
Towards a Cyber-Physical Range for the Integrated Navigation System (INS)




Abstract
:1. Introduction
- We provide a complete list of INS constituents, with all components and their interactions presented, along with associated international rules, regulations and standards;
- We provide a systematic literature review of publications on bridge testbeds;
- We propose an architecture for a Cyber-Physical Range, i.e., a cybersecurity-enabled testbed for the INS.
2. Related Work
2.1. INS and Its Components
- Resolution MSC.252(83) “Adoption of the Revised Performance Standards for Integrated Navigation Systems (INS) Introduction, Contents, Module A–B” [5];
- Resolution MSC.252(83) “Adoption of the Revised Performance Standards for Integrated Navigation Systems (INS)—Module C–D” [7];
- Resolution MSC.252(83) “Adoption of the Revised Performance Standards for Integrated Navigation Systems (INS)—Appendices” [6].
- SOLAS Chapter V “Safety of Navigation”, Regulation 19 “Carriage requirements for shipborne navigational systems and equipment”;
- MSC/Circ.982 “Guidelines on Ergonomic Criteria for Bridge Equipment and Layout”.
2.2. Networking
2.3. Testbeds
2.4. Cybersecurity of the INS
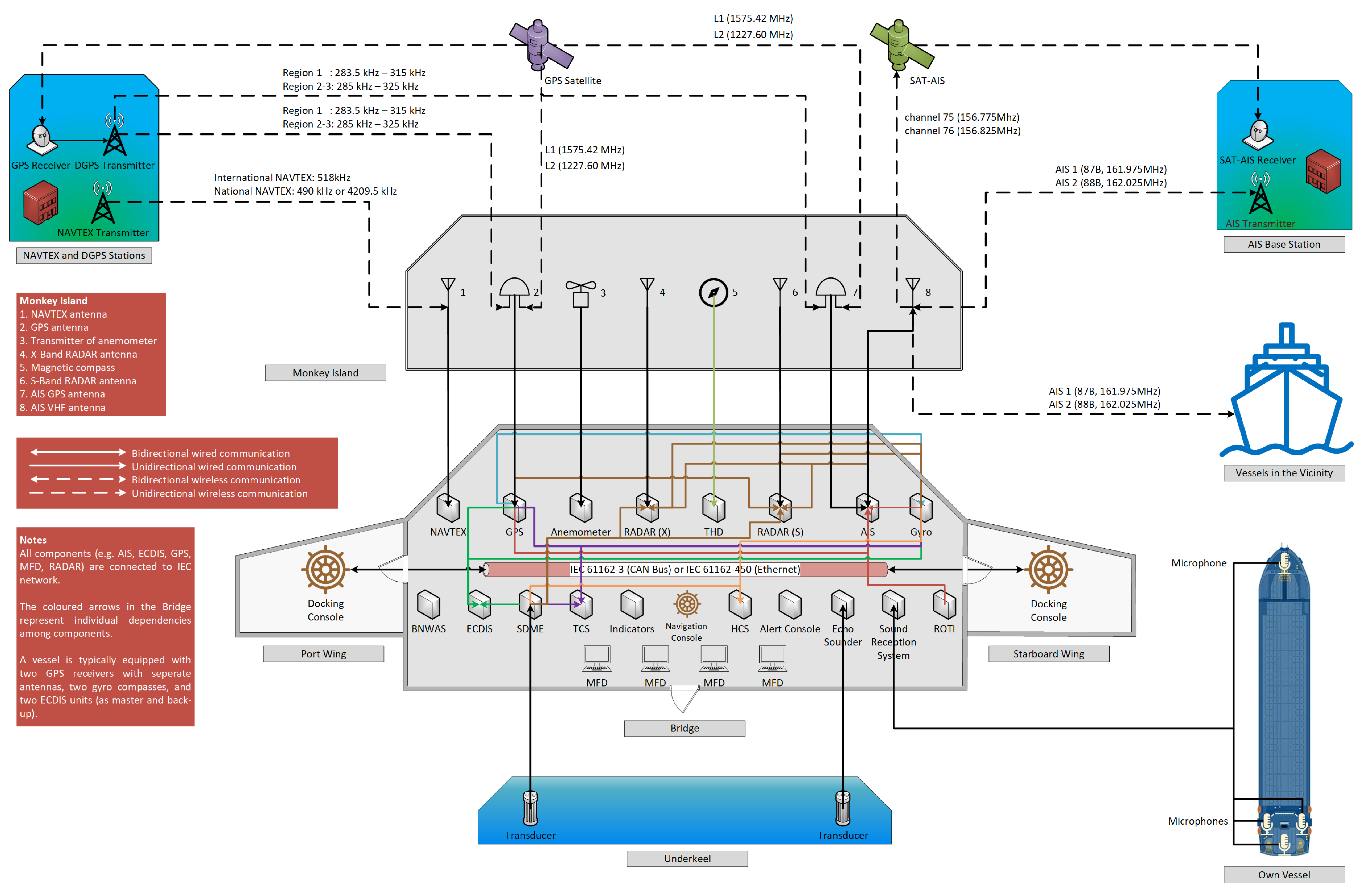
3. The Composition of the INS
3.1. INS Components
3.1.1. Automatic Identification System (AIS)
- identifying ships;
- assisting in target tracking;
- exchanging information;
- providing additional information to assist situation awareness.
