
Time Domain Nonlinear Dynamic Response Analysis of Offshore Wind Turbines on Gravity Base Foundation under Wind and Wave Loads

Abstract
:1. Introduction
2. Nonlinear Dynamic Analysis of OWT on Gravity Base Foundation
2.1. Loads on the OWTs
2.2. Nonlinear Interaction between Soil and GBF
2.3. Analysis Model for the OWT on the GBF
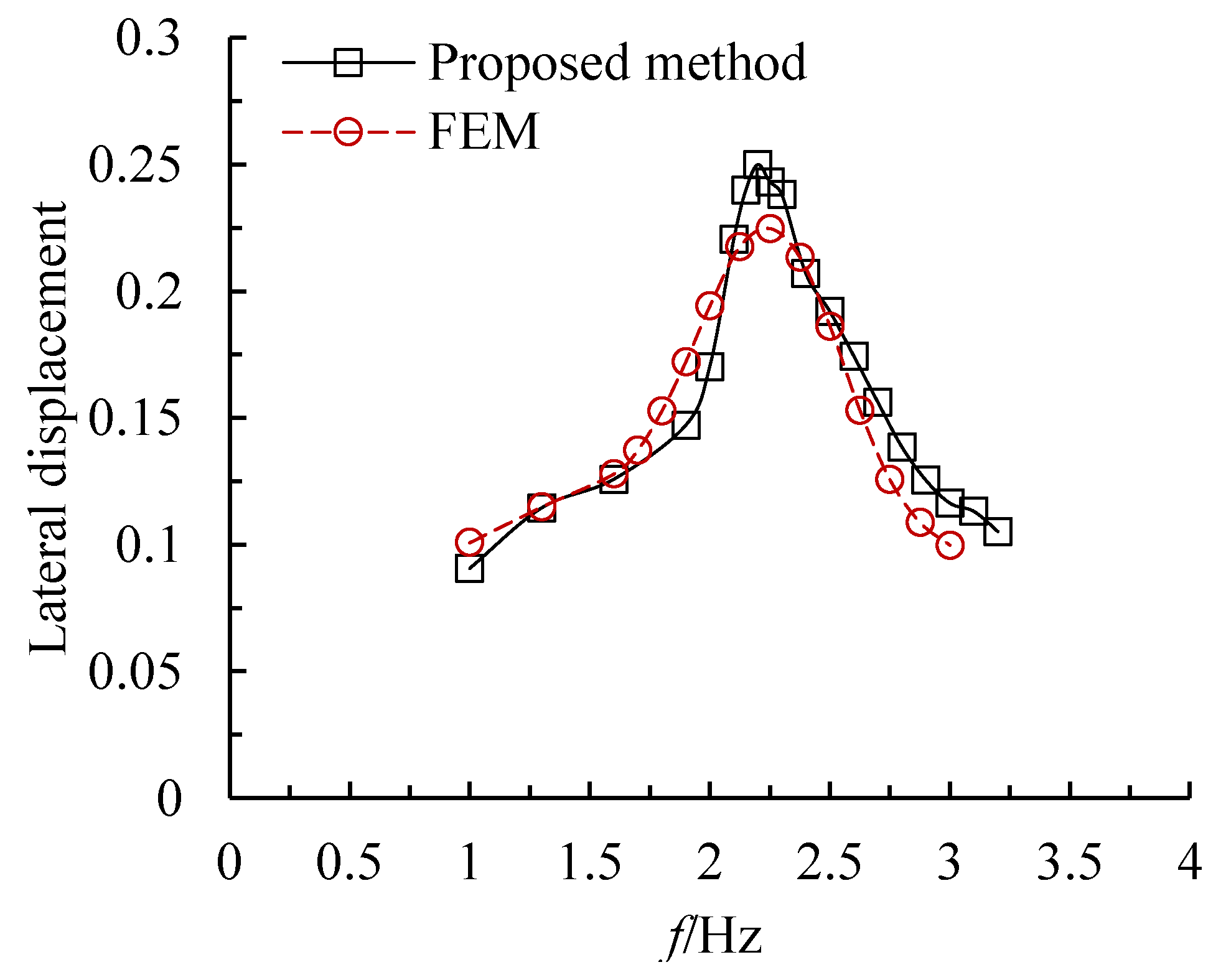
