GRACETOOLS—GRACE Gravity Field Recovery Tools

Abstract
:1. Introduction
2. Mathematical Models
2.1. Equations of Motion and Observation Models
2.2. The State Transition Matrix
2.3. The Normal Equations
2.4. Partitioned Normal Equations
- Local: Parameters that are valid for only one arc, such as initial position and velocity for each day
- Global : Parameters that are valid across all arcs, such as monthly spherical harmonics coefficients
3. Matrix Form
3.1. Matrix A: State Partials
3.2. Matrix : State Transition Matrix
3.3. Matrix : Observation Partials
4. GRACETOOLS Batch Processor Algorithm
- (1)
- Initialize at
- Read the initial state vector, i.e. position and velocity of two GRACE satellites (). They are the first rows from two GPS navigation level 1B (GNV1B) daily files; GRACE level 1B orbits are given in an Earth-fixed frame and they need to be transformed to the inertial frame.
- Read the range rate observation from the K-band ranging level 1B (KBR1B) daily files.
- Read a-priori gravity model in terms of spherical harmonic coefficients ().
- Set
- The a-priori deviation values for state and spherical harmonics coefficients and their associated error covariance matrix are:
- (2)
- Supply the numerical integrator with the following vector at each time pointThe first four elements provide the reference orbit , and the last one yield the elements of . The reference orbit is used to evaluate , which is needed to evaluate .
- (3)
- Accumulate current observation
- Calculate the observation deviation from the KBR1B data
- Partition into for initial state and for spherical harmonics coefficients.
- Accumulate
- (4)
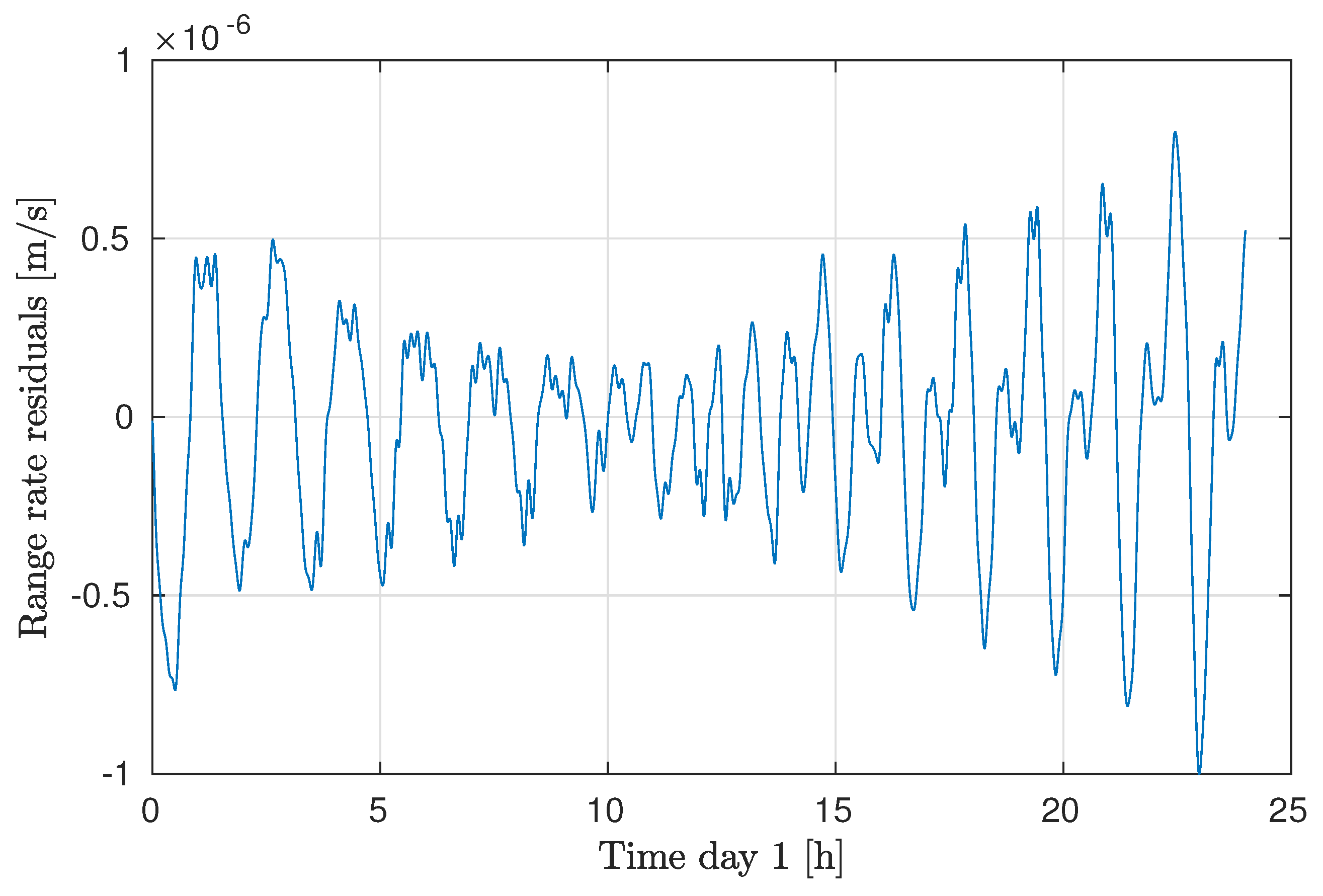
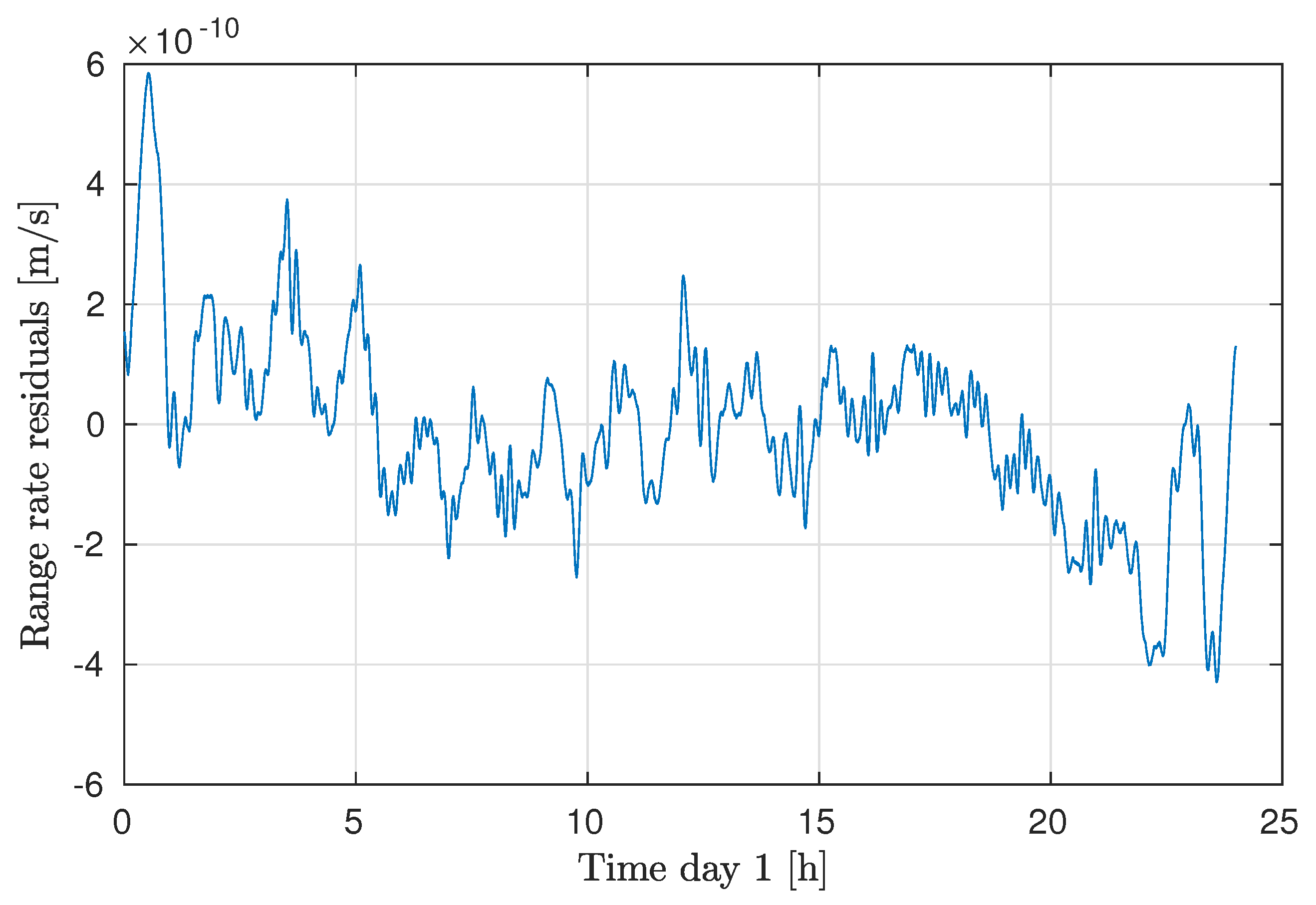
- Repeat for each day and save for each day. Save ,, for each day, to plot daily post fit range rate residuals.