3.1.2. Anemometer
3.1.3. Bridge Navigational Watch Alarm System (BNWAS)
3.1.4. Central Alert Management Human Machine Interface (HMI)
3.1.5. Controls for Main Engine (M/E)
3.1.6. Controls for Main Rudder
3.1.7. Controls for Thruster
3.1.8. Electronic Chart Display and Information System (ECDIS)
3.1.9. Echo Sounder
3.1.10. Global Positioning System (GPS)
3.1.11. Gyro-Compass
3.1.12. Heading Control System (HCS)
3.1.13. Indicators
3.1.14. Magnetic Compass
3.1.15. Multifunctional Display (MFD)
3.1.16. NAVigational TEleX (NAVTEX)
3.1.17. RAdio Detection And Ranging (RADAR)
3.1.18. Rate of Turn Indicator (ROTI)
3.1.19. Rudder Pump Selector Switch
3.1.20. Speed and Distance Measuring Device (SDMD)
3.1.21. Sound Reception System
3.1.22. Steering Mode Selector Switch
3.1.23. Steering Position Selector Switch
3.1.24. Track Control System (TCS)
3.1.25. Transmitting Heading Device (THD)
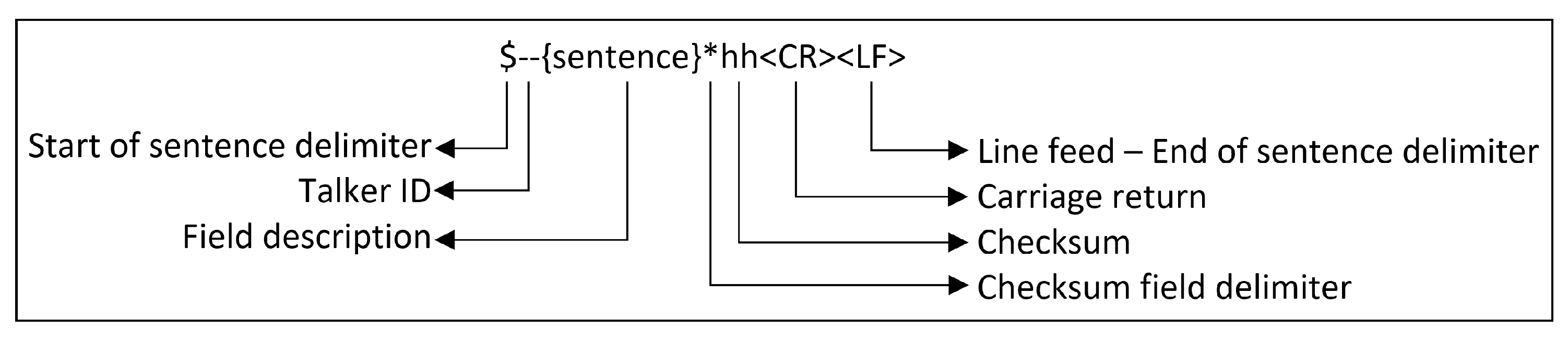
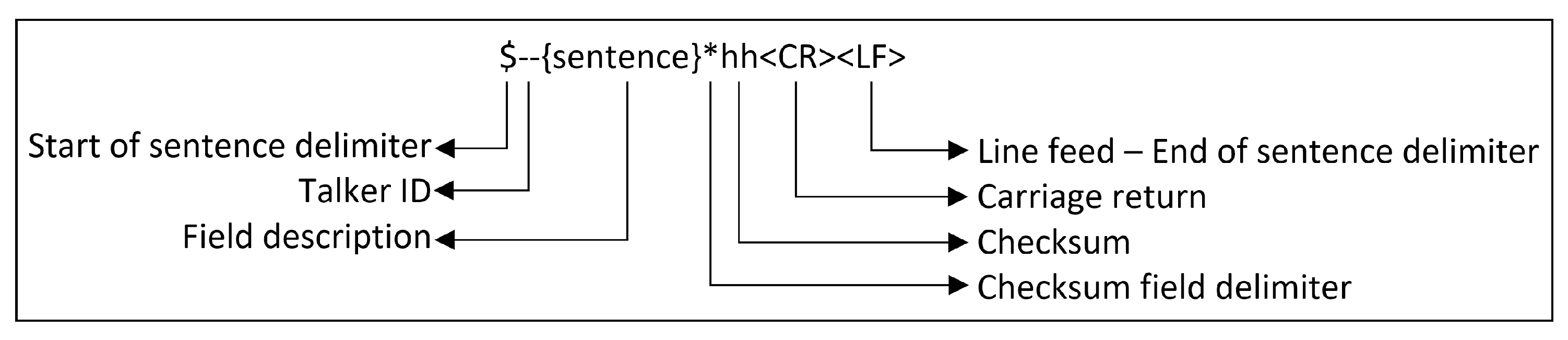
3.2. Communication Protocols and Interfaces
3.2.1. Non-Device-Specific
- IEC 61162-1: Single talker and multiple listeners;
- IEC 61162-2: Single talker and multiple listeners, high speed transmission;
- IEC 61162-3: Multiple talkers and multiple listeners—Serial data instrument network;
- IEC 61162-450: Multiple talkers and multiple listeners—Ethernet interconnection;
- IEC 61162-460: Multiple talkers and multiple listeners—Ethernet interconnection—Safety and security.
3.2.2. AIS-Specific
- AIS 1 (Channel 87B, 161.975 MHz);
- AIS 2 (Channel 88B, 162.025 MHz);
- channel 75 (156.775 MHz), Message 27 transmission only;
- channel 76 (156.825 MHz), Message 27 transmission only.
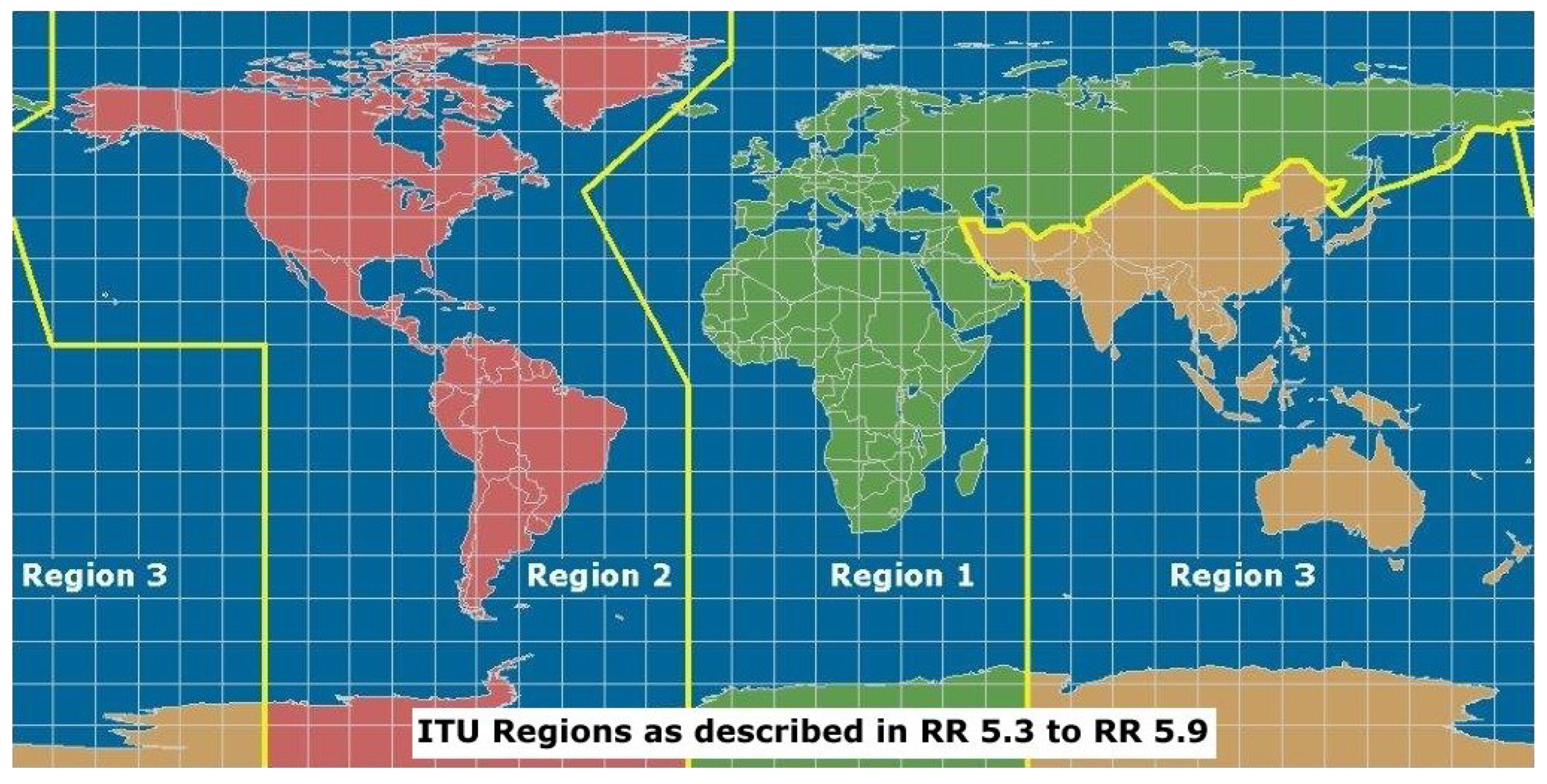
3.2.3. GPS-Specific
3.2.4. NAVTEX-Specific
3.3. Data
3.4. Sub-Components
3.5. Connections and Dependencies
- heading information system (e.g., Gyro compass);
- heading/track control system;
- electronic position-fixing systems (e.g., GPS);
- speed and distance measuring equipment;
- radar with target tracking functions;
- ECDIS;
- AIS;
- echo sounding equipment;
- GMDSS equipment (e.g., NAVTEX);
- relevant machinery alarms for early warning."
