2.1. Ship Dynamics Coupled with Unsteady Flapping-Foil Thruster
We consider a self-propelled ship traveling at constant forward speed
U in waves propagating at an angle
β with respect to the ship longitudinal axis, where
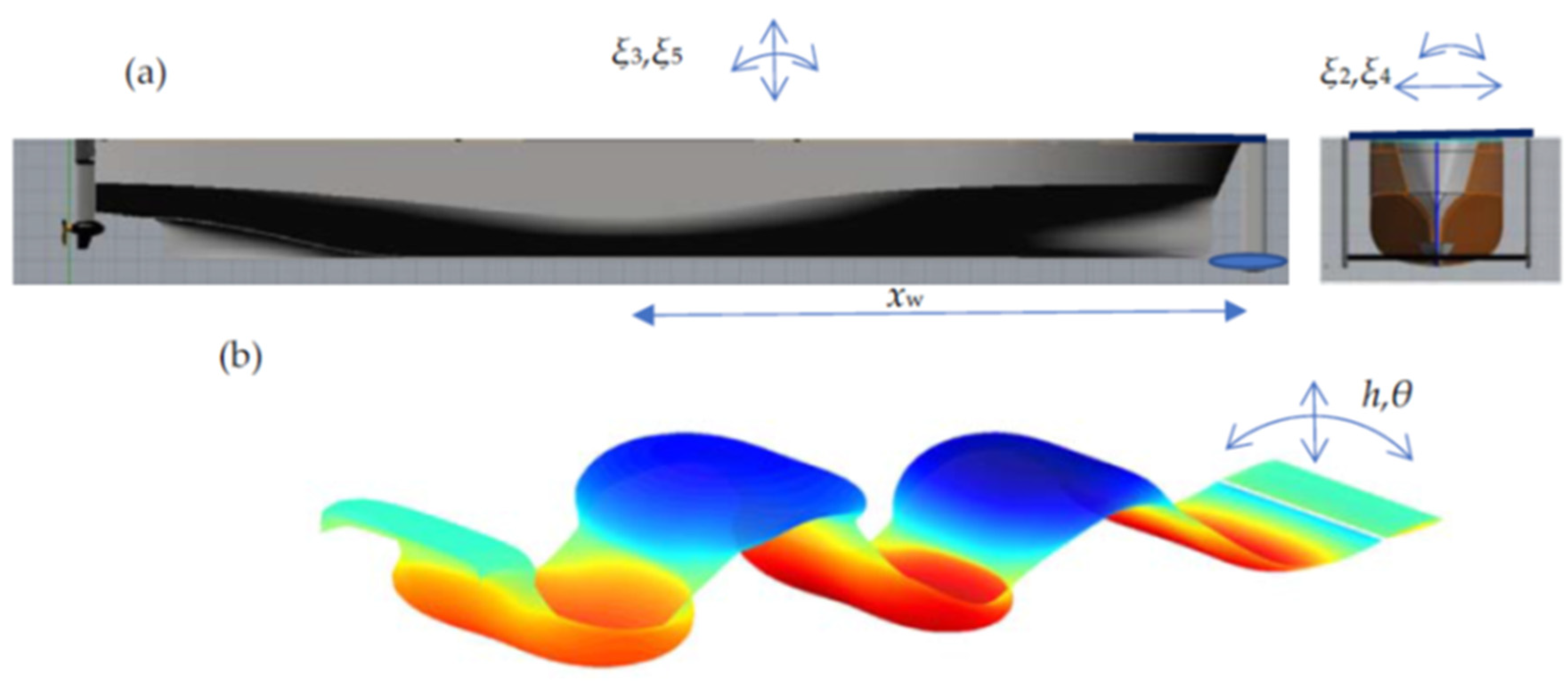
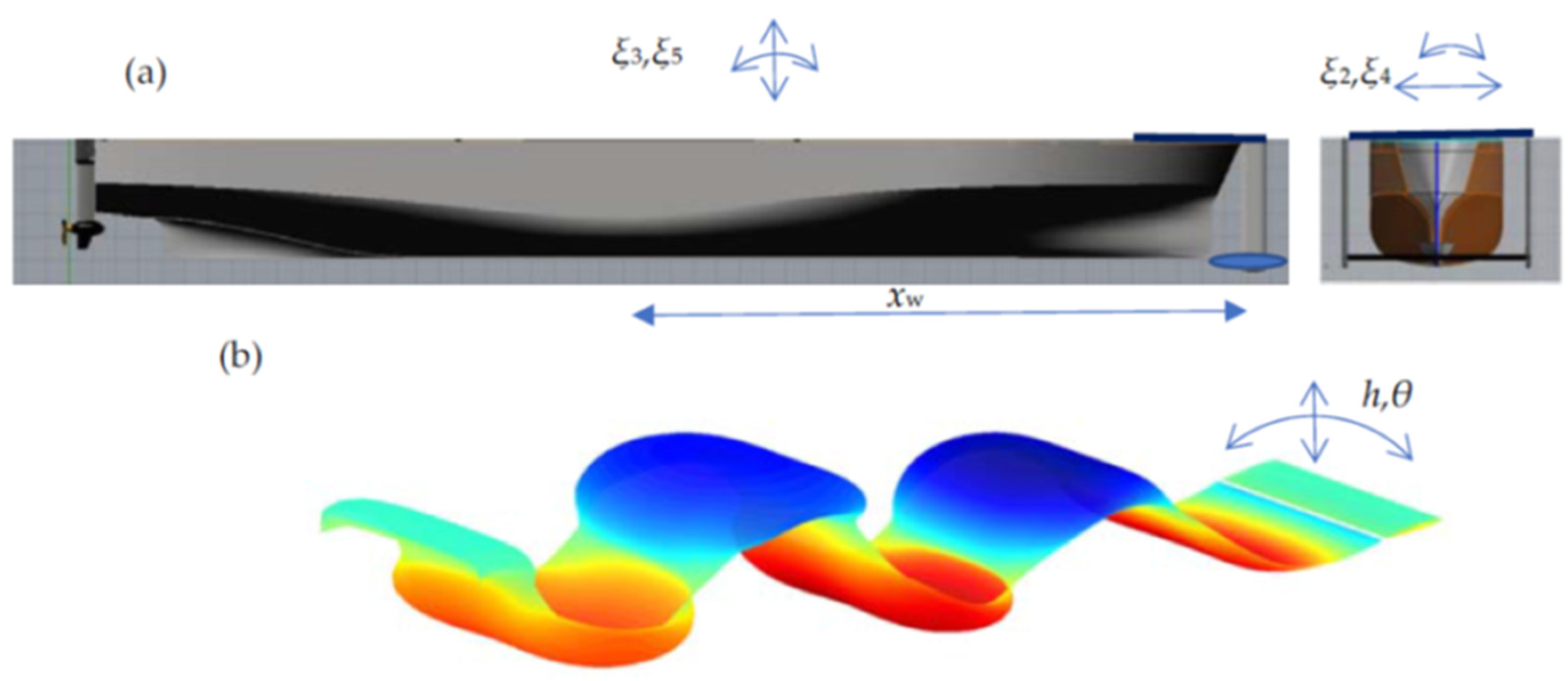
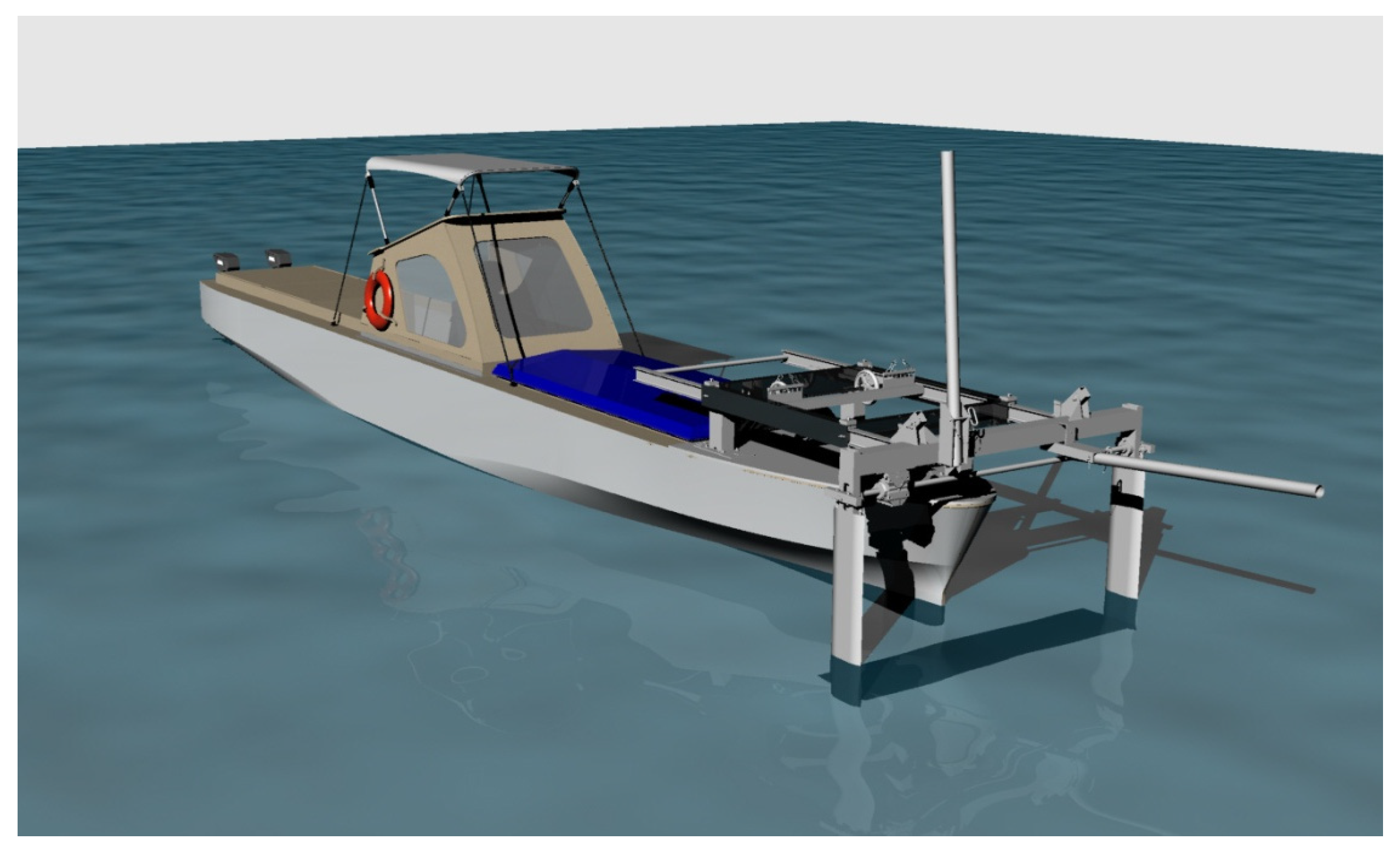
β = 180 deg corresponds to head incident waves. The ship is equipped with a dynamic wing arranged at the bow, as shown in
Figure 1, which takes energy from the wave-induced ship responses. By enforcing a self-pitching motion controlled by a suitably designed system, it operates as a flapping thruster augmenting ship propulsion in moderate and more severe sea conditions.
We consider small-amplitude incident waves and ship responses, permitting application of the standard seakeeping model in the frequency domain to calculate the coupled heaving (
) and pitching (
) motion of the system (ship and foil) in the vertical plane, and the corresponding sway (
) and roll (
) transverse motion responses; see [
3]. The flapping thruster is arranged at a forward station (
xw) at the ship bow, and its vertical motion
h is defined from the ship heave
, pitch
and roll
responses, as follows:
where
is the vertical oscillation of the wing midchord section,
denotes the longitudinal position of the wing axis of rotation and
the transverse coordinate along the wingspan.
The dynamic wing is put in a flapping thruster mode by dynamically controlling its self-pitching motion denoted by
θ. Following standard seakeeping analysis in deep-water harmonic waves, the dynamics of the system on the vertical and transverse plane, respectively, are described as follows (see [
3,
10,
11]):
where
are the complex amplitudes of ship swaying, heaving, rolling and pitching oscillations. In the present work, the effect of the swaying and rolling motion on the foil generation loads
has been considered very small in comparison with the Froude–Krylov and diffraction component and has been approximately neglected. The coefficients
are defined as follows:
where
and
, are the added mass and damping coefficients,
are components of the mass-inertia matrix of the system (ship and wing),
denotes the matrix of hydrostatic coefficients and
are Coriolis terms; see, e.g., Refs. [
6,
7]. Furthermore, the encounter frequency is
where
is the wavenumber of the incident waves and
is the absolute wave frequency. Moreover,
denote the Froude–Krylov and diffraction wave loads, respectively. In the above model, the coupling with the flapping thruster dynamics is achieved through the terms
which are complex amplitudes of excitation due to the wing, and are functions of heaving-pitching
and swaying-rolling
