
Experimental Investigation of the Performance of a Tuned Heave Plate Energy Harvesting System for a Semi-Submersible Platform

Abstract
:1. Introduction
2. The Model of the Tuned Heave Plate Energy Harvesting System
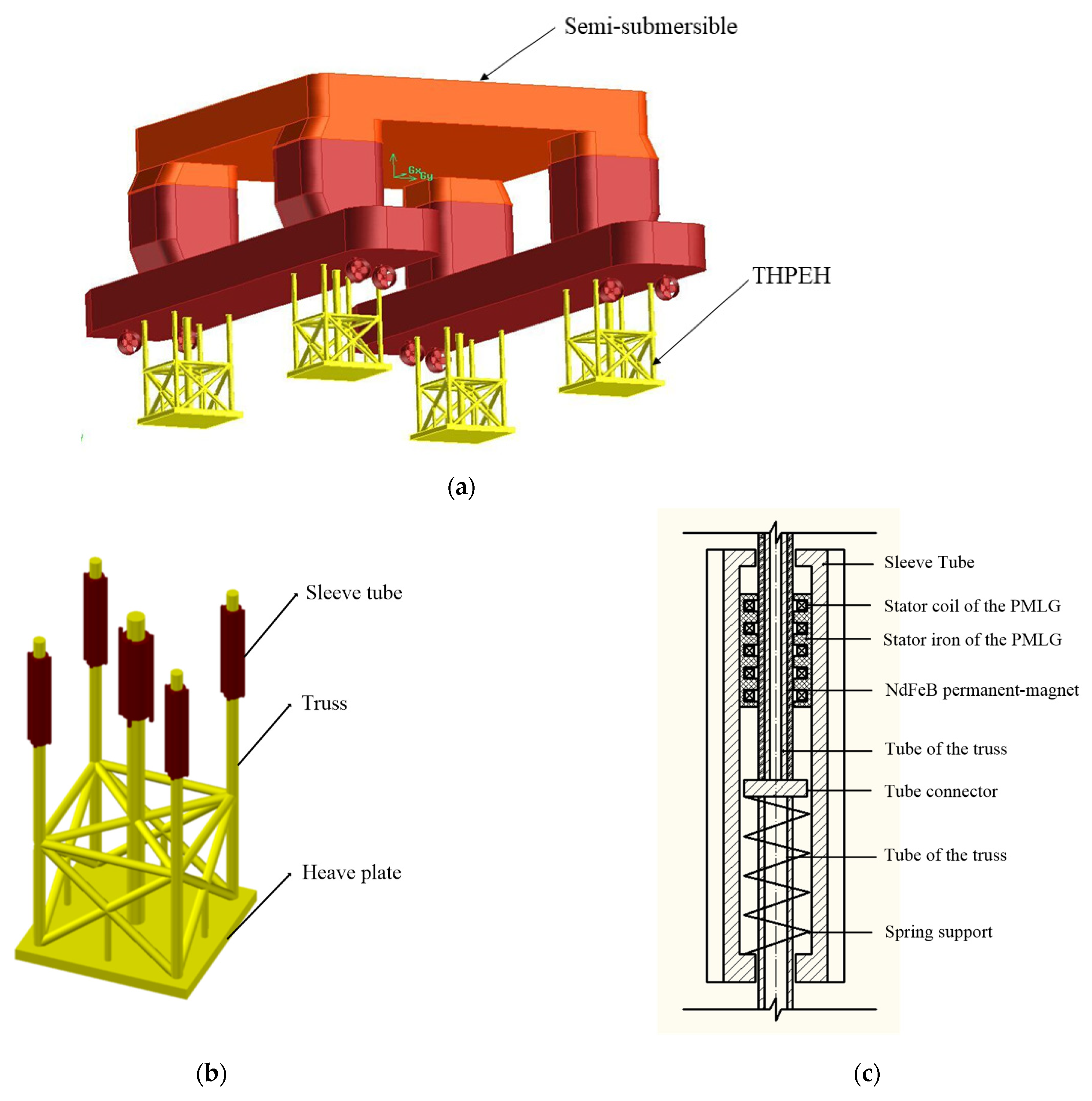