4. An INS Cyber-Physical Range
4.1. Capabilities and Functionalities
4.2. Standards and Frameworks
4.3. Hardware Components
4.4. Monitoring and Management Tools
4.5. Simulation, Emulation, and Analysis Tools
4.6. Cybersecurity-Specific Components
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
| Equipment and Sub-Components | Service | Data | Required Data Flow |
|---|---|---|---|
AIS
| identifying ships, assisting in target tracking, assisting in search and rescue operation, information exchange, providing additional information to assist situation awareness [47] | Static Data: MMSI, Callsign and name, IMO number, Length and beam, Type of ship, Location of EPFS antenna Dynamic Data: Ship position, Position time stamp in UTC, COG, SOG, Heading, Navigation status, Rate of turn Voyage related Data: Ship’s draught, Hazardous cargo type, Destination and ETA, Route plan Safety messages [47] | Sends to: RADAR [46] |
Anemometer
| detecting and indicating wind speed and direction | wind speed and direction [52] | |
BNWAS
| monitoring bridge activity, detecting operator disability and then alerting automatically [54] | awareness of OOW [54] | |
Central Alert Management HMI
| reporting abnormal situation which requires an attention [55] | provides acknowledged, unacknowledged or normal condition [55] | Receives from: sensors connected |
Controls for M/E
| Control buttons or levers of main engine for different purposes such as rpm, load, emergency stop button, sailing mode selection button, and so on | functional data as to main engine | |
Controls for main rudder
| commanding the rudder angel, activating the override mode | rudder command, override mode status | |
Controls for thruster
| commanding the thrusters such as starting, stopping, load/stage, etc. | indicating load/stage of thruster | |
ECDIS
| offering the functions of route planning, route monitoring and positioning for officers in ECDIS instead of paper charts [57] | provides data regarding route planning, route monitoring, navigational elements and parameters such as own ship’s position, past track with time marks, planned course and speed, planned position with date and time, waypoint, distance to run, own ship’s safety contour, coastline, and so on [57] | Receive from: GPS, gyro compass, speed and distance measuring device. If the ships aren’t equipped with gyro compass, ECDIS receives data from the transmitting heading device [57] |
Echo Sounder
| measuring the depth of water under the ship, and presenting graphically [58] | measured depth of water under a ship [58] | |
GPS
| providing space-based positioning, velocity and time system [60] | position information in latitude and longitude of the vessel, UTC, SOG, COG [60] | Sends to: AIS [101], RADAR [46], ECDIS [57], Heading control system [70], Track Control System [81], Gyro compass [108] |
Gyro-compass
| determining the direction of the ship’s head in relation to geographic (true) north [69] | direction of the ship’s head in relation to (geographic) true north [69] | Sends to: AIS [101], RADAR [46], ECDIS [57], Heading control system [70], Track control system [81] Receives from: GPS [108] |
Heading Control System
| keeping the vessel in preset heading by using heading information [70] | steering mode, heading source, preset heading value [70] | Receives from: Gyro compass or Transmitting Heading Device. Moreover, GPS or SDMD [70] |
| Indicators | shows data or status information received from sensor | several data/status such as propeller and main engine revolutions, pitch value for Controllable Pitch Propellers (CPP), torque, starting air, lateral thrust, speed, rudder angle, gyro-compass heading, magnetic compass heading, heading reminder, water depth, time, air and water temperature, wind direction and velocity [55] | Receives from: Sensors connected. |
Magnetic Compass
| determining and displaying the ship’s heading without any power supply [71] | indicating the direction of the ship’s head in relation to magnetic north [151] | Sends to: THD |
Multifunctional Display (MFD)
| A display unit presents information from more than a single function of the INS [6] | displays data and graphic depending on connected equipment | depends on connected equipment |
NAVTEX
| receiving and automatically printing or displaying MSI [99] | navigational warnings, meteorological warnings, ice reports, search and rescue information, piracy warnings, tsunamis and other natural phenomena, meteorological forecasts, pilot and VTS service messages, AIS service messages (non navigational aid), LORAN messages, GNSS messages regarding PRN status, Other electronic navigational aid system messages, other navigational warnings [99] | |
RADAR
| indication, in relation to own ship, of the position of other surface craft, obstructions and hazards, navigation objects and shorelines [46] | target tracking information, positional data derived from own ship’s position (EPFS), geo referenced data [46] | Receives from: AIS, GPS, Speed and Distance Measuring Device. Moreover, Gyro compass or Transmitting Heading Device [46] |
ROTI
| indicating rates of turn to starboard and to port of the ship to which it is fitted [76] | indicates the rate of turning of a ship within 1 min [76] | Sends to: AIS [101] |
Rudder pump selector switch
| selection of primary and secondary (emergency) hydraulic or electro-hydraulic pumps for rudder direction. | indicating primary and secondary (emergency) hydraulic or electro-hydraulic pump for rudder | |
Sound reception system
| offers the OOW who can hear and determine the direction of the sound signals of the vessels nearby [71] | sound direction [71] | |
Speed and Distance Measuring Equipment
| measuring and indicating speed and distance of the vessel [77] | distance run speed of the vessel overground or speed of the vessel through water [77] | sends to: Heading control system [70], RADAR [46], ECDIS [57], Track control system [81] |
Steering mode selector switch
| selection of steering modes, such as “Auto”, “Non-Follow Up”, or ”Follow Up”. | active steering mode (i.e., “NFU”, “FU”, and ”Auto”). | |
Steering position selector switch
| determining the active steering workstation (i.e., port wing, starboard wing or center) | active steering workstation (i.e., port wing, starboard wing or center) | |
Track Control System
| Track control system keeps the vessel on a pre-planned track over ground by using position, heading and speed information of the vessel [81] | mode of steering; sources of actual position, heading and speed; status and failure of sensors (if any); track course and actual heading; actual position, cross track distance and speed; TO-waypoint and NEXT-waypoint; time and distance to TO-waypoint; next track course; and selected track identification [81] | Receives from: GPS, Speed and Distance Measuring Equipment, Gyro compass [81] |
Transmitting Heading Device
| indicating ship’s true heading by means of magnetic compass [82] | ship’s true heading [82] | Receive from: magnetic compass Sends to: AIS [101], Heading control system [70], Track control system [81], ECDIS [57], RADAR [46] |
| 1 | The IALA-recognized e-navigation testbeds are listed on https://www.iala-aism.org/technical/e-nav-testbeds/, accessed on 4 October 2021. |
References
- EMSA. Annual Overview of Marine Casualties and Incidents. Available online: http://www.emsa.europa.eu/newsroom/latest-news/item/4266-annual-overview-of-marine-casualties-and-incidents-2020.html (accessed on 6 August 2021).
