Study on the Motion Stability of the Autonomous Underwater Helicopter


Abstract
:1. Introduction
2. Mathematical Model of Motion Stability
2.1. Dynamic Equation
2.2. Motion Stability Analysis
3. Numerical Simulation
3.1. Turbulence Model
3.2. Mesh Configuration and Boundary Conditions in Flow Domain
4. Results and Discussion
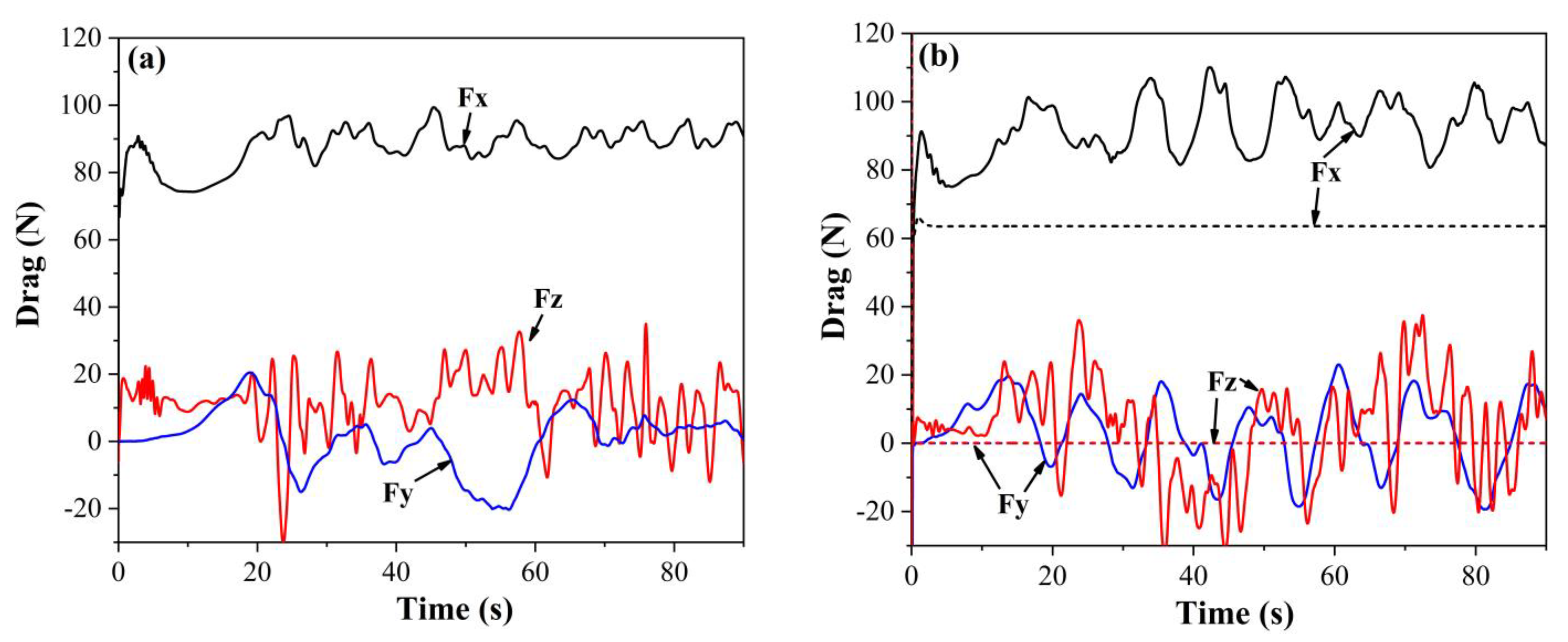
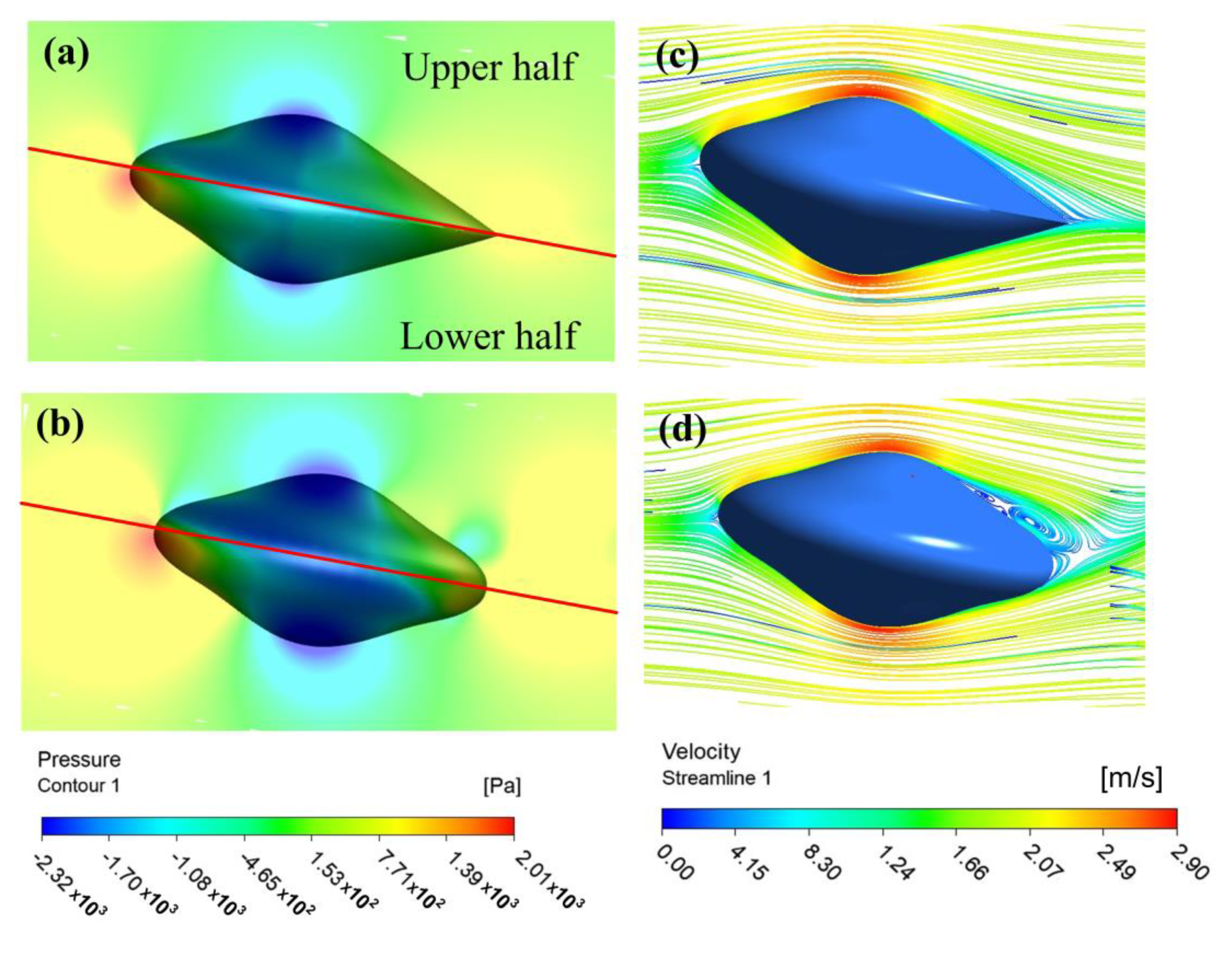
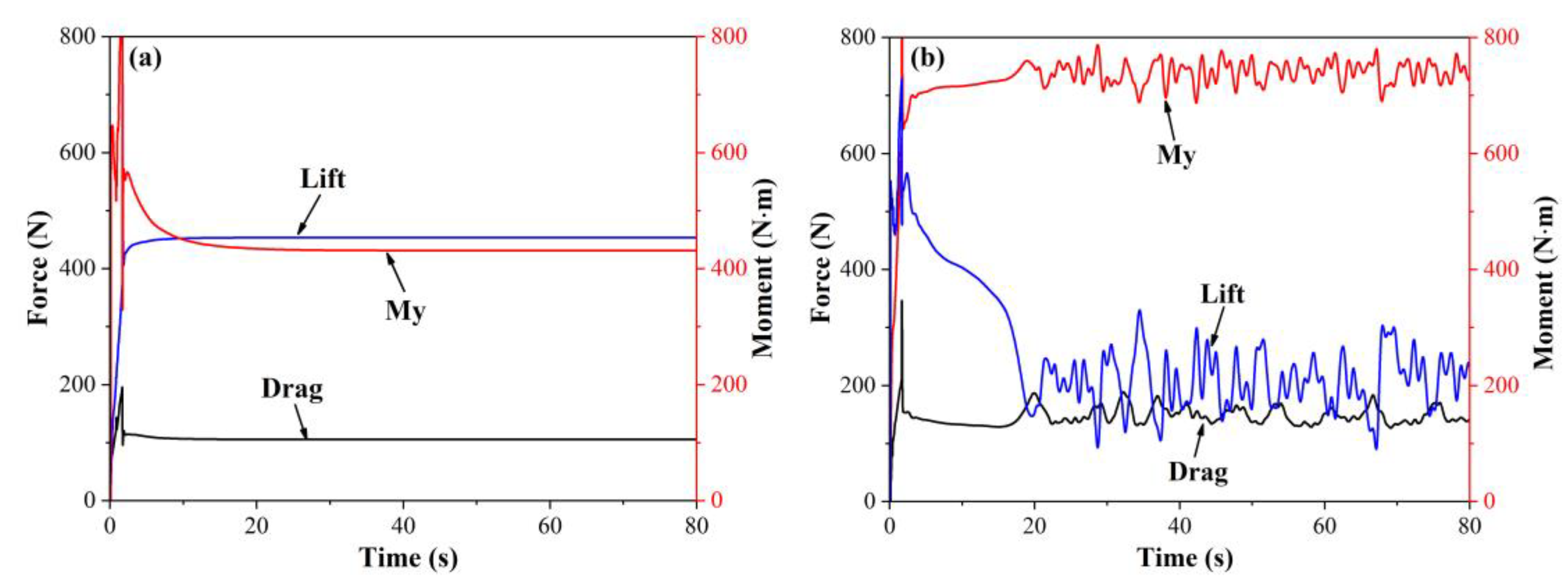
4.1. Hydrodynamic Analysis during Motions with Various Attitudes
4.1.1. Hydrodynamic Analysis at Zero AOA
4.1.2. Hydrodynamic Analysis with Non-Zero AOA
4.2. Stability Analysis According to Route Stability Criterion
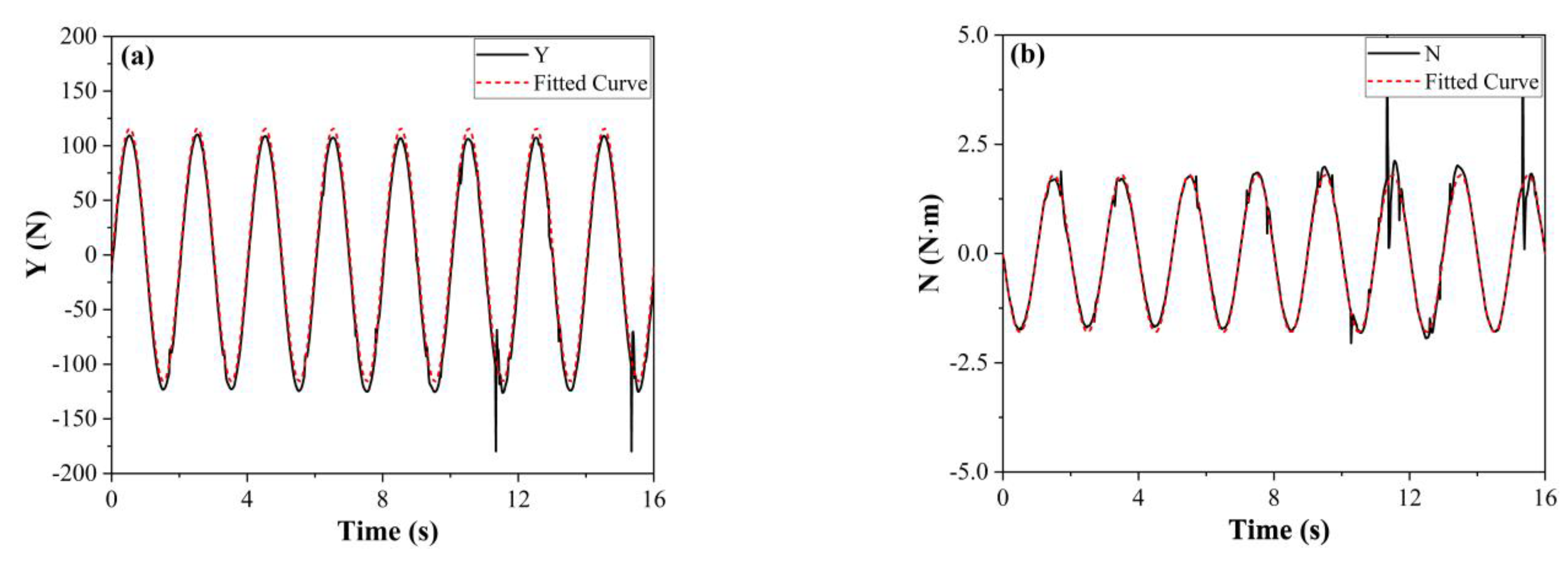
4.2.1. Numerical Simulation on Plane Motion Mechanism Test (PMM)
4.2.2. Hydrodynamic Coefficient Solution and Stability Analysis
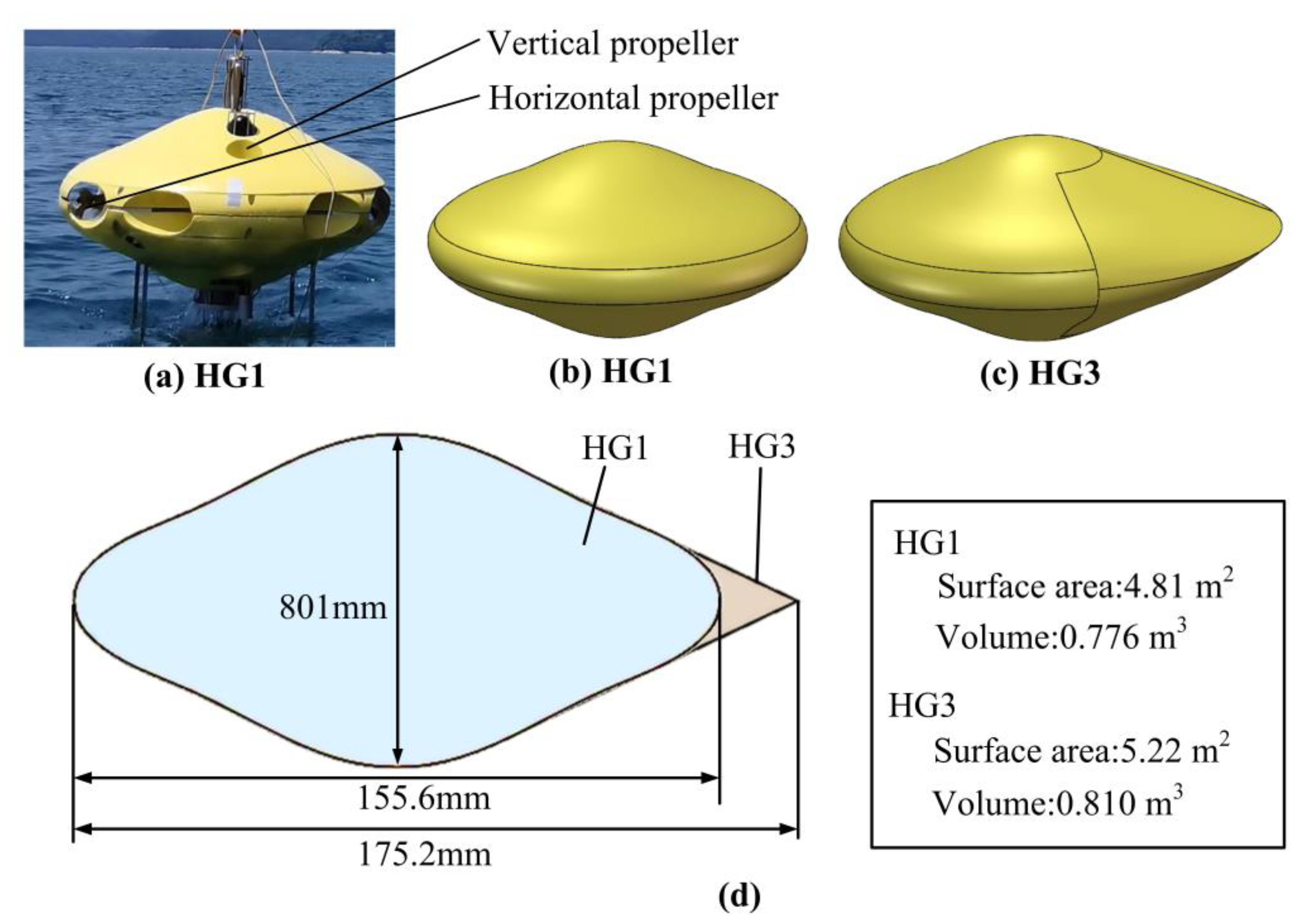
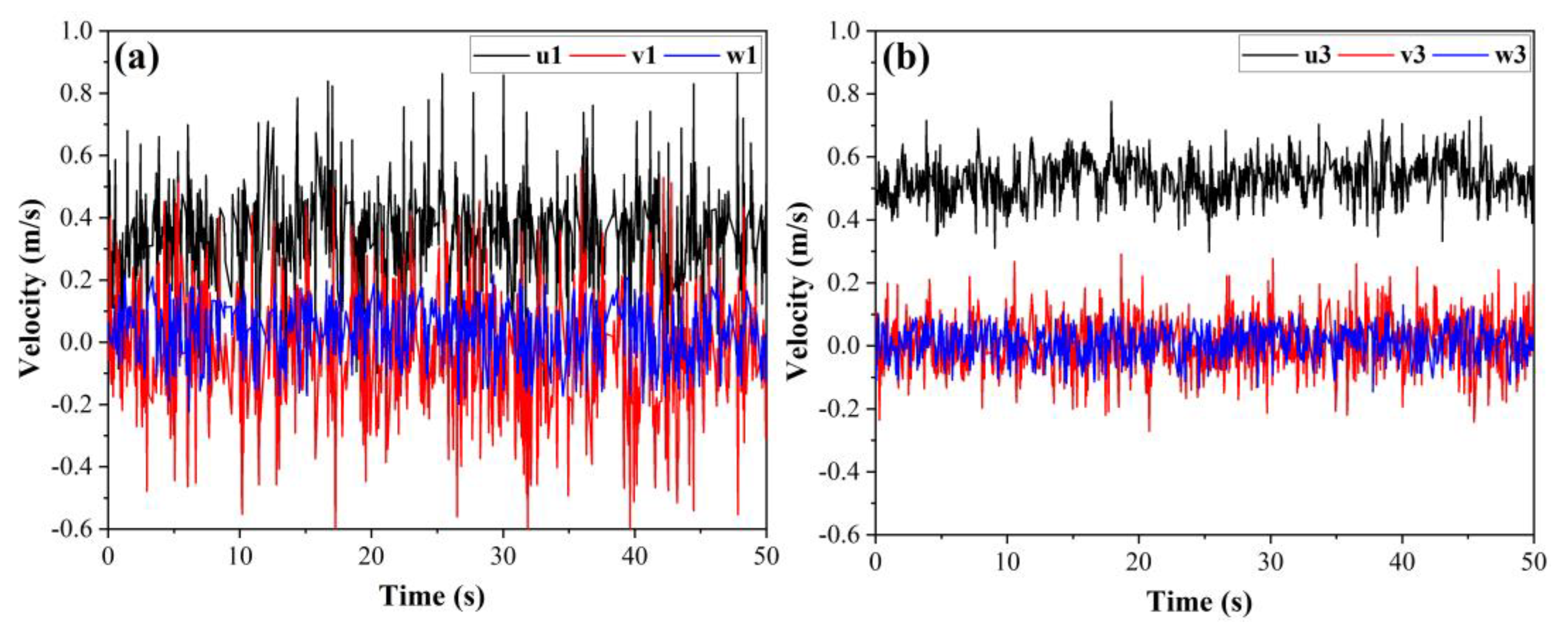
HG1
HG3
4.3. Experimental Validation with the Scale Model
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Gravity and buoyancy of AUH | |
| Thrust of propeller | |
| Installation radius of propeller | |
| Initial velocity of AUH | |
| Length of AUH | |
| , , | Surge velocity, sway velocity, heave velocity |
| Background flow velocity of pool experiment | |
| Derivative of surge velocity | |
| , , | Roll velocity, pitch velocity, yaw velocity |
| Overturning moment | |
| Frequency of harmonic motion | |
| Sway amplitude | |
| Spatial fixed coordinate system | |
| Motion coordinate system | |
| Vector position of center of gravity of vehicle | |
| Roll angle, pitch angle, yaw angle | |
| Moment of inertia of three axes | |
