
Path Tracking of an Underwater Snake Robot and Locomotion Efficiency Optimization Based on Improved Pigeon-Inspired Algorithm



Abstract
:1. Introduction
2. Path Tracking Based on ILOS
2.1. Motion Control Method of Snake Robot
2.1.1. Dynamic Model
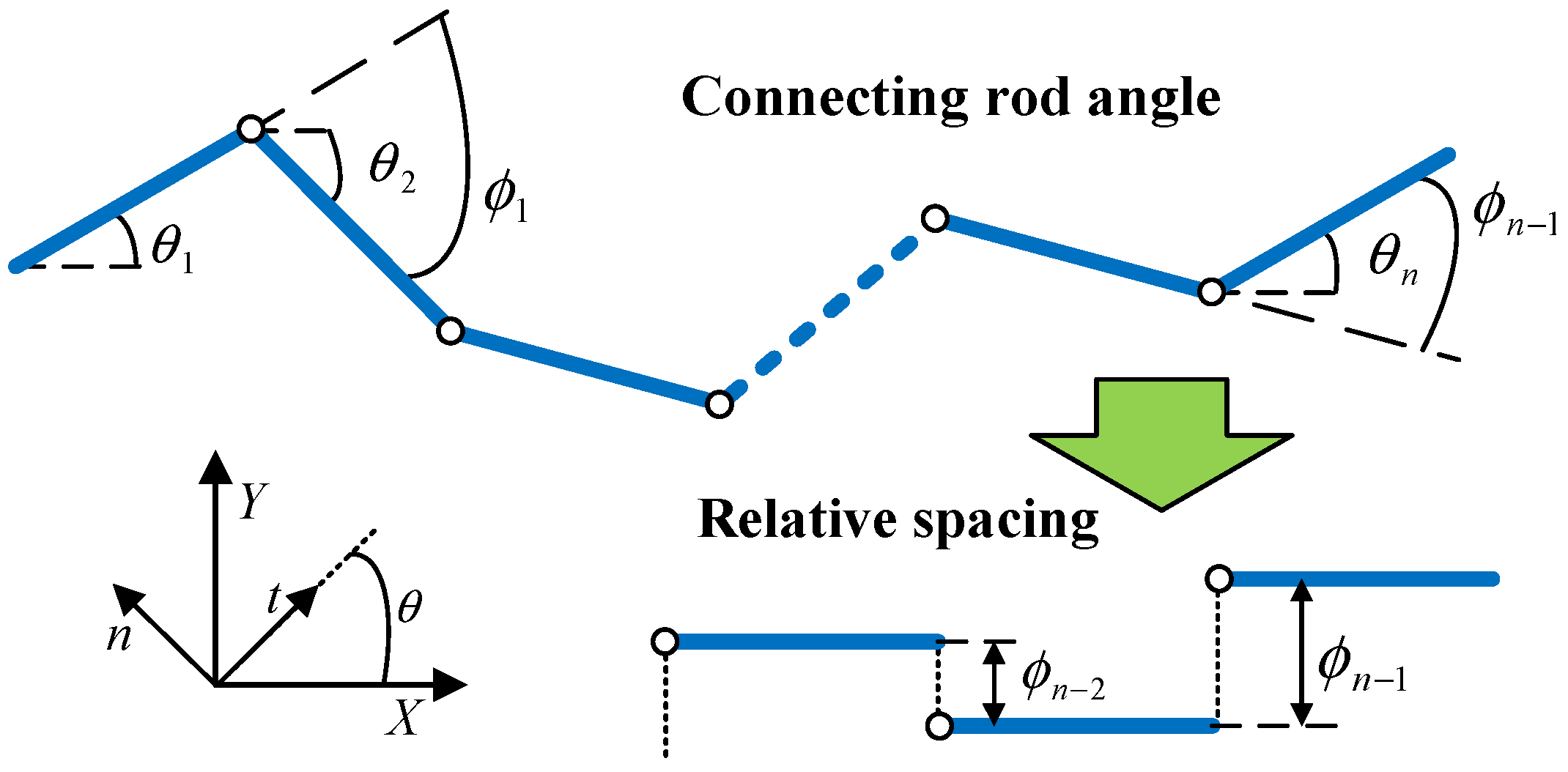
2.1.2. Locomotion Pattern
2.2. Path Planning and ILOS-Based Controller
2.2.1. Path Planning Based on PCSI
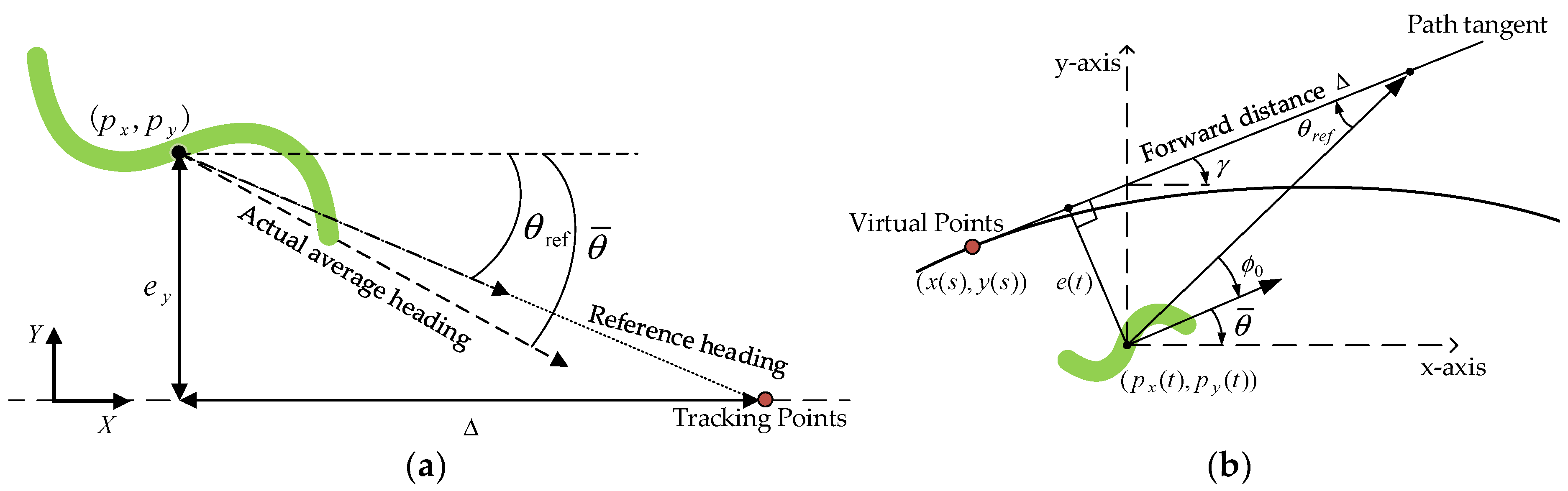
2.2.2. LOS Guidance Law
2.2.3. Improved LOS Method
- Step 1:
- Completing the path planning and calculating the parameters by means of Equation (5);
- Step 2:
- Matching of virtual points is completed by (10)–(14), and the heading error in (8) is calculated;
- Step 3:
- The angular bias in (2) is calculated by (9), (15), (16), and then the current iteration is completed according to the dynamics model in (1).
3. Locomotion Efficiency Optimization Based on QPIO
3.1. Optimization Problem Description
3.2. Parameter Optimization with QPIO
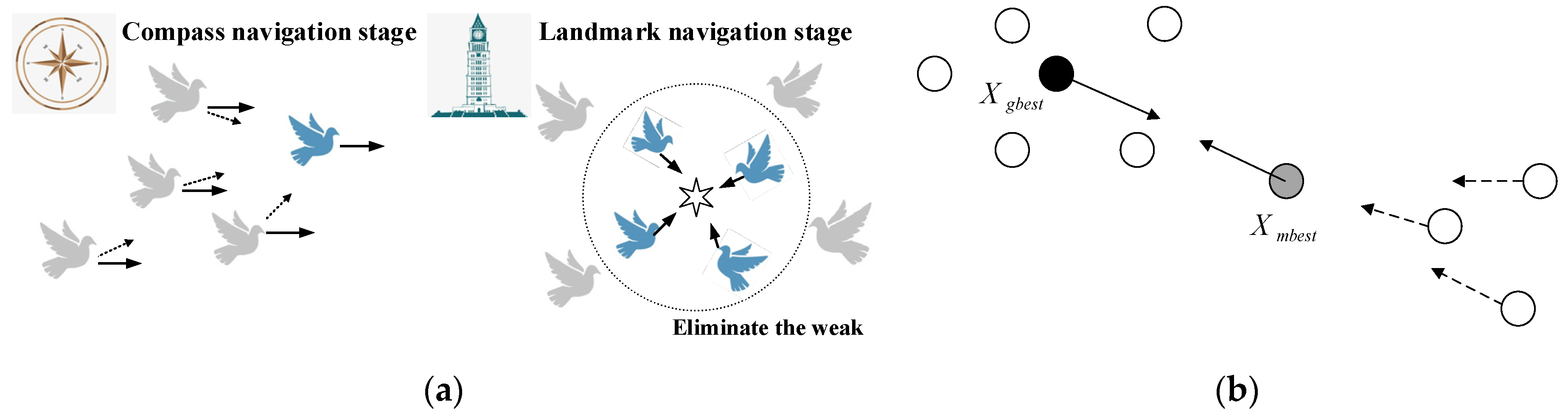
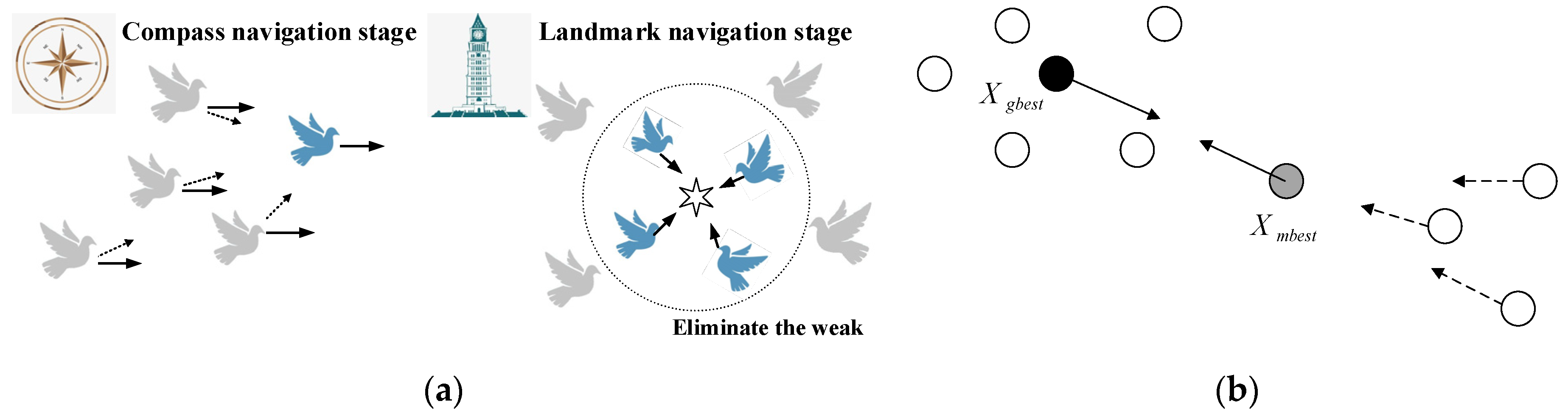
3.2.1. Principle of the Pigeon-Inspired Algorithm
3.2.2. Improve PIO by Quantum Rules
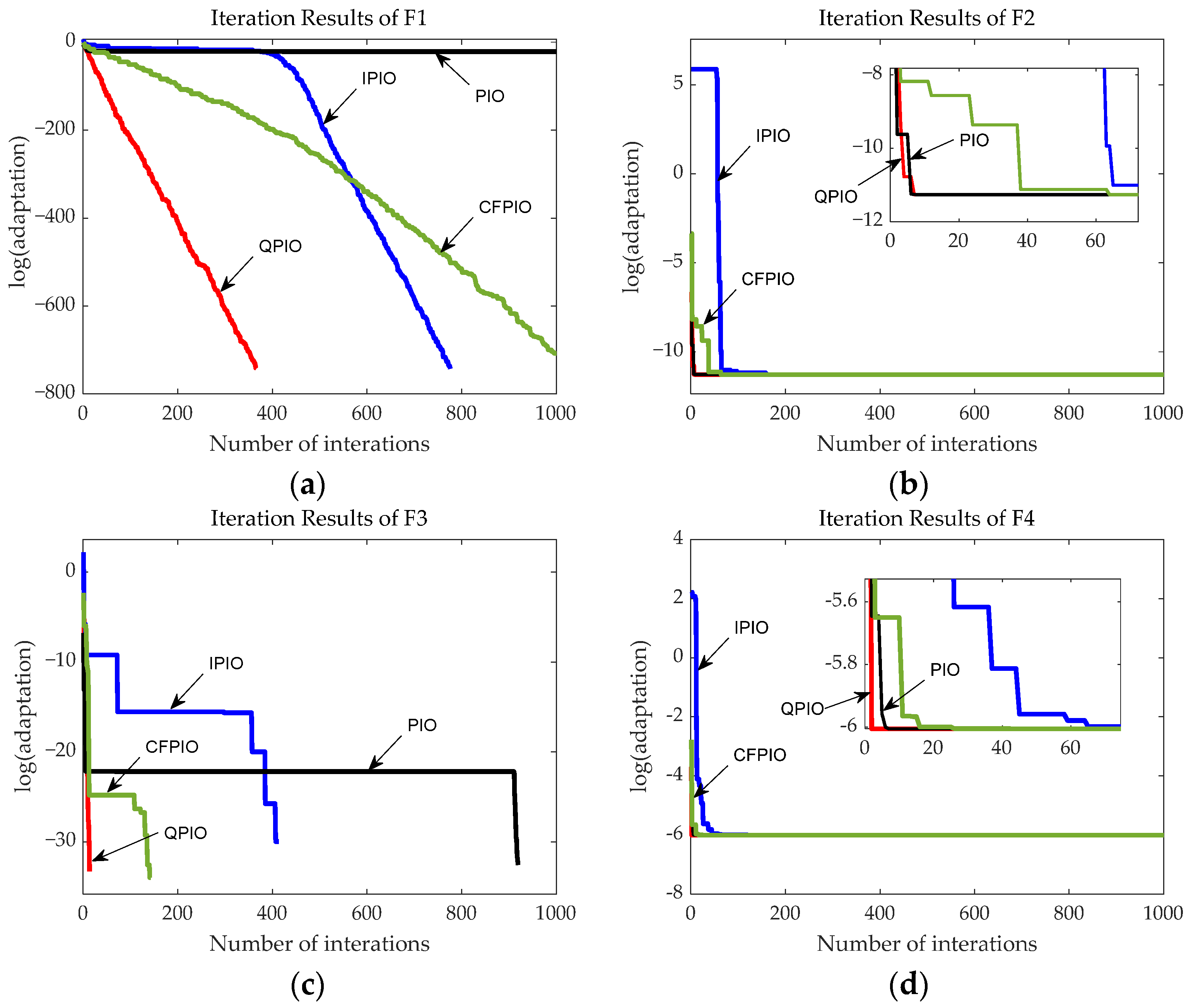
3.2.3. Algorithm Performance Test
4. Simulation
4.1. Parameters of Robot and Opitimizaion Algorithm
4.2. Path Tracking and Efficiency Optimization
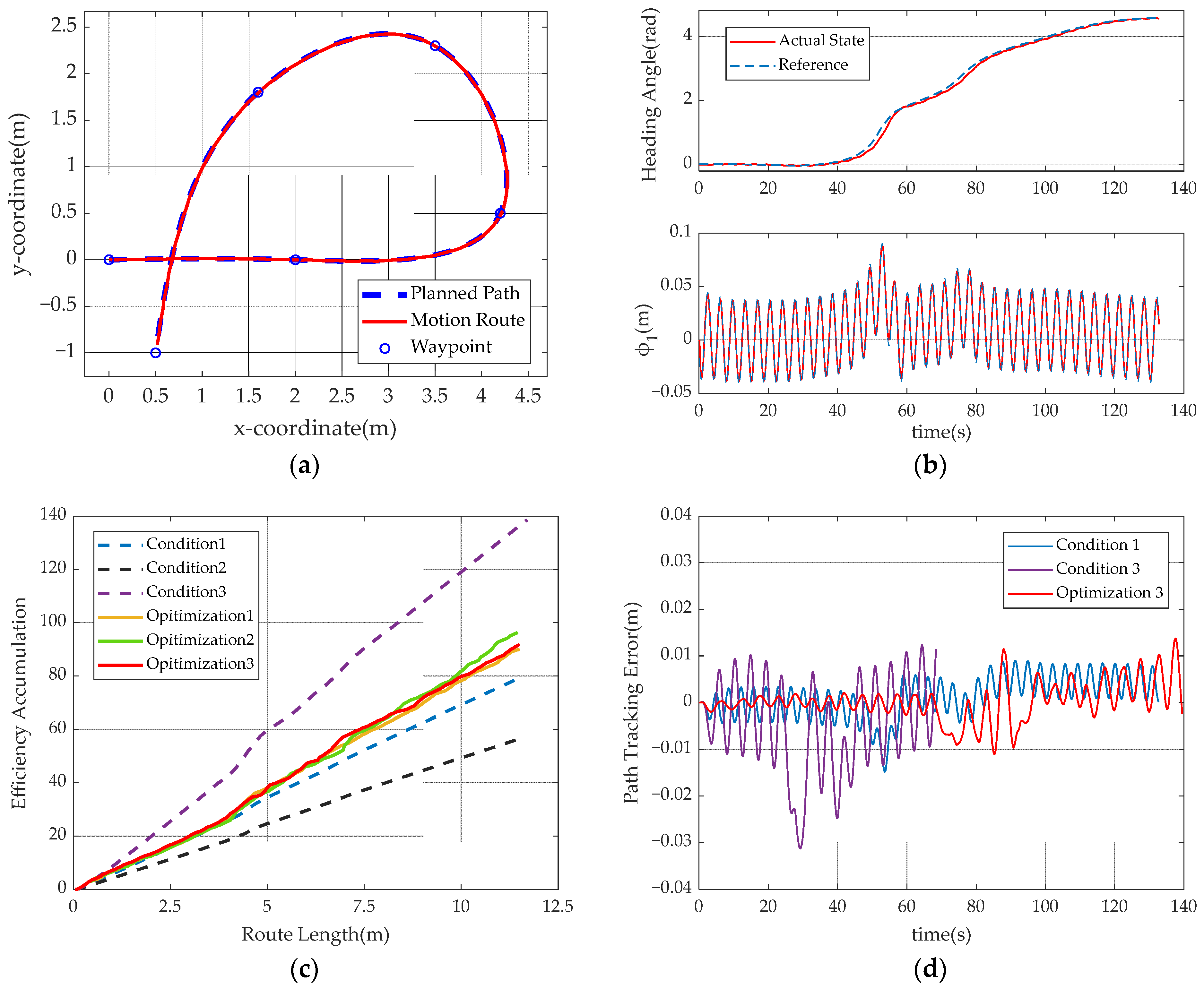
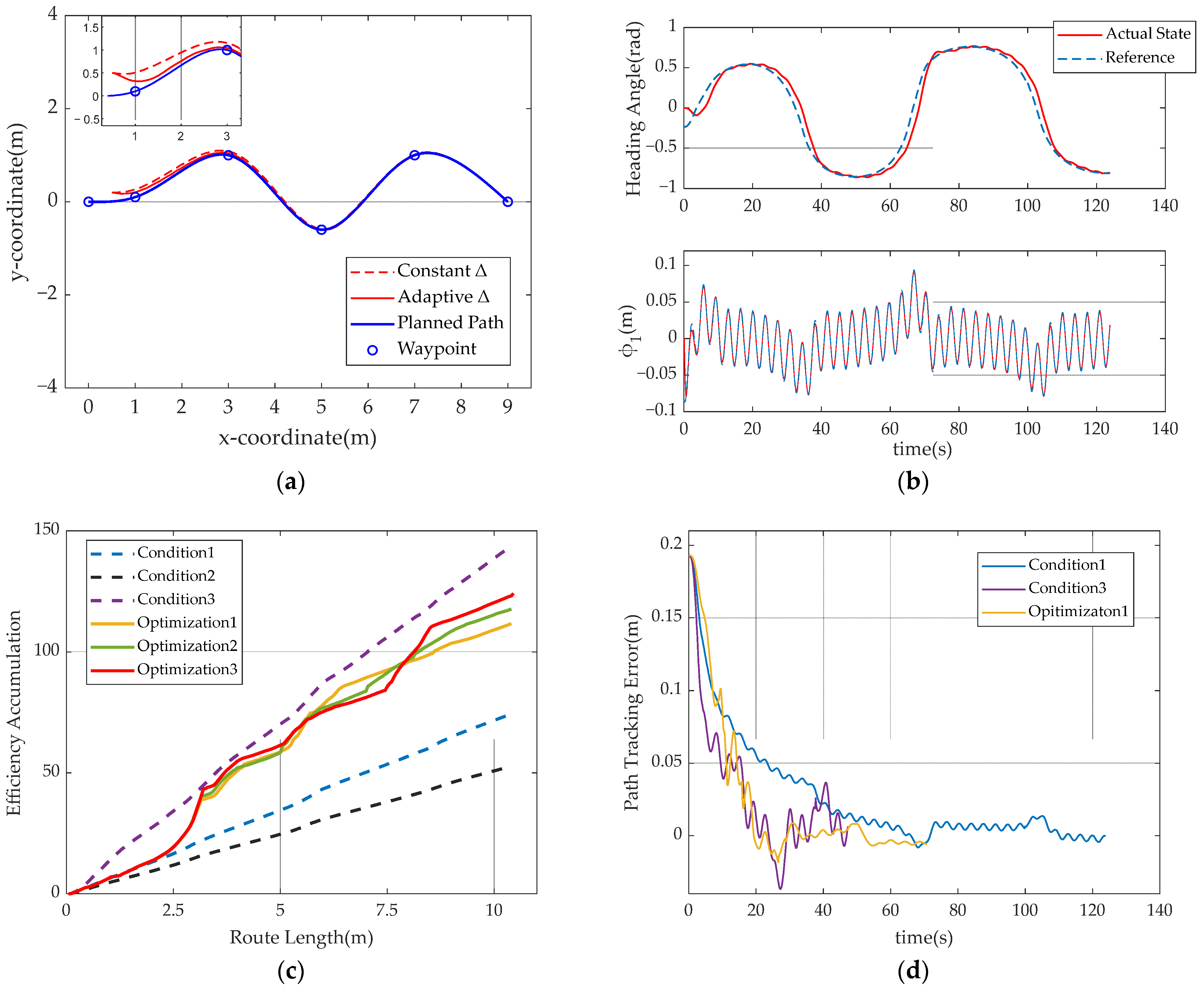