- IMO. Resolution MSC.467(101) Guidance on the Definition and Harmonization of the Format and Structure of Maritime Services in the Context of E-Navigation; IMO: London, UK, 2019. [Google Scholar]
- IMO. MSC.1/Circ.1595 E-Navigation Strategy Implementation Plan—Update 1; IMO: London, UK, 2018. [Google Scholar]
- IMO. Resolution A.915(22) Revised Maritime Policy and Requirements for a Future Global Navigation Satellite System (GNSS); IMO: London, UK, 2001. [Google Scholar]
- IMO. Resolution MSC.252(83) Amended in 2018, Adoption of the Revised Performance Standards for Integrated Navigation Systems (INS), Introduction, Contents, Module A-B; IMO: London, UK, 2007. [Google Scholar]
- IMO. Resolution MSC.252(83) Amended in 2018, Adoption of the Revised Performance Standards for Integrated Navigation Systems (INS), Appendices; IMO: London, UK, 2007. [Google Scholar]
- IMO. Resolution MSC.252(83) Adoption of the Revised Performance Standards for Integrated Navigation Systems (INS), Module C-D; IMO: London, UK, 2007. [Google Scholar]
- Stratmann, T.C.; Gruenefeld, U.; Hahn, A.; Boll, S.; Stratmann, J.; Schweigert, S. Mobile Bridge—A portable design simulator for ship bridge interfaces. Trans. Nav. Int. J. Mar. Navig. Saf. Sea Transp. 2018, 12, 763–768. [Google Scholar] [CrossRef]
- IMO. MSC.1/Circ.1494 Guidelines on Harmonization of Testbed Reporting; IMO: London, UK, 2014. [Google Scholar]
- Svilicic, B.; Rudan, I.; Jugović, A.; Zec, D. A Study on Cyber Security Threats in a Shipboard Integrated Navigational System. J. Mar. Sci. Eng. 2019, 7, 364. [Google Scholar] [CrossRef] [Green Version]
- Lund, M.S.; Gulland, J.E.; Hareide, O.S.; Jøsok, ∅.; Weum, K.O.C. Integrity of Integrated Navigation Systems. In Proceedings of the 2018 IEEE Conference on Communications and Network Security (CNS), Beijing, China, 30 May–1 June 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Lund, M.S.; Hareide, O.S.; Jøsok, ∅. An attack on an integrated navigation system. Necesse 2018, 3, 149–163. [Google Scholar]
- Navis Arca. About Us. Available online: https://navisarca.com/ (accessed on 4 October 2021).
- Cydome. Solutions. Available online: https://cydome.io/solutions/ (accessed on 4 October 2021).
- IMO. The IMO-Vega Database. Available online: https://www.imo.org/en/publications/Pages/IMO-Vega.aspx (accessed on 6 August 2021).
- IMO. Resolution MSC.86(70) Annex 3 Recommendation on Performance Standards for an Integrated Navigation System (INS); IMO: London, UK, 1998. [Google Scholar]
- Luft, L.A.; Anderson, L.; Cassidy, F. NMEA 2000 A Digital Interface for the 21st Century. In Proceedings of the 2002 National Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 28–30 January 2002; pp. 796–807. [Google Scholar]
- Krile, S.; Kezić, D.; Dimc, F. NMEA Communication Standard for Shipboard Data Architecture. OUR SEA Int. J. Marit. Sci. Technol. 2013, 60, 68–81. [Google Scholar]
- ITU. About International Telecommunication Union (ITU). Available online: https://www.itu.int/en/about/Pages/default.aspx (accessed on 6 August 2021).
- ITU-R. M.1371-5: Technical Characteristics for an Automatic Identification System Using Time-Division Multiple Access in the VHF Maritime Mobile Band. 2014. Available online: https://www.itu.int/rec/R-REC-M.1371-5-201402-I/en (accessed on 6 August 2021).
- ITU-R. M.823: Technical Characteristics of Differential Transmissions for Global Navigation Satellite Systems from Maritime Radio Beacons in the Frequency Band 283.5–315 kHz in Region 1 and 285–325 kHz in Regions 2 and 3. 2006. Available online: https://www.itu.int/rec/R-REC-M.823/en (accessed on 6 August 2021).
- Okoli, C. A guide to conducting a standalone Systematic Literature Review. Commun. Assoc. Inf. Syst. 2015, 37. [Google Scholar] [CrossRef] [Green Version]
- Rüssmeier, N.; Lamm, A.; Hahn, A. A generic testbed for simulation and physical-based testing of maritime cyber-physical system of systems. In Proceedings of the International Maritime and Port Technology and Development Conference and International Conference on Maritime Autonomous Surface Ships, Trondheim, Norway, 13–14 November 2019; Volume 1357. [Google Scholar] [CrossRef]
- Kim, D.; Ahn, K.; Shim, S.; Oh, K.; Kim, Y. A study on the verification of collision avoidance support system in real voyages. In Proceedings of the 2015 International Association of Institutes of Navigation World Congress (IAIN), Prague, Czech Republic, 20–23 October 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Akkermann, A.; Hahn, A. Comparing simulation with physical verification and validation in a maritime test field. Int. J. Syst. Eng. 2020, 4, 18–29. [Google Scholar] [CrossRef]
- Hahn, A.; Noack, T. Emaritime integrated reference platform. In Proceedings of the Deutscher Luft- und Raumfahrtkongress, Braunschweig, Germany, 13–15 September 2016. [Google Scholar]
- Schweigert, S.; Gollücke, V.; Hahn, A.; Bolles, A. HAGGIS: A modelling and simulation platform for e-Maritime technology. In Proceedings of the INT-NAM 2014: 2nd International Symposium on Naval Architecture and Maritime, Istanbul, Turkey, 23–24 October 2014. [Google Scholar]
- Stasch, A.; Bolles, A.; Hahn, A. LABSKAUS—A physical platform for e-maritime technology assessment. In Proceedings of the 2nd International Symposium of Naval Architecture and Maritime, Istanbul, Turkey, 23–24 October 2014. [Google Scholar]
- Brinkmann, M.; Böde, E.; Lamm, A.; Maelen, S.V.; Hahn, A. Learning from automotive: Testing maritime assistance systems up to autonomous vessels. In Proceedings of the OCEANS 2017, Aberdeen, UK, 19–22 June 2017. [Google Scholar] [CrossRef]
- Brinkmann, M.; Hahn, A.; Hjøllo, B.Å. Physical testbed for highly automated and autonomous vessels. In Proceedings of the 16th International Conference on Computer and IT Applications in the Maritime Industries, Cardiff, UK, 15–17 May 2017. [Google Scholar]
- Bolles, A.; Hahn, A. Save maritime systems testbed. Annu. Navig. 2014, 21, 19–34. [Google Scholar] [CrossRef] [Green Version]
- Hahn, A. Simulation environment for risk assessment of e-navigation systems. In Proceedings of the ASME 2015 34th International Conference on Ocean, Offshore and Arctic Engineering, St. John’s, NL, Canada, 31 May–5 June 2015. [Google Scholar] [CrossRef]
- Hahn, A. Test bed for safety assessment of new e-navigation systems. Int. J. E-Navig. Marit. Econ. 2014, 1, 14–28. [Google Scholar] [CrossRef] [Green Version]
- Brinkmann, M.; Hahn, A. Testbed architecture for maritime cyber physical systems. In Proceedings of the 2017 IEEE 15th International Conference on Industrial Informatics (INDIN), Emden, Germany, 24–26 July 2017; pp. 923–928. [Google Scholar] [CrossRef]
- Brinkmann, M.; Stasch, A.; Hahn, A. Testbeds for verification and validation of maritime safety. In Proceedings of the 12th International Symposium on Integrated Ship’s Information Systems & Marine Traffic Engineering Conference, Hamburg, Germany, 31 August–2 September 2016. [Google Scholar]
- Brinkmann, M.; Abdelaal, M.; Hahn, A. Vessel-in-the-Loop architecture for testing highly automated maritime systems. In Proceedings of the 17th Conference on Computer and IT Applications in the Maritime Industries (COMPIT’18), Pavone, Italy, 14–16 May 2018. [Google Scholar]
- Hahn, A.; Gollücke, V.; Buschmann, C.; Schweigert, S. Virtual test bed for maritime safety assessment. Sci. J. Marit. Univ. Szczec. 2015, 44, 116–122. [Google Scholar] [CrossRef]
- The eMIR platform. Available online: http://https://www.emaritime.de/ (accessed on 5 December 2012).
