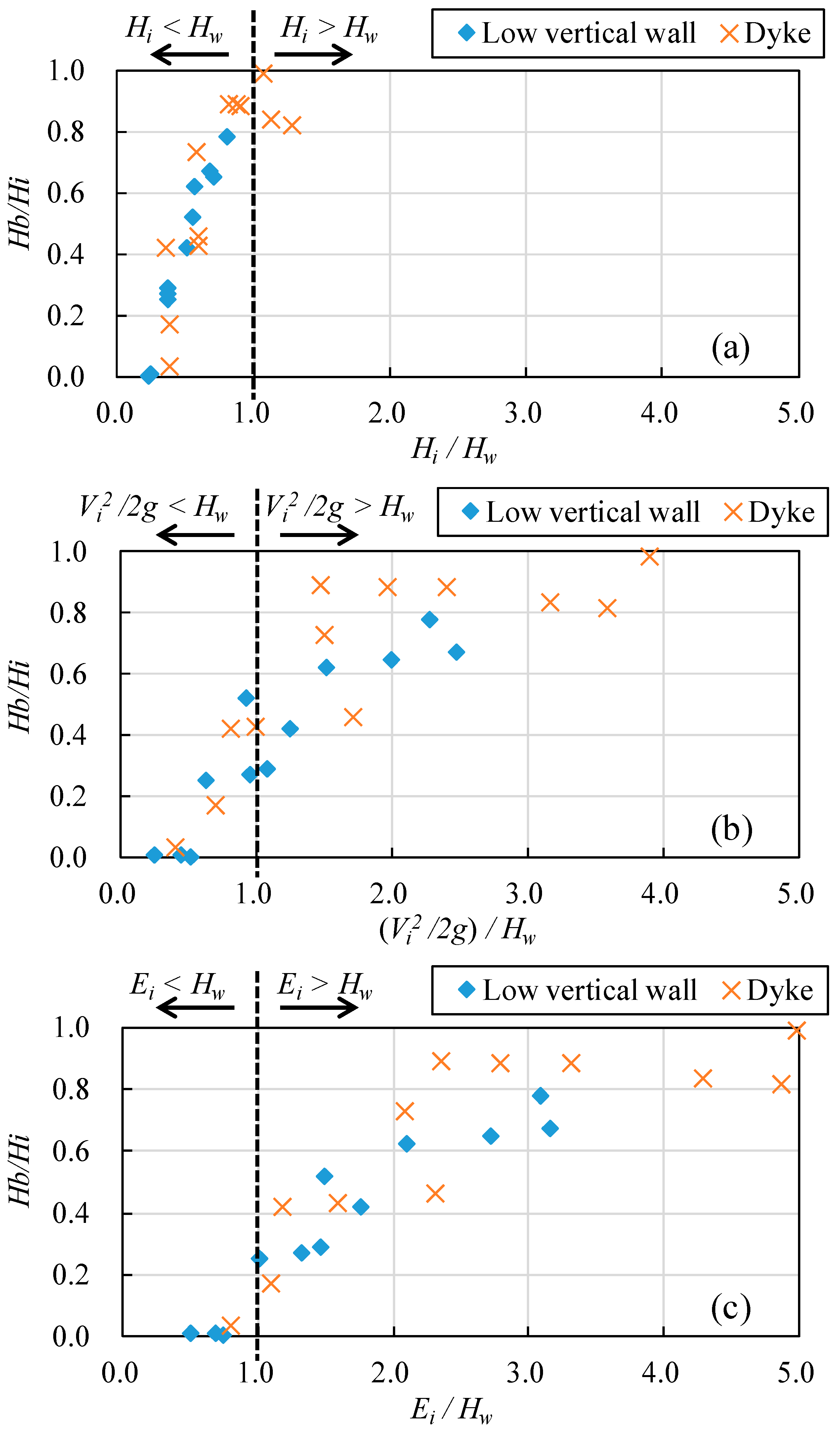
4. Engineering Implications and Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Mori, N.; Takahashi, T. The 2011 Tohoku Earthquake Tsunami Joint Survey Group (2012). Nationwide post event survey and analysis of the 2011 Tohoku Earthquake Tsunami. Coast. Eng. J. 2012, 54, 1250001. [Google Scholar] [CrossRef]
- Mikami, T.; Shibayama, T.; Esteban, M.; Matsumaru, R. Field survey of the 2011 Tohoku Earthquake and tsunami in Miyagi and Fukushima Prefectures. Coast. Eng. J. 2012, 54, 1250011. [Google Scholar] [CrossRef]
- Ranghieri, F.; Ishiwatari, M. Learning from Megadisasters: Lessons from the Great East Japan Earthquake; World Bank Publications: Washington, DC, USA, 2008; Available online: https://openknowledge.worldbank.org/bitstream/handle/10986/18864/9781464801532.pdf?sequence=1 (accessed on 20 November 2017).
