Data Acquisition Methodologies Utilizing Ground Penetrating Radar for Cassava (Manihot esculenta Crantz) Root Architecture

Abstract
:1. Introduction
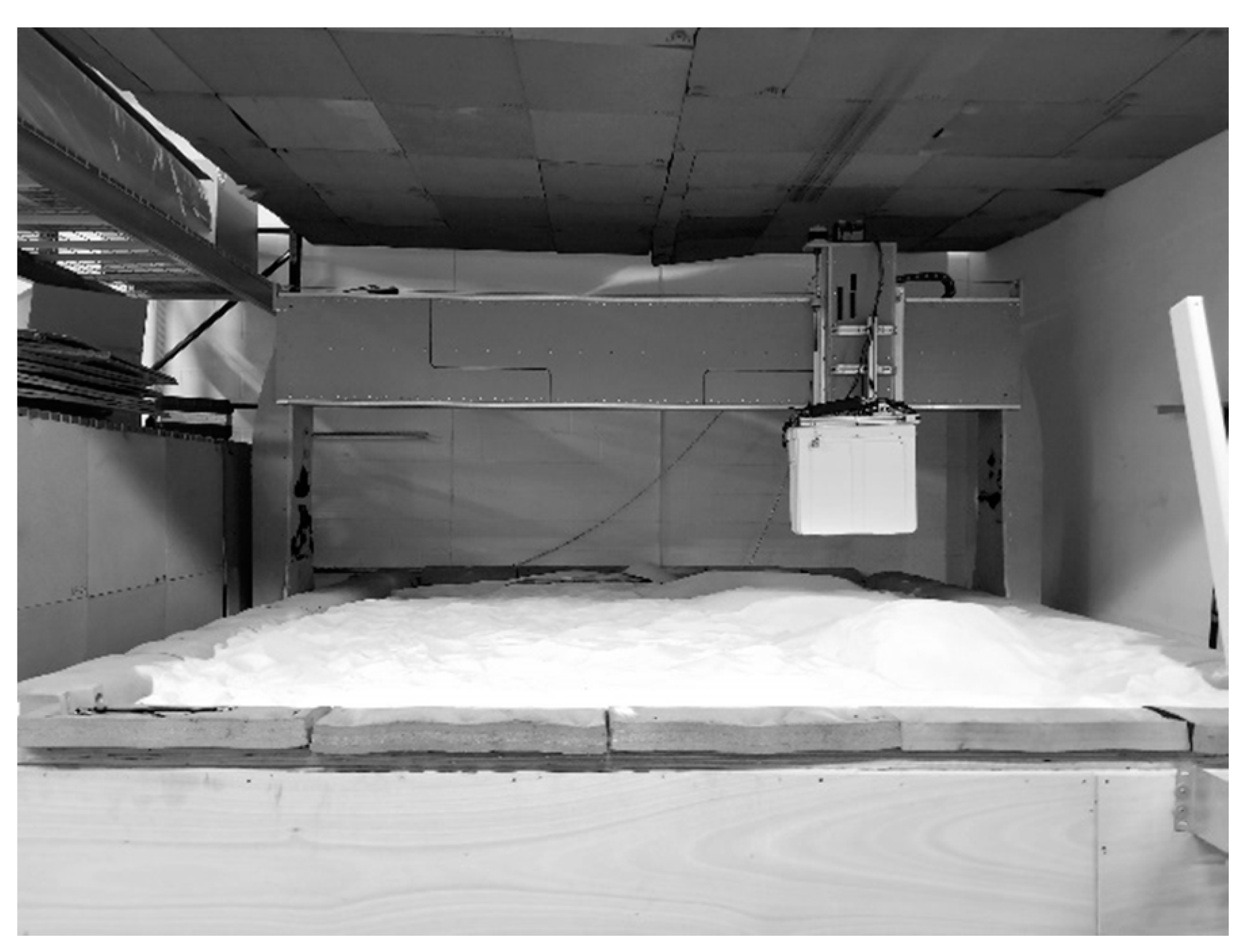
2. Materials and Methods
3. Results
3.1. Cross-Line Spacing
3.2. Polarization
3.3. Depth
4. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Allem, A.C. The Origins and Taxonomy of Cassava, in Cassava: Biology, Production and Utilization; Hillcocks, R.J., Thresh, J.M., Bellotti, A.C., Eds.; CABI Publishing: New York, NY, USA, 2002; pp. 1–16. [Google Scholar]
- Nassar, N.; Ortiz, R. Breeding cassava to feed the poor. Sci. Am. 2010, 302, 78–84. [Google Scholar] [CrossRef] [PubMed]
- Ceballos, H.; Ramirez, J.; Bellotti, A.C.; Jarvis, A.; Alvarez, E. Adaptation of cassava to changing climates. In Crop Adaptation to Climate Change; Blackwell Publishing Ltd.: Hoboken, NJ, USA, 2011; pp. 411–425. [Google Scholar]
- FAO. FAOSTAT—Country/Territorial Notes: Yield of Commodity. [Database] 2015; Group—Production, Domain—Crops, Area—Africa and South Eastern Asia, Item—Cassava, Element—Yield]. Available online: http://faostat3.fao.org/compare (accessed on 29 March 2016).
- Ceballos, H.; Hershey, C.; Becerra-López-Lavalle, L.A. New approaches to cassava breeding. Plant Breed. Rev. 2012, 36, 427–504. [Google Scholar]
- Okogbenin, E.; Setter, T.L.; Ferguson, M.; Mutegi, R.; Ceballos, H.; Olasanmi, B.; Fregene, M. Phenotypic approaches to drought in cassava: Review. Front. Physiol. 2013, 4, 93. [Google Scholar] [CrossRef] [PubMed]
- Ceballos, H.; Hershey, C.H. Cassava (Manihot esculenta Crantz). In Genetic Improvement of Tropical Crops; Springer: Cham, Switzerland, 2017; pp. 129–180. [Google Scholar]
- Majdi, H. Root sampling methods-applications and limitations of the minirhizotron technique. Plant Soil 1996, 185, 255–258. [Google Scholar] [CrossRef]
- Perret, J.S.; Al-Belushi, M.E.; Deadman, M. Non-destructive visualization and quantification of root using computed tomography. Soil Biol. Biochem. 2007, 39, 391–399. [Google Scholar] [CrossRef]