- Tenable. Nessus Professional. Available online: https://www.tenable.com/products/nessus/nessus-professional (accessed on 4 October 2021).
- Awan, M.S.K.; Al Ghamdi, M.A. Understanding the Vulnerabilities in Digital Components of an Integrated Bridge System (IBS). J. Mar. Sci. Eng. 2019, 7, 350. [Google Scholar] [CrossRef] [Green Version]
- Oruc, A. Claims of State-Sponsored Cyberattack in the Maritime Industry. In Proceedings of the 15th International Naval Engineering Conference and Exhibition (INEC 2020), Virtual, 5–9 October 2020. [Google Scholar] [CrossRef]
- Lovell, K.N.; Heering, D. Exercise Neptune: MaritiMe cybersecurity training using the navigational siMulators. In Proceedings of the 5th Interdisciplinary Cyber Research Conference 2019, Tallinn, Estonia, 29 June 2019; p. 34. [Google Scholar]
- Tam, K.; Forshaw, K.; Jones, K.D. Cyber-SHIP: Developing Next Generation Maritime Cyber Research Capabilities. In Proceedings of the International Conference on Marine Engineering and Technology Oman 2019 (ICMET Oman), Muscat, Oman, 5–7 November 2019. [Google Scholar] [CrossRef]
- D’Agostino, F.; Kaza, D.; Schiapparelli, G.P.; Silvestro, F. The ShIL Project: A new laboratory infrastructure for co-simulation of multi-domain marine applications. In Proceedings of the 2020 AEIT International Annual Conference (AEIT), Catania, Italy, 23–25 September 2020; pp. 1–6. [Google Scholar]
- Furuno. Furuno Speed Log GS-100. Available online: https://www.furuno.com/en/merchant/speedlog/ (accessed on 6 August 2021).
- IMO. Resolution MSC.192(79) Adoption of the Revised Performance Standards for Radar Equipment; IMO: London, UK, 2004. [Google Scholar]
- IMO. Resolution A.1106(29) Revised Guidelines for the Onboard Operational Use of Shipborne Automatic Identification Systems (AIS); IMO: London, UK, 2015. [Google Scholar]
- Jan, S.S.; Tao, A.L. Comprehensive comparisons of satellite data, signals, and measurements between the BeiDou Navigation Satellite System and the Global Positioning System. Sensors 2016, 16, 689. [Google Scholar] [CrossRef] [Green Version]
- VesselFinder. Vessel Database. 2021. Available online: https://www.vesselfinder.com/vessels/ (accessed on 6 August 2021).
- IMO. Resolution MSC.246(83) Adoption of Performance Standards for Survival Craft AIS Search and Rescue Transmitters (AIS-SART) for Use in Search and Rescue Operations; IMO: London, UK, 2007. [Google Scholar]
- Ramırez, T.; Mosquera, C. Full-Duplex Operation in Two-Way Broadcast Service for Maritime Applications. Available online: http://gpsc.uvigo.es/sites/default/files/publications/1570268703.pdf (accessed on 6 August 2021).
- IMO. MSC/Circ.603 Annex 2 Guidelines on Display Sizes and Techniques for Navigational Purposes; IMO: London, UK, 1993. [Google Scholar]
- ISO. ISO 10596:2009—Ships and Marine Technology—Marine Wind Vane and Anemometers; ISO: Geneva, Switzerland, 2009. [Google Scholar]
- IMO. Resolution MSC.128(75) Performance Standards for a Bridge Navigational Watch Alarm System (BNWAS); IMO: London, UK, 2002. [Google Scholar]
- IMO. MSC/Circ.982 Guidelines on Ergonomic Criteria for Bridge Equipment and Layout; IMO: London, UK, 2000. [Google Scholar]
- Raytheon. Autopilot Override NFU Tiller. 2007. Available online: https://www.raytheon-anschuetz.com/fileadmin/content/Operation_Manuals/Steering_Control_NautoSteer/3432_Autopilot_Override_NFU-Tiller.pdf (accessed on 6 August 2021).
- IMO. Resolution MSC.232(82) Adoption of the Revised Performance Standards for Electronic Chart Display and Information Systems (ECDIS); IMO: London, UK, 2006. [Google Scholar]
- IMO. Resolution A.224(VII) as Amended by Annex 4 to res. MSC.74(69) Recommendation on Performance Standards for Echo-Sounding Equipment; IMO: London, UK, 1998. [Google Scholar]
- IMO. Resolution MSC.74(69) Adoption of New and Amended Performance Standards, Annex 4 Recommendation on Performance Standards for Echo-sounding Equipment; IMO: London, UK, 1998. [Google Scholar]
- IMO. Resolution MSC.112(73) Revised Recommendation on Performance Standards for Shipborne Global Positioning System (GPS) Receiver Equipment; IMO: London, UK, 2000. [Google Scholar]
- NCO. In Space Segment; 2021. Available online: https://www.gps.gov/systems/gps/space (accessed on 6 August 2021).
- Jin, M.H.; Han, Y.H.; Choi, H.H.; Park, C.; Heo, M.B.; Lee, S.J. GPS spoofing signal detection and compensation method in DGPS reference station. In Proceedings of the 2011 11th International Conference on Control, Automation and Systems, Gyeonggi-do, Korea, 26–29 October 2011; pp. 1616–1619. [Google Scholar]
- IMO. Resolution MSC.115(73) Adoption of Revised Recommendation on Performance Standards for Shipborne Combined GPS/GLONASS Receiver Equipment; IMO: London, UK, 2000. [Google Scholar]
- GPS Navigator JLR-8600/8400 | JRC (Japan Radio Co., Ltd.). Available online: http://www.jrc.co.jp/eng/product/lineup/jlr8600_8400/index.html (accessed on 27 October 2021).
- European GNSS Agency. What Is SBAS? 2020. Available online: https://www.gsa.europa.eu/european-gnss/what-gnss/what-sbas (accessed on 6 August 2021).
- IMO. Resolution A.819(19) Recommendation on Performance Standards for Shipborne Global Positioning System (GPS) Receiver Equipment; IMO: London, UK, 1995. [Google Scholar]
- IMO. MSC.74(69) Adoption of New and Amended Performance Standards, Annex 1 Recommendation on Performance Standards for Shipborne Combined GPS/GLONASS Receiver Equipment; IMO: London, UK, 1998. [Google Scholar]
- Simrad. Gyro Compass. Available online: https://www.navico-commercial.com/simradcommercial/gyrocompass/ (accessed on 4 October 2021).