- Shibayama, T.; Esteban, M.; Nistor, I.; Takagi, H.; Danh Thao, N.; Matsumaru, R.; Mikami, T.; Aranguiz, R.; Jayaratne, R.; Ohira, K. Classification of tsunami and evacuation areas. J. Nat. Hazards 2013, 67, 365–386. [Google Scholar] [CrossRef]
- Tomita, T.; Yeom, G.S.; Oyugai, M.; Niwa, T. Breakwater effects on tsunami inundation reduction in the 2011 off the Pacific coast of Tohoku Earthquake. J. Japan Soc. Civ. Eng. Ser. B2 2012, 68, 156–160. Available online: https://www.jstage.jst.go.jp/article/kaigan/68/2/68_I_156/_article (accessed on 20 November 2017). [CrossRef]
- Kato, F.; Suwa, Y.; Watanabe, K.; Hatogai, S. Mechanism of coastal dike failure induced by the Great East Japan Earthquake Tsunami. In Proceedings of the 33nd International Conference on Coastal Engineering, Santander, Spain, 1–6 July 2012. [Google Scholar]
- Esteban, M.; Jayaratne, R.; Mikami, T.; Morikubo, I.; Shibayama, T.; Danh Thao, N.; Ohira, K.; Ohtani, A.; Mizuno, Y.; Kinoshita, M.; et al. Stability of breakwater armour units against tsunami attack. J. Waterw. Ports Coast. Ocean Eng. 2014, 140, 188–198. [Google Scholar] [CrossRef]
- Jayaratne, M.P.R.; Premaratne, B.; Adewale, A.; Mikami, T.; Matsuba, S.; Shibayama, T.; Esteban, M.; Nistor, I. Failure mechanisms and local scour at coastal structures induced by Tsunami. Coast. Eng. J. 2016, 58, 1640017. [Google Scholar] [CrossRef]
- Goda, Y. Random Seas and Design of Maritime Structures; University of Tokyo Press: Tokyo, Japan, 1985; ISBN 4130681109. [Google Scholar]
- Tanimoto, K.; Furakawa, K.; Nakamura, H. Hydraulic resistant force and sliding distance model at sliding of a vertical caisson. In Proceedings of the International Conference on Coastal Engineering, Orlando, FL, USA, 2–6 September 1996; pp. 846–850. (In Japanese). [Google Scholar]
- Esteban, M.; Takagi, H.; Shibayama, T. Improvement in calculation of resistance force on caisson sliding due to tilting. Coast. Eng. J. 2007, 49, 417–441. [Google Scholar] [CrossRef]
- Tanimoto, L.; Tsuruya, K.; Nakano, S. Tsunami force of Nihonkai-Chubu Earthquake in 1983 and cause of revetment damage. In Proceedings of the 31st Japanese Conference on Coastal Engineering, Tokyo, Japan, 13–14 April 1984. [Google Scholar]
- Ikeno, M.; Mori, N.; Tanaka, H. Experimental study on tsunami force and impulsive force by a drifter under breaking bore like Tsunamis. Coast. Eng. J. 2001, 48, 846–850. [Google Scholar]