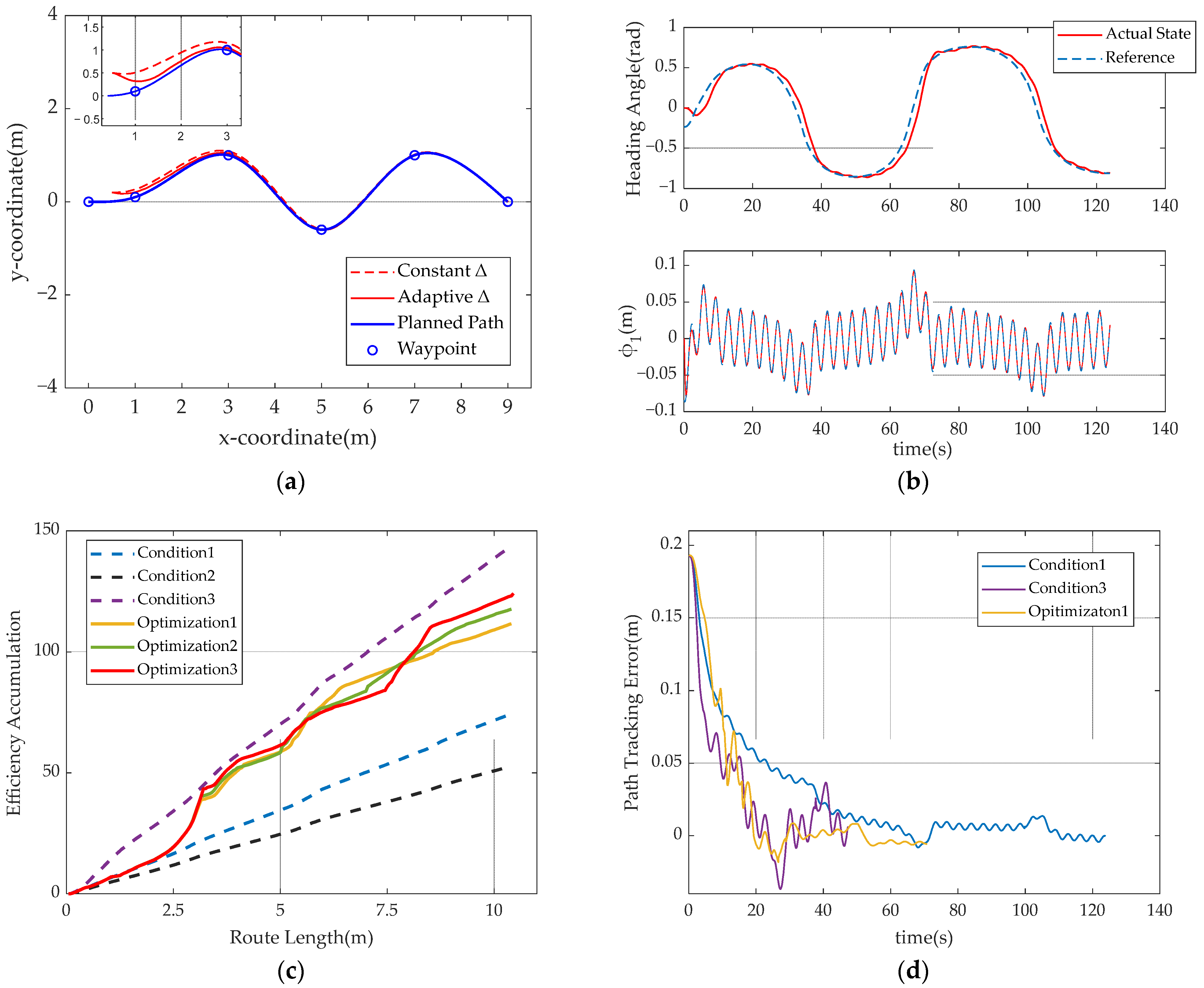
4.2.1. Closed-Loop Curve Path
4.2.2. Large Curvature Curve Path
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Borenstein, J.; Borrell, A. The OmniTread OT-4 serpentine robot. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 1766–1767. [Google Scholar]
- Wright, C.; Buchan, A.; Brown, B.; Geist, J.; Schwerin, M.; Rollinson, D.; Tesch, M.; Choset, H. Design and architecture of the unified modular snake robot. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–8 May 2012; pp. 4347–4354. [Google Scholar]
- Sugita, S.; Ogami, K.; Michele, G.; Hirose, S.; Takita, K. A Study on the Mechanism and Locomotion Strategy for New Snake-Like Robot Active Cord Mechanism—Slime model 1 ACM-S1. J. Robot. Mechatron. 2008, 20, 302–310. [Google Scholar] [CrossRef]
- Yamada, H.; Hirose, S. Development of practical 3-dimensional active cord mechanism ACM-R4. J. Robot. Mechatron. 2006, 18, 305–311. [Google Scholar] [CrossRef]
- Crespi, A.; Badertscher, A.; Guignard, A.; Ijspeert, A.J. AmphiBot I: An amphibious snake-like robot. Robot. Auton. Syst. 2005, 50, 163–175. [Google Scholar] [CrossRef] [Green Version]
- Liljeback, P.; Haugstuen, I.U.; Pettersen, K.Y. Path Following Control of Planar Snake Robots Using a Cascaded Approach. IEEE Trans. Control. Syst. Technol. 2011, 20, 111–126. [Google Scholar] [CrossRef] [Green Version]