2.1. Conceptual Design of the Tuned Heave Plate Energy Harvesting System
2.2. Mathematical Model of the Tuned Heave Plate System
3. Experiments
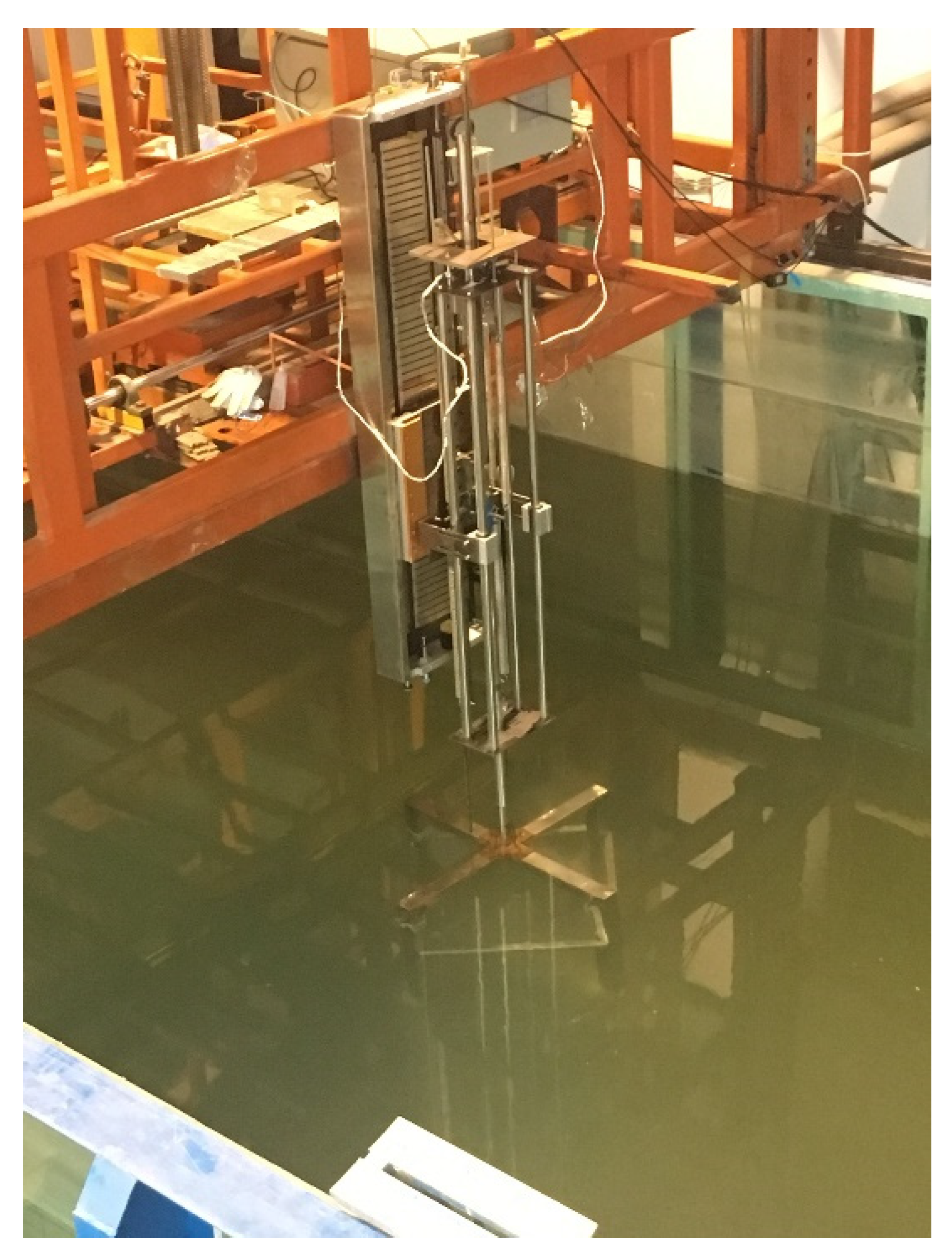
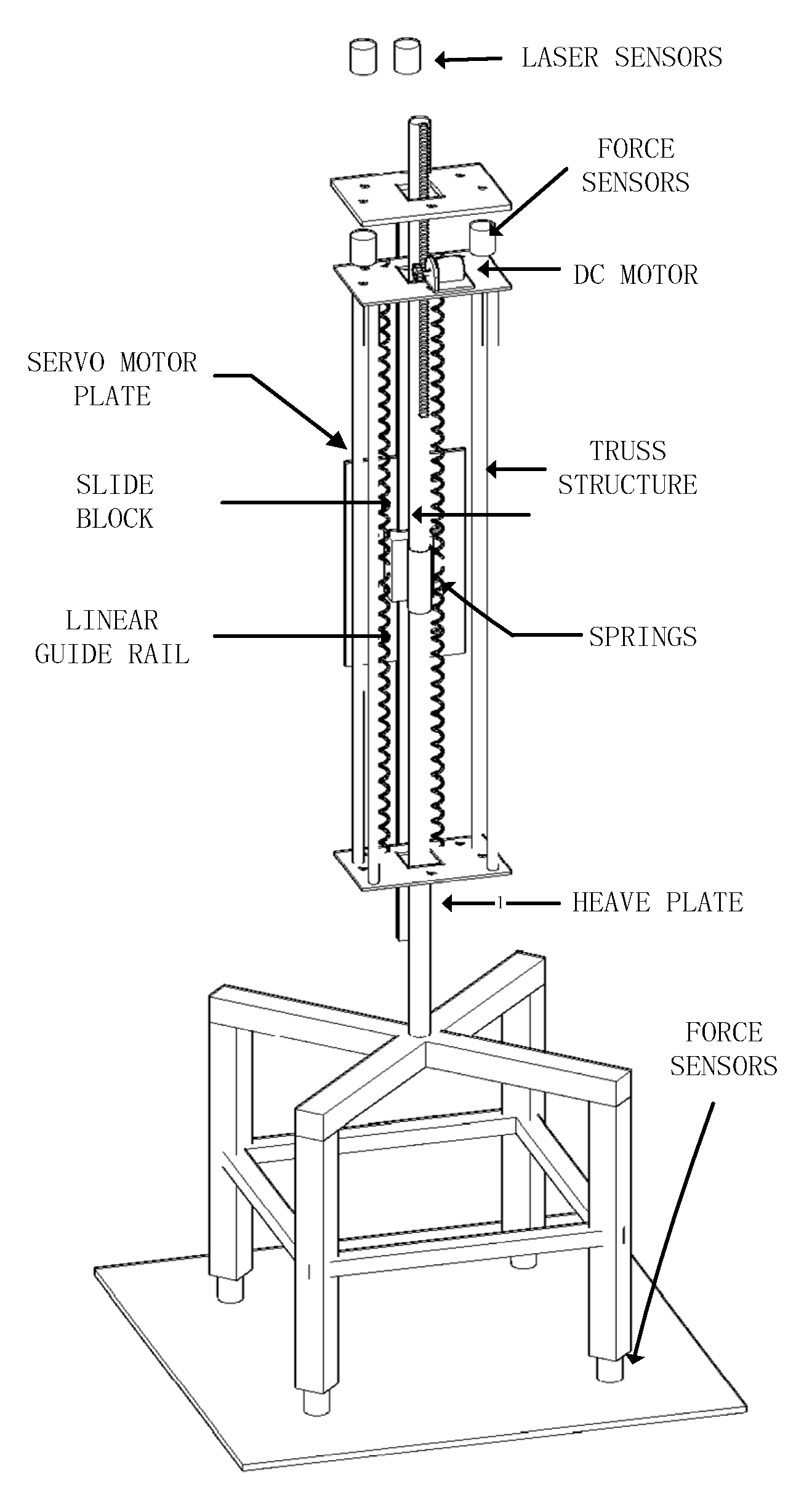
3.1. Setup of the Heave Plate Experiment
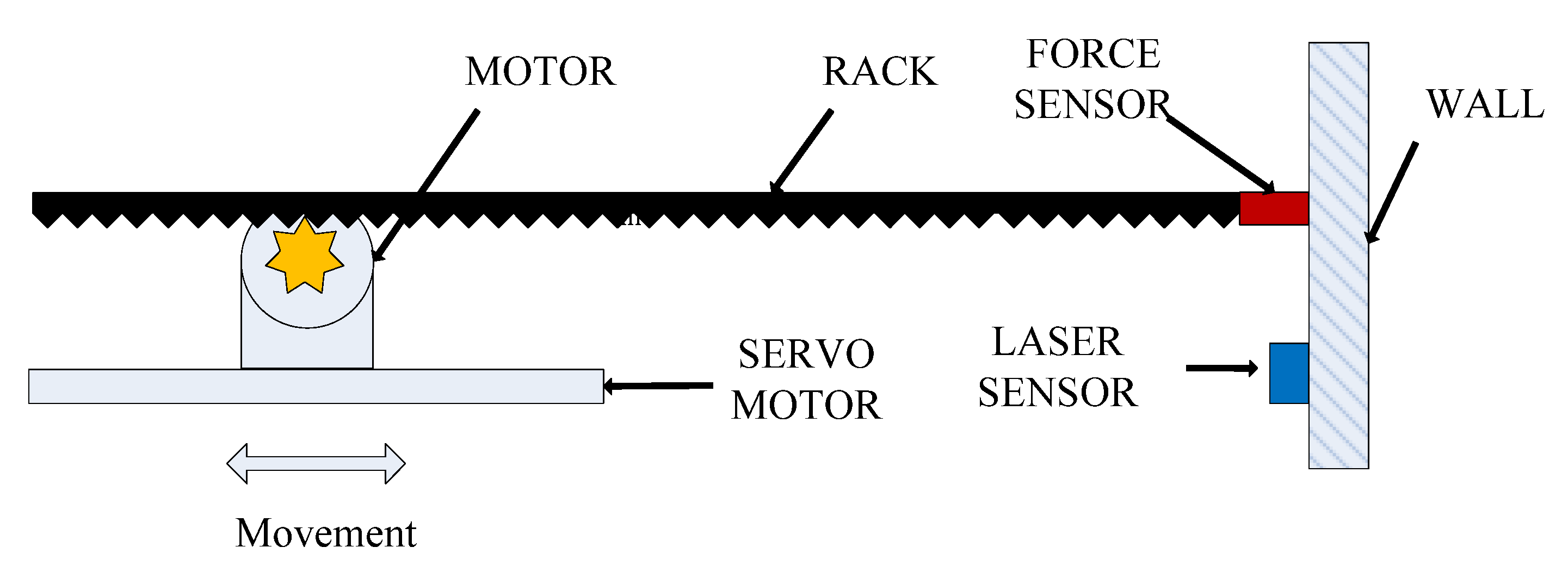