| Inertia product of moving system | |
| Hydrodynamic force in xyz direction | |
| Hydrodynamic moment in xyz direction | |
| External force and moment | |
| Static forces and moments | |
| Hydrodynamic forces and moments | |
| Environmental forces and moments | |
| Propulsion control force and moments | |
| Density of fluid | |
| Mass of AUH | |
| Stability index in horizontal and vertical plane | |
| Turbulent kinetic energy due to mean velocity gradients | |
| Turbulent kinetic energy due to buoyancy | |
| Fluctuating dilatation | |
| Constants | |
| Turbulent kinetic energy | |
| Dissipation rate | |
| Turbulent Prandtl numbers for and | |
| Inverse effective Prandtl numbers for and | |
| User-defined source terms | |
| First layer thickness | |
| Boundary layer thickness | |
| Partial derivative of with respect to | |
| Partial derivative of with respect to | |
| Partial derivative of with respect to |
References
- Zhu, J.J.; Sun, Z.X.; Lian, S.M.; Yin, J.P.; Li, Z.G. Review on Cabled Seafloor Observatories in the World. J. Trop. Oceanogr. 2017, 36, 20–33. [Google Scholar]
- Fenghua, L.; Yanguo, L.; Haibin, W.; Yonggang, G.; Fei, Z. Research Progress and Development Trend of Seafloor Observation Network. Bull. Chin. Acad. Sci. 2019, 34, 321–330. [Google Scholar]
- Qi, S.-P.; Li, Y.-Z. A Review of the Development and Current Situation of Marine Environment Observation Technology and Instruments. Shandong Sci. 2019, 32, 21–29. [Google Scholar]
- Bondaryk, J.E. Bluefin Autonomous Underwater Vehicles: Programs, Systems, and Acoustic Issues. J. Acoust. Soc. Am. 2004, 115, 2615. [Google Scholar] [CrossRef]