- Metzner, R.; Eggert, A.; van Dusschoten, D.; Pflugfelder, D.; Gerth, S.; Schurr, U.; Uhlmann, N.; Jahnke, S. Direct comparison of MRI and X-ray CT technologies for 3D maging of root systems in soil: Potential and challenges for root trait quantification. Plant Methods 2015, 11, 17. [Google Scholar] [CrossRef]
- Al-Nuaimy, W.; Huang, Y.; Nakhkash, M.; Fang, M.T.C.; Nguyen, V.T.; Eriksen, A. Automatic detection of buried utilities and solid objects with GPR using neural networks and pattern recognition. J. Appl. Geophys. 2000, 43, 157–165. [Google Scholar] [CrossRef]
- Frigui, H.; Gader, P. Detection and discrimination of land mines in ground-penetrating radar based on edge histogram descriptors and a possibilistic-nearest neighbor classifier. IEEE Trans. Fuzzy Syst. 2009, 17, 185–199. [Google Scholar] [CrossRef]
- Ho, K.; Carin, L.; Gader, P.D.; Wilson, J.N. An investigation of using the spectral characteristics from ground penetrating radar for landmine/clutter discrimination. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1177–1191. [Google Scholar] [CrossRef]
- Pasolli, E.; Melgani, F.; Donelli, M.; Attoui, R.; De Vos, M. Automatic detection and classification of buried objects in GPR images using genetic algorithms and support vector machines. In Proceedings of the IGARSS 2008—2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 7–11 July 2008. [Google Scholar]
- Andrén, O.; Rajkai, K.; Kätterer, T. A non-destructive technique for studies of root distribution in relation to soil moisture. Agric. Ecosyst. Environ. 1991, 34, 269–278. [Google Scholar] [CrossRef]
- Bassuk, N.; Grabosky, J.; Mucciardi, A.; Raffel, G. Ground-penetrating radar accurately locates tree roots in two soil media under pavement. Arboric. Urban For. 2011, 37, 160–166. [Google Scholar]
- Butnor, J.; Pruyn, M.L.; Shaw, D.C.; Harmon, M.E.; Mucciardi, A.N.; Ryan, M.G. Detecting defects in conifers with ground penetrating radar: Applications and challenges. For. Pathol. 2009, 39, 309–322. [Google Scholar] [CrossRef]