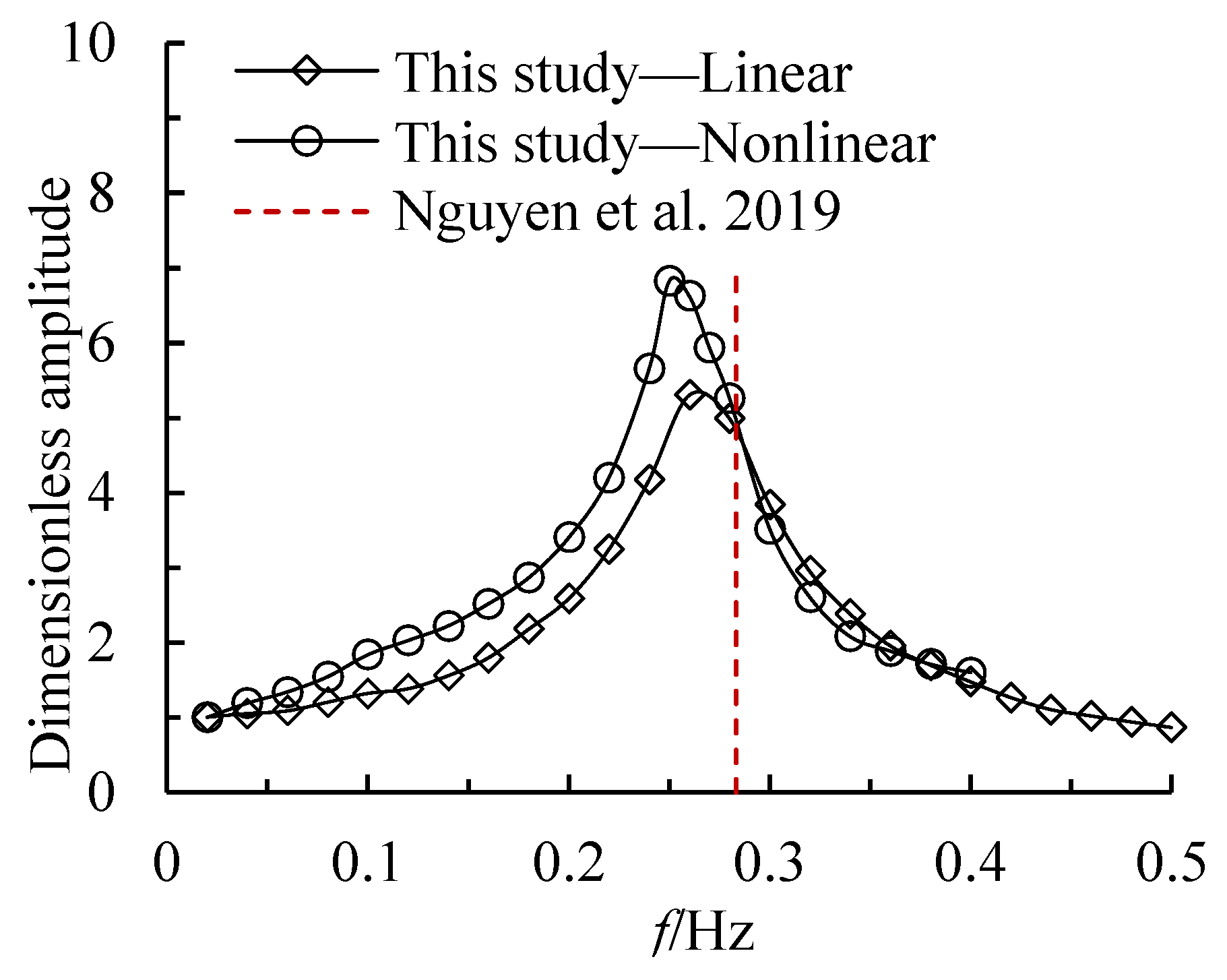
3. Verification of the Proposed Method
4. Performance of OWTs under Wind and Wave Loads
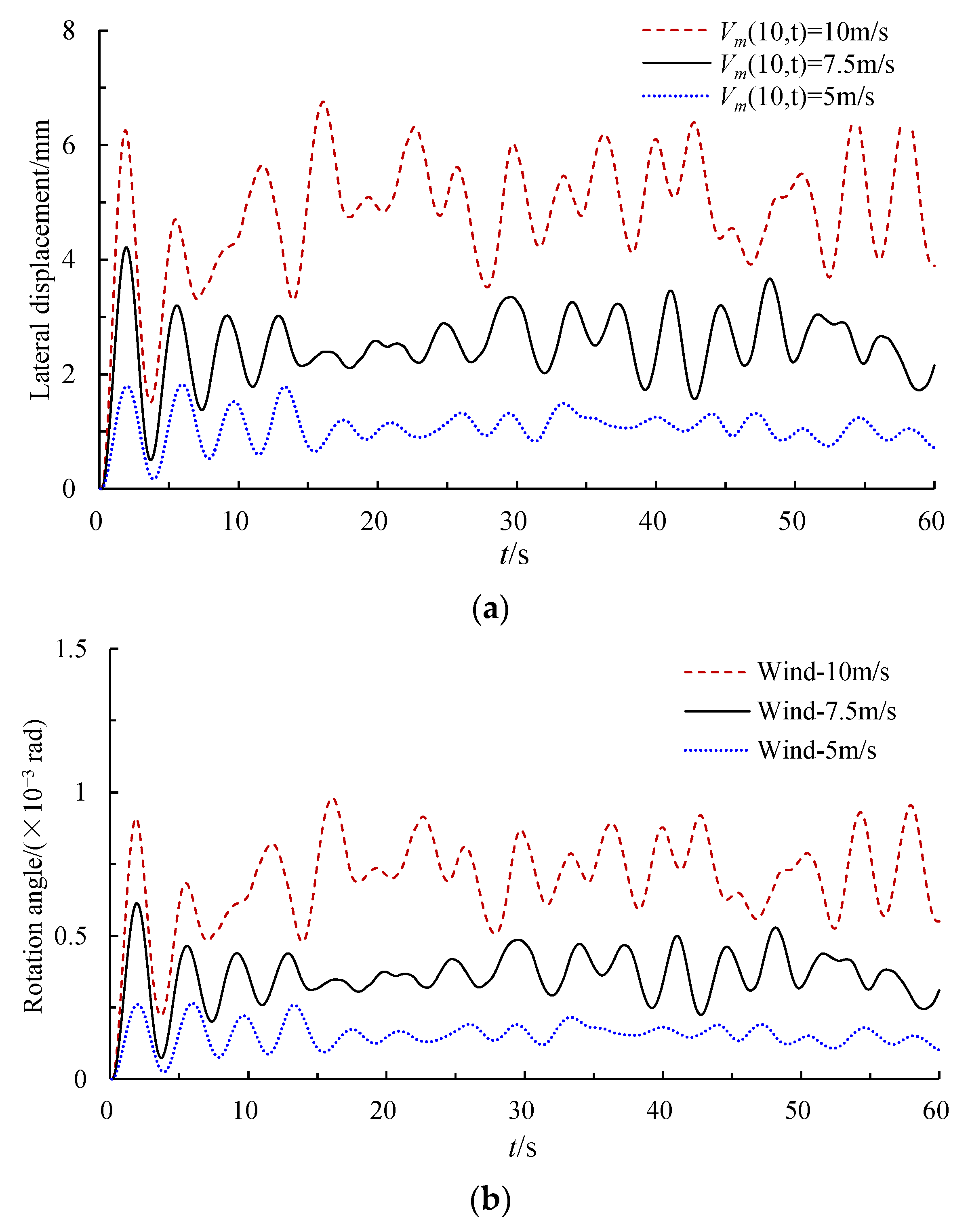
4.1. Response to the Wind Loads
4.2. Response to the Wave Loads
4.3. Response to the Combined Loads
5. Summary and Conclusions
- (1)
- A nonlinear dynamic analysis model for the offshore wind turbine supported on GBF was proposed, in which the GBF is simplified as a rigid foundation and the wind turbine tower is simulated as a structure composed of several elastic beams. The proposed time domain method considering soil nonlinearity provides a good estimation of the time history of the dynamic response of the OWT supported on the GBF.