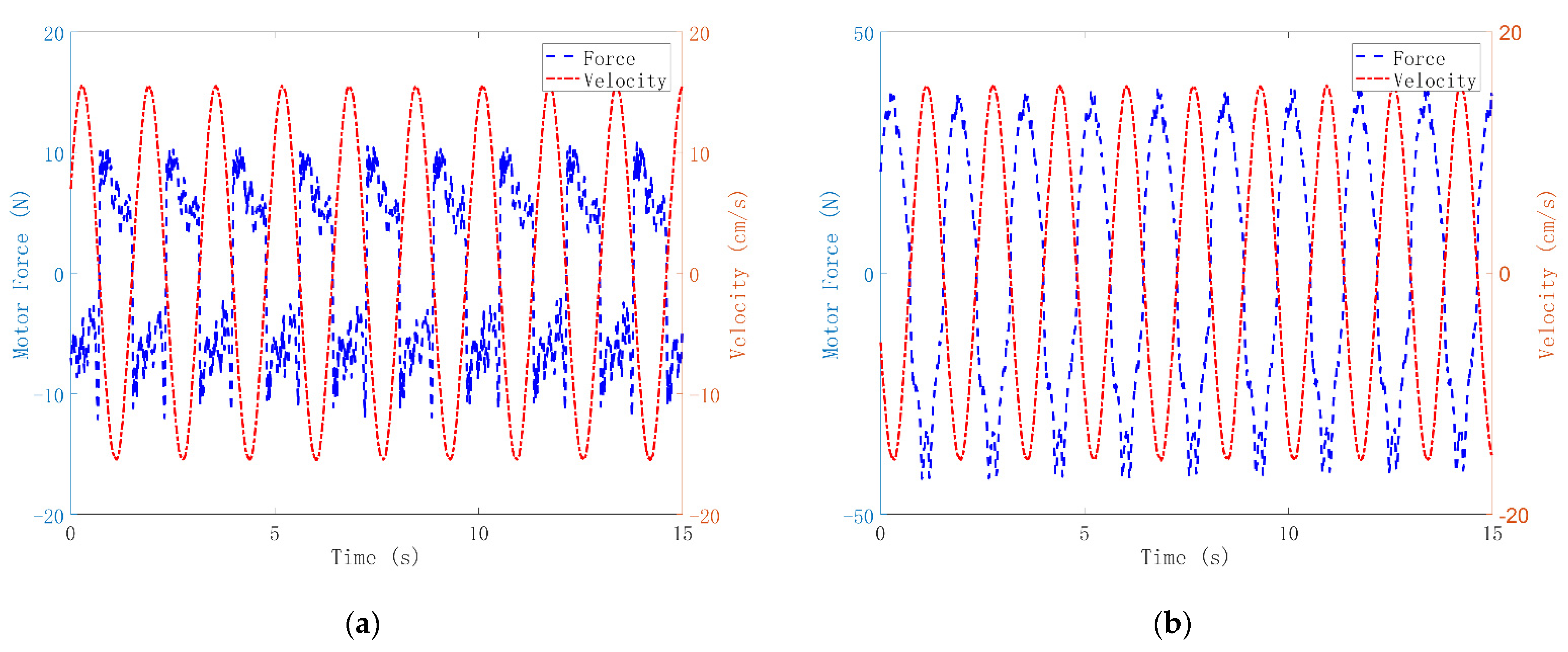
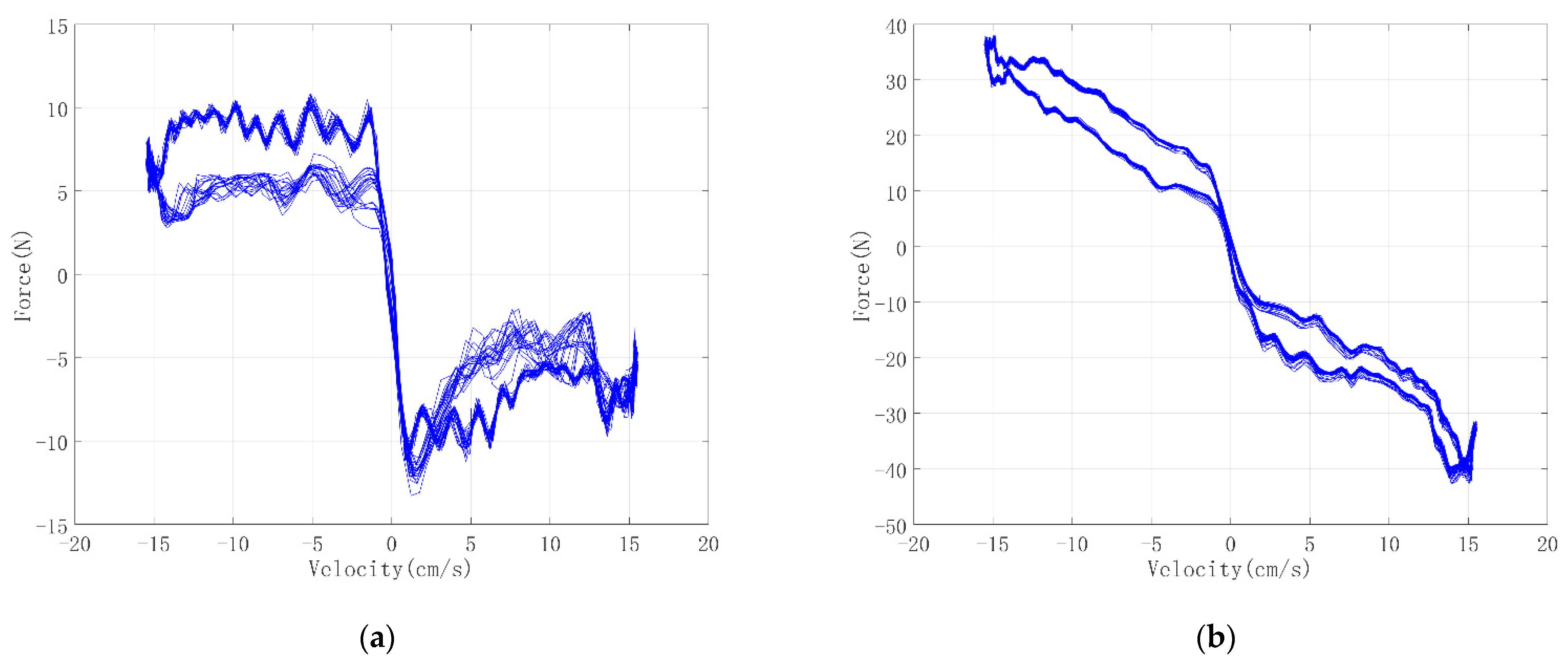
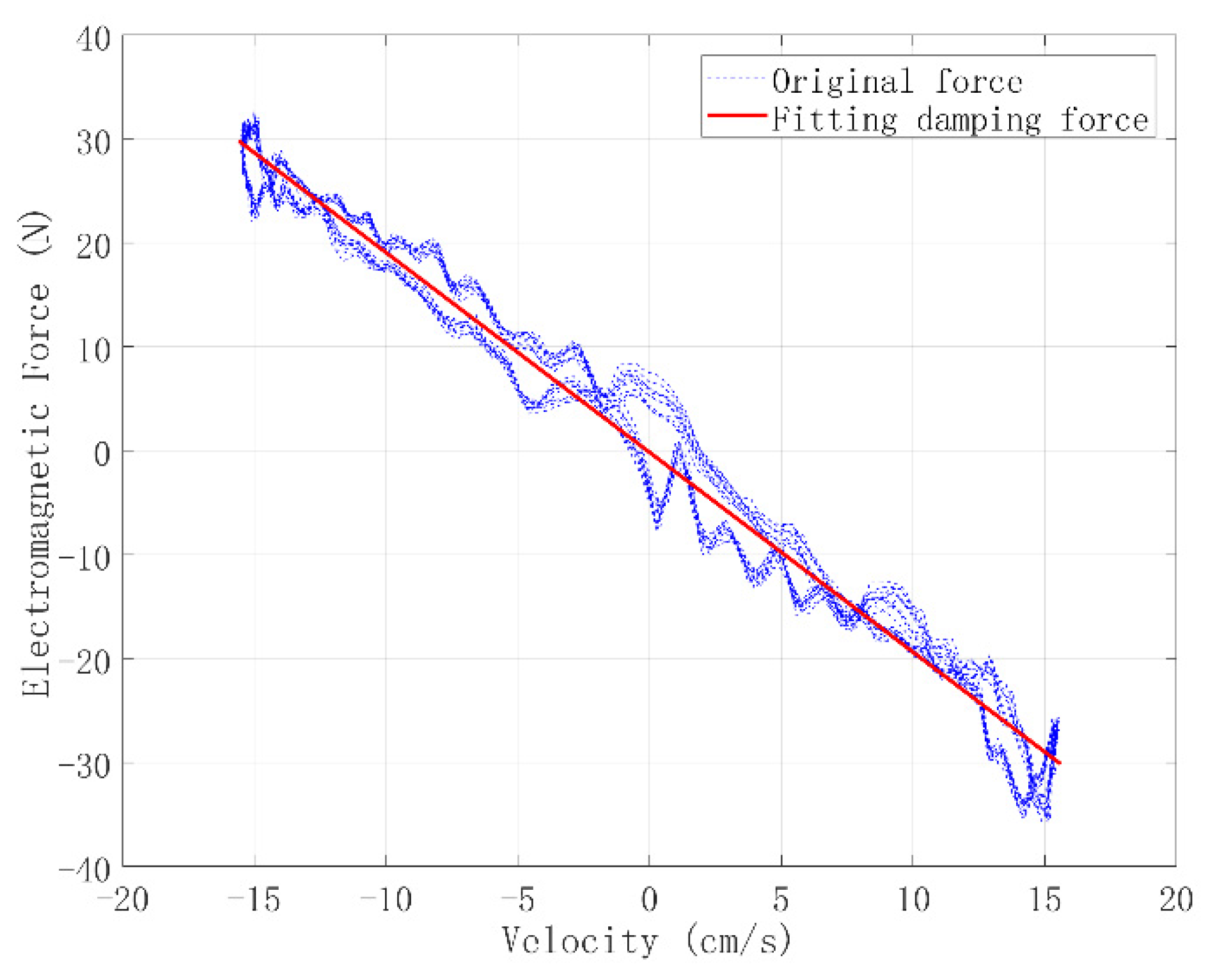
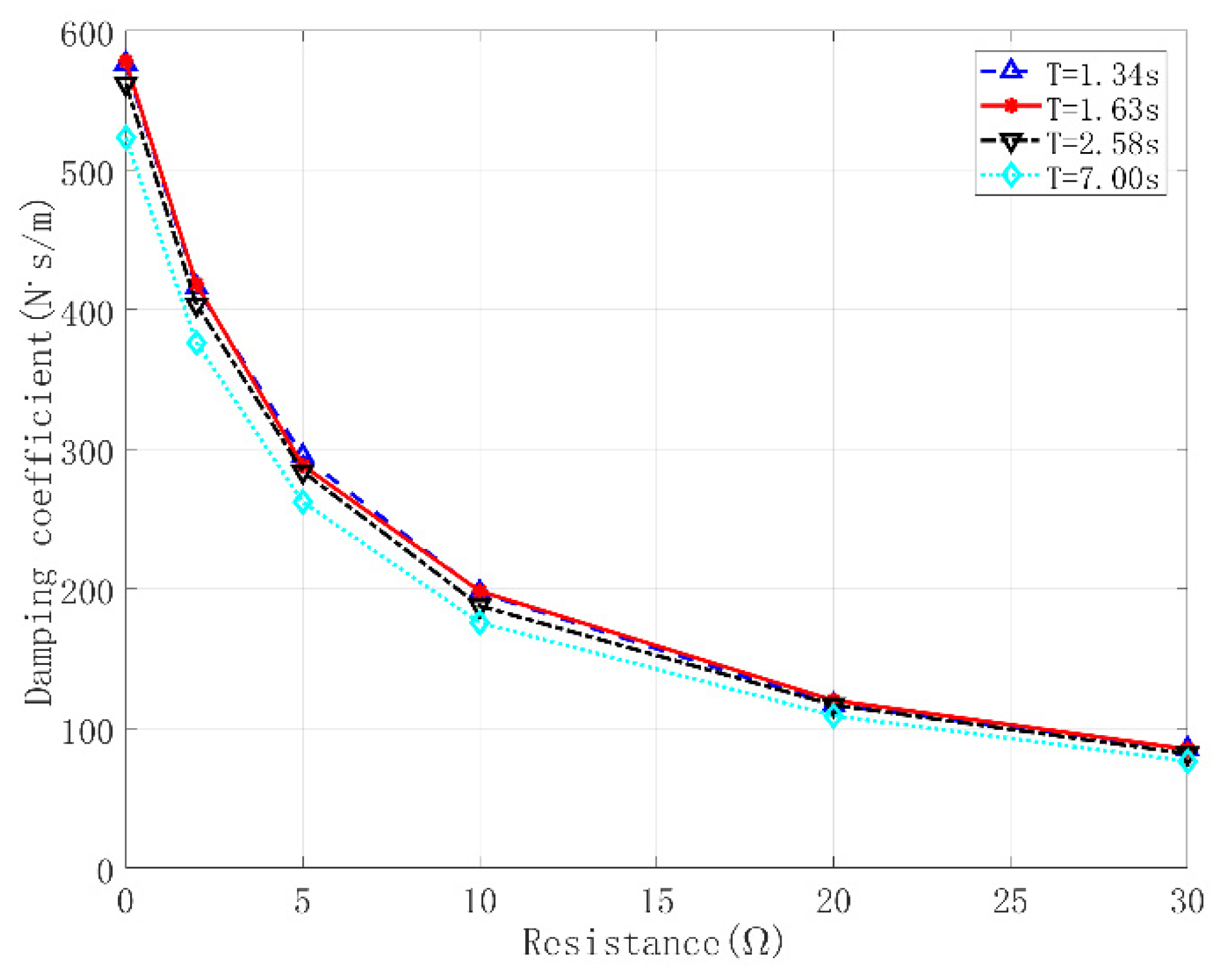
3.2. Setup of the Force Calibration Test of the PTO System
4. Results and Discussion
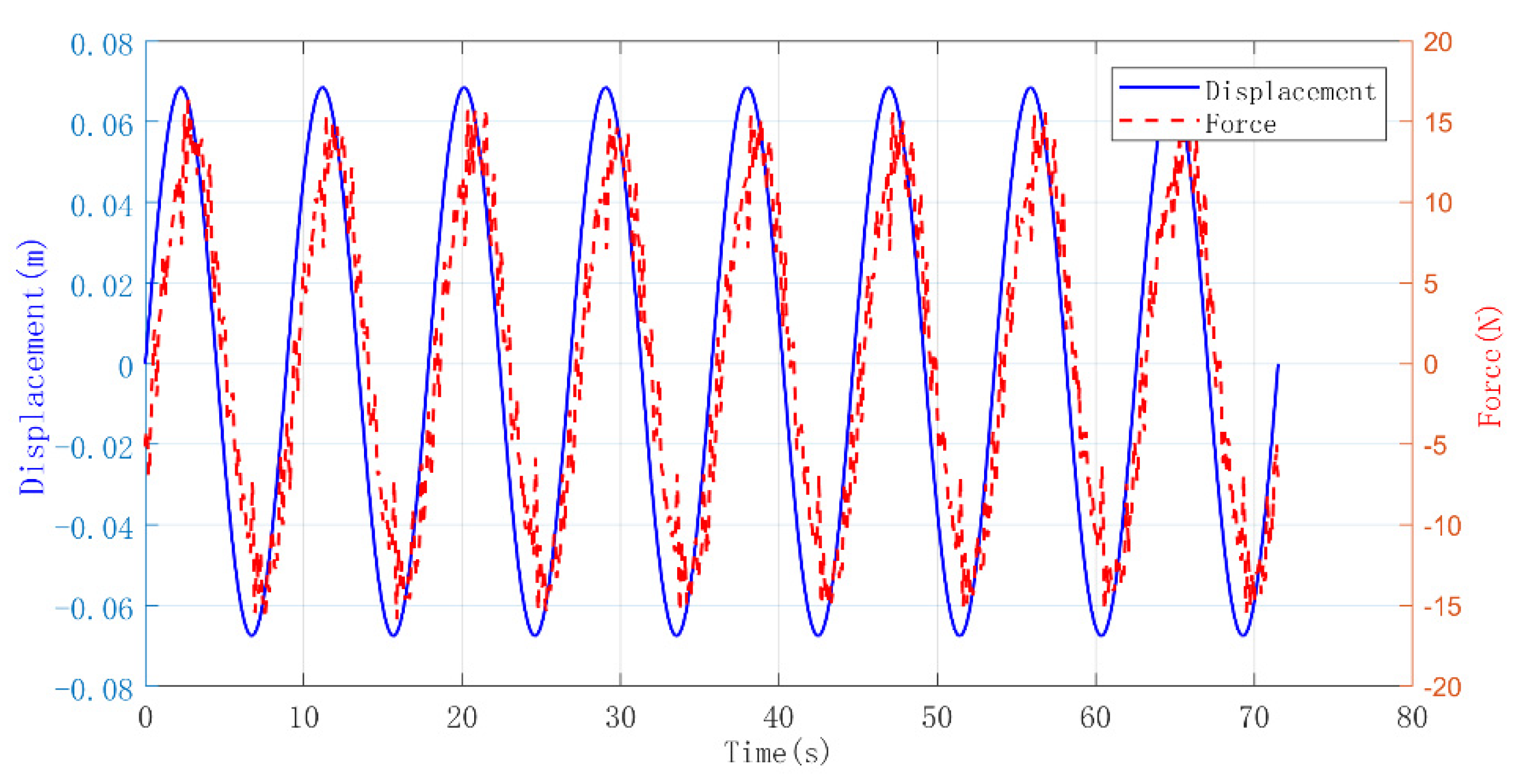