- Kohl, A.M.; Pettersen, K.Y.; Kelasidi, E.; Gravdahl, J.T. Planar Path Following of Underwater Snake Robots in the Presence of Ocean Currents. IEEE Robot. Autom. Lett. 2016, 1, 383–390. [Google Scholar] [CrossRef] [Green Version]
- Zhang, D.; Yuan, H.; Cao, Z. Environmental adaptive control of a snake-like robot with variable stiffness actuators. IEEE/CAA J. Autom. Sin. 2020, 7, 745–751. [Google Scholar] [CrossRef]
- Bing, Z.S.; Chen, L.; Chen, G. Towards autonomous locomotion: CPG-based control of smooth 3D slithering gait transition of a snake-like robot. Bioinspiration Biomim. 2017, 12, 035001. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Gao, Q.; Zhao, H. CPG-Inspired Locomotion Control for a Snake Robot Basing on Nonlinear Oscillators. J. Intell. Robot. Syst. 2017, 85, 209–227. [Google Scholar] [CrossRef]
- Miao, Y.; Gao, F.; Zhang, Y. Gait fitting for snake robots with binary actuators. Sci. China Ser. E Technol. Sci. 2014, 57, 181–191. [Google Scholar] [CrossRef]
- Li, D.; Wang, C.; Deng, H.; Wei, Y.; Dongfang, L.; Chao, W.; Hongbin, D. Motion Planning Algorithm of a Multi-Joint Snake-Like Robot Based on Improved Serpenoid Curve. IEEE Access 2020, 8, 8346–8360. [Google Scholar] [CrossRef]
- Wang, G.; Yang, W.; Shen, Y.; Shao, H.; Wang, C. Adaptive Path Following of Underactuated Snake Robot on Unknown and Varied Frictions Ground: Theory and Validations. IEEE Robot. Autom. Lett. 2018, 3, 4273–4280. [Google Scholar] [CrossRef]