- (5)
- Solve normal equationsFirst, for global parameters, spherical harmonics coefficientsand then for local daily parameters, initial state of the two satellites for each day
- (6)
- Estimate postfit range rate residuals for each day
- (7)
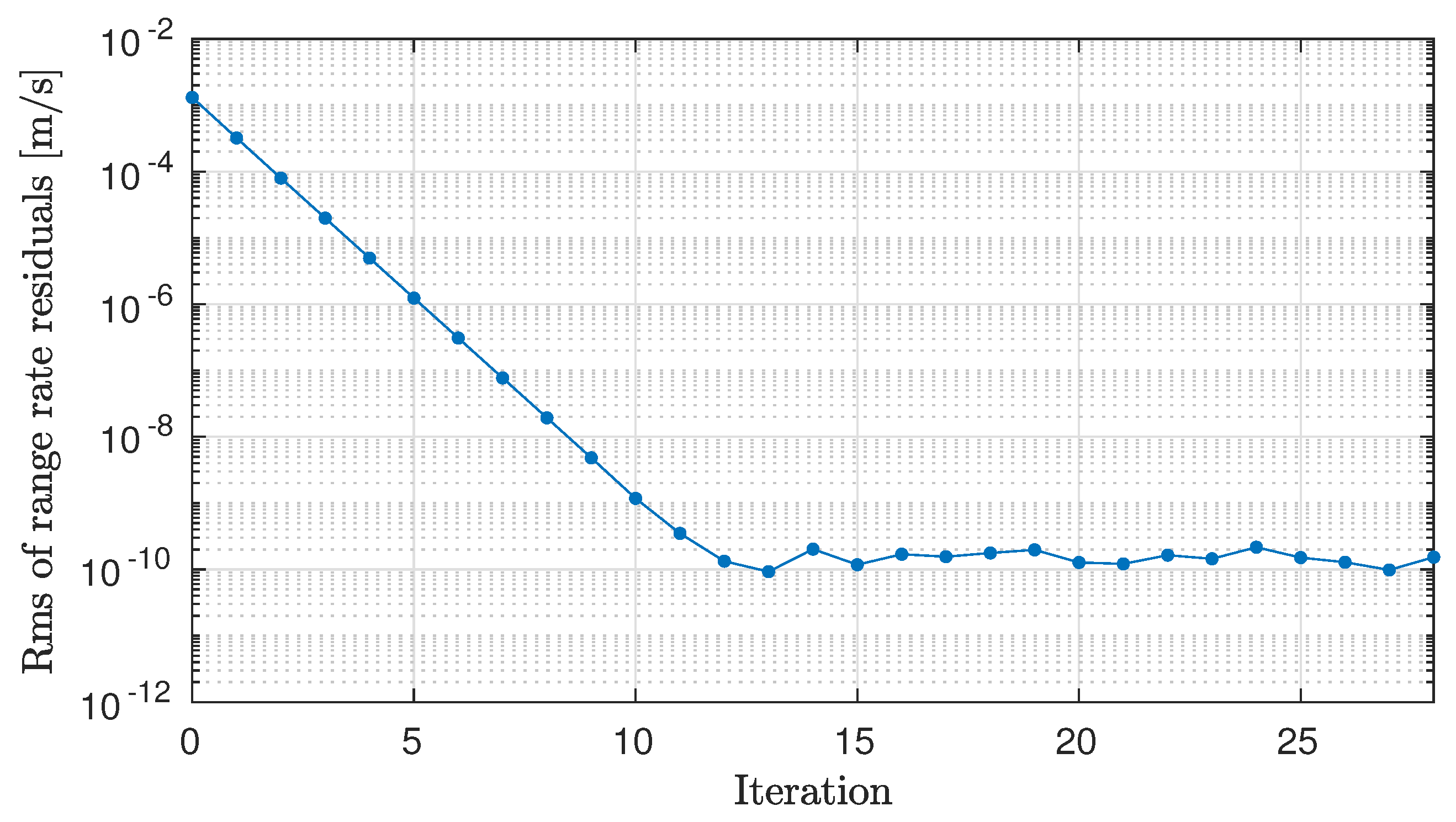
- Update the initial state of both satellites for each arc (or day here)and gravity field coefficients:Repeat this until the least squares estimation is converged or it is below an accepted error tolerance.