- Hagen, P.E.; Storkersen, N.J.; Vestgard, K. HUGIN-Use of UUV Technology in Marine Applications. In Proceedings of the Oceans’ 99. MTS/IEEE. Riding the Crest into the 21st Century. Conference and Exhibition. Conference Proceedings (IEEE Cat. No. 99CH37008), Seattle, WA, USA, 13–16 September 1999; IEEE: New York, NY, USA, 1999; Volume 2, pp. 967–972. [Google Scholar]
- Chance, T.; Kleiner, A.; Northcutt, J. The Autonomous Underwater Vehicle (AUV): A Cost-Effective Alternative to Deep-Towed Technology. Integr. Coast. Zone Manag. 2000, 2, 65–69. [Google Scholar]
- Allen, B.; Stokey, R.; Austin, T.; Forrester, N.; Goldsborough, R.; Purcell, M.; von Alt, C. REMUS: A Small, Low Cost AUV; System Description, Field Trials and Performance Results. In Proceedings of the Oceans’ 97. MTS/IEEE Conference Proceedings, Halifax, NS, Canada, 6–9 October 1997; IEEE: New York, NY, USA, 1997; Volume 2, pp. 994–1000. [Google Scholar]
- Pascoal, A.; Oliveira, P.; Silvestre, C.; Bjerrum, A.; Ishoy, A.; Pignon, J.-P.; Ayela, G.; Petzelt, C. MARIUS: An Autonomous Underwater Vehicle for Coastal Oceanography. IEEE Robot. Autom. Mag. 1997, 4, 46–59. [Google Scholar] [CrossRef]
- Tanakitkorn, K.; Wilson, P.A.; Turnock, S.R.; Phillips, A.B. Depth Control for an Over-Actuated, Hover-Capable Autonomous Underwater Vehicle with Experimental Verification. Mechatronics 2017, 41, 67–81. [Google Scholar] [CrossRef] [Green Version]
- Eriksen, C.C.; Osse, T.J.; Light, R.D.; Wen, T.; Lehman, T.W.; Sabin, P.L.; Ballard, J.W.; Chiodi, A.M. Seaglider: A Long-Range Autonomous Underwater Vehicle for Oceanographic Research. IEEE J. Ocean Eng. 2001, 26, 424–436. [Google Scholar] [CrossRef] [Green Version]