- Butnor, J.R.; Barton, C.; Day, F.P.; Johnsen, K.H.; Mucciardi, A.N.; Schroeder, R.; Stover, D.B. Using Ground Penetrating to Detect Tree Roots and Estimate Biomass. In Measuring Roots: An Updated Approach; Mancuso, S., Ed.; Springer: New York, NY, USA, 2011; pp. 213–246. [Google Scholar]
- Butnor, J.R.; Doolittle, J.A.; Johnsen, K.H.; Samuelson, L.; Stokes, T.; Kress, L. Utility of ground-penetrating radar as a root biomass survey tool in forest systems. Soil Sci. Soc. Am. J. 2003, 67, 1607–1615. [Google Scholar] [CrossRef]
- Butnor, J.R.; Doolittle, J.A.; Kress, L.; Cohen, S.; Johnsen, K.H. Use of ground-penetrating radar to study tree roots in the southeastern United States. Tree Physiol. 2001, 21, 1269–1278. [Google Scholar] [CrossRef] [Green Version]
- Cui, X.; Chen, J.; Shen, J.; Cao, X.; Chen, X.; Zhu, X. Modeling tree root diameter and biomass by ground-penetrating radar. Sci. China Earth Sci. 2011, 54, 711–719. [Google Scholar] [CrossRef]
- Cui, X.; Guo, L.; Chen, J.; Chen, X.; Zhu, X. Estimating tree-root biomass in different depths using ground-penetrating radar: Evidence from a controlled experiment. IEEE Trans. Geosci. Remote Sens. 2013, 51, 3410–3423. [Google Scholar] [CrossRef]
- Guo, L.; Lin, H.; Fan, B.; Cui, X.; Chen, J. Forward simulation of root’s ground penetrating radar signal: Simulator development and validation. Plant Soil 2013, 372, 487–505. [Google Scholar] [CrossRef]
- Guo, L.; Lin, H.; Fan, B.; Cui, X.; Chen, J. Impact of root water content on root biomass estimation using ground penetrating radar: Evidence from forward simulations and field controlled experiments. Plant Soil 2013, 371, 503–520. [Google Scholar] [CrossRef]
- Hirano, Y.; Dannoura, M.; Aono, K.; Igarashi, T.; Ishii, M.; Yamase, K.; Makita, N.; Kanazawa, Y. Limiting factors in the detection of tree roots using ground-penetrating radar. Plant Soil 2009, 319, 15–24. [Google Scholar] [CrossRef]
- Molon, M.M. Quantitative, Non-Destructive Estimates of Forest Coarse Root Biomass Using 3-D Ground-Penetrating Radar (GPR). Ph.D. Thesis, McMaster University, Hamilton, ON, Canada, 2012. [Google Scholar]