- Borhaug, E.; Pavlov, A.; Pettersen, K.Y. Integral LOS control for path following of underactuated marine surface vessels in the presence of constant ocean currents. In Proceedings of the 47th IEEE Conference on Decision and Control, Cancum, Mexico, 9–11 December 2008; pp. 4984–4991. [Google Scholar]
- Wang, X.; Wu, G. Modified LOS Path Following Strategy of a Portable Modular AUV Based on Lateral Movement. J. Mar. Sci. Eng. 2020, 8, 683. [Google Scholar] [CrossRef]
- Kelasidi, E.; Pettersen, K.Y.; Liljeback, P.; Gravdahl, J.T. Integral Line-of-Sight for path following of underwater snake robots. In Proceedings of the 2014 IEEE Conference on Control Applications, Antibes, France, 8–10 October 2014. [Google Scholar]
- Madhavan, S.; Antonios, T.; Brian, W.; Rafa, B. Co-operative path planning of multiple UAVs using Dubins paths with clothoidarcs. Control. Eng. Pract. 2010, 18, 1084–1092. [Google Scholar]
- Jolly, K.; Kumar, R.S.; Vijayakumar, R. A Bezier curve based path planning in a multi-agent robot soccer system without violating the acceleration limits. Robot. Auton. Syst. 2009, 57, 23–33. [Google Scholar] [CrossRef]
- Tian, L.; Collins, C. An effective robot trajectory planning method using a genetic algorithm. Mechatronics 2004, 14, 455–470. [Google Scholar] [CrossRef]
- Lekkas, A.; Fossen, T.I. Integral LOS Path Following for Curved Paths Based on a Monotone Cubic Hermite Spline Parametrization. IEEE Trans. Control. Syst. Technol. 2014, 22, 2287–2301. [Google Scholar] [CrossRef]