- IMO. Resolution A.424(XI) Recommendation on Performance Standard for Gyro-Compasses; IMO: London, UK, 1979. [Google Scholar]
- IMO. Resolution A.342(IX) as Amended by MSC.64(67) Annex 3—Recommendation on Performance Standards for Heading Control Systems; IMO: London, UK, 1996. [Google Scholar]
- IMO. SOLAS Chapter V Safety of Navigation, Regulation 19 Carriage Requirements for Shipborne Navigational Systems and Equipment; IMO: London, UK, 2020. [Google Scholar]
- IMO. Resolution A.382(X) Magnetic Compasses Carriage and Performance Standards; IMO: London, UK, 1977. [Google Scholar]
- Kongsberg. K-Bridge MFD. Available online: https://www.kongsberg.com/globalassets/maritime/km-products/product-documents/k-bridge-multifunctional-operator-stations (accessed on 6 August 2021).
- IMO. MSC.1/Circ.1403/Rev.1 Amendments to the Revised NAVTEX Manual—Sections 7 to 15; IMO: London, UK, 2016. [Google Scholar]
- IMO. Resolution A.823(19) Performance Standards for Automatic Radar Plotting Aids (ARPA); IMO: London, UK, 2004. [Google Scholar]
- IMO. Resolution A.526(13) Performance Standards for Rate-of Turn Indicators; IMO: London, UK, 1983. [Google Scholar]
- IMO. Resolution MSC.96(72) Adoption of Amendments to Performance Standards for Devices to Measure and Indicate Speed and Distance; IMO: London, UK, 2000. [Google Scholar]
- IMO. Resolution MSC.86(70) Annex 1 Recommendation on Performance Standards for Sound Reception Systems; IMO: London, UK, 1998. [Google Scholar]
- China Classification Society. N-03 Steering Gear Control Systems. 2015. Available online: https://www.ccs.org.cn/ccswz/file/download?fileid=201900004000003738 (accessed on 6 August 2021).
- Simrad. NF80 Non Follow Up Remote. Available online: https://www.navico-commercial.com/simradcommercial/remote-controls/nf80-simrad-nfu-steering-lever/ (accessed on 6 August 2021).
- IMO. MSC.74(69) Adoption of New and Amended Performance Standards, Annex 2 Recommendation on Performance Standards for Track Control Systems; IMO: London, UK, 1998. [Google Scholar]
- IMO. Resolution MSC.116(73) Recommendation on pErformance Standards for Marine Transmitting Heading Devices (THDs); IMO: London, UK, 2000. [Google Scholar]
- ISO. ISO 22090-1 Ships and Marine Technology—Transmitting Heading Devices (THDs); ISO: Geneva, Switzerland, 2014. [Google Scholar]
- IEC. IEC 61162-1 Maritime Navigation and Radiocommunication Equipment and Systems—Digital Interfaces—Part 1: Single Talker and Multiple Listeners; IEC: Geneva, Switzerland, 2016. [Google Scholar]
- IEC. IEC 61162-3 Maritime Navigation and Radiocommunication Equipment and Systems—Digital Interfaces—Part 3: Serial Data Instrument Network; IEC: Geneva, Switzerland, 2008. [Google Scholar]
- Oyunchimeg, B.; Jeong, J.S.; Park, G.K. State-of-the-art IVEF Service based on e-Navigation System. J. Korean Inst. Intell. Syst. 2013, 23, 577–582. [Google Scholar] [CrossRef] [Green Version]
- IALA. Open IVEF. Available online: http://openivef.org/ (accessed on 6 August 2021).
- IALA. Open IVEF Contributers. Available online: http://openivef.org/?page_id=58 (accessed on 6 August 2021).
- Al-Khalidi, M.; Al-Zaidi, R.; Woods, J.; Reed, M.; Pereira, E. Securing Marine Data Networks in an IoT Environment. In Proceedings of the 2019 7th International Conference on Future Internet of Things and Cloud (FiCloud), Istanbul, Turkey, 26–28 August 2019; pp. 125–132. [Google Scholar] [CrossRef] [Green Version]
- Ifrim, C.; Iuga, I.; Pop, F.; Wallace, M.; Poulopoulos, V. Data Reduction Techniques Applied on Automatic Identification System Data. In Semantic Keyword-Based Search on Structured Data Sources; Szymański, J., Velegrakis, Y., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 14–19. [Google Scholar] [CrossRef]
- Chen, Y. Satellite-based AIS and its Comparison with LRIT. Trans. Nav, Int. J. Mar. Navig. Saf. Sea Transp. 2014, 8, 183–187. [Google Scholar] [CrossRef]
- Em-Trak. A200 AIS Class A/Inland Transceiver. Available online: https://em-trak.com/wp-content/uploads/em-trak-A200-user-manual-EN-v5.pdf (accessed on 6 August 2021).
- IMO. MSC.1/Circ.1473 Policy on Use of AIS Aids to Navigation; IMO: London, UK, 2014. [Google Scholar]
- IMO. SN.1/Circ.289 Guidance on the Use of AIS Application-Specific Messages—Introduction & Sections 1–10; IMO: London, UK, 2010. [Google Scholar]
- IMO. SN.1/Circ.290 Guidance for the Presentation and Display of AIS Application-Specific Messages; IMO: London, UK, 2010. [Google Scholar]
- IMO. SN.1/Circ.289 Guidance on the Use of AIS Application-Specific Messages—Sections 11–14; IMO: London, UK, 2010. [Google Scholar]
- IMO. Resolution MSC.114(73) Adoption of Revised Recommendation on Performance Standards for Shipborne DGPS and DGLONASS Maritime Radio Beacon Receiver Equipment; IMO: London, UK, 2000. [Google Scholar]
- ITU. Frequency Bands Allocated to Terrestrial Broadcasting Services. Available online: https://www.itu.int/en/ITU-R/terrestrial/broadcast/Pages/Bands.aspx (accessed on 6 August 2021).
- IMO. MSC.1/Circ.1403/Rev.1 Amendments to the Revised NAVTEX manual—Introductory Text, Contents, Foreword and Sections 1–6; IMO: London, UK, 2016. [Google Scholar]
- Furuno. Furuno AIS FA-170 Brochure. Available online: https://www.furuno.com/files/Brochure/305/upload/FA-170_E.pdf (accessed on 6 August 2021).
- IMO. SN/Circ.227 Guidelines for the Installation of a Shipborne Automatic Identification System (AIS); IMO: London, UK, 2003. [Google Scholar]
- Transas. Transas Pilot Pro User Manual. 2018. Available online: https://cdn.wartsila.com/docs/default-source/marine-documents/transas/pilotpro/transas-pilot-user-manual.pdf?sfvrsn=766be44_8 (accessed on 6 August 2021).
- Furuno. Furuno GNSS GP-170. Available online: https://www.furuno.com/en/merchant/gnss/ (accessed on 6 August 2021).
- Kongsberg. K-Bridge BNWAS. Available online: https://www.kongsberg.com/contentassets/bcc9bb3cb37a4564b7bed81afc8fe740/357863.pdf (accessed on 6 August 2021).
- Svilicic, B.; Rudan, I.; Frančić, V.; Mohović, D. Towards a Cyber Secure Shipboard Radar. J. Navig. 2020, 73, 547–558. [Google Scholar] [CrossRef]
- Svilicic, B.; Kamahara, J.; Celic, J.; Bolmsten, J. Assessing ship cyber risks: A framework and case study of ECDIS security. WMU J. Marit. Aff. 2019, 18, 509–520. [Google Scholar] [CrossRef]
- Svilicic, B.; Kamahara, J.; Rooks, M.; Yano, Y. Maritime Cyber Risk Management: An Experimental Ship Assessment. J. Navig. 2019, 72, 1108–1120. [Google Scholar] [CrossRef]
- Felski, A.; Zwolak, K. The Ocean-Going Autonomous Ship—Challenges and Threats. J. Mar. Sci. Eng. 2020, 8, 411. [Google Scholar] [CrossRef] [Green Version]
- Cairns, W.R. AIS and Long Range Identification & Tracking. J. Navig. 2005, 58, 181–189. [Google Scholar] [CrossRef]
- NIST. Cyber Ranges. 2010. Available online: https://www.nist.gov/system/files/documents/2018/02/13/cyber_ranges.pdf (accessed on 6 August 2021).