- Ikeno, M.; Tanaka, H. Experimental study on impulse force of drift body and tsunami running up to land. Ann. J. Coast. Eng. 2003, 50, 721–725. [Google Scholar]
- Mizutani, S.; Imamura, F. Hydraulic experimental study on wave force of a bore acting on a structure. Coast. Eng. J. 2000, 47, 946–950. [Google Scholar]
- Esteban, M.; Danh Thao, N.; Takagi, H.; Shibayama, T. Laboratory experiments on the sliding failure of a caisson breakwater subjected to solitary wave attack. In Proceedings of the Eighth ISOPE Pacific/Asia Offshore Mechanics Symposium, Bangkok, Thailand, 10–14 November 2008. [Google Scholar]
- Esteban, M.; Danh Thao, N.; Takagi, H.; Shibayama, T. Pressure exerted by a solitary wave on the rubble mound foundation of an armoured caisson breakwater. In Proceedings of the 19th International Offshore and Polar Engineering Conference, Osaka, Japan, 21–26 June 2009. [Google Scholar]
- Esteban, M.; Morikubo, I.; Shibayama, T.; Aranguiz Muñoz, R.; Mikami, T.; Danh Thao, N.; Ohira, K.; Ohtani, A. Stability of rubble mound breakwaters against solitary waves. In Proceedings of the 33nd International Conference on Coastal Engineering, Santander, Spain, 1–6 July 2012. [Google Scholar]
- Madsen, P.A.; Furhman, D.R.; Schaffer, H.A. On the solitary wave paradigm for tsunamis. J. Geophys. Res. 2008, 113, C12012. [Google Scholar] [CrossRef]
- Goseberg, N.; Wurpts, A.; Schlurmann, T. Laboratory-scale generation of tsunami and long waves. Coast. Eng. 2013, 79, 57–74. [Google Scholar] [CrossRef]
- Sakakiyama, T. Stability of armour units of rubble mound breakwater against Tsunamis. In Proceedings of the 33rd International Conference on Coastal Engineering, Santander, Spain, 30 June–5 July 2012. [Google Scholar]
- Hanzawa, M.; Matsumoto, A.; Tanaka, H. Stability of Wave-dissipating concrete blocks of detached breakwaters against Tsunami. In Proceedings of the 33rd International Conference on Coastal Engineering, Santander, Spain, 1–6 July 2012. [Google Scholar]
- Mikami, T.; Matsuba, S.; Shibayama, T. Flow Geometry of Overflowing Tsunamis Around Coastal Dykes. In Proceedings of the Coastal Engineering Proceedings 2014, Seoul, Korea, 15–20 June 2014; Available online: https://journals.tdl.org/icce/index.php/icce/article/view/7615/pdf_839 (accessed on 1 June 2016).