- (2)
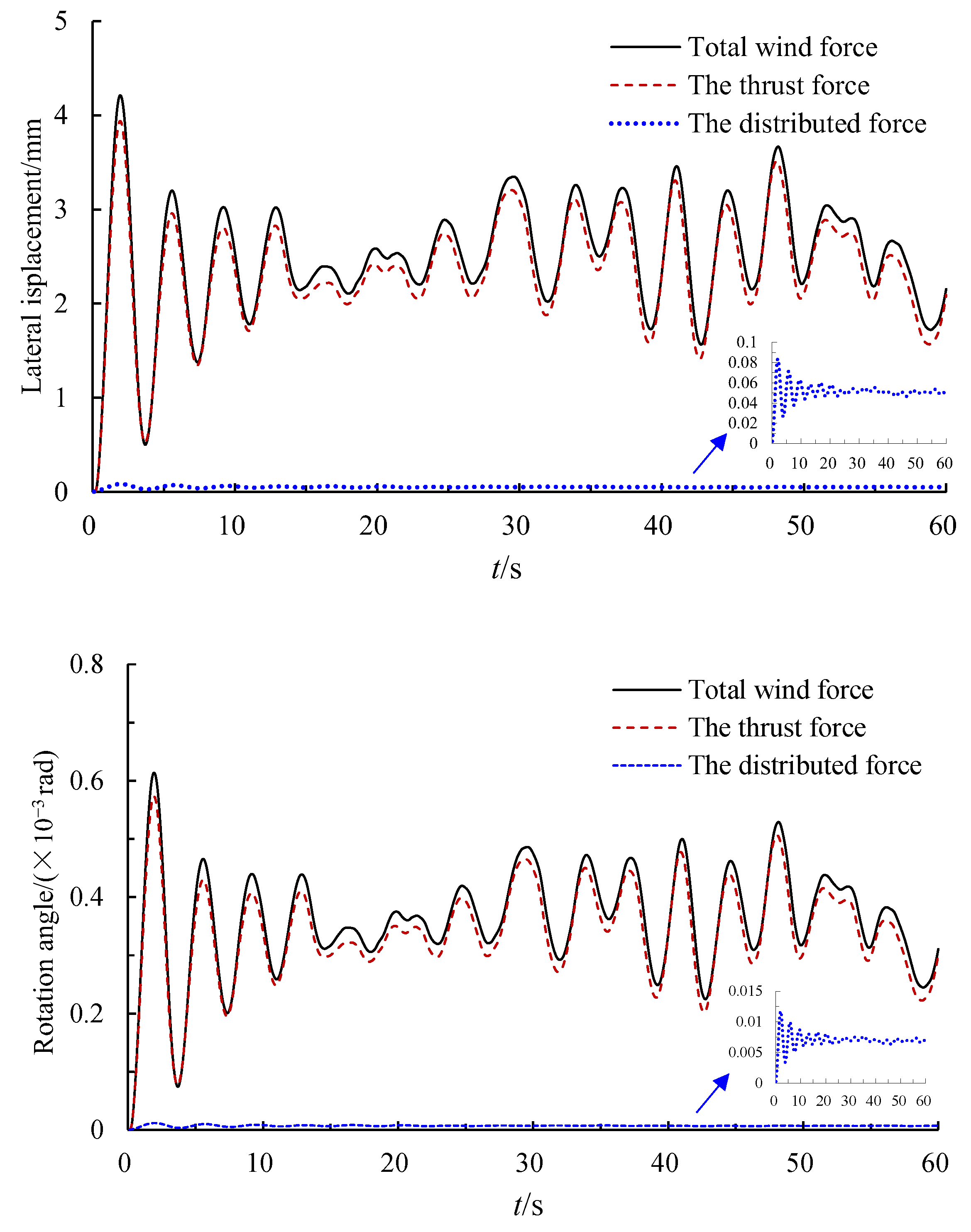
- The peak displacement of the GBF increases significantly with the increase of the mean wind velocity . It can be found that a large increment of displacement in the horizontal direction will occur at the beginning of the loading stage when the OWT supported on the GBF is subjected to the wind load, and the lateral dynamic