- Kavallieratos, G.; Katsikas, S.K.; Gkioulos, V. Towards a Cyber-Physical Range. In Proceedings of the 5th on Cyber-Physical System Security Workshop, Auckland, New Zealand, 8 July 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 25–34. [Google Scholar] [CrossRef]
- IHO. S-100 Universal Hydrographic Data Model. Available online: https://iho.int/en/s-100-universal-hydrographic-data-model (accessed on 6 August 2021).
- VESA. About VESA. Available online: https://vesa.org/about-vesa/ (accessed on 6 August 2021).
- VESA. VESA Flat Display Mounting Interface Standard (for Flat Panel Monitors/Displays/Flat TVs). 2006. Available online: https://www.maxrev.de/files/2011/09/fdmiv1r1.pdf (accessed on 6 August 2021).
- BIC. Combined Data Plate. Available online: https://www.bic-code.org/csc-plate/ (accessed on 6 August 2021).
- ISO. ISO 17894: Ships and Marine Technology—Computer Applications—General Principles for the Development and Use of Programmable Electronic Systems in Marine Applications; ISO: Geneva, Switzerland, 2005. [Google Scholar]
- Sawahashi, M.; Kishiyama, Y.; Taoka, H.; Tanno, M.; Nakamura, T. Broadband radio access: LTE and LTE-advanced. In Proceedings of the 2009 International Symposium on Intelligent Signal Processing and Communication Systems (ISPACS), Kanazawa, Japan, 7–9 January 2009; pp. 224–227. [Google Scholar] [CrossRef]
- Intel. Understanding the Advantages of 5G. Available online: https://www.intel.com/content/www/us/en/wireless-network/5g-benefits-features.html (accessed on 6 August 2021).
- Komplett. VRinsight Ship Console. Available online: https://www.komplett.no/product/1149724/gaming/gaming-utstyr/spillkontrollere/simulator/vrinsight-ship-console (accessed on 6 August 2021).
- Elo Touch. 2244L Open Frame Touchscreen. Available online: https://www.elotouch.com/2244l.html (accessed on 6 August 2021).
- GitHub. Bill of Materials. 2018. Available online: https://github.com/tcstratmann/MobileBridge/blob/master/BOM.md (accessed on 6 August 2021).
- Neousys Technology. Nuvo-3000E/P Series. Available online: https://www.neousys-tech.com/Resource/Product_Document/Nuvo-3000/Nuvo-3000EP_Datasheet.pdf (accessed on 6 August 2021).
- Nisbet, A.; Lawrence, S.; Ruff, M. A forensic analysis and comparison of Solid State Drive data retention with trim enabled file systems. In Proceedings of the 11th Australian Digital Forensics Conference, Perth, Australia, 2–4 December 2013. [Google Scholar] [CrossRef]
- dSpace. MicroAutoBox II Embedded PC. Available online: https://www.dspace.com/en/pub/home/products/hw/micautob/microautobox_embedded_pc.cfm (accessed on 6 August 2021).
- Simrad. SIMRAD Broadband 4G Radar. Available online: https://www.simrad-yachting.com/nb-no/simrad/type/radar/simrad-4g-bb-radar-kit/ (accessed on 6 August 2021).
- Bottomline Marine. SIMRAD AIS Class B NAIS-400. Available online: https://www.bottomlinemarine.com/prod_cat/P_simrad–lowrance-marine-ais-class-b-nais400–transmitreceiver-00010980001_3281.shtml (accessed on 6 August 2021).
- Thakur, D. What Is Network Switch?—Definition. Available online: https://ecomputernotes.com/computernetworkingnotes/computer-network/network-switch (accessed on 6 August 2021).
- OpenCPN. About OpenCPN. Available online: https://opencpn.org/OpenCPN/info/about.html (accessed on 6 August 2021).
- SourceForge. Open Nautical Charts. Available online: https://sourceforge.net/projects/opennautical/ (accessed on 4 October 2021).
- RabbitMQ. RabbitMQ Homepage. Available online: https://www.rabbitmq.com/ (accessed on 6 August 2021).
- Bridge Command. Home. Available online: https://www.bridgecommand.co.uk/ (accessed on 6 August 2021).
- GitHub. Virtual Handles. 2017. Available online: https://github.com/tcstratmann/VirtualHandles (accessed on 6 August 2021).
- GitHub. Mobile Bridge—A Portable Design Simulator for Ship Bridge Interfaces. 2018. Available online: https://github.com/tcstratmann/MobileBridge (accessed on 6 August 2021).
- Orocos. The Orocos Toolchain. Available online: https://www.orocos.org/toolchain.html (accessed on 6 August 2021).
- MathWorks. Simulink. Available online: https://www.mathworks.com/help/simulink/ (accessed on 6 August 2021).
- MathWorkds. Simulink Real-Time. Available online: https://www.mathworks.com/products/simulink-real-time.html (accessed on 6 August 2021).
- OFFIS. CASCaS. Available online: https://hcd.offis.de/wordpress/?page_id=16 (accessed on 6 August 2021).
- Wortelen, B.; van Göns, C. Automatic creation of a HLA simulation infrastructure for simulation-based UI evaluation in Rapid UI Prototyping Processes. In Proceedings of the ACHI 2015: The Eighth International Conference on Advances in Computer-Human Interactions, Lisbon, Portugal, 22–27 February 2015. [Google Scholar]
- Unreal Engine. Unreal Engine. Available online: https://www.unrealengine.com/en-US/ (accessed on 6 August 2021).
- Schaefer, R.; Wesuls, J.H.; Köckritz, O.; Korte, H.; Windeck, K.J. A mobile manoeuvring simulation system for design, verification and validation of marine automation Systems. IFAC-PapersOnLine 2018, 51, 195–200. [Google Scholar] [CrossRef]
- GitHub. NMEA Simulator. Available online: https://github.com/panaaj/nmeasimulator (accessed on 4 October 2021).
- Sailsoft. NemaStudio. Available online: https://www.sailsoft.nl/ais_simulator.html (accessed on 4 October 2021).
- GitHub. GitHub—AIS BlackToolkit. Available online: https://github.com/trendmicro/ais (accessed on 27 October 2021).
- Kystverket. Access to AIS Data. Available online: https://www.kystverket.no/en/navigation-and-monitoring/ais/access-to-ais-data/ (accessed on 27 October 2021).
- Command, B. Re: OpenCPN Plugin for Bridge Command Use. 2021. Available online: https://www.bridgecommand.co.uk/forum/index.php/topic,2874.msg18058.html#msg18058 (accessed on 4 October 2021).
- OPNET. OPNET Network Simulator. Available online: https://opnetprojects.com/opnet-network-simulator/ (accessed on 4 October 2021).