responses of the ship. The vertical force and moment consist of two parts:
dependent on the oscillatory ship responses and on the incident wave field
, where Λ is a constant coefficient involving the incoming wave height and period; see [
3] for details concerning the definition of the above quantities.
In the sequel, we will briefly describe the approach that is used in order to analyze the wing forces and moments using the unsteady thin hydrofoil theory. Beginning with the kinematics of the flapping foil, the effective angle of attack is approximately given by
where
denotes the angle of the self-pitching motion of the foil. In Equation (7), the effect of wing’s vertical oscillation on the angle of attack is
, where
denotes the oscillatory motion of the ship at its centerplane and at the longitudinal position
of the foil; see
Figure 1. For small vertical oscillatory velocity compared to the ship’s speed, the following approximation can be used:
. The self-pitching motion is selected to be actively controlled by a simple proportional law based on the angle
, i.e.,
, where w stands for the control parameter. Thus, the following expression is obtained for the angle of attack of the incident flow on the foil sections:
Since, in the band of frequencies of interest, the wave field is a slowly varying quantity along the span of the foil, it is approximated by its value on the midchord plane, which in the considered arrangement is the centerplane of the ship. It is worth noticing here that the above set-up also includes the case of the bow wing operating in static mode
θ = const, which resembles the cases of hull vane and bow static wings that have also been found to be beneficial concerning resistance reduction of traveling ships; see e.g., [
12].
Assuming a relatively large aspect ratio of the flapping thruster, the unsteady lifting line theory is used to analyze foil excitation. Under the additional consideration of small and moderate Strouhal numbers,
and reduced frequency
, where
is the foil midchord length, the calculation of forces is based on spanwise integration of sectional lift forces and moments
as presented in detail in [
3,
7]. The above analysis also provides data concerning the variation to the system coefficients
in the left hand side of Equations (2)–(4) due to the operation of the flapping foil. Furthermore, expressions are obtained concerning the most significant incident wave-field-dependent foil forces
, as follows:
where
is the foil submergence depth and G is a factor defined from the geometrical parameters of the wing. More details concerning the modeling can be found in [
3], and its application in combination with BEM, including free-surface effects, in [
7] and validation by comparison to BEM and CFD in [
8].