- Sherman, J.; Davis, R.E.; Owens, W.B.; Valdes, J. The Autonomous Underwater Glider “Spray”. IEEE J. Ocean Eng. 2001, 26, 437–446. [Google Scholar] [CrossRef] [Green Version]
- Stommel, H. The Slocum Mission. Oceanography 1989, 2, 22–25. [Google Scholar] [CrossRef]
- Bachmayer, R.; Leonard, N.E.; Graver, J.; Fiorelli, E.; Bhatta, P.; Paley, D. Underwater Gliders: Recent Developments and Future Applications. In Proceedings of the 2004 International Symposium on Underwater Technology (IEEE Cat. No. 04EX869), Taipei, Taiwan, 20–23 April 2004; IEEE: New York, NY, USA, 2004; pp. 195–200. [Google Scholar]
- Bettle, M.C.; Gerber, A.G.; Watt, G.D. Unsteady Analysis of the Six DOF Motion of a Buoyantly Rising Submarine. Comput. Fluids 2009, 38, 1833–1849. [Google Scholar] [CrossRef]
- Du, X.; Wang, H.; Hao, C.; Li, X. Analysis of Hydrodynamic Characteristics of Unmanned Underwater Vehicle Moving Close to the Sea Bottom. Def. Technol. 2014, 10, 76–81. [Google Scholar] [CrossRef]
- Phillips, A.; Furlong, M.; Turnock, S.R.B.T.-O. The Use of Computational Fluid Dynamics to Assess the Hull Resistance of Concept Autonomous Underwater Vehicles. In Proceedings of the OCEANS 2007-Europe, Aberdeen, UK, 18–21 June 2007; 2007; pp. 1–6. [Google Scholar]
- Phillips, A.B.; Turnock, S.R.; Furlong, M. The Use of Computational Fluid Dynamics to Aid Cost-Effective Hydrodynamic Design of Autonomous Underwater Vehicles. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2010, 224, 239–254. [Google Scholar] [CrossRef]
- Salari, M.; Rava, A. Numerical Investigation of Hydrodynamic Flow over an AUV Moving in the Water-Surface Vicinity Considering the Laminar-Turbulent Transition. J. Mar. Sci. Appl. 2017, 16, 298–304. [Google Scholar] [CrossRef]