- Ariizumi, R.; Matsuno, F. Dynamic Analysis of Three Snake Robot Gaits. IEEE Trans. Robot. 2017, 33, 1075–1087. [Google Scholar] [CrossRef]
- Hasanzadeh, S.; Tootoonchi, A.A. Ground adaptive and optimized locomotion of snake robot moving with a novel gait. Auton. Robot. 2010, 28, 457–470. [Google Scholar] [CrossRef]
- Wang, Z.F.; Ma, S.G.; Li, B.; Wang, Y.C. Simulation and experimental study of an energy-based control method for the serpentine locomotion of a snake-like robot. Acta Autom. Sin. 2011, 37, 604–614. [Google Scholar]
- Cao, Z.; Zhang, D.; Hu, B.; Liu, J. Adaptive Path Following and Locomotion Optimization of Snake-Like Robot Controlled by the Central Pattern Generator. Complexity 2019, 2019, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Kelasidi, E.; Jesmani, M.; Pettersen, K.Y.; Gravdahl, J.T. Multi-objective optimization for efficient motion of underwater snake robots. Artif. Life Robot. 2016, 21, 411–422. [Google Scholar] [CrossRef] [Green Version]
- Duan, H.; Qiao, P. Pigeon-inspired optimization: A new swarm intelligence optimizer for air robot path planning. Int. J. Intell. Comput. Cybern. 2014, 7, 24–37. [Google Scholar] [CrossRef]
- Duan, H.; Huo, M.; Yang, Z.; Shi, Y.; Luo, Q. Predator-Prey Pigeon-Inspired Optimization for UAV ALS Longitudinal Parameters Tuning. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2347–2358. [Google Scholar] [CrossRef]