- Lee, S.H.; Kim, J.H.; Moon, K.D.; Lee, K.; Park, J.H. Performance analysis on integrated ship area network. J. Korean Inst. Commun. Inf. Sci. 2013, 38, 247–253. [Google Scholar]
- Parmar, A.; Pattani, K.M. Sniffing GSM traffic using RTL-SDR and kali linux OS. Int. Res. J. Eng. Technol. 2017, 4, 1637–1642. [Google Scholar]
- Wireshark. Wireshark· Go Deep. Available online: https://www.wireshark.org/ (accessed on 4 October 2021).
- Selvam, N.; Scott, R.; DeWitt, C. Use of a cybersecurity laboratory in support of the virtual vessel concept to increase safety onboard marine and offshore assets. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 1–4 May 2017. [Google Scholar]
- Basterretxea-Iribar, I.; Sotés, I.; Uriarte, J.I. Towards an Improvement of Magnetic Compass Accuracy and Adjustment. J. Navig. 2016, 69, 1325–1340. [Google Scholar] [CrossRef]

| No | Title | Ref. | Year | Type |
|---|---|---|---|---|
| 1 | A generic testbed for simulation and physical based testing of maritime cyber-physical system of systems | [23] | 2019 | C |
| 2 | A study on the verification of collision avoidance support system in real voyages | [24] | 2015 | C |
| 3 | Comparing simulation with physical verification and validation in a maritime test field | [25] | 2020 | J |
| 4 | eMaritime integrated reference platform | [26] | 2016 | C |
| 5 | HAGGIS: A modelling and simulation platform for e-maritime technology assessment | [27] | 2014 | C |
| 6 | LABSKAUS—A physical platform for e-maritime technology assessment | [28] | 2014 | C |
| 7 | Learning from automotive: Testing maritime assistance systems up to autonomous vessels | [29] | 2017 | C |
| 8 | Mobile Bridge—A portable design simulator for ship bridge interfaces | [8] | 2018 | J |
| 9 | Physical testbed for highly automated and autonomous vessels | [30] | 2017 | C |
| 10 | Save maritime systems testbed | [31] | 2014 | J |
| 11 | Simulation environment for risk assessment of e-navigation systems | [32] | 2015 | C |
| 12 | Test bed for safety assessment of new e-navigation systems | [33] | 2014 | J |
| 13 | Testbed architecture for maritime cyber physical systems | [34] | 2017 | C |
| 14 | Testbeds for verification and validation of maritime safety | [35] | 2016 | C |
| 15 | Vessel-in-the-loop architecture for testing highly automated maritime systems | [36] | 2018 | C |
| 16 | Virtual test bed for maritime safety assessment | [37] | 2015 | J |
| Equipment | Alternative Name | IMO Document | Paragraph or Appendix |
|---|---|---|---|
| Anemometer | Wind direction and velocity indicator | MSC/Circ.982 MSC.252(83) | Appendix 2 7.5.2.1 |
| Automatic Identification System (AIS) | - | SOLAS Ch. V/19 MSC/Circ.982 MSC.252(83) | 2.4 Appendix 2 3.5.1 |
| Bridge Navigational Watch Alarm System (BNWAS) | - | SOLAS Ch. V/19 MSC/Circ.982 MSC.252(83) | 2.2.3 Appendix 2 20.5.1 |
| Central Alert Management Human Machine Interface (HMI) | Alarm indicators Alert management | MSC/Circ.982 MSC.252(83) | Appendix 2 From 18 to 26 |
| Controls for main engine (M/E) | - | MSC/Circ.982 | Appendix 2 |
| Controls for main rudder | Steering lever/wheel | MSC/Circ.982 | Appendix 2 |
| Controls for thruster | - | MSC/Circ.982 | Appendix 2 |
| Echo-sounder | Echo-sounding equipment | SOLAS Ch. V/19 MSC/Circ.982 MSC.252(83) | 2.3.1 Appendix 2 3.5.1 |
| Electronic Chart Display and Information System (ECDIS) | Chart display | SOLAS Ch. V/19 MSC/Circ.982 MSC.252(83) | 2.10 Appendix 2 3.5.1 |
| Global Positioning System (GPS) | Electronic Position Fixing System (EPFS) | SOLAS Ch. V/19 MSC/Circ.982 MSC.252(83) | 2.1.6 Appendix 2 3.5.1 |
| Gyro compass | - | SOLAS Ch. V/19 MSC/Circ.982 | 2.5.1 Appendix 2 |
| Heading Control System (HCS) | Autopilot | MSC/Circ.982 MSC.252(83) | Appendix 2 3.5.1 |
| Indicators | - | MSC/Circ.982 | Appendix 2 |
| Magnetic compass | - | SOLAS Ch. V/19 MSC/Circ.982 | 2.1.1 Appendix 2 |
| Multifunctional Display (MFD) | - | MSC.252(83) | Appendix 1 |
| NAVigational TEleX (NAVTEX) | - | MSC/Circ.982 MSC.252(83) | Appendix 2 3.5.1 |
| RAdio Detection And Ranging (RADAR) | - | SOLAS Ch. V/19 MSC/Circ.982 MSC.252(83) | 2.7.1 Appendix 2 3.5.1 |
| Rate of Turn Indicator (ROTI) | - | SOLAS Ch. V/19 MSC/Circ.982 | 2.9.1 Appendix 2 |
| Rudder pump selector switch | - | MSC/Circ.982 | Appendix 2 |
| Sound reception system | - | SOLAS Ch. V/19 MSC/Circ.982 | 2.1.8 Appendix 2 |
| Speed and Distance Measuring Equipment (SDME) | Speed and Distance Measuring Device (SDMD) Speed Log | SOLAS Ch. V/19 MSC.252(83) | 2.9.2 3.5.1 |
| Steering mode selector switch | - | MSC/Circ.982 | Appendix 2 |
| Steering position selector switch | - | MSC/Circ.982 | Appendix 2 |
| Track Control System (TCS) | Autopilot | MSC/Circ.982 MSC.252(83) | Appendix 2 3.5.1 |
| Transmitting Heading Device (THD) | - | SOLAS Ch. V/19 | 2.3.5 |
| Equipment | AIS | GPS | Gyro Compass | Magnetic Compass | ROTI | SDME | THD |
|---|---|---|---|---|---|---|---|
| AIS | → | △ | → | △ | |||
| ECDIS | → | △ | → | ⊕ | |||
| Gyro Compass | → | ||||||
| HCS | △ | ⊥ | △ | ⊥ | |||
| RADAR | → | → | △ | → | △ | ||
| TCS | → | → | → | ||||
| THD | △ | △ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oruc, A.; Gkioulos, V.; Katsikas, S. Towards a Cyber-Physical Range for the Integrated Navigation System (INS). J. Mar. Sci. Eng. 2022, 10, 107. https://doi.org/10.3390/jmse10010107
Oruc A, Gkioulos V, Katsikas S. Towards a Cyber-Physical Range for the Integrated Navigation System (INS). Journal of Marine Science and Engineering. 2022; 10(1):107. https://doi.org/10.3390/jmse10010107
Chicago/Turabian StyleOruc, Aybars, Vasileios Gkioulos, and Sokratis Katsikas. 2022. "Towards a Cyber-Physical Range for the Integrated Navigation System (INS)" Journal of Marine Science and Engineering 10, no. 1: 107. https://doi.org/10.3390/jmse10010107
APA StyleOruc, A., Gkioulos, V., & Katsikas, S. (2022). Towards a Cyber-Physical Range for the Integrated Navigation System (INS). Journal of Marine Science and Engineering, 10(1), 107. https://doi.org/10.3390/jmse10010107