- Sun, T.; Chen, G.; Yang, S.; Wang, Y.; Tan, H.; Zhang, L. Design and Optimization of a Bio-Inspired Hull Shape for AUV by Surrogate Model Technology. Eng. Appl. Comput. Fluid Mech. 2021, 15, 1057–1074. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, X.; Huang, H.; Chen, Y. Development of an Autonomous Underwater Helicopter with High Maneuverability. Appl. Sci. 2019, 9, 4072. [Google Scholar] [CrossRef] [Green Version]
- Wu, L.; Li, Y.; Su, S.; Yan, P.; Qin, Y. Hydrodynamic Analysis of AUV Underwater Docking with a Cone-Shaped Dock under Ocean Currents. Ocean Eng. 2014, 85, 110–126. [Google Scholar] [CrossRef]
- Jagadeesh, P.; Murali, K.; Idichandy, V.G. Experimental Investigation of Hydrodynamic Force Coefficients over AUV Hull Form. Ocean Eng. 2009, 36, 113–118. [Google Scholar] [CrossRef]
- Mitra, A.; Panda, J.P.; Warrior, H.V. Experimental and Numerical Investigation of the Hydrodynamic Characteristics of Autonomous Underwater Vehicles over Sea-Beds with Complex Topography. Ocean Eng. 2020, 198, 106978. [Google Scholar] [CrossRef] [Green Version]
- Mitra, A.; Panda, J.P.; Warrior, H.V. The Effects of Free Stream Turbulence on the Hydrodynamic Characteristics of an AUV Hull Form. Ocean Eng. 2019, 174, 148–158. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.-W.; Jiang, Y.; Huang, H.-C.; Ji, D.-X.; Sun, G.-Q.; Yu, Z.; Chen, Y. Computational Fluid Dynamics Study of the Motion Stability of an Autonomous Underwater Helicopter. Ocean Eng. 2017, 143, 227–239. [Google Scholar] [CrossRef]