- Pei, J.; Su, Y.; Zhang, D. Fuzzy energy management strategy for parallel HEV based on pigeon-inspired optimization algorithm. Sci. China Ser. E Technol. Sci. 2017, 60, 425–433. [Google Scholar] [CrossRef]
- Liljeback, P.; Pettersen, K.Y.; Stavdahl, O.; Gravdahl, J.T. Snake Robots: Modelling, Mechatronics, and Control; Springer: London, UK, 2012. [Google Scholar]
- Kohl, A.M.; Pettersen, K.Y.; Kelasidi, E.; Gravdahl, J.T. Analysis of underwater snake robot locomotion based on a control-oriented model. In Proceedings of the 2015 IEEE Conference on Robotics and Biomimetics, Zhuhai, China, 6–9 December 2015; pp. 1930–1937. [Google Scholar]
- Kelasidi, E.; Liljeback, P.; Pettersen, K.Y.; Gravdahl, T. Innovation in Underwater Robots: Biologically Inspired Swimming Snake Robots. IEEE Robot. Autom. Mag. 2016, 23, 44–62. [Google Scholar] [CrossRef] [Green Version]
- Hirose, S. Biologically Inspired Robots: Snake-Like Locomotors and Manipulators; Oxford University Press: London, UK, 1993. [Google Scholar]
- Fredriksen, E.; Pettersen, K. Global κ-exponential way-point maneuvering of ships: Theory and experiments. Automatica 2006, 42, 677–687. [Google Scholar] [CrossRef]
- Sun, J.; Feng, B.; Xu, W. Particle swarm optimization with particles having quantum behavior. In Proceedings of the 2004 Congress on Evolutionary Computation, Portland, OR, USA, 19–23 June 2004; pp. 325–331. [Google Scholar]