- Raz-Yaseef, N.; Koteen, L.; Baldocchi, D.D. Coarse root distribution of a semi-arid oak savanna estimated with ground penetrating radar. J. Geophys. Res. Biogeosci. 2013, 118, 135–147. [Google Scholar] [CrossRef] [Green Version]
- Zhu, S.; Huang, C.; Su, Y.; Sato, M. 3D Ground Penetrating Radar to Detect Tree Roots and Estimate Root Biomass in the Field. Remote Sens. 2014, 6, 5754–5773. [Google Scholar] [CrossRef] [Green Version]
- Delgado, A.; Hays, D.B.; Bruton, R.K.; Ceballos, H.; Novo, A.; Boi, E.; Selvaraj, M.G. Ground penetrating radar: A case study for estimating root bulking rate in cassava (Manihot esculenta Crantz). Plant Methods 2017, 13, 65. [Google Scholar] [CrossRef]
- Daniels, D.J. Ground penetrating radar. In Encyclopedia of RF and Microwave Engineering; IET: Hoboken, NJ, USA, 2004; Volume 1. [Google Scholar]
- Jol, H.M. Ground Penetrating Radar Theory and Applications; Elsevier: Amsterdam, The Netherlands, 2008. [Google Scholar]
- Pasculli, D.; Natali, A.; Salvatore, W.; Morelli, F.; Morandi, D. Investigation of reinforced concrete bridges by using a dual-polarized high-frequency GPR. In Proceedings of the 2018 17th International Conference on Ground Penetrating Radar (GPR), Rapperswil, Switzerland, 18–21 June 2018. [Google Scholar]
- Grasmueck, M.; Novo, A. 3D GPR imaging of shallow plastic pipes, tree roots, and small objects. In Proceedings of the 2016 16th International Conference on Ground Penetrating Radar (GPR), Hong Kong, China, 13–16 June 2016. [Google Scholar]
- Grasmueck, M.; Weger, R.; Horstmeyer, H.J.G. Full-resolution 3D GPR imaging. Geophysics 2005, 70, K12–K19. [Google Scholar] [CrossRef]
- Goodman, D. GPR-SLICE Software; Geophysical Archaeometry Laboratory Inc.: Woodland Hills, CA, USA, 2016. [Google Scholar]
- Autodesk, Inc. AutoCAD 2012; Autodesk, Inc.: San Rafael, CA, USA, 2011. [Google Scholar]
- Simi, A.; Manacorda, A. Benedetto. Bridge deck survey with high resolution ground penetrating radar. In Proceedings of the 2012 14th International Conference on Ground Penetrating Radar (GPR), Shanghai, China, 4–8 June 2012. [Google Scholar]