- Nandasena, N.A.K.; Sasaki, Y.; Tanaka, N. Modelling field observations of the 2011 Great East Japan tsunami: Efficacy of artificial and natural structures on tsunami mitigation. Coast. Eng. 2012, 67, 1–13. [Google Scholar] [CrossRef]
- Stansby, P.; Xu, R.; Rogers, B.D.; Hunt-Raby, A.; Borthwick, A.G.L.; Taylor, P.H. Modelling overtopping of a sea defence by shallow-water Boussinesq, VOF and SPH methods. In Flood Risk Management: Research and Practice; Samuels, P., Huntington, S., Allsop, W., Harrop, J., Eds.; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Hunt-Raby, A.; Borthwick, A.G.L.; Stansby, P.K.; Taylor, P.H. Experimental measurement of focused wave group and solitary wave overtopping. J. Hydraul. Res. 2011, 49, 450–464. [Google Scholar] [CrossRef] [Green Version]
- Chock, G.; Robertson, I.; Kriebel, D.; Nistor, I.; Francis, M.; Cox, D.; Yim, S. The Tohoku, Japan, Tsunami of March 11, 2011: Effects on Structures; Special Earthquake Report (2011) Learning from Earthquakes; Earthquake Engineering Research Institute: Oakland, CA, USA, September 2011. [Google Scholar]
- Supparsi, A.; Koshimura, S.; Imai, K.; Mas, E.; Gokon, H.; Muhari, A.; Imamura, F. Damage characteristic and field survey of the 2011 Great East Japan Tsunami in Miyagi Prefecture. Coast. Eng. J. 2012, 54, 1250005. [Google Scholar]
- Omira, R.; Baptista, M.A.; Leone, F.; Matias, L.; Mellas, S.; Zourarah, B.; Miranda, J.M.; Carrilho, F.; Cherel, J.P. Performance of coastal sea-defence infrastructure at El Jadida (Marocco) against tsunami threat: Lessons learned from the Japanese 11 March tsunami. Nat. Hazards Earth Syst. Sci. 2013, 13, 1779–1794. [Google Scholar] [CrossRef]
- Latcharote, P.; Suppasri, A.; Hasegawa, N.; Takagi, H.; Imamura, F. Effect of breakwaters on reduction of fatality ratio during the 2011 Great East Japan Earthquake and Tsunami. J. Jpn. Soc. Civ. Eng. Ser. B2 2016, 72, 1591–1596. [Google Scholar] [CrossRef]
- Cyranoski, D. After the deluge: Japan is rebuilding its coastal cities to protect people from the biggest tsunamis. Nature 2012, 483, 141–143. [Google Scholar] [CrossRef] [PubMed]
- Takagi, H.; Bricker, J. Assessment of the effectiveness of general breakwaters in reducing tsunami inundation in Ishinomaki. Coast. Eng. J. 2014, 56, 21. [Google Scholar] [CrossRef]
- Okumura, N.; Jonkman, S.; Esteban, M.; Hofland, B.; Shibayama, T. A method for Tsunami risk assessment—A case study for Kamakura, Japan. Nat. Hazards 2017, 88, 1451–1472. [Google Scholar] [CrossRef]
- San Carlos-Arce, R.; Onuki, M.; Esteban, M.; Shibayama, T. Risk awareness and intended tsunami evacuation behaviour of international tourists in Kamakura City, Japan. Int. J. Disaster Risk Reduct. 2017, 23, 178–192. [Google Scholar] [CrossRef]
- Takabatake, T.; Shibayama, T.; Esteban, M.; Ishii, H.; Hamano, G. Simulated Tsunami evacuation behaviour of local residents and visitors in Kamakura, Japan. Int. J. Disaster Risk Reduct. 2017, 23, 1–14. [Google Scholar] [CrossRef]
- Jonkman, S.N.; Penning-Rowsell, E. Human instability in flood flows. J. Am. Water Resour. Assoc. 2008, 44, 1208–1218. [Google Scholar] [CrossRef]