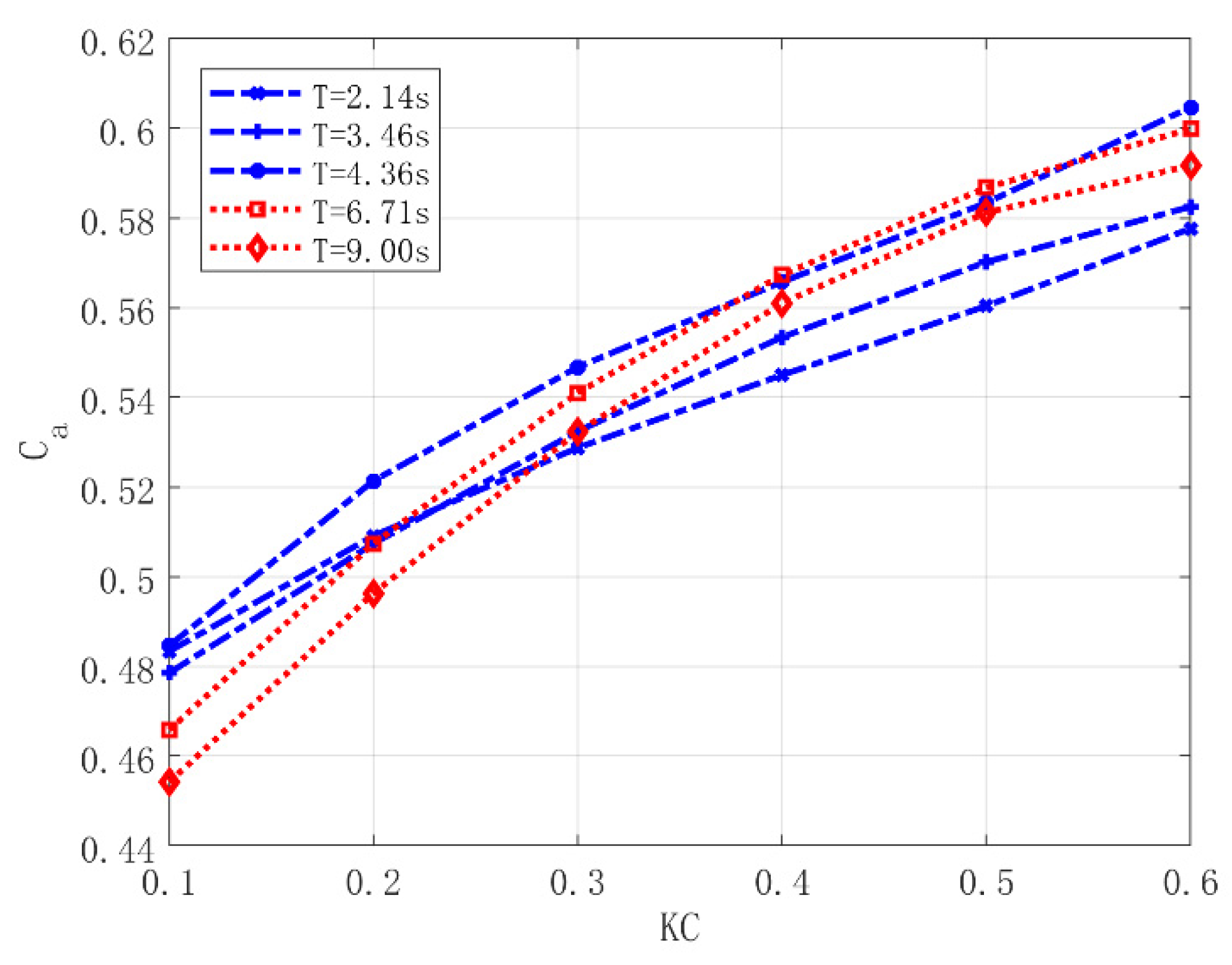
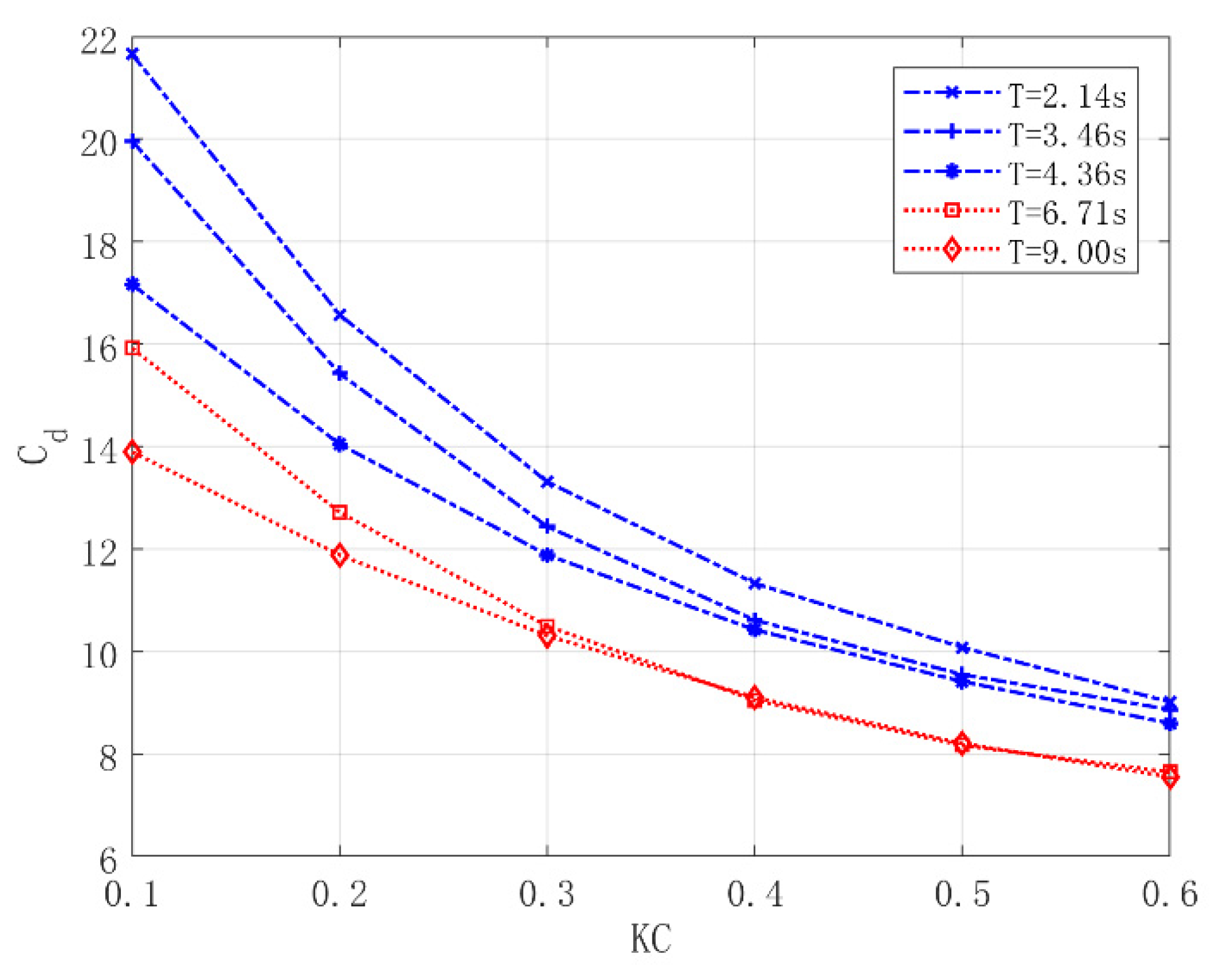
4.1. Hydrodynamic Analysis of the Heave Plate
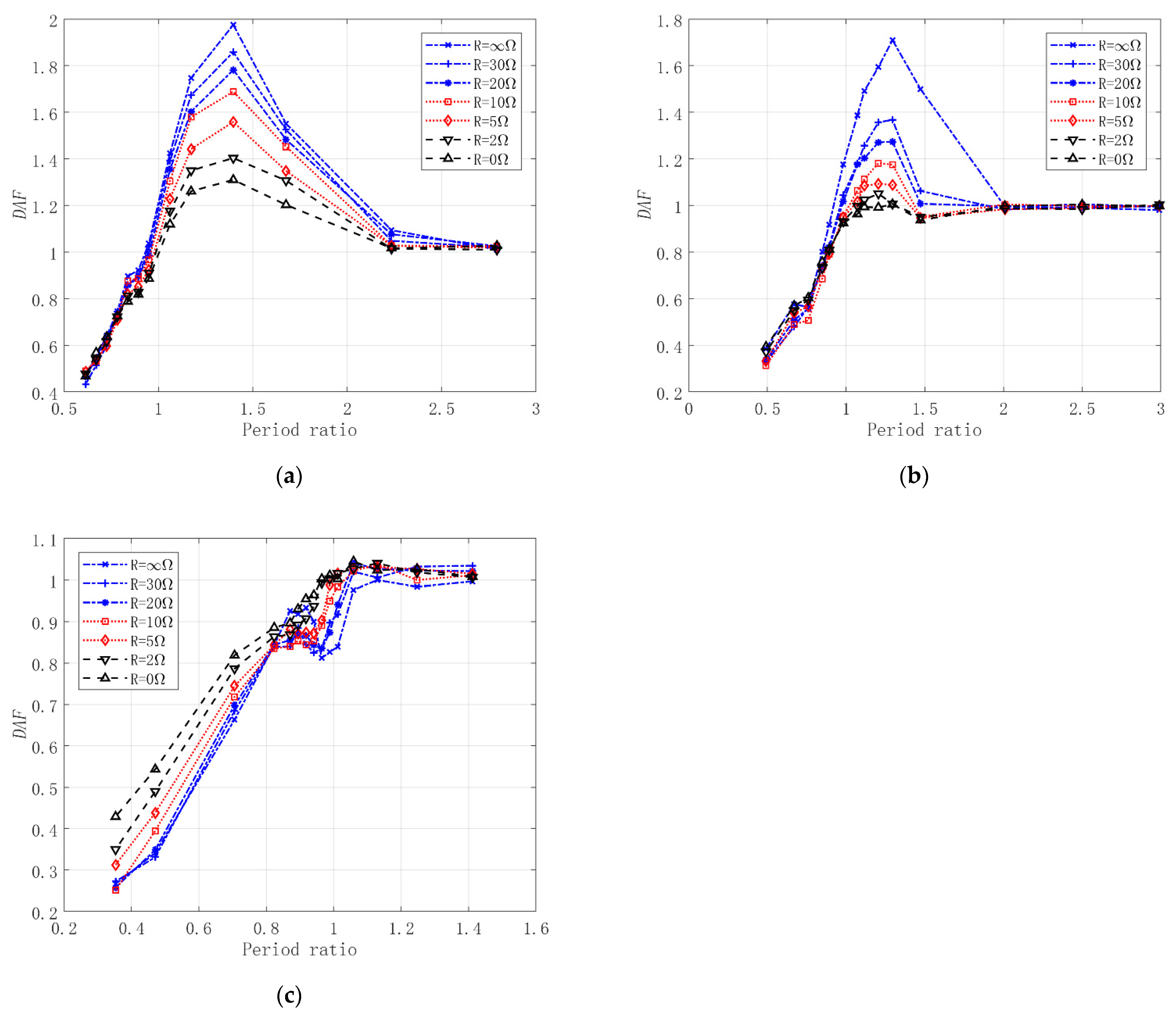
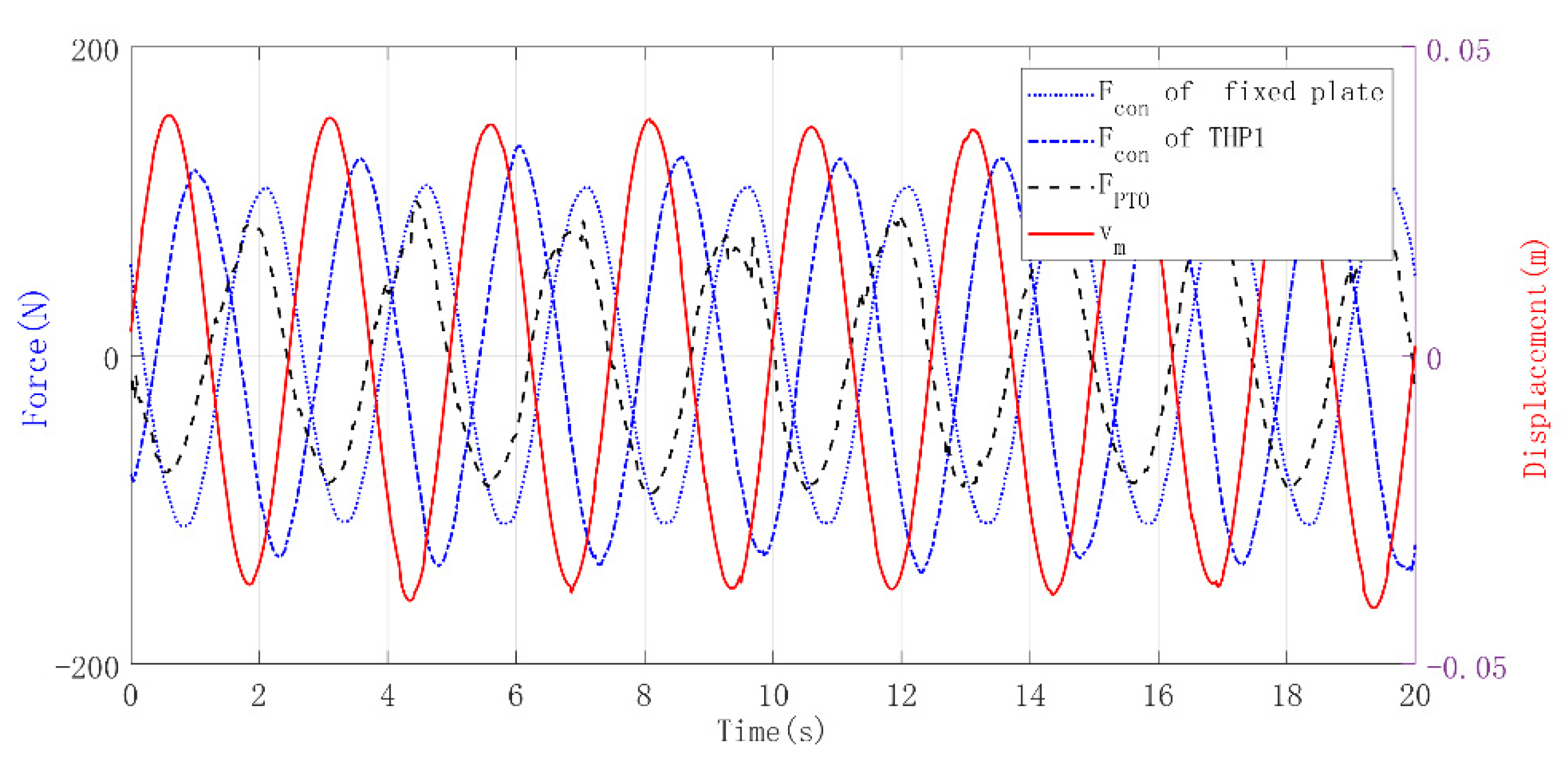
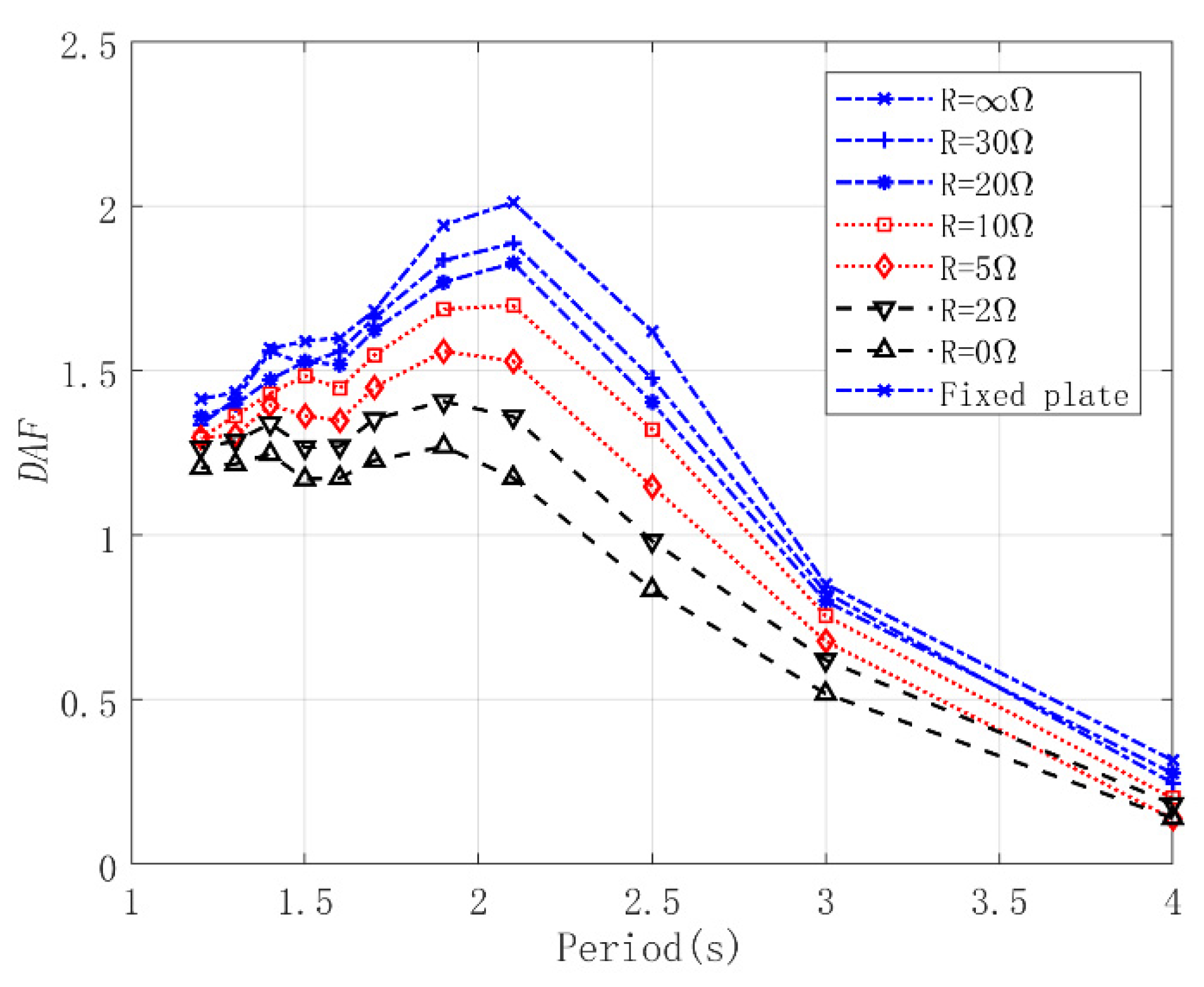
4.2. Control Performance of the THPEH