5. Evaluation with Simulated Data
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ASD | Amplitude Spectral Density |
| GRACE | Gravity Recovery and Climate Experiment |
| GRACETOOLS | GRACE gravity field recovery tools |
| GNV1B | GPS navigation level 1B |
| KBR1B | K-band ranging level 1B |
Appendix A. About GRACETOOLS
- We provide three different fixed step numerical integration schemes. The recommended one is the Adams–Bashforth–Moultion (ABM) predictor–corrector multistep integrator. It can be used with different orders, but we suggest using an order between 6 and 10 for a step size of five seconds, which is the GRACE L1B data sampling. The ABM integrator is implemented with one corrector step, thus it needs two evaluations of the “deriv” function. Similar to any multistep integrator, it needs to be initialized with an single step integrator or a sufficient amount of initial values. In this implementation, the ABM method is automatically initialized by an 8th order Runge–Kutta (RK) method (Dormand–Prince 87), which is used to integrate the first required steps. The RK method can also be use as main integrator, but it needs 13 evaluations of the “deriv” function for each integration step, and thus is quite slow.
- The code organization is designed to be highly modular. Every set of partials (e.g., A and matrices) is represented by a separate function or chain of functions. The function “grtenpshs” is used to calculate “acceleration along the orbit” to integrate equation of motion. To calculate partials and in Matrix A, the function “grtenpshs” is used. Similarly, partials and in Matrix A are calculated by the function “llpartialgradV”. Our goal is to produce a code which can be read without difficulties, which makes easier future modifications or forks.
- MATLAB parallel for-Loops (parfor) is used for calculation over arcs (days here). This code can be easily modified to run on the user’s local parallel computations clusters.
- Since maintainability is one of our main goals, the documentation is also a critical factor. We document every function similar to the MATLAB documentation guide line.
References
- Tapley, B.D.; Bettadpur, S.; Watkins, M.; Reigber, C. The gravity recovery and climate experiment: Mission overview and early results. Geophys. Res. Lett. 2004, 31, L09607. [Google Scholar] [CrossRef]
- Rummel, R.; van Gelderen, M.; Koop, R.; Schrama, E.; Sansó, F.; Brovelli, M.; Miggliaccio, F.; Sacerdote, F. Spherical Harmonic Analysis of Satellite Gradiometry; Publications on Geodesy, New Series 39; Netherlands Geodetic Commission: Delft, The Netherlands, 1998. [Google Scholar]
- Naeimi, M.; Flury, J. Global Gravity Field Modeling from Satellite-to-Satellite Tracking Data. In Lecture Notes in Earth System Sciences; Springer: Berlin, Germany, 2017. [Google Scholar]
- Reigber, C. Gravity field recovery from satellite tracking data. In Theory of Satellite Geodesy and Gravity Field Determination; Springer: Berlin/Heidelberg, Germany, 1989; pp. 197–234. [Google Scholar]
- Jekeli, C. The determination of gravitational potential differences from satellite-to-satellite tracking. Celest. Mech. Dyn. Astron. 1999, 75, 85. [Google Scholar] [CrossRef]
- Han, S.-C.; Shum, C.K.; Jekeli, C. Precise estimation of in situ geopotential differences from GRACE low-low satellite-to-satellite tracking and accelerometer data. J. Geophys. Res. 2006, 111, B04411. [Google Scholar] [CrossRef]
- Beutler, G.; Jäggi, A.; Mervart, L.; Meyer, U. The celestial mechanics approach: Theoretical foundations. J. Geod. 2010, 84, 605–624. [Google Scholar] [CrossRef]