- Chen, C.-W.; Chen, Y.; Cai, Q.-W. Hydrodynamic-Interaction Analysis of an Autonomous Underwater Hovering Vehicle and Ship with Wave Effects. Symmetry 2019, 11, 1213. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.-W.; Lu, Y.-F. Computational Fluid Dynamics Study of Water Entry Impact Forces of an Airborne-Launched, Axisymmetric, Disk-Type Autonomous Underwater Hovering Vehicle. Symmetry 2019, 11, 1100. [Google Scholar] [CrossRef] [Green Version]
- An, X.; Chen, Y.; Huang, H. Parametric Design and Optimization of the Profile of Autonomous Underwater Helicopter Based on Nurbs. J. Mar. Sci. Eng. 2021, 9, 668. [Google Scholar] [CrossRef]
- Lin, Y.; Huang, Y.; Zhu, H.; Huang, H.; Chen, Y. Simulation Study on the Hydrodynamic Resistance and Stability of a Disk-Shaped Autonomous Underwater Helicopter. Ocean Eng. 2021, 219, 108385. [Google Scholar] [CrossRef]
- Minnick, L.M. A Parametric Model for Predicting Submarine Dynamic Stability in Early Stage Design. Master’s Thesis, Virginia Tech, Blacksburg, VA, USA, 2006. [Google Scholar]
- Woolsey, C.A. Review of Marine Control. Systems: Guidance, Navigation, and Control of Ships, Rigs and Underwater Vehicles. J. Guid. Control Dyn. 2005, 28, 574–575. [Google Scholar] [CrossRef]
- Chen, C.W.; Kouh, J.S.; Tsai, J.F. Maneuvering Modeling and Simulation of AUV Dynamic Systems with Euler-Rodriguez Quaternion Method. China Ocean Eng. 2013, 27, 403–416. [Google Scholar] [CrossRef]
- Chen, C.W.; Kouh, J.S.; Tsai, J.F. Modeling and Simulation of an AUV Simulator with Guidance System. IEEE J. Ocean. Eng. 2013, 38, 211–225. [Google Scholar] [CrossRef]
- Fossen, T.I. Marine Control Systems–Guidance. Navigation, and Control of Ships, Rigs and Underwater Vehicles; Marine Cybernetics: Trondheim, Norway, 2002. [Google Scholar]