- Pasculli, D.; Giannino, F.; Simi, A.; Manacorda, G. High-density dual polarized GPR array for underground asset mapping. In Proceedings of the 2017 9th International Workshop on Advanced Ground Penetrating Radar (IWAGPR), Edinburgh, UK, 28–30 June 2017. [Google Scholar]
- Simi, A.; Manacorda, G.; Miniati, M.; Bracciali, S.; Buonaccorsi, A. Underground asset mapping with dual-frequency dual-polarized GPR massive array. In Proceedings of the XIII International Conference on Ground Penetrating Radar (GPR), Lecce, Italy, 21–25 June 2012. [Google Scholar]
- Detsch, R.M.; Jenkins, T.F.; Arcone, S.A.; Koh, G.; O’Neill, K. Environmental effects on detection of buried mines and UXO. In Detection and Remediation Technologies for Mines and Minelike Targets III; Aerospace/Defense Sensing and Controls; Intermational Society for Optics and Photonics: Bellingham, WA, USA, 1998. [Google Scholar]
- Doolittle, J.A.; Collins, M.E. Use of soil information to determine application of ground penetrating radar. J. Appl. Geophys. 1995, 33, 101–108. [Google Scholar] [CrossRef]
- Igel, J. The small-scale variability of electrical soil properties-influence on GPR measurements. In Proceedings of the 12th International Conference on Ground Penetrating Radar, Birmingham, UK, 16–19 June 2008. [Google Scholar]
- Miller, T.W.; Borchers, B.; Hendrickx, J.M.; Hong, S.; Dekker, L.W.; Ritsema, C.J. Effects of soil physical properties on GPR for landmine detection. In Proceedings of the Fifth International Symposium on Thecnology and the Mine Problem, Monterey, CA, USA, 22–25 April 2002. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
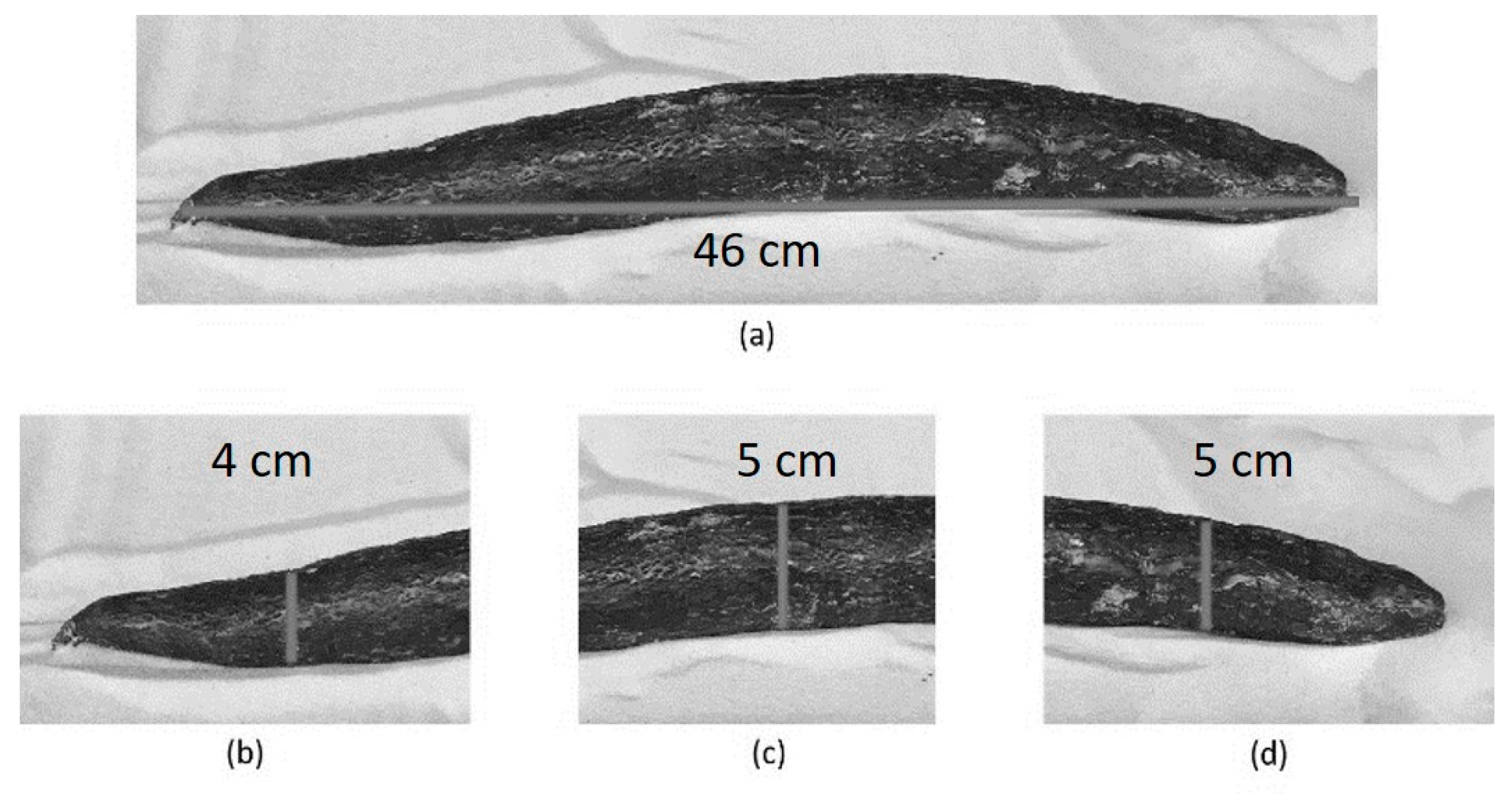
| Root Number | Length | Width 1 | Width 2 | Width 3 |
|---|---|---|---|---|
| Large Root Classification | ||||
| Root 1 | 38 cm | 6 cm | 9 cm | 8 cm |
| Root 2 | 36 cm | 5 cm | 8 cm | 9 cm |
| Root 3 | 46 cm | 4 cm | 5 cm | 5 cm |
| Medium Root Classification | ||||
| Root 4 | 37 m | 4 cm | 5 cm | 5 cm |
| Root 5 | 35 m | 4 cm | 5 cm | 5 cm |
| Root 6 | 30 m | 4 cm | 6 cm | 5 cm |
| Small Root Classification | ||||
| Root 7 | 25 m | 4 cm | 4 cm | 4 cm |
| Root 8 | 20 m | 4 cm | 5 cm | 4 cm |