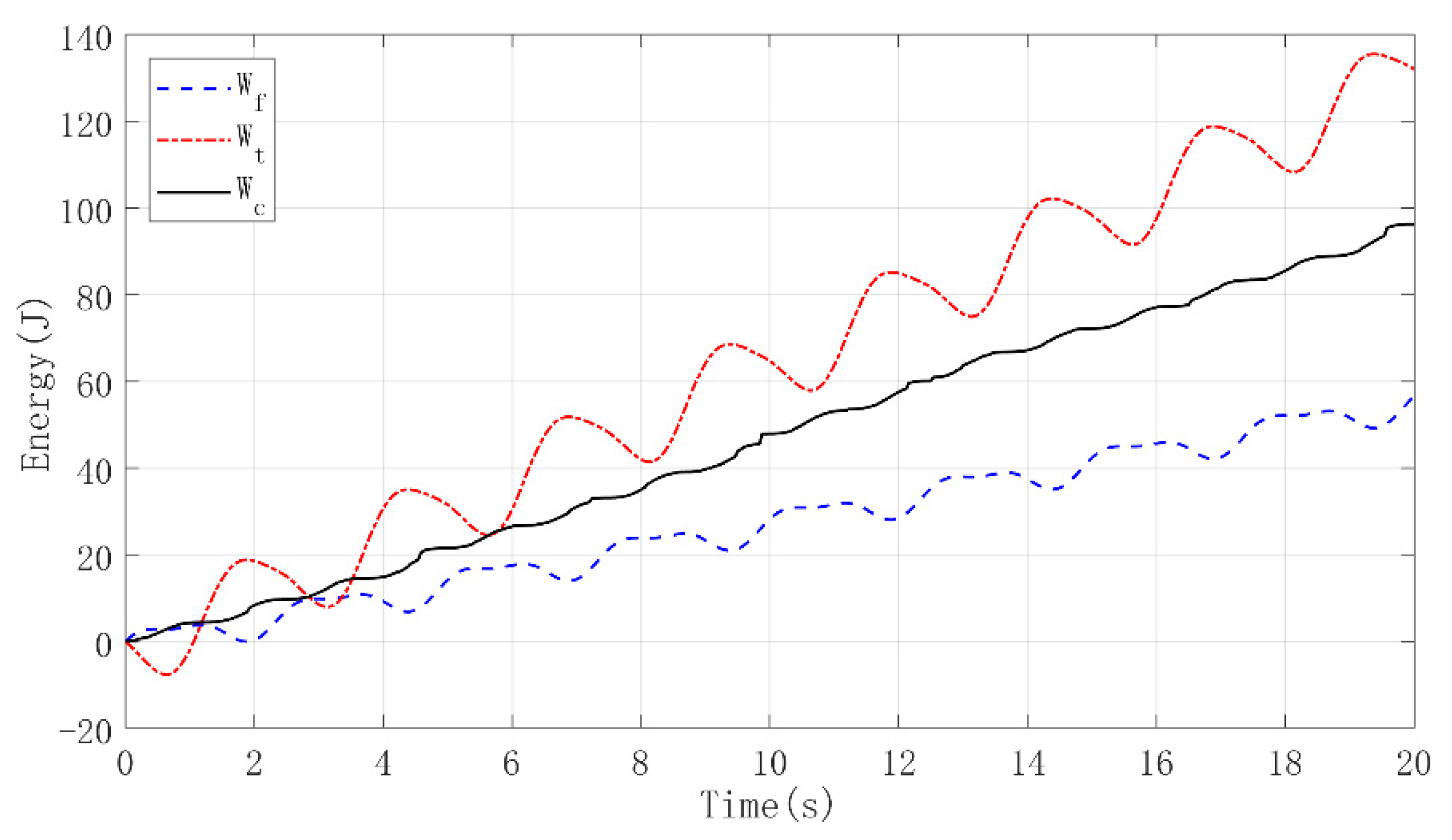
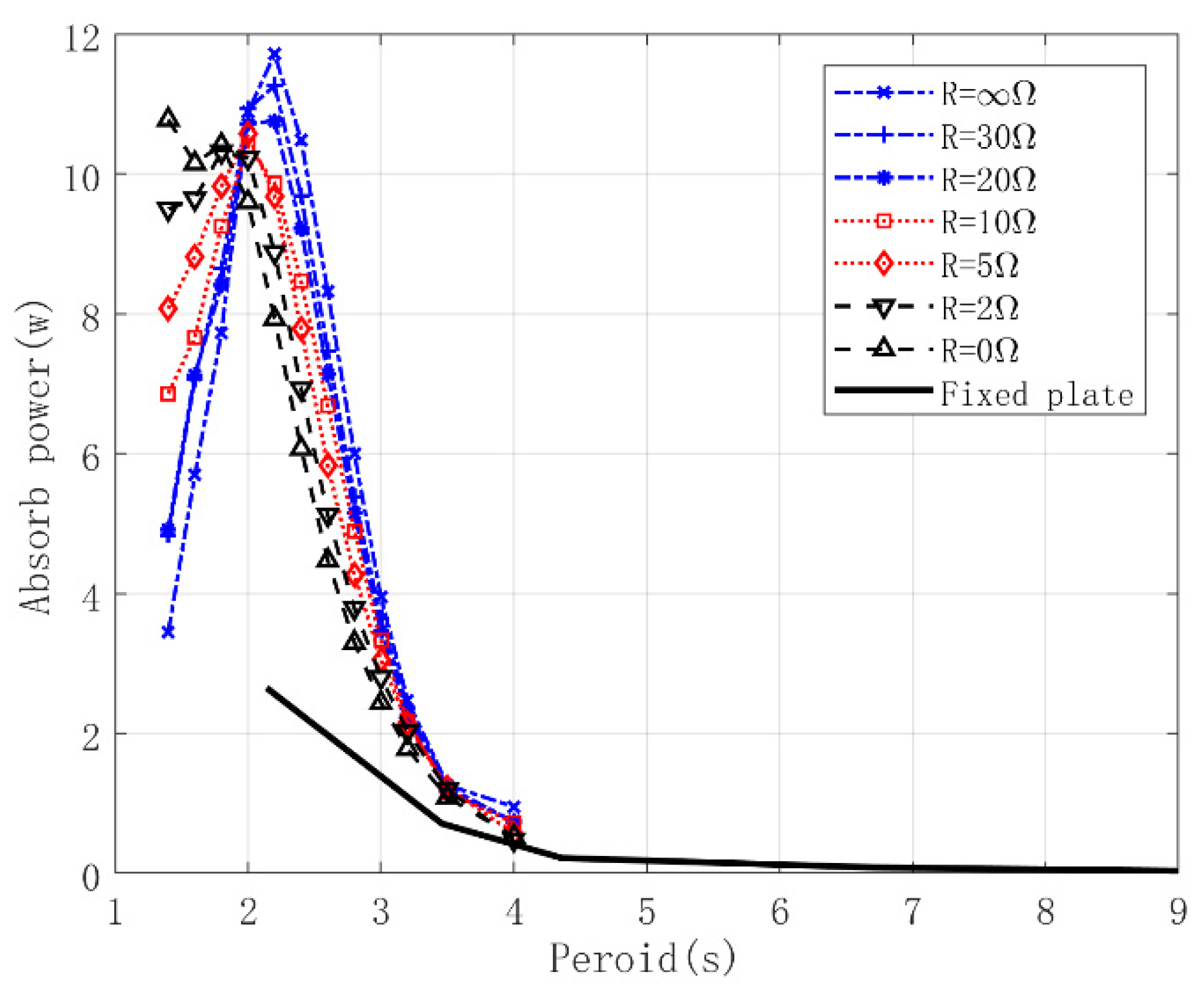
4.3. Energy Analysis of the THPEH
5. Conclusions
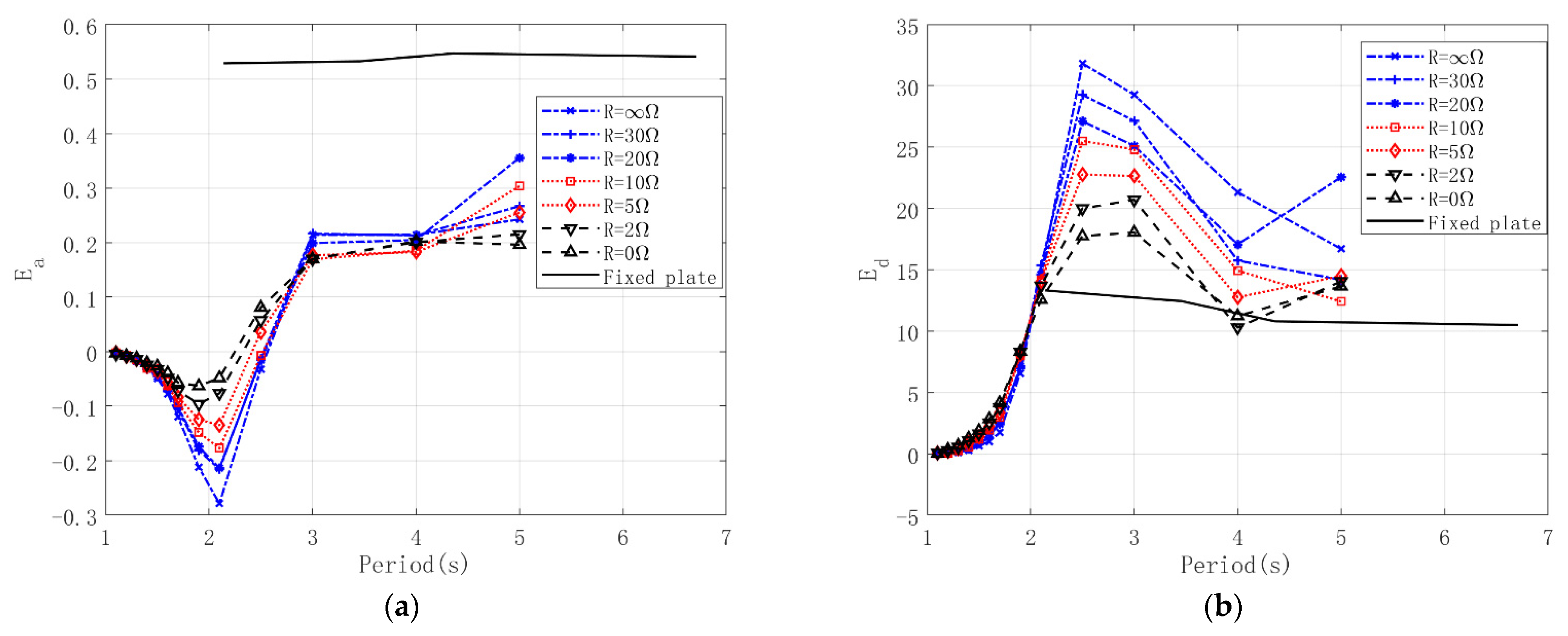
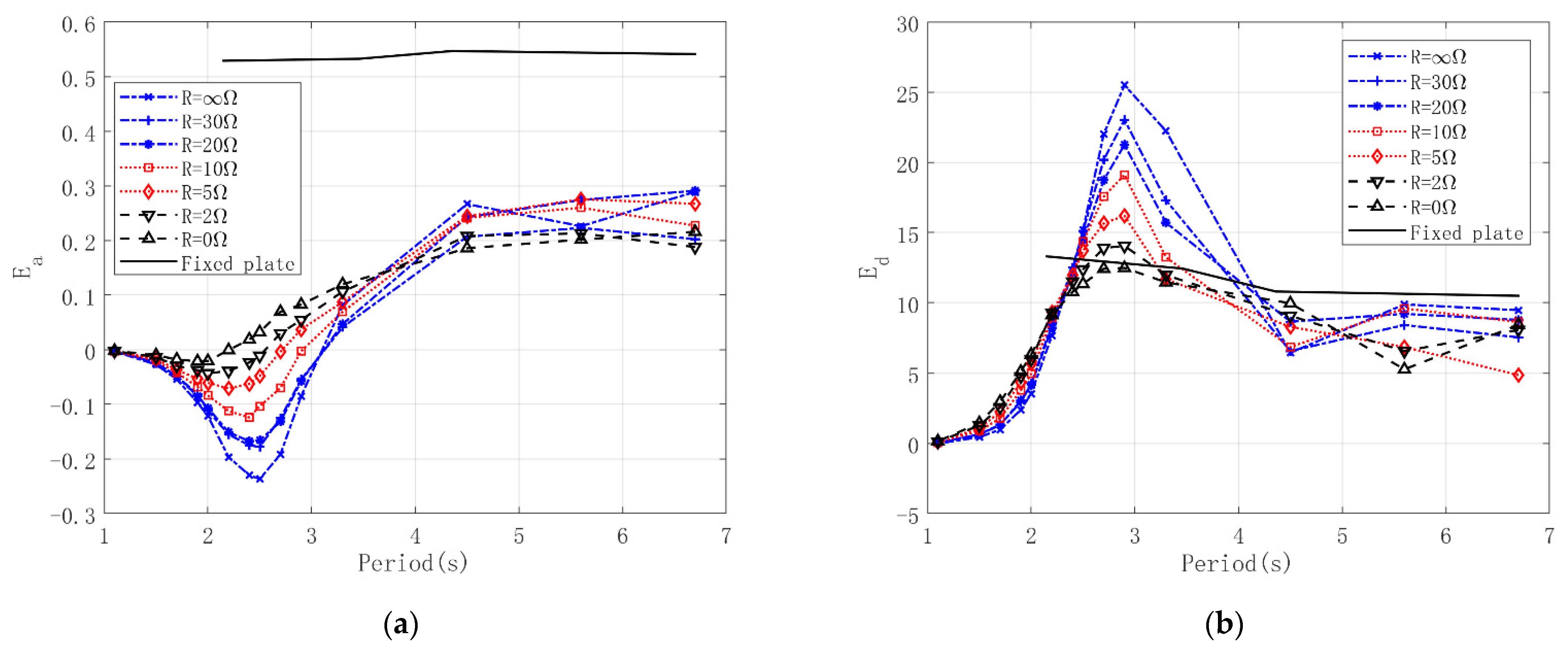
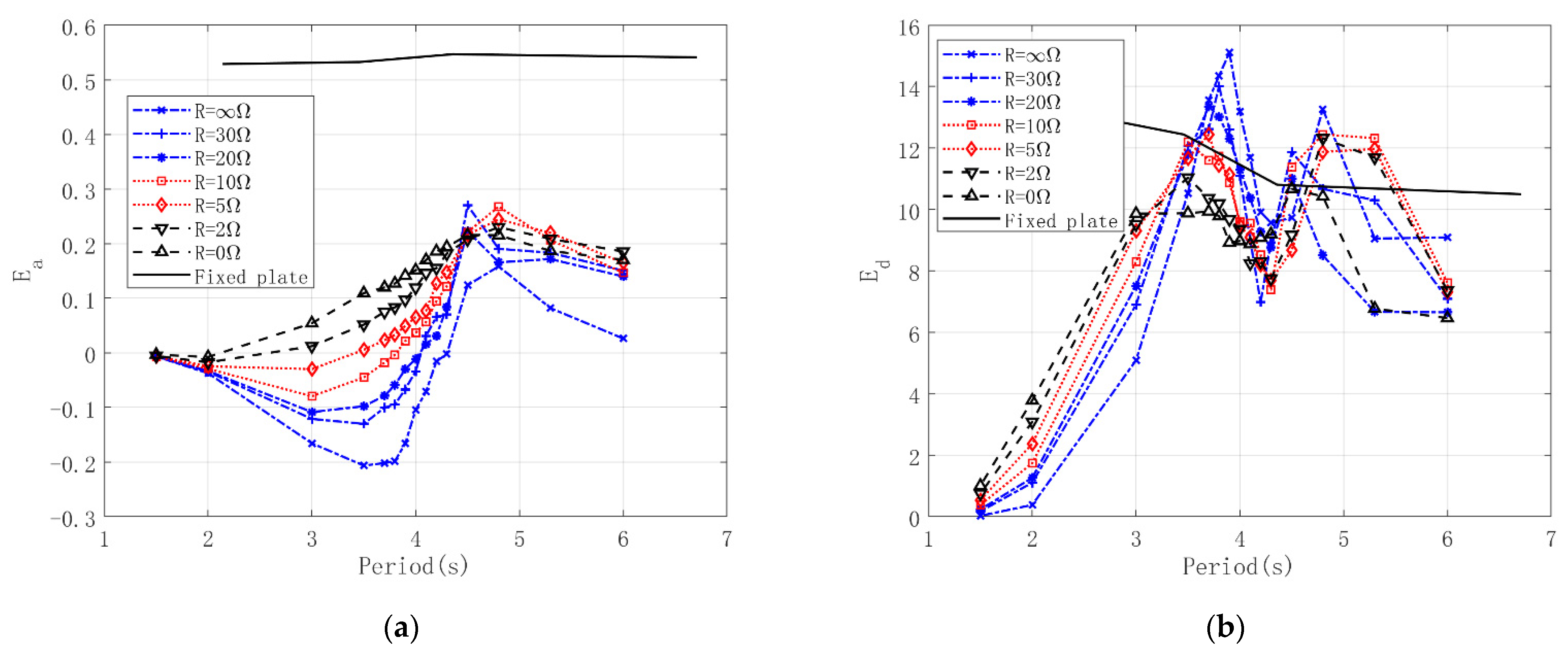