responses of the GBF are more affected by the thrust force acting on the structure than by the distributed load.
- (3)
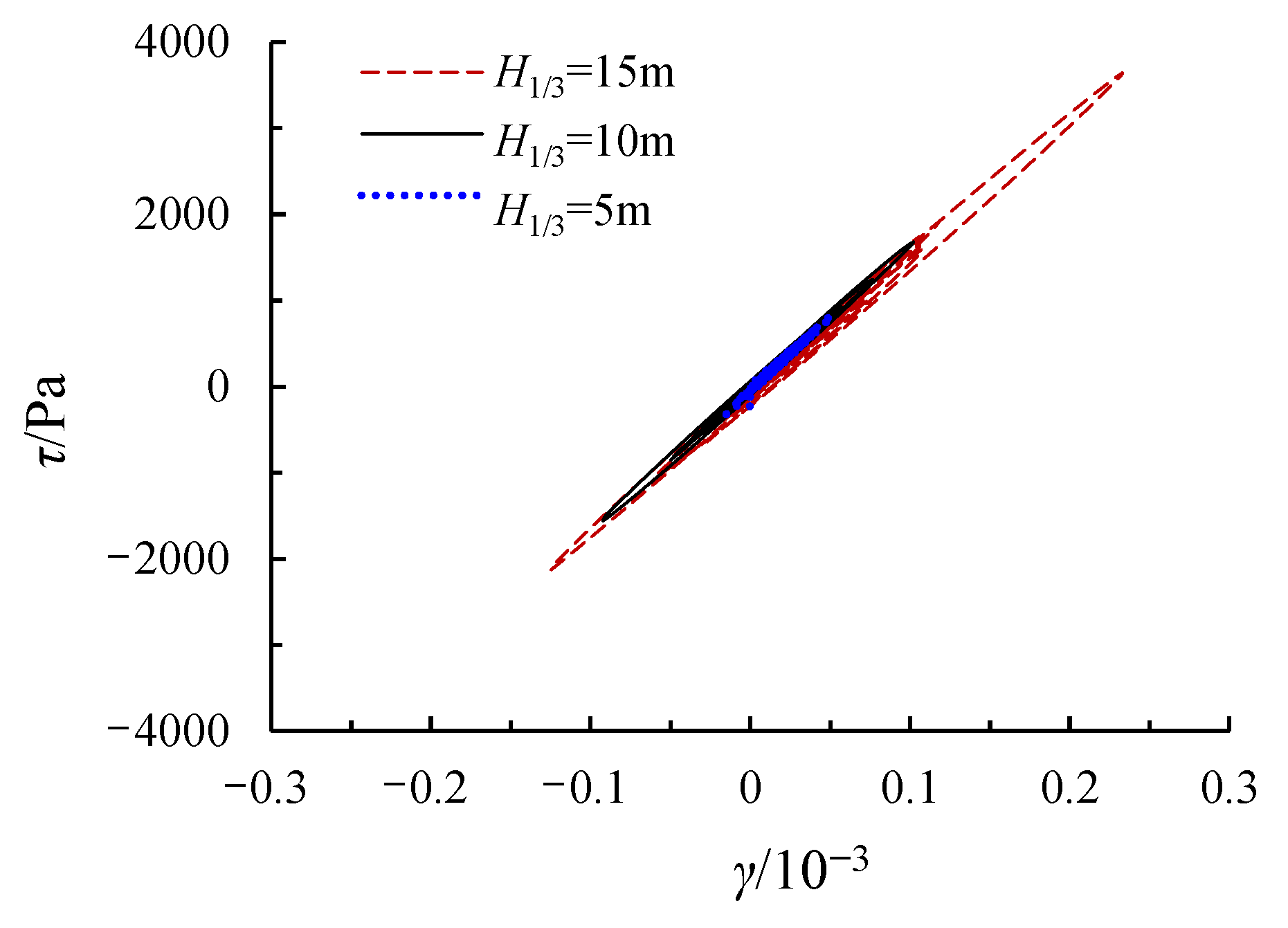
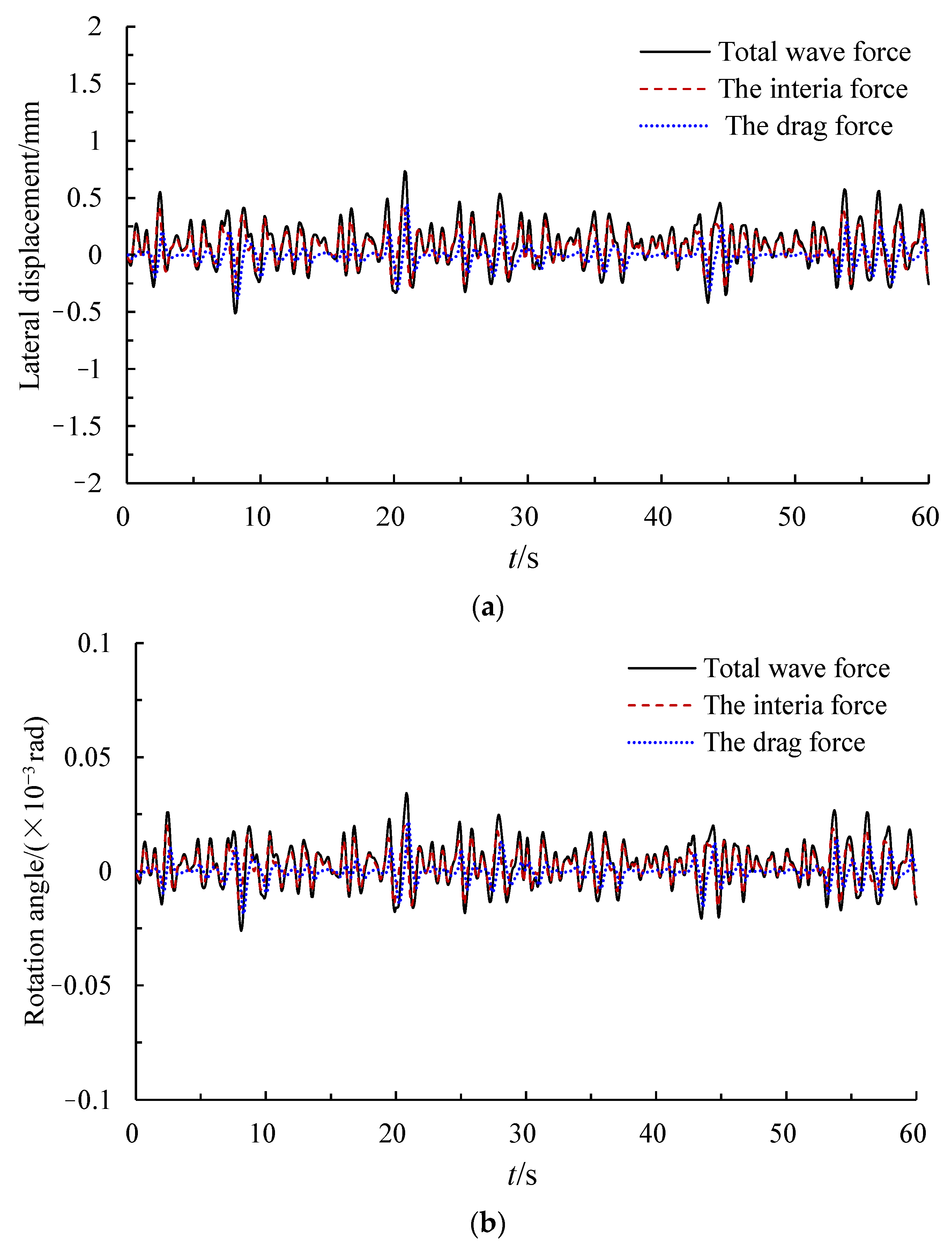
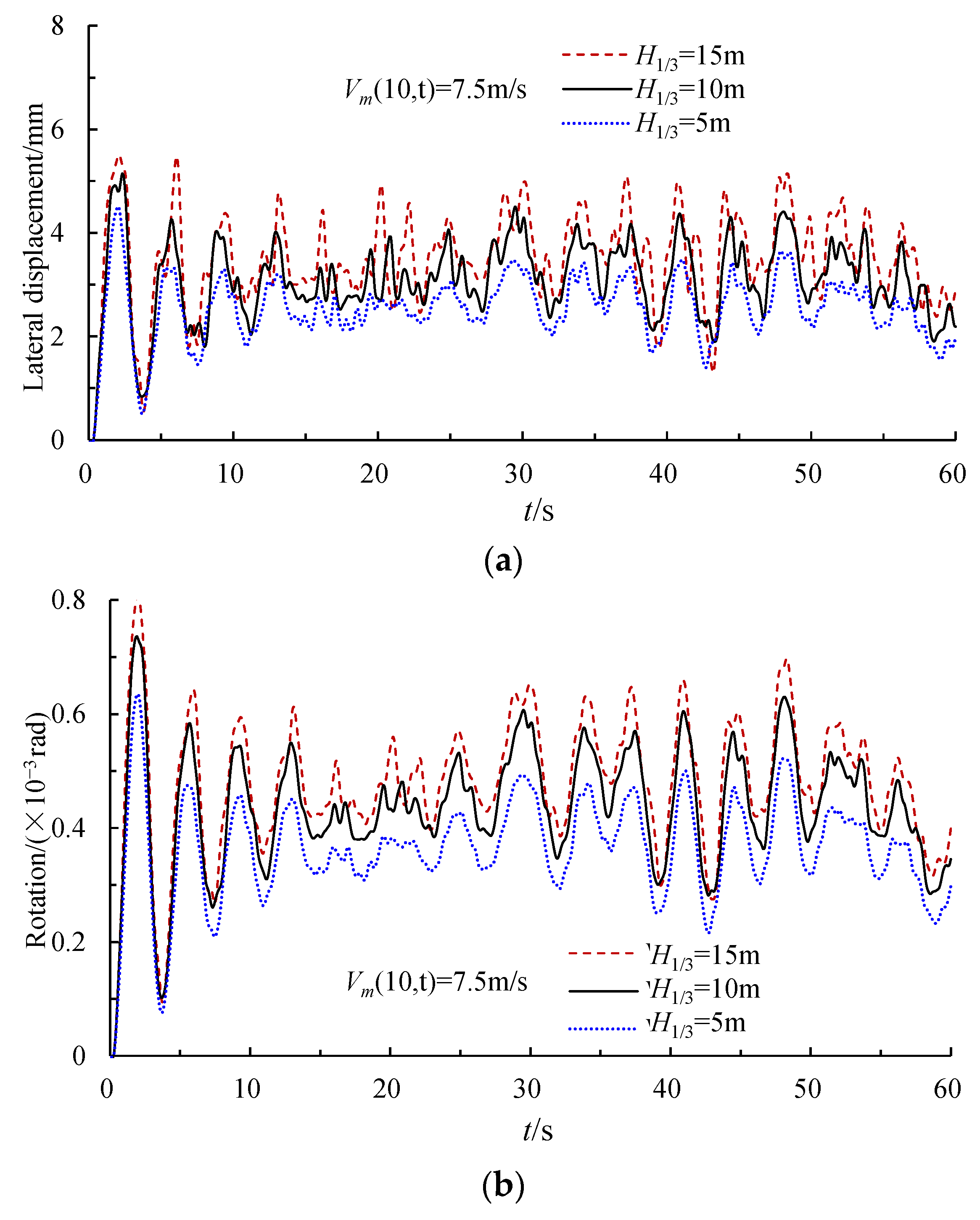
- The significant wave height H1/3 is the main factor in determining the dynamic response of the OWTs supported on a GBF under wave loading. The dynamic response of the GBF increases as the H1/3 increases, and the dynamic response of the GBF caused by the drag force is smaller than that of the GBF caused by the inertia force when H1/3 is the same. However, the maximum dynamic displacement of the GBF caused by the drag force is almost the same as that of the GBF caused by the inertia force.