2.2. Experimental Investigation of the Model
For the verification of the present method, a new ship model corresponding to a ferry hull of length between perpendiculars
LBP = 3.3 m, with main dimension ratio:
LBP/B = 7.67,
B/T = 3.3 and hull coefficients
Cb = 0.45,
Cwl = 0.73,
Cm = 0.82, has been designed, constructed and tested at the NTUA towing tank without and with the operation of a dynamically controllable flapping thruster arranged at the bow; see
Figure 1 and
Figure 2. The dimensions of the NTUA towing tank are: length 100 m, breadth 4.6 m and maximum depth 3 m. Moreover, the maximum carriage speed is 5 m/s. The model was made out of wood and prepared for testing at two selected drafts,
B/T = 3.18 and
B/T = 3.44. The foil is constructed by poly (vinyl chloride) (PVC), polished and painted. The foil planform shape is orthogonal; its span is
s = 0.50 m with a span to chord ratio of
s/
c = 4 and thus, its aspect ratio is
AR = 4 and the wing planform area is
Sw/
BT = 1.17. The foil sections are symmetrical NACA0012. The model is painted white and marked with the two waterlines used in the tests in order to provide a reference in the photographs; see
Figure 2.
Moreover, the center of flotation of the ship is LCF/L = −0.05 (aft midship) and the metacentric radius BML/L = 1.9. The vertical coordinate of the center of buoyancy is KB/L = 0.024 (from BL) and its longitudinal position LCB = −0.024 L. We consider that the ship trim and heel angle are zero and thus, the longitudinal center of gravity is the same as the center of buoyancy, i.e., XG/L = −0.024 (aft midship) and YG = 0. The vertical center of gravity is KG/T = 0.2(from BL). Furthermore, the longitudinal metacentric height is . Finally, the radii of gyration about the x-axis and y-axis, respectively, are taken Rxx/B = 0.25, Ryy/L = 0.2. The foil is located at a distance xwing/L = 0.5, with respect to the midship section, and vertically at a submergence depth d/T = 1.6.
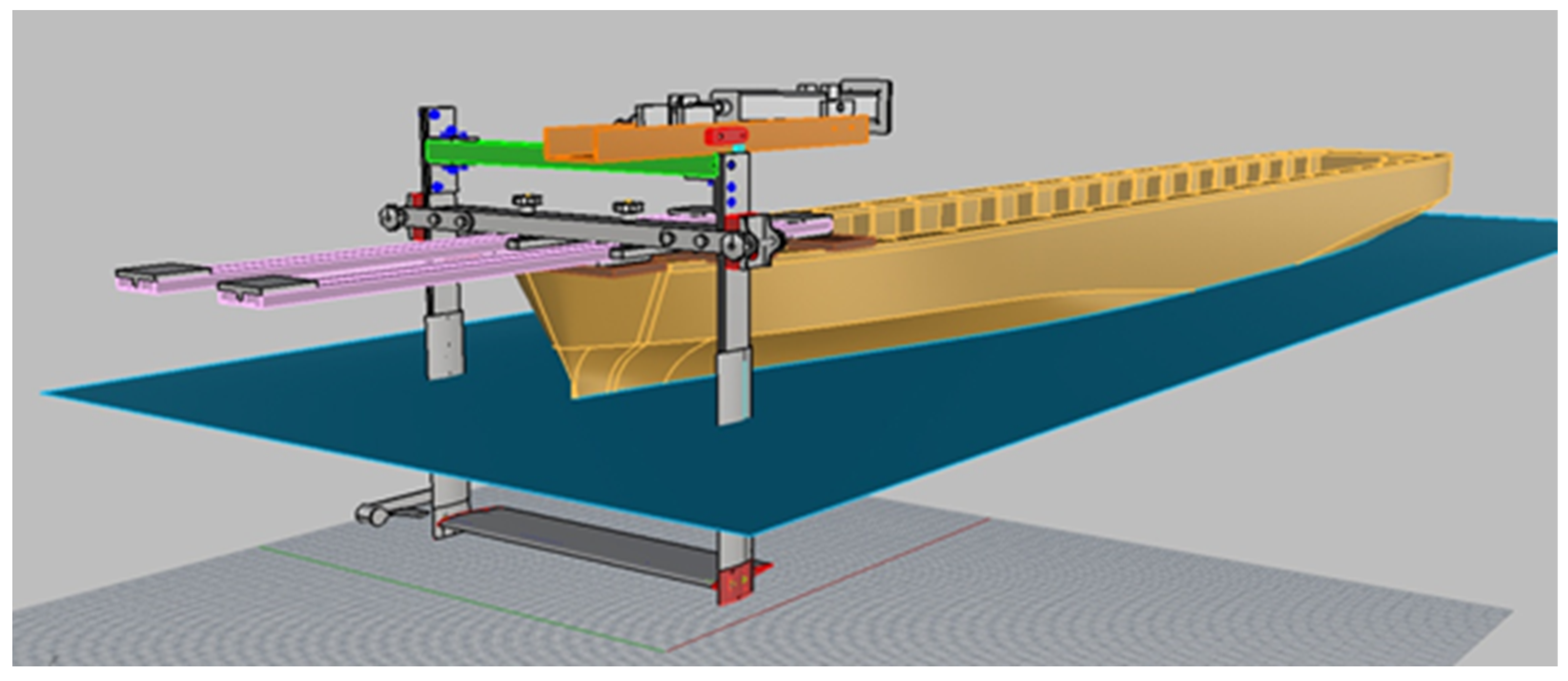
The model is tested without and with the operation of a biomimetic dynamic wing. The dynamic wing system is designed to be arranged at the bow of the ship, as shown in
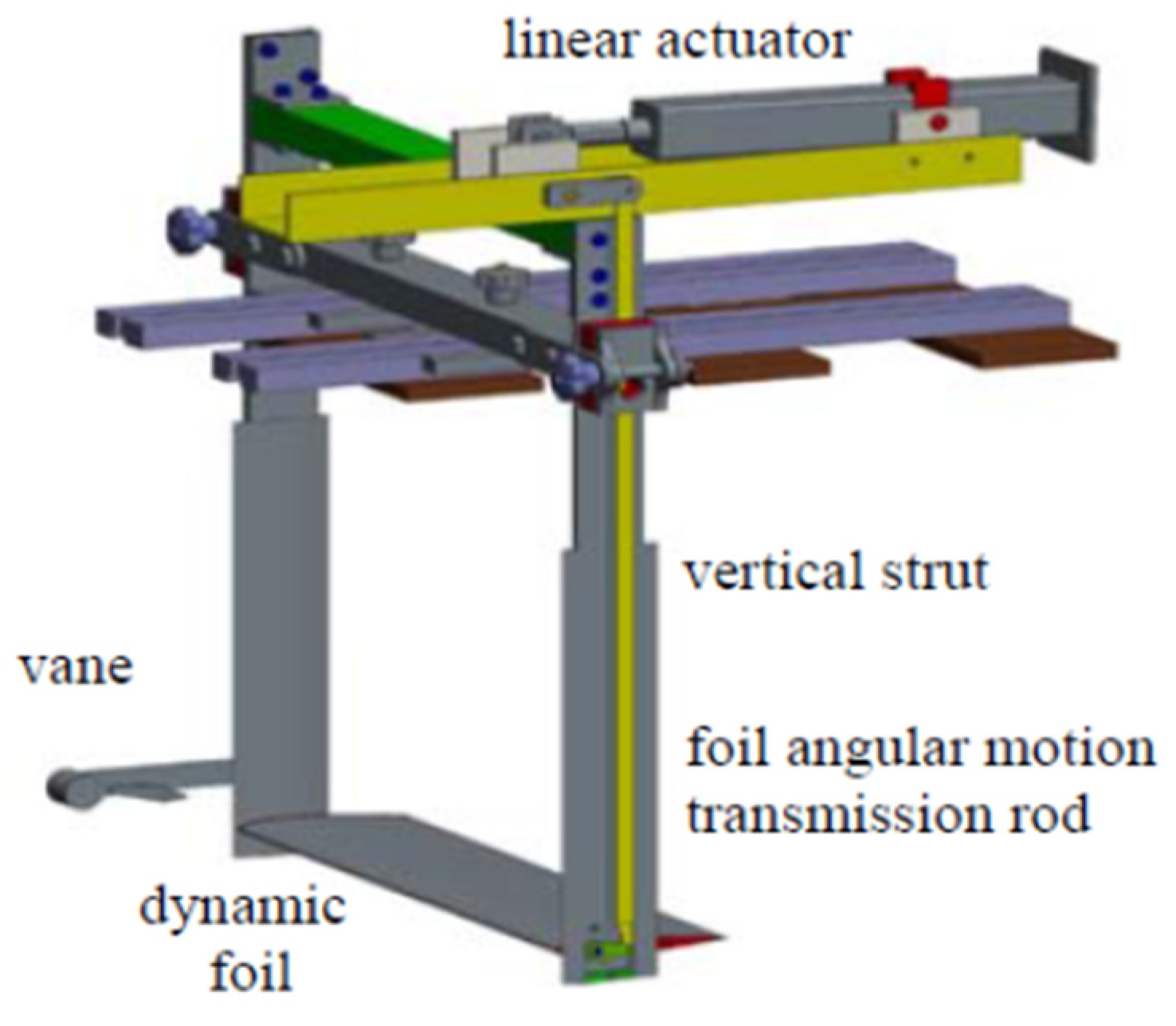
Figure 3. For the operation and powering of the flapping thruster a servo motor coupled to a linear actuator is used, as presented in
Figure 4. The pivot axis of the wing is located at its hydrodynamic center, and the power required for the dynamic pitching of the foil is found to be negligible compared with the effective horsepower associated with the resistance of the ship model. The angular oscillatory motion of the flapping foil is transmitted by means of two rods arranged inside the vertical struts that are used to support the system; see
Figure 4. The latter ensures that the motion is transmitted very accurately, as instructed by the control system.