- Compared to the fixed heave plate system, a well-tuned THPEH could consume more energy from the exciting motion, while providing larger damping force to the exciting motion. THP1 consumes up to 2.5 times the energy from the platform motion near the tuned period of the THPEH compared to the fixed heave plate.
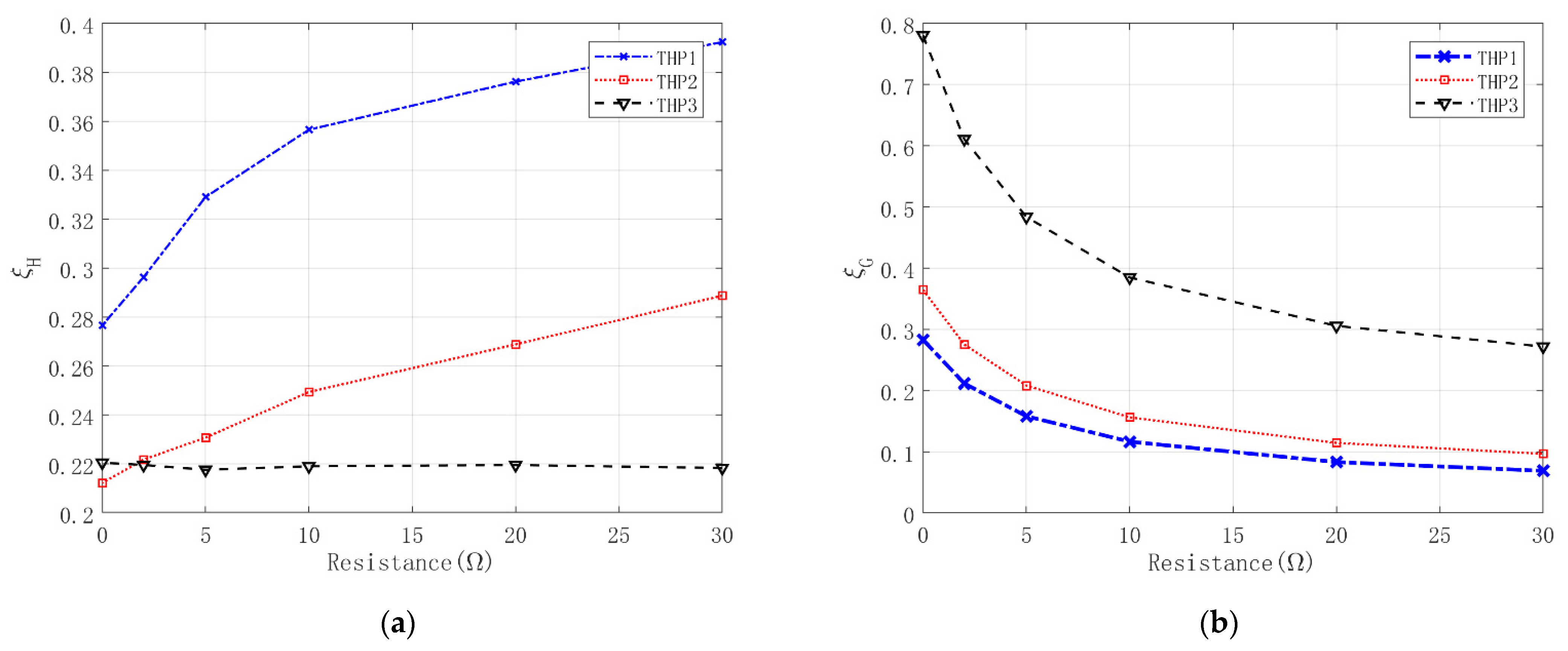
- Different from conventional TMDs, the THPEH should be tuned to the wave frequency to ensure that the motion of the THPEH can be excited, due to the large damping ratio contributed by the damping force of the heave plate and PTO system.