- Jäggi, A. Pseudo-Stochastic Orbit Modeling of Low Earth Satellites Using the Global Positioning System. Ph.D. Thesis, Astronomical Institute, University of Bern, Bern, Switzerland, 2006. [Google Scholar]
- Liu, X. Global Gravity Field Recovery From Satellite-to-Satellite Tracking Data With the Acceleration Approach. Ph.D. Thesis, Nederlandse Commissie voor Geodesie Netherlands Geodetic Commission, Delft, The Netherlands, 2008. [Google Scholar]
- Mayer-Gürr, T. Gravitationsfeldbestimmung aus der Analyse kurzer Bahnbögen am Beispiel der Satellitenmissionen CHAMP und GRACE. Ph.D. Thesis, Universitäts-und Landesbibliothek Bonn, Bonn, Germany, 2006. [Google Scholar]
- Keller, W.; Sharifi, M. Satellite gradiometry using a satellite pair. J. Geod. 2005, 78, 544. [Google Scholar] [CrossRef]
- Sakumura, C.; Bettadpur, S.; Bruinsma, S. Ensemble prediction and intercomparison analysis of GRACE time-variable gravity field models. Geophys. Res. Lett. 2014, 41, 1389–1397. [Google Scholar] [CrossRef] [Green Version]
- Gunter, B.C. Parallel Least Squares Analysis of Simulated GRACE Data. Master’s Thesis, The University of Texas at Austin, Austin, TX, USA, 2000. [Google Scholar]
- McCullough, C.M. Gravity Field Estimation for Next Generation Satellite Missions. Ph.D. Thesis, The University of Texas at Austin, Austin, TX, USA, 2017. [Google Scholar]
- Tapley, B.D.; Schutz, B.E.; Born, G.H. Statistical Orbit Determination; Elsevier Academic Press: Amsterdam, The Netherlands, 2004. [Google Scholar]
- Mayer-Gürr, T.; Behzadpour, S.; Ellmer, M.; Kvas, A.; Klinger, B.; Zehentner, N. ITSG-Grace2016—Monthly and Daily Gravity Field Solutions from GRACE. GFZ Data Services. 2016. Available online: http://doi.org/10.5880/icgem.2016.007 (accessed on 11 September 2018).
- Ries, J.; Bettadpur, S.; Eanes, R.; Kang, Z.; Ko, U.; McCullough, C.; Nagel, P.; Pie, N.; Poole, S.; Richter, T.; et al. Development and Evaluation of the Global Gravity Model GGM05-CSR-16-02; Technical Report for Center for Space Research; The University of Texas: Austin, TX, USA, 2016. [Google Scholar]
- Lemoine, F.G.; Kenyon, S.C.; Factor, J.K.; Trimmer, R.G.; Pavlis, N.K.; Chinn, D.S.; Cox, C.M.; Klosko, S.M.; Luthcke, S.B.; Torrence, M.H.; et al. The Development of the Joint NASA GSFC and the National Imagery and Mapping Agency (NIMA) Geopotential Model EGM96; NASA: Washington, DC, USA, 1998.
- Chung, L.R. Orbit Determination Methods for Deep Space Drag-Free Controlled Laser Interferometry Missions. Master’s Thesis, University of Maryland, College Park, ML, USA, 2006. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Timewise | Observations | Spacewise | Observations |
|---|---|---|---|
| Classical approach | , | Energy balance approach | |
| e.g., [1,4] | e.g., [5,6] | ||
| Celestial mechanics approach | , | Acceleration approach | |
| e.g., [7,8] | e.g., [9] | ||
| Short arc approach | , | Line of Sight Gradiometry | |
| e.g., [10] | e.g., [11] |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Darbeheshti, N.; Wöske, F.; Weigelt, M.; Mccullough, C.; Wu, H. GRACETOOLS—GRACE Gravity Field Recovery Tools. Geosciences 2018, 8, 350. https://doi.org/10.3390/geosciences8090350
Darbeheshti N, Wöske F, Weigelt M, Mccullough C, Wu H. GRACETOOLS—GRACE Gravity Field Recovery Tools. Geosciences. 2018; 8(9):350. https://doi.org/10.3390/geosciences8090350
Chicago/Turabian StyleDarbeheshti, Neda, Florian Wöske, Matthias Weigelt, Christopher Mccullough, and Hu Wu. 2018. "GRACETOOLS—GRACE Gravity Field Recovery Tools" Geosciences 8, no. 9: 350. https://doi.org/10.3390/geosciences8090350
APA StyleDarbeheshti, N., Wöske, F., Weigelt, M., Mccullough, C., & Wu, H. (2018). GRACETOOLS—GRACE Gravity Field Recovery Tools. Geosciences, 8(9), 350. https://doi.org/10.3390/geosciences8090350