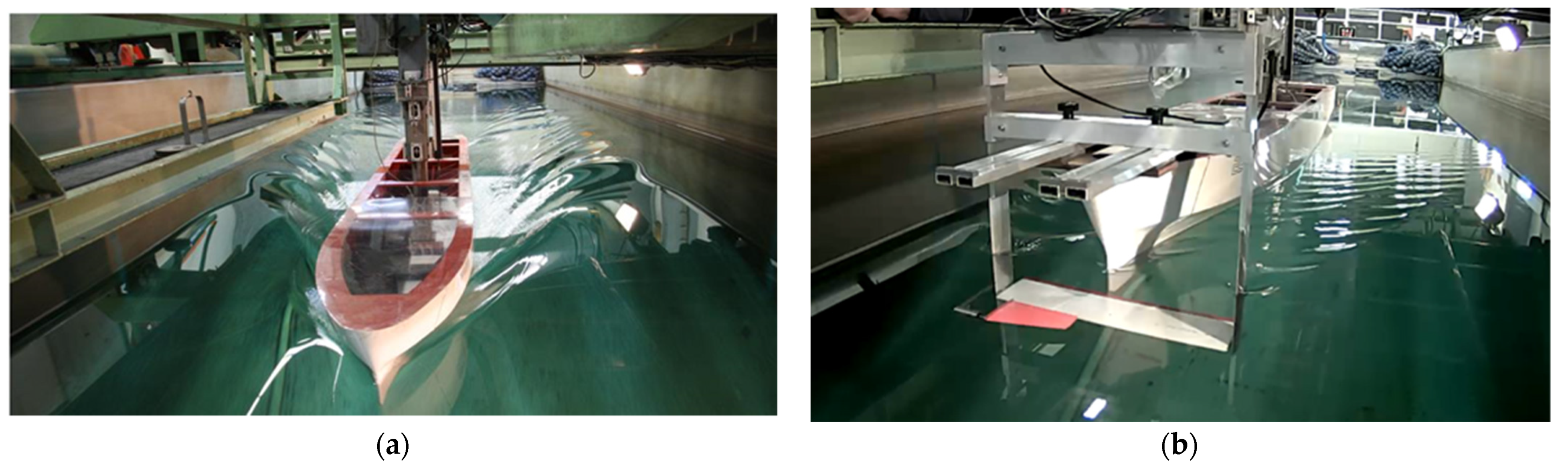
Using the above model, a series of experiments concerning calm water resistance at the specific drafts have been performed, as shown in
Figure 5. Moreover, tests in harmonic and irregular waves are performed, and the responses, including motions and total wave resistance, are measured, as shown in
Figure 6. It is worth mentioning here that the breadth of the model is less than 10% of the breadth of the tank, indicating that block effects are not important. Indicative results are reported below, demonstrating the performance of the examined system.
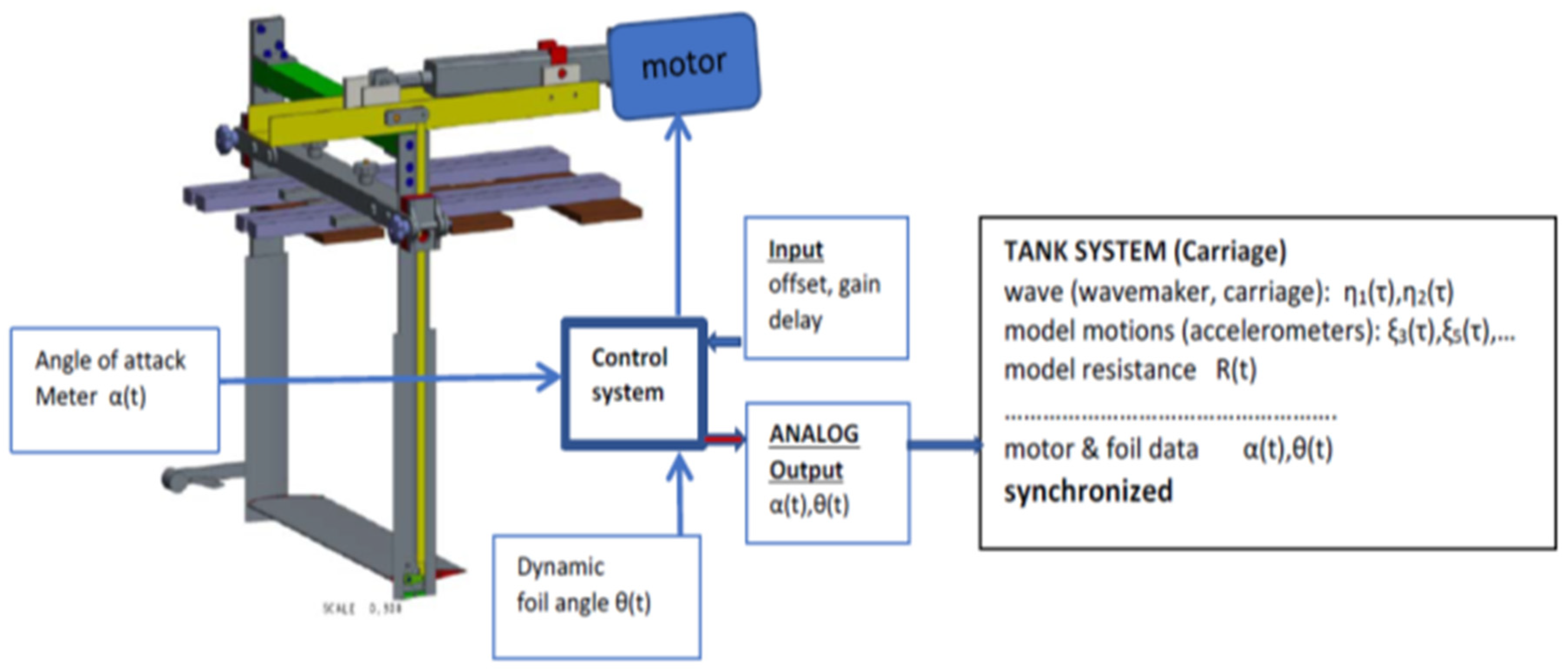
The control system (CS) setting the self-pitching motion of the foil is based on the reading of the angle of attack of the flow in front of the dynamic wing, using the angle of attack meter (vane) which is shown in
Figure 7.