- Divsalar, K. Improving the Hydrodynamic Performance of the SUBOFF Bare Hull Model: A CFD Approach. Acta Mech. Sin. 2020, 36, 44–56. [Google Scholar] [CrossRef]
- Gao, T.; Wang, Y.; Pang, Y.; Cao, J. Hull Shape Optimization for Autonomous Underwater Vehicles Using CFD. Eng. Appl. Comput. Fluid Mech. 2016, 10, 599–607. [Google Scholar] [CrossRef] [Green Version]
- Hu, J.M.; Zhang, Y.R.; Xu, G.; Zhang, Z.Q. Numerical Analysis of Hydrodynamic Performance of Biomimetic Flapping Foils Based on the RANS Method. J. Intell. Fuzzy Syst. 2020, 38, 7553–7562. [Google Scholar] [CrossRef]
- Rattanasiri, P.; Wilson, P.A.; Phillips, A.B. Numerical Investigation of a Pair of Self-Propelled AUVs Operating in Tandem. Ocean Eng. 2015, 100, 126–137. [Google Scholar] [CrossRef] [Green Version]
- Shojaeefard, M.H.; Khorampanahi, A.; Mirzaei, M. RANS Study of Strouhal Number Effects on the Stability Derivatives of an Autonomous Underwater Vehicle. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 1–11. [Google Scholar] [CrossRef]
- Yakhot, V.; Orszag, S.A. Renormalization Group Analysis of Turbulence. I. Basic Theory. J. Sci. Comput. 1986, 1, 3–51. [Google Scholar] [CrossRef]
- Sitaraman, J.; Floros, M.; Wissink, A.; Potsdam, M.; Sankaran, V. Parallel Unsteady Overset Mesh Methodology for a Multi-Solver Paradigm with Adaptive Cartesian Grids. In Proceedings of the 26th AIAA Applied Aerodynamics Conference, Honolulu, HI, USA, 18–21 August 2008. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Diameter ) | Hight | Weight | Cruise Speed |
|---|---|---|---|---|
| Value | 1557 | 801 | 300 | 2 |
| Dimensionless Coefficient | Dimensionless Formula | Value | Dimensionless Coefficient | Dimensionless Formula | Value |