- (4)
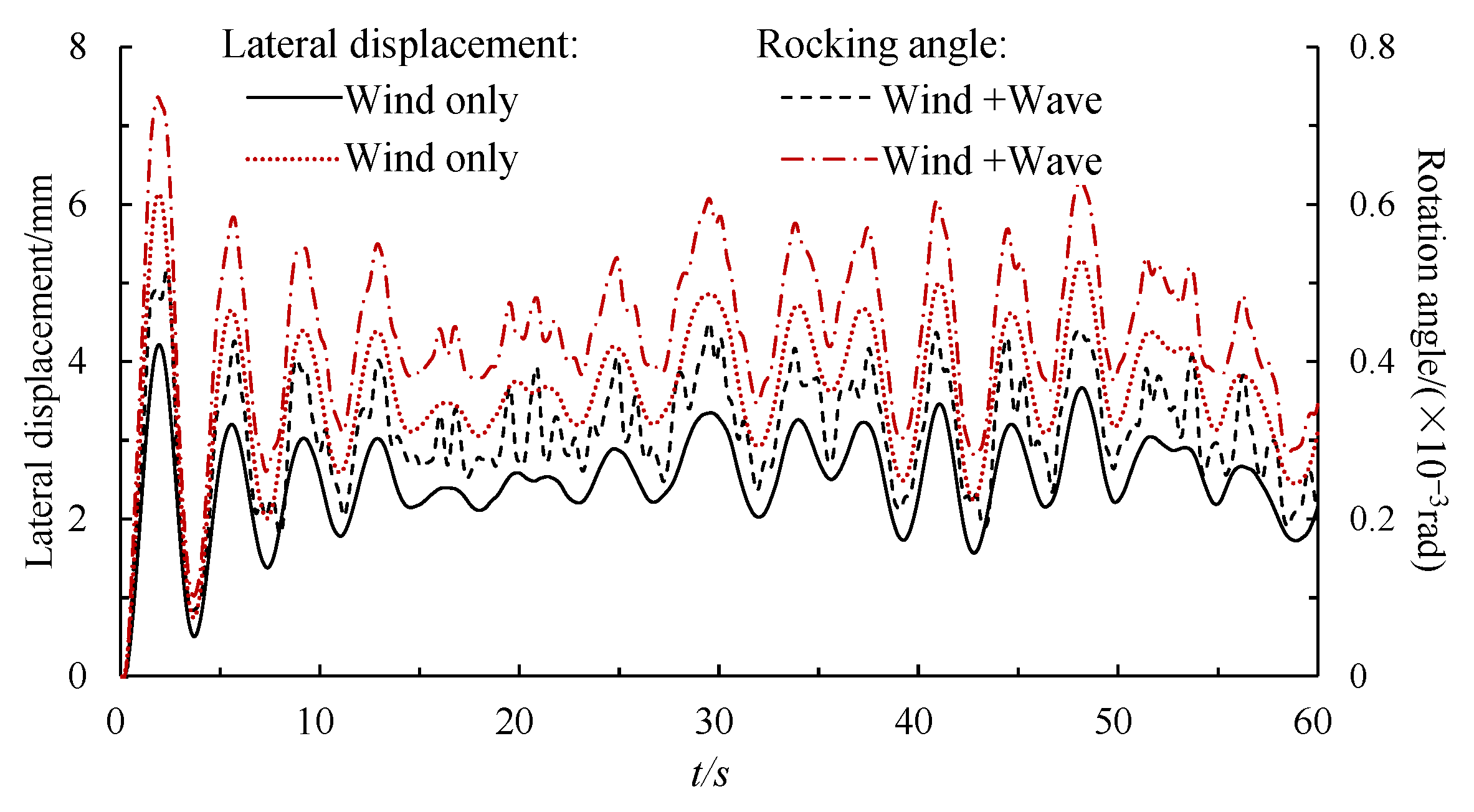
- The time history curves of the dynamic response of the GBF under combined wind and wave loads show a similar trend to that of the dynamic response of the GBF under the wind loads only. However, the time history curves of the lateral displacement and rotation angle atop the GBF under the wind loads only oscillate more smoothly than that of the lateral displacement and rotation angle atop the GBF under the combined wind and wave loads.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Wu, X.; Hu, Y.; Li, Y.; Jian, Y.; Duan, L.; Wang, T.H.; Adcock, T.; Jiang, Z.Y.; Gao, Z.; Lin, Z.L.; et al. Foundations of offshore wind turbines: A review. Renew. Sustain. Energy Rev. 2019, 104, 379–393. [Google Scholar] [CrossRef] [Green Version]
- Cai, X.; Yang, R.X.; Zhou, J.Q.; Fang, Z.X.; Yang, M.Y.; Shi, X.Q.; Chen, Q. Review on Offshore Wind Power Integration via DC Transmission. Automa. Electr. Power Syst. 2021, 45, 2–22. (In Chinese) [Google Scholar] [CrossRef]
- Díaz, H.; Soares, C.G. Review of the current status, technology and future trends of offshore wind farms. Ocean Eng. 2020, 209, 107381. [Google Scholar] [CrossRef]
- Sun, X.; Huang, D.; Wu, G. The current state of offshore wind energy technology development. Energy 2012, 41, 298–312. [Google Scholar] [CrossRef]
- European Wind Energy Association. Offshore Wind Market Report: 2021 Edition. Available online: https://www.energy.gov/eere/wind/articles/offshore-wind-market-report-2021-edition-released (accessed on 10 September 2022).
- Peire, K.; Nonneman, H.; Bosschem, E. Gravity base foundations for the thornton bank offshore wind farm. Terra Aqua 2009, 115, 19–29. [Google Scholar]
- Schallenberg-Rodríguez, J.; Montesdeoca, N.G. Spatial planning to estimate the offshore wind energy potential in coastal regions and islands. Practical case: The Canary Islands. Energy 2018, 143, 91–103. [Google Scholar] [CrossRef]