The control system accepts the following input data: O = offset, G = gain, D = delay and performs the following functions:
- (a)
The dynamic angle of attack is measured using a potentiometer providing input α(t) to the CS.
- (b)
The foil angle is measured by using a potentiometer providing input θ(t) to the CS.
- (c)
The CS instructs the motor to rotate in order to force the linear actuator and rotate the crankshaft, oscillating the vertical rods and transmitting the angular motion
θ(
t) to the foil which is set equal to:
The output is synchronized with the towing tank acquisition system, providing simultaneous records of the following data for given tank carriage speed (model speed):
- (a)
Wave elevation from the wavemaker and near the tank carriage (near the vessel): η1(t), η2(t);
- (b)
Ship model motions (heave and pitch of the hull from tank accelerometers): ξ3(t), ξ5(t);
- (c)
The model resistance in the presence of waves with the dynamic foil in operation: R(t);
- (d)
The angle of attack α(t) and the foil angle θ(t).
The input signal from the angle of attack meter (vane) is low pass filtered as follows:
- -
0–6 Hz, Gain = 1/ripple 2.75 dB and
- -
18–104 Hz, Gain = 0/Actual attenuation −43 dB.
The sampling rate is set to 208 Hz.
The CS is a custom design board based on an ST microelectronics STM32F429 ARM mcu, running at 168 MHz. The firmware is based on FreeRTOS real-time operating system. The control board provides the following functions:
- -
Analog input for the AoA sensor. Oversampled at 2048 Hz and low pass filtered at 6 Hz.
- -
Digital serial output to Animatics/Moog brushless servo motor (actuator).
- -
5 × 12 bits spare analog outputs for monitoring.
- -
3 × 12 bits spare analog inputs for interfacing auxiliary sensors
- -
3D gyroscope and 3D accelerometer.
- -
3D magnetometer and pressure sensor.
- -
GNSS and WiFi/Bluetooth.
- -
GPRS/2 G/3 G.
- -
CAN Bus interface and uSD card for data acquisition.
The firmware implements various control and RTK kinematics algorithms such as:
- -
Quaternion estimation and Euler angles.
- -
Linear acceleration and speed.
- -
Assisted global positioning and real-time spectral analysis.
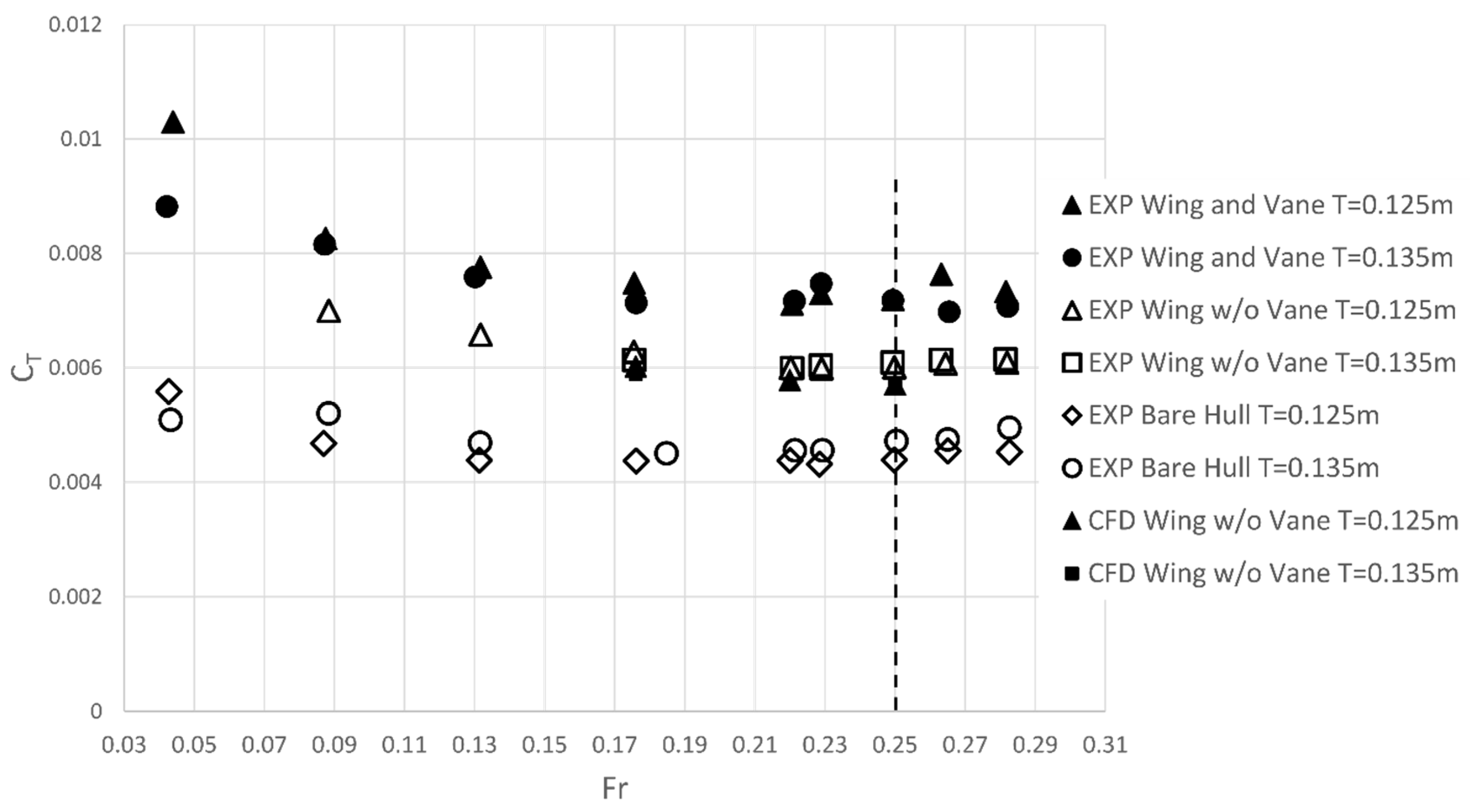
The calm water resistance of the model at the two drafts tested, without and with the flapping thruster, as depicted in
Figure 5 and
Figure 6, is measured and indicative results are shown in
Figure 8, where the total resistance coefficient
is plotted against the Froude number
. More specifically,
is the total resistance and
is the model towing speed,
ρ is the water density and
S denotes the wetted area of the ship model at each draft, respectively. The design speed corresponds to Froude number Fr = 0.25 indicated by a vertical dashed line in
Figure 8. In this condition, an increase of the calm water resistance of about 60% is observed due to the presence of the foil and the supporting system, including the two vertical struts and the vane. To quantify the increase in the total resistance due to the vane, additional experiments have been conducted without it. To supplement the measurements, numerical simulations using an in-house finite volume CFD solver (see
Section 3.2) are performed. The vane is also omitted from the numerical simulations in which the hull, wing and struts are modeled.