- Liu, H.M.; Yan, X.S.; Wu, Q.H. An improved pigeon-inspired optimization algorithm and its application in parameter inversion. Symmetry 2019, 11, 1291. [Google Scholar] [CrossRef] [Green Version]
- Guo, R.; Zhao, R.X.; Wu, H.Z.; Ren, D.; Fan, J.W. Adaptive pigeon group algorithm with contraction factor for function optimization. Internet Things Technol. 2017, 7, 91–94. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Test Function | Expressions | Definition Domain | Optimal Solution |
|---|---|---|---|---|
| F1 | Sphere | [−100, 100] | (0, 0) | |
| F2 | Schwefel | [−500, 500] | (420.9687, 0) | |
| F3 | Rastrigin | [−10, 10] | (0, 0) | |
| F4 | Griewangk | [−600, 600] | (multi-extreme-points) |
| Function | PIO | IPIO | CFPIO | QPIO | |
|---|---|---|---|---|---|
| F1 | Mean | 0.5012 | 0.1147 | 0.0392 | 0 |
| STD | 0.7583 | 0.4522 | 0.1489 | 0 | |
| Min | 0 | 0 | 0 | 0 | |
| Max | 3.1724 | 2.2073 | 0.5681 | 0 | |
| Time(s) | Tmean | 1.0635 | 0.9297 | 0.9964 | 1.7328 |
| F2 | Mean | 2.2368 | 0.6955 | 1.1002 | 0.0785 |
| STD | 4.8849 | 1.6066 | 2.7023 | 0.2001 | |
| Min | 1.26 × 10−5 | 1.26 × 10−5 | 1.26 × 10−5 | 1.26 × 10−5 | |
| Max | 21.7294 | 7.5386 | 14.8372 | 0.6527 | |
| Time(s) | Tmean | 0.9651 | 1.0318 | 1.0229 | 2.0073 |
| F3 | Mean | 0.2019 | 0.0156 | 0.0041 | 0 |
| STD | 0.3766 | 0.0599 | 0.0144 | 0 | |
| Min | 0 | 0 | 0 | 0 | |
| Max | 1.2109 | 0.2866 | 0.0832 | 0 | |