| Root 9 | 20 m | 3 cm | 6 cm | 5 cm |
| Results of Cross-Line Spacing Decimation for three Root Size Classes | |||
|---|---|---|---|
| Root Length | |||
| Small | Medium | Large | |
| Cross-line Spacing | RMSE SD | RMSE SD | RMSE SD |
| 2.5 cm | 9.0 cm ± 2.4 cm | 8.4 cm ± 4.8 cm | 6.3 cm ± 2.4 cm |
| 5 cm | 7.1 cm ± 1.9 cm | 9.7 cm ± 6.5 cm | 6.4 cm ± 3.4 cm |
| 10 cm | 7.5 cm ± 1.4 cm | 10.9 cm ± 7.9 cm | 4.8 cm ± 5.2 cm |
| Root Width | |||
| Small | Medium | Large | |
| Cross-line Spacing | RMSE SD | RMSE SD | RMSE SD |
| 2.5 cm | 7.9 cm ± 2.3 cm | 5.6 cm ± 2.3 cm | 9.6 cm ± 2.5 cm |
| 5 cm | 6.9 cm ± 2.7 cm | 6.5 cm ± 2.3 cm | 9.9 cm ± 2.2 cm |
| 10 cm | 7.7 cm ± 3.3 cm | 6.9 cm ± 3.0 cm | 11.9 cm ± 3.2 cm |
| Polarization Response to Orientation | ||||||
|---|---|---|---|---|---|---|
| VV Polarization | ||||||
| Root Length | ||||||
| Horizontal to Surface | Vertical to Surface | |||||
| Small | Medium | Large | Small | Medium | Large | |
| RMSE SD | RMSE SD | RMSE SD | RMSE SD | RMSE SD | RMSE SD | |
| Angle | 4.7 cm ± 2.1 cm | 3.3 cm ± 2.7 cm | 2.3 cm ± 1.4 cm | 11.1 cm ± 3.8 cm | 8.4 cm ± 6.2 cm | 6.8 cm ± 4.7 cm |
| Parallel | 3.1 cm ± 2.5 cm | 4.6 cm ± 3.4 cm | 3.1 cm ± 2.8 cm | * | * | * |
| Perpendicular | 5.8 cm ± 5.2 cm | 2.1 cm ± 2.6 cm | 4.2 cm ± 3.1 cm | 8.8 cm ± 1.5 cm | 9.1 cm ± 2.5 cm | 7.9 cm ± 2.5 cm |
| Root Width | ||||||
| Horizontal to Surface | Vertical to Surface | |||||
| Small | Medium | Large | Small | Medium | Large | |
| RMSE SD | RMSE SD | RMSE SD | RMSE SD | RMSE SD | RMSE SD | |
| Angle | 1.2 cm ± 1.2 cm | 2.6 cm ± 1.5 cm | 1.8 cm ± 1.5 cm | 5.8 cm ± 1.5 cm | 9.7 cm ± 3.7 cm | 5.3 cm ± 2.1 cm |
| Parallel | 3.1 cm ± 2.5 cm | 6.0 cm ± 2.3 cm | 19.1 cm ± 2.6 cm | * | * | * |
| Perpendicular | 1.4 cm ± 0.6 cm | 4.2 cm ± 3.2 cm | 3.9 cm ± 1.5 cm | 3.1 cm ± 1.0 cm | 4.8 cm ± 1.5 cm | 3.7 cm ± 2.6 cm |
| HH Polarization | ||||||
| Root Length | ||||||
| Horizontal to Surface | Vertical to Surface | |||||
| Small | Medium | Large | Small | Medium | Large | |
| RMSE SD | RMSE SD | RMSE SD | RMSE SD | RMSE SD | RMSE SD | |