As indicated in
Figure 8, almost one third of the above increase in resistance is found to be due to the contribution of the vane. This is evident both in the measurements as well as in the numerical predictions, which are found to be in good agreement with the experimental data. Since the vane is used for the control of flapping thruster, it does not need to scale with the rest of the model. Consequently, the contribution of the vane to the total resistance is expected to be eliminated at larger scales, where the dimensions and size of the vane will remain of the same order, as in the tank experiments. The resistance due vane viscous losses become negligible in full-scale applications, for which an optimization procedure will be used for the design of the supporting struts and chord and span of the foil. The latter approach will minimize the combined drag, taking into account the required size and space for the transmission system, and will be the subject of subsequent work.
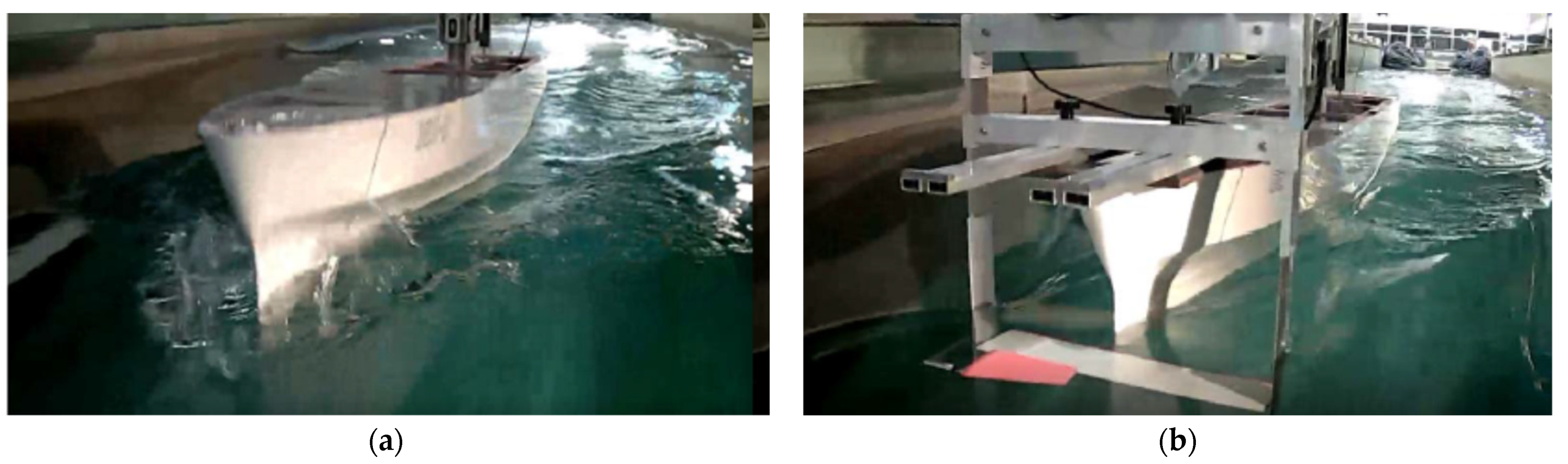
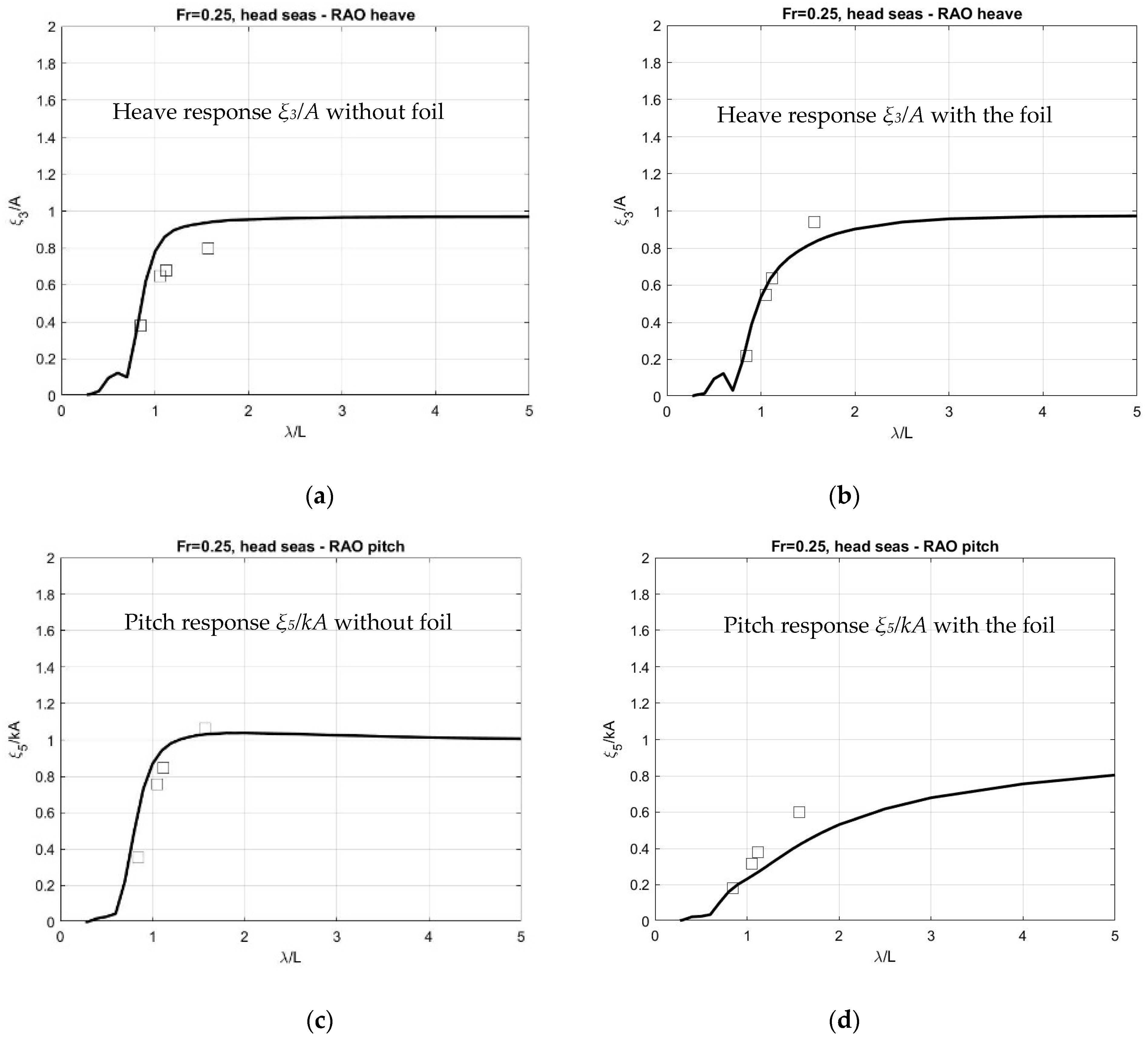
Measured data concerning the ship motion responses with and without the operation of the dynamic wing are shown in
Figure 9 in harmonic head waves, with and without the operation of the dynamic foil, for Froude number Fr = 0.25, and the smaller draft of the ship. In the same figure, the predictions obtained by the present numerical model are also plotted using lines.
It is observed that the operation of the foil leads to a significant reduction of ship hull motion responses, which is equivalent to a reduction of added wave resistance and an overall increase of propulsion performance in waves. This is also evident from the pictures in
Figure 6, which correspond to the same forward speed of the model at Fr = 0.25 and same head wave conditions. It is clearly observed that the motion responses are reduced at a great extent due to the operation of the foil. The same findings have also been observed in the case of the ship responses in irregular waves.
More details concerning the enhancement of the performance by the operation of the dynamic foil are provided in
Table 1. The table data are presented as obtained from the operation of the system in forward speed of the model at Fr = 0.25, in harmonic head incident waves of various frequencies around the resonance conditions for a given wave amplitude (
A/L = 1%). Each line provides the enhancement of propulsive performance for the corresponding value of the gain
G by the control system (with offset and delay set equal to zero).