|---|---|---|---|---|---|
| −0.135 | −0.019 | ||||
| −0.033 | 0.043 | ||||
| −0.173 | −0.096 | ||||
| 0.117 | 0.056 | ||||
| 0.031 | −0.070 | ||||
| 0.555 | −0.499 | ||||
| 0.096 | −0.045 | ||||
| −0.778 | 0.103 | ||||
| −0.021 | 0.572 | ||||
| −0.154 | −0.068 | ||||
| −0.024 | 0.046 | ||||
| 0.00018 | −0.0037 | ||||
| 0.00026 | 0.034 | ||||
| 0.016 | −0.0068 | ||||
| −0.046 | −0.021 | ||||
| 0.0052 | 0.178 |
| Dimensionless Coefficient | Dimensionless Formula | Value | Dimensionless Coefficient | Dimensionless Formula | Value |
|---|---|---|---|---|---|
| −0.117 | 0 | ||||
| −0.05 | 0.027 | ||||
| −0.161 | −0.068 | ||||
| 0.017 | −0.002 | ||||
| 0.008 | −0.00066 | ||||
| −0.658 | −1.540 | ||||
| 0.288 | 0.0342 | ||||
| −0.155 | −0.056 | ||||
| 0.003 | 0.855 | ||||
| −0.141 | −0.041 | ||||
| −0.094 | 0.0269 | ||||
| −0.0005 | −0.00336 | ||||
| 0.0014 | 0 | ||||
| 0 | 0 | ||||
| −0.0218 | −0.0194 | ||||
| 0.000158 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, Y.; Guo, J.; Li, H.; Zhu, H.; Huang, H.; Chen, Y. Study on the Motion Stability of the Autonomous Underwater Helicopter. J. Mar. Sci. Eng. 2022, 10, 60. https://doi.org/10.3390/jmse10010060
Lin Y, Guo J, Li H, Zhu H, Huang H, Chen Y. Study on the Motion Stability of the Autonomous Underwater Helicopter. Journal of Marine Science and Engineering. 2022; 10(1):60. https://doi.org/10.3390/jmse10010060
Chicago/Turabian StyleLin, Yuan, Jin Guo, Haonan Li, Hai Zhu, Haocai Huang, and Ying Chen. 2022. "Study on the Motion Stability of the Autonomous Underwater Helicopter" Journal of Marine Science and Engineering 10, no. 1: 60. https://doi.org/10.3390/jmse10010060