- The control performance of the THPEH decreases with increment of the PTO damping level, while the energy harvesting performance increases with the PTO damping level. For THP1, the PTO system could capture up to 80% of the energy absorbed by the system under optimal parameters.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Ratio between captured power and consumed power | |
| Damping ratio contributed by hydrodynamic force | |
| Damping ratio contributed by PTO force | |
| Density of water | |
| Frequency of platform motion | |
| Frequency of plate motion | |
| Equivalent volume of water displaced by the plate | |
| A | Project area of the plate |
| Amplitude of plate motion | |
| Motion amplitude of the plate in heave | |
| Motion amplitude of the platform in heave | |
| Added mass coefficient of the plate | |
| Drag coefficient of the plate | |
| Linear damping coefficient of the motor | |
| Equivalent damping coefficient of frictional force | |
| Total damping coefficient of the power take-off system | |
| Constant value for the motor | |
| Average identified value of | |
| Dynamic amplification factor of plate motion | |
| Equivalent added mass coefficient of the THPEH | |
| Equivalent damping coefficient of the THPEH | |
| Friction force of PTO | |
| Average identified value of | |
| Force of the motor | |
| Force of the power take-off system | |
| Control force of the ith THPEH | |
| Total control force of the four THPEHs on the 6-DOF motion of the platform | |
| KC | Keulegan–Carpenter number |
| Stiffness coefficient of the power take-off system | |
| L | Plate width |
| LR | Load resistance |
| Load resistance of the motor | |
| Internal resistance of the motor | |
| Period of motion | |
| THP | Tuned heave plate |
| THPEH | Tuned heave plate energy harvesting system |
| PTO | Power take-off system |
| Captured power of the THPEH | |
| Consumed power of the THPEH | |
| Consumed power of the fixed heave plate | |
| Velocity of the motor | |
| Captured work of the THPEH | |
| Consumed work of the THPEH | |
| Consumed work of the fixed heave plate | |
| Displacement of the THPEH in heave motion | |
| Velocity of the THPEH in heave motion | |
| Acceleration of the THPEH in heave motion | |
| Displacement of the platform in heave motion | |
| Velocity of the platform in heave motion | |
| Relative heave displacement between the THPEH and platform | |
| Relative heave velocity of between the THPEH and platform | |
| Relative heave displacement between the ith THPEH and platform | |
| Relative heave velocity of between the ith THPEH and platform |
References
- Haslum, H.A.; Faltinsen, O.M. Alternative shape of sparplatforms for use in hostile areas. In Proceedings of the Offshore Technology Conference, OTC10953, Houston, TX, USA, 7 May 1990. [Google Scholar]
- Bindingsbo, A.U.; BjoRset, A. Deep Draft Semi Submersible. In Proceedings of the ASME 2002 21st International Conference on Offshore Mechanics and Arctic Engineering, Oslo, Norway, 23–28 June 2002. [Google Scholar]
- Mills, T.; Chen, C.Y. Deep Draft Semi-Submersible Offshore Floating Structure. U.S. Patent 11/385, 27 September 2007. [Google Scholar]
- Xie, B.; Xie, W.; Jiang, Z. A new concept of a deepwater tumbler platform. In Proceedings of the International Offshore and Polar Engineering Conference, Rhodes, Greece, 17–23 June 2012. [Google Scholar]
- Halkyard, J.; Chao, J.; Abbott, P.; Dagleish, J.; Banon, H.; Thiagarajan, K. A Deep Draft Semisubmersible with a Retractable Heave Plate. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 6–9 May 2002. [Google Scholar]
- Cermelli, C.A.; Roddier, D.G.; Busso, C.C. MINIFLOAT: A novel concept of minimal floating platform for marginal field development. In Proceedings of the Fourteenth International Offshore and Polar Engineering Conference, Toulon, France, 23–28 May 2004. [Google Scholar]
- Murray, J.J.; Yang, C.K.; Chen, C.Y.; Nah, E. Two dry tree semisubmersible designs for ultra deep water post-Katrina Gulf of Mexico. In Proceedings of the ASME 2008 27th International Conference on Offshore Mechanics and Arctic Engineering, Estoril, Portugal, 15–20 June 2008. [Google Scholar]
- Chakrabarti, S.; Barnett, J.; Kanchi, H.; Mehta, A.; Yim, J. Design analysis of a truss pontoon semi-submersible concept in deep water. Ocean Eng. 2007, 34, 621–629. [Google Scholar] [CrossRef]
- Prislin, I.; Blevins, R.; Halkyard, J. Viscous damping and added mass of solid square plates. In Proceedings of the 17th Offshore Mechanics and Arctic Engineering Conference, Lisbon, Portugal, 5–6 July 1998. [Google Scholar]
- Molin, B. On the added mass and damping of periodic arrays of fully or partially porous disks. J. Fluids Struct. 2001, 15, 275–290. [Google Scholar] [CrossRef]
- Chua, K.H.; Clelland, D.; Huang, S.; Sworn, A. Model Experiments of Hydrodynamic Forces on Heave Plates. In Proceedings of the ASME 2005 International Conference on Offshore Mechanics and Arctic Engineering, Halkidiki, Greece, 12–17 June 2005. [Google Scholar]
- Li, J.; Liu, S.; Zhao, M.; Teng, B. Experimental investigation of the hydrodynamic characteristics of heave plates using forced oscillation. Ocean Eng. 2013, 66, 82–91. [Google Scholar] [CrossRef]
- Tao, L.; Cai, S. Heave motion suppression of a Spar with a heave plate. Ocean Eng. 2004, 31, 669–692. [Google Scholar] [CrossRef] [Green Version]
- Thiagarajan, K.; Moreno, J. Wave Induced Effects on the Hydrodynamic Coefficients of an Oscillating Heave Plate in Offshore Wind Turbines. J. Mar. Sci. Eng. 2020, 8, 622. [Google Scholar] [CrossRef]
- Lemmer, F.; Yu, W.; Cheng, P.W. Iterative Frequency-Domain Response of Floating Offshore Wind Turbines with Parametric Drag. J. Mar. Sci. Eng. 2018, 6, 118. [Google Scholar] [CrossRef] [Green Version]
- Frahm, H. Device for Damping Vibrations of Bodies. U.S. Patent US989958A, 18 April 1911. [Google Scholar]
- Soong, T.T.; Dargush, G.F. Passive Energy Dissipation Systems in Structural Engineering; Wiley: Hoboken, NJ, USA, 1997. [Google Scholar]
- Spencer, B., Jr.; Nagarajaiah, S. State of the art of structural control. J. Struct. Eng. 2003, 129, 845–856. [Google Scholar] [CrossRef]
- Housner, G.; Bergman, L.A.; Caughey, T.K.; Chassiakos, A.G.; Claus, R.O.; Masri, S.F.; Skelton, R.E.; Soong, T.T.; Spencer, B.F.; Yao, J.T.P. Structural control: Past, present, and future. J. Eng. Mech. 1997, 123, 897–971. [Google Scholar] [CrossRef]
- Xu, H.; Zhang, C.; Li, H.; Ou, J. Real-time hybrid simulation approach for performance validation of structural active control systems: A linear motor actuator based active mass driver case study. Struct. Control. Health Monit. 2013, 21, 574–589. [Google Scholar] [CrossRef]
- Kourakis, I. Structural Systems and Tuned Mass Dampers of Super-Tall Buildings: Case Study of Taipei 101; Massachusetts Institute of Technology: Cambridge, MA, USA, 2007. [Google Scholar]
- Xu, H.B.; Zhang, C.W.; Li, H.; Tan, P.; Ou, J.P.; Zhou, F.L. Active mass driver control system for suppressing wind-induced vibration of the Canton Tower. Smart Struct. Syst. 2014, 13, 281–303. [Google Scholar] [CrossRef]
- Zhu, S.; Shen, W.-A.; Xu, Y.-L. Linear electromagnetic devices for vibration damping and energy harvesting: Modeling Test. Eng. Struct. 2012, 34, 198–212. [Google Scholar] [CrossRef] [Green Version]
- Ali, S.F.; Adhikari, S. Energy harvesting dynamic vibration absorbers. J. Appl. Mech. 2013, 80, 041004. [Google Scholar] [CrossRef]
- Tang, X.; Zuo, L. Simulation and experiment validation of simultaneous vibration control and energy harvesting from buildings using tuned mass dampers. In Proceedings of the American Control Conference (ACC 2011), San Francisco, CA, USA, 1–19 July 2011. [Google Scholar]
- Liu, K.; Liang, H.; Ou, J. Numerical Investigation of a Tuned Heave Plate Energy-Harvesting System of a Semi-Submersible Platform. Energies 2016, 9, 82. [Google Scholar] [CrossRef]
- Tao, L.; Dray, D. Hydrodynamic performance of solid and porous heave plates. Ocean Eng. 2008, 35, 1006–1014. [Google Scholar] [CrossRef]
- Tao, L.; Molin, B.; Scolan, Y.-M.; Thiagarajan, K. Spacing effects on hydrodynamics of heave plates on offshore structures. J. Fluids Struct. 2007, 23, 1119–1136. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Deck (m) | 77.47 × 74.3 × 8.6 |
| Column (m) | 17 ×17 × 21.5 |
| Pontoon (m) | 114 × 20.1 × 8.5 |
| Draft of the pontoon (m) | 19 |
| Displacement (t) | 51,700 |
| Heave period (s) | 19.8 |
| Pitch period (s) | 40.8 |
| Roll period (s) | 49.3 |
| Heave plate (m) | 17 × 17 × 0.4 |
| Draft of the plate (m) | 60 |
| Model Plate | Tuned Period (s) | Spring Stiffness (N/m) | Motion Period (s) | KC | |
|---|---|---|---|---|---|
| THP 1 | 1.79 | 4600 | 1.0~7.0 | 0.3 | |
| THP 2 | 2.24 | 3300 | |||
| THP 3 | 4.25 | 845 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, K.; Liang, H.; Ou, J.; Ye, J.; Wang, D. Experimental Investigation of the Performance of a Tuned Heave Plate Energy Harvesting System for a Semi-Submersible Platform. J. Mar. Sci. Eng. 2022, 10, 45. https://doi.org/10.3390/jmse10010045
Liu K, Liang H, Ou J, Ye J, Wang D. Experimental Investigation of the Performance of a Tuned Heave Plate Energy Harvesting System for a Semi-Submersible Platform. Journal of Marine Science and Engineering. 2022; 10(1):45. https://doi.org/10.3390/jmse10010045
Chicago/Turabian StyleLiu, Kun, Haizhi Liang, Jingpin Ou, Jiawei Ye, and Dongjiao Wang. 2022. "Experimental Investigation of the Performance of a Tuned Heave Plate Energy Harvesting System for a Semi-Submersible Platform" Journal of Marine Science and Engineering 10, no. 1: 45. https://doi.org/10.3390/jmse10010045