The percentage of performance enhancement is calculated with respect to the total resistance of the ship without the dynamic wing traveling at the same speed in head waves of the same characteristics, which includes the calm water resistance and the added resistance due to the waves the at the same conditions. It is clearly observed that for an extended frequency band around the resonance conditions of the ship, a significant enhancement of performance is achieved. The latter could reach the level of 15–30%, with the larger values indicated in the column
Table 1 by using an asterisk, achieved if the penalty due to resistance increase by the vane is eliminated, as it is expected to happen at larger scales, and could be further optimized by the design of the supporting struts.
2.3. Modeling the Flapping Thruster Performance in Irregular Waves
Based on the data concerning the kinematics of the flapping thruster, as obtained from the seakeeping responses of the system, the performance of the system in random waves is calculated. For the studied ship speed, although the Froude number based on the length of the ship is , the corresponding one based on the root chord c of the foil is .
We consider irregular waves described by a frequency spectrum
in the earth-fixed frame of reference and thus, the spectrum in the frame of reference moving with the foil forward speed
is
Using the response amplitude operator concerning the vertical foil motion at the centerplane
at the position
xwing of the wing, we obtain the corresponding spectrum describing the foil vertical motion as
Next, the vertical motion of the flapping thruster is simulated by using the random-phase model by discretizing the encounter frequency band into a large number of bins of width
and the corresponding centers at discrete frequencies
, as follows:
where
are random phases uniformly distributed in
; see, e.g., refs. [
11,
13]. Moreover, the rotational motion of the flapping wing about its pivot axis is considered. The latter motion is defined to be negative in the clockwise direction, and the corresponding pivot point is located at a distance of
from the leading edge of the foil. Finally, the self-pitching motion of the foil is set by a using a proportional control law based on the velocity of its vertical oscillatory motion as
where
is the control parameter; see [
3,
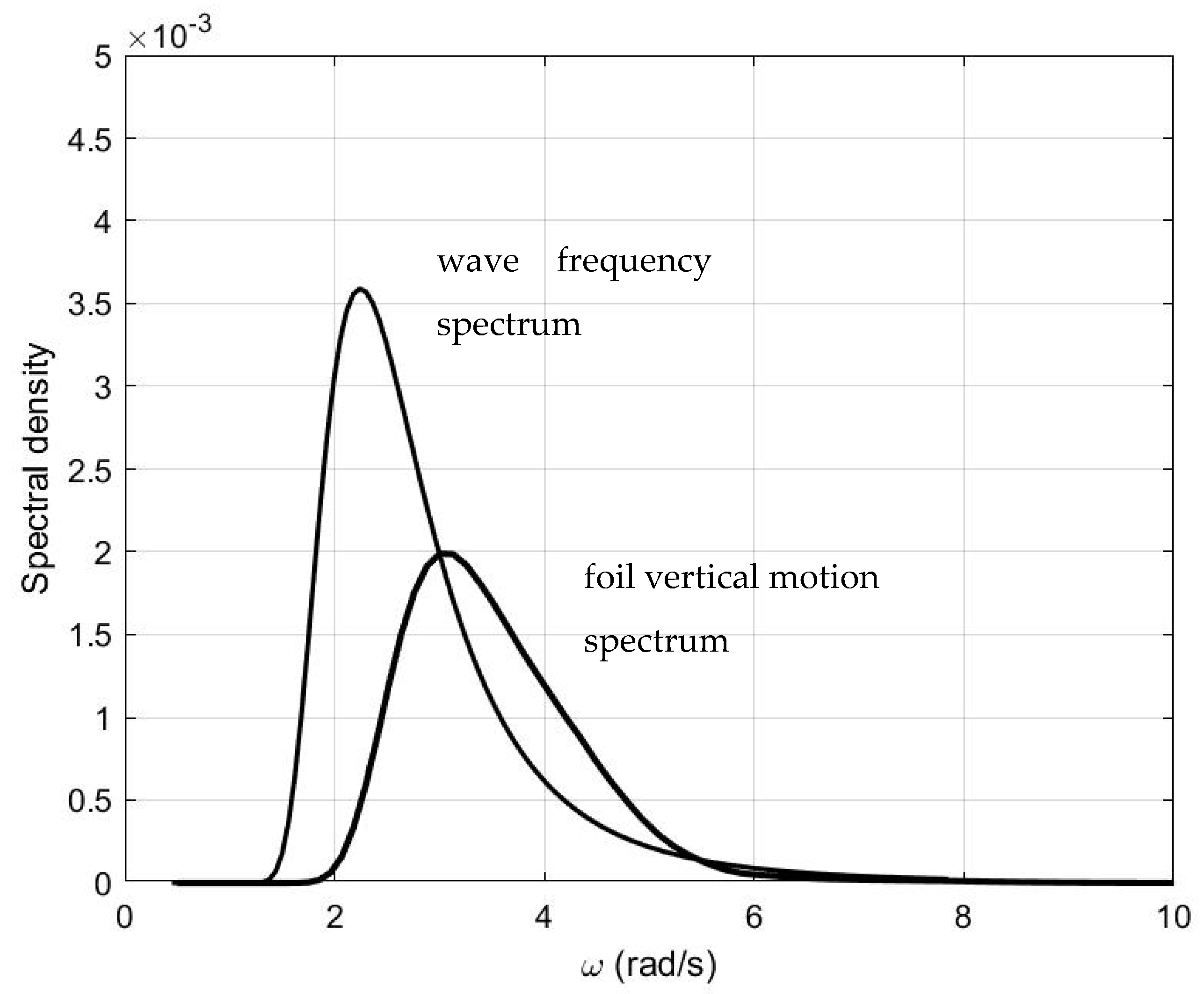
8]. The incident frequency spectrum is represented in the present work by using the Bretschneider model
as plotted in
Figure 10, for significant wave height
Hs/L = 0.03 and peak period
= 0.7, where it is also compared with the corresponding spectrum of foil vertical motion in the ship frame of reference traveling at Fr = 0.25 (solid line), in case of head incident waves (
β = 180°), as obtained from Equation (12) for head seas.