| Angle | 6.7 cm ± 1.2 cm | 5.2 cm ± 2.1 cm | 3.5 cm ±2.0 cm | 7.4 cm ± 4.0 cm | 9.3 cm ± 3.8 cm | 11.5 cm ± 7.6 cm |
| Parallel | 10.9 cm ± 8.1 cm | 8.7 cm ± 7.3 cm | 16.5 cm ± 9.6 cm | * | * | * |
| Perpendicular | 12.3 cm ± 0.6 cm | 10.0 cm ± 1.9 cm | 9.2 cm ± 3.4 cm | * | * | * |
| Root Width | ||||||
| Horizontal to Surface | Vertical to Surface | |||||
| Small | Medium | Large | Small | Medium | Large | |
| RMSE SD | RMSE SD | RMSE SD | RMSE SD | RMSE SD | RMSE SD | |
| Angle | 4.0 cm ± 2.1 cm | 3.0 cm ± 3.5 cm | 7.4 cm ± 4.0 cm | 5.0 cm ± 3.1 cm | 6.2 cm ± 2.0 cm | 9.2 cm ± 2.0 cm |
| Parallel | 16.7 cm ± 7.0 cm | 20.9 cm ± 3.5 cm | 11.0 cm ± 4.7 cm | * | * | * |
| Perpendicular | 7.4 cm ± 1.5 cm | 8.7 cm ± 0.6 cm | 7.9 cm ± 2.5 cm | * | * | * |
| Depth Analysis | |||
|---|---|---|---|
| Small | Medium | Large | |
| RMSE SD | RMSE SD | RMSE SD | |
| Width 1 | 3.1 cm ± 1.0 cm | 5.0 cm ± 3.1 cm | 5.8 cm ± 1.5 cm |
| Width 2 | 4.8 cm ± 1.5 cm | 6.2 cm ± 2.0 cm | 13.1 cm ± 1.7 cm |
| Width 3 | 3.7 cm ± 2.6 cm | 9.1 cm ± 2.0 cm | 20.8 cm ± 3.1 cm |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Delgado, A.; Novo, A.; Hays, D.B. Data Acquisition Methodologies Utilizing Ground Penetrating Radar for Cassava (Manihot esculenta Crantz) Root Architecture. Geosciences 2019, 9, 171. https://doi.org/10.3390/geosciences9040171
Delgado A, Novo A, Hays DB. Data Acquisition Methodologies Utilizing Ground Penetrating Radar for Cassava (Manihot esculenta Crantz) Root Architecture. Geosciences. 2019; 9(4):171. https://doi.org/10.3390/geosciences9040171
Chicago/Turabian StyleDelgado, Alfredo, Alexandre Novo, and Dirk B. Hays. 2019. "Data Acquisition Methodologies Utilizing Ground Penetrating Radar for Cassava (Manihot esculenta Crantz) Root Architecture" Geosciences 9, no. 4: 171. https://doi.org/10.3390/geosciences9040171
APA StyleDelgado, A., Novo, A., & Hays, D. B. (2019). Data Acquisition Methodologies Utilizing Ground Penetrating Radar for Cassava (Manihot esculenta Crantz) Root Architecture. Geosciences, 9(4), 171. https://doi.org/10.3390/geosciences9040171