| Time(s) | Tmean | 0.9380 | 1.0161 | 1.0818 | 1.8141 |
| F4 | Mean | 0.0786 | 0.0441 | 0.0048 | 0.0042 |
| STD | 0.1375 | 0.1114 | 0.0062 | 0.0041 | |
| Min | 0.0025 | 0.0025 | 0.0025 | 0.0025 | |
| Max | 0.5703 | 0.5482 | 0.0353 | 0.0239 | |
| Time(s) | Tmean | 0.9948 | 1.0005 | 1.0354 | 1.9682 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, B.; Jiao, M.; Zhang, X.; Zhang, D. Path Tracking of an Underwater Snake Robot and Locomotion Efficiency Optimization Based on Improved Pigeon-Inspired Algorithm. J. Mar. Sci. Eng. 2022, 10, 47. https://doi.org/10.3390/jmse10010047
Xu B, Jiao M, Zhang X, Zhang D. Path Tracking of an Underwater Snake Robot and Locomotion Efficiency Optimization Based on Improved Pigeon-Inspired Algorithm. Journal of Marine Science and Engineering. 2022; 10(1):47. https://doi.org/10.3390/jmse10010047
Chicago/Turabian StyleXu, Bo, Mingyu Jiao, Xianku Zhang, and Dalong Zhang. 2022. "Path Tracking of an Underwater Snake Robot and Locomotion Efficiency Optimization Based on Improved Pigeon-Inspired Algorithm" Journal of Marine Science and Engineering 10, no. 1: 47. https://doi.org/10.3390/jmse10010047
APA StyleXu, B., Jiao, M., Zhang, X., & Zhang, D. (2022). Path Tracking of an Underwater Snake Robot and Locomotion Efficiency Optimization Based on Improved Pigeon-Inspired Algorithm. Journal of Marine Science and Engineering, 10(1), 47. https://doi.org/10.3390/jmse10010047