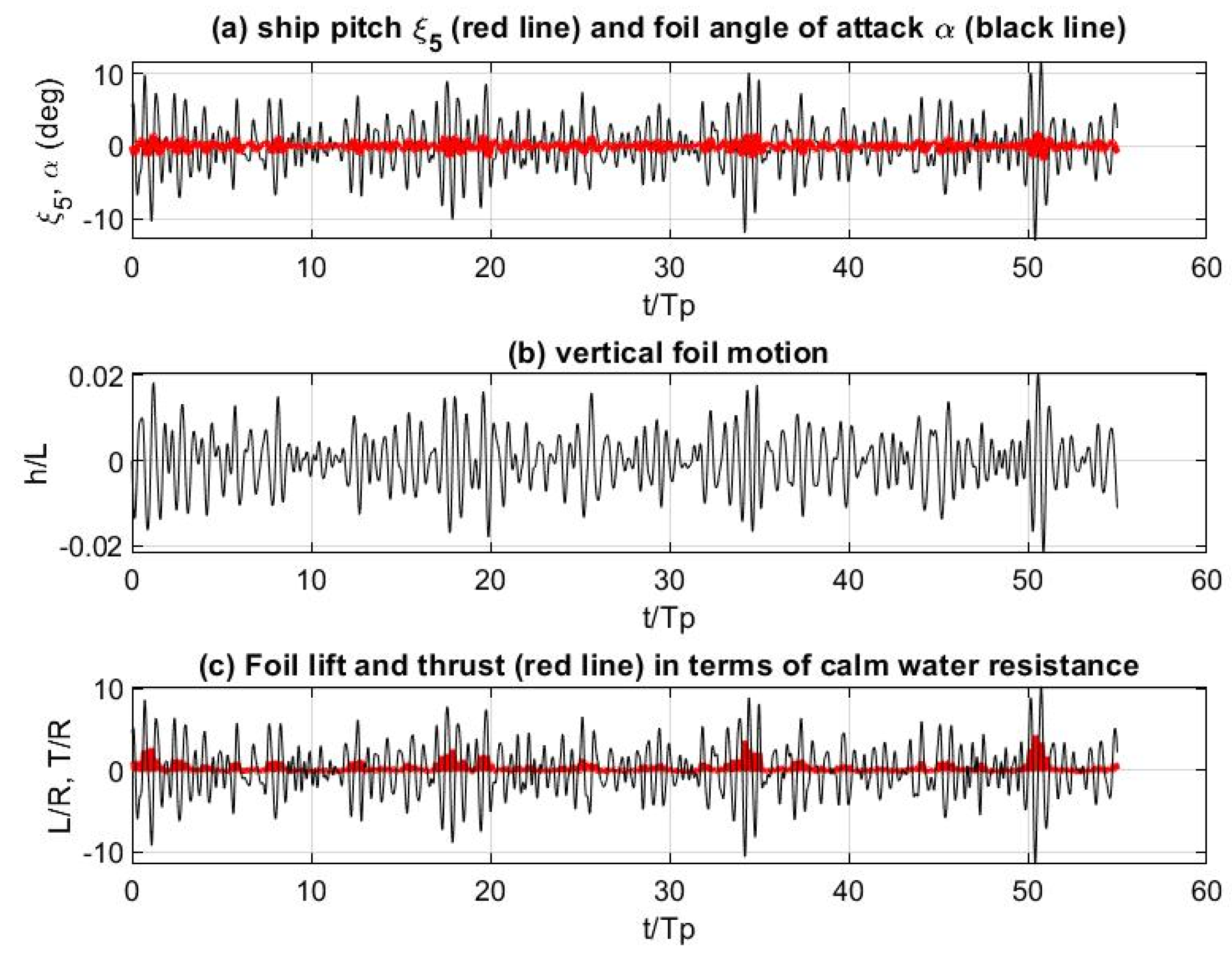
As an example of an application, in
Figure 11 and
Figure 12, selected results are presented in the case of the studied ferry ship model traveling at
with the operation of a flapping thruster at the bow, as schematically shown in
Figure 1, for wave direction
β = 180° (head waves) and
β = 150° (quartering seas). In the top subplot of
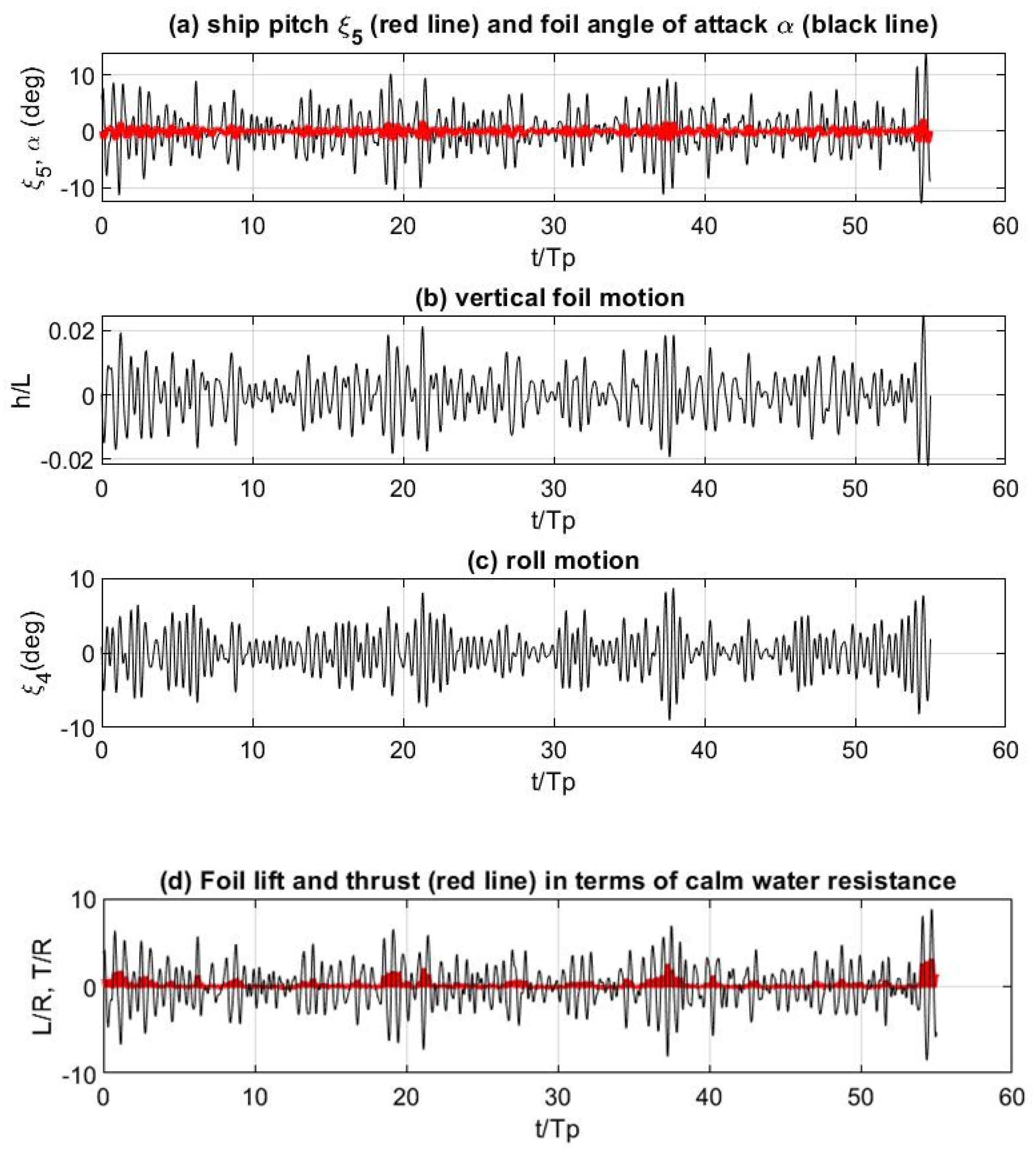
Figure 11, the ship pitching motion and the dynamic foil angle of attack in degrees are plotted, the latter being calculated by setting the self-pitching motion of the foil in proportionality with the angle of attack of the incident flow. In the middle subplot, the foil vertical motion is plotted normalized with the ship length, and in the lower subplot the dynamic foil lift force is shown by using a black line and the thrust force by a red line, respectively, both normalized with respect to the calm water resistance of the ship without foil. Similar results are plotted in
Figure 12 for the same configuration, but in obliquely incident waves (
β = 150°) corresponding to the same spectrum as before, where also in this case, roll motion is excited and its prediction by the present model is included in the third subplot of
Figure 12.
In the examined conditions, the long-term average thrust offered by the dynamic foil is found to be of the order of 15–25% of the calm water resistance of the bare hull at the same speed, with the higher value corresponding to head waves. It is estimated that almost half of the above gain is due to the reduction of ship responses from the stabilization offered by the dynamic wing and the respective drop of the added wave resistance, while the other half part is due to the development of thrust by the flapping thruster, which by the appropriate control is put in fish-propulsion mode.
The above results are exploited for the calibration and verification of the more accurate numerical BEM and CFD tools developed for the design and analysis of the studied system supporting calculation at larger model scales and finally for the full scale, and details will be presented in the next sections.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}