- Dressler, R.F. Comparison of theories and experiments for hydraulic dam-break wave. Int. Assoc. Sci. Hydrol. 1954, 38, 319–328. [Google Scholar]
- Estrade, J.; Martinot, A. Ecoulment consecutif a la suppression dun barrage dans un canal horizontal de section rectangulaire. C. R. Hebd. Seances L’Acad. Sci. 1964, 259, 4502. (In French) [Google Scholar]
- Chanson, H. Analytical solutions of laminar and turbulent dam break wave. In Proceedings of the International Conference on Fluvial Hydraulics, Lisbon, Portugal, 6–8 September 2006; Ferreira, R.M.L., Alves, E.C.T.L., Leal, J.G.A.B., Cardoso, A.H., Eds.; Taylor & Francis Groupe: London, UK, 2006; Volume 1, pp. 465–474, ISBN 0-415-40815-6. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure Type | No Structure | High Vertical Wall (Non-Overtopped) | Low Vertical Wall | Dyke | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| d (cm) | h (cm) | Hi (cm) | Vi (m/s) | Hf0 (cm) | Hf (cm) | Ho (cm) | Hb (cm) | Hf (cm) | Ho (cm) | Hb (cm) | |
| WG5 | WG2-4 | WG3 | WG4 | WG3 | WG5 | WG6 | WG3 | WG5 | WG6 | ||
| 30 | 0 | 3.42 | 1.24 | 8.24 | 6.8 | 8.57 | 0 | 0 | 8.06 | 0.41 | 1.43 |
| 10 | 3.67 | 1.15 | 7.79 | 6.81 | 7.15 | 0 | 0.02 | 8.57 | 0 | 0.61 | |
| 20 | 3.73 | 0.88 | 8.2 | 6.52 | 7.49 | 0 | 0.02 | 8.7 | 0.04 | 0.12 | |
| 40 | 0 | 5.49 | 1.68 | 16.15 | 13.1 | 15.21 | 0.9 | 1.48 | 13.73 | 5.55 | 4 |
| 10 | 5.64 | 1.37 | 14.59 | 11.7 | 14.46 | 0.21 | 1.41 | 13.39 | 4.41 | 2.4 | |
| 20 | 5.64 | 1.79 | 15.41 | 12.9 | 14.85 | 0.57 | 1.62 | 13.58 | 3.89 | 2.58 | |
| 50 | 0 | 8.59 | 2.12 | 24.3 | 20.6 | 21.04 | 10.76 | 5.31 | 17.61 | 11.35 | 7.56 |
| 10 | 7.79 | 1.92 | 22.38 | 18.2 | 19.28 | 4.92 | 3.26 | 17.11 | 9.22 | 6.88 | |
| 20 | 8.32 | 1.66 | 21.41 | 19.7 | 20.16 | 5.31 | 4.3 | 17.97 | 10.45 | 7.38 | |
| 60 | 0 | 12.17 | 2.59 | 33.69 | >30 | 27.55 | 16.33 | 9.45 | 20.32 | 16 | 9.92 |
| 10 | 10.74 | 2.43 | 28.61 | >30 | 24.35 | 11.11 | 6.95 | 20.36 | 13.16 | 8.95 | |
| 20 | 10.27 | 2.7 | 28.63 | 24.2 | 24.17 | 12.38 | 6.88 | 20.89 | 13.48 | 10.12 | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Esteban, M.; Glasbergen, T.; Takabatake, T.; Hofland, B.; Nishizaki, S.; Nishida, Y.; Stolle, J.; Nistor, I.; Bricker, J.; Takagi, H.; et al. Overtopping of Coastal Structures by Tsunami Waves. Geosciences 2017, 7, 121. https://doi.org/10.3390/geosciences7040121
Esteban M, Glasbergen T, Takabatake T, Hofland B, Nishizaki S, Nishida Y, Stolle J, Nistor I, Bricker J, Takagi H, et al. Overtopping of Coastal Structures by Tsunami Waves. Geosciences. 2017; 7(4):121. https://doi.org/10.3390/geosciences7040121
Chicago/Turabian StyleEsteban, Miguel, Toni Glasbergen, Tomoyuki Takabatake, Bas Hofland, Shinsaku Nishizaki, Yuta Nishida, Jacob Stolle, Ioan Nistor, Jeremy Bricker, Hiroshi Takagi, and et al. 2017. "Overtopping of Coastal Structures by Tsunami Waves" Geosciences 7, no. 4: 121. https://doi.org/10.3390/geosciences7040121
APA StyleEsteban, M., Glasbergen, T., Takabatake, T., Hofland, B., Nishizaki, S., Nishida, Y., Stolle, J., Nistor, I., Bricker, J., Takagi, H., & Shibayama, T. (2017). Overtopping of Coastal Structures by Tsunami Waves. Geosciences, 7(4), 121. https://doi.org/10.3390/geosciences7040121