- Tricklebank, A.H.; Magee, B.; Halberstadt, P.H. Concrete towers for onshore and offshore wind farms. Concr. Cent. Surrey 2007, 19, 217. [Google Scholar]
- Futai, M.M.; Haigh, S.K.; Madabhushi, G.S.P. Comparison of the dynamic responses of monopiles and gravity base foundations for offshore wind turbines in sand using centrifuge modelling. Soil. Found. 2021, 61, 50–63. [Google Scholar] [CrossRef]
- Esteban, M.D.; López-Gutiérrez, J.S.; Negro, V. Gravity-based foundations in the offshore wind sector. J. Mar. Sci. Eng. 2019, 7, 64. [Google Scholar] [CrossRef] [Green Version]
- Esteban, M.D.; Couñago, B.; López-Gutiérrez, J.S.; Negroa, V.; Vellisco, F. Gravity based support structures for offshore wind turbine generators: Review of the installation process. Ocean. Eng. 2015, 110, 281–291. [Google Scholar] [CrossRef]
- Guan, M.K.; Zhang, X.F.; Xiang, X.; Zhang, Q.; Ke, Y.S. Research on the construction technology of offshore wind turbine on gravity base foundation. China Water Transp. 2019, 19, 170–172. (In Chinese) [Google Scholar]
- Mathern, A.; Von der Haar, C.; Marx, S. Concrete support structures for offshore wind turbines: Current status, challenges, and future trends. Energies 2021, 14, 1995. [Google Scholar] [CrossRef]
- Koekkoek, R.T. Gravity Base Foundations for Offshore Wind Turbines; Delft University of Technology: Delft, The Netherlands, 2015. [Google Scholar]
- Vahdatirad, M.J.; Griffiths, D.V.; Andersen, L.V.; Andersen, L.; Sørensen, V. Reliability analysis of a gravity-based foundation for wind turbines: A code-based design assessment. Géotechnique 2014, 64, 635–645. [Google Scholar] [CrossRef]
- Zachert, H.; Wichtmann, T.; Kudella, P.; Triantafyllidis, T. Inspection of a high-cycle accumulation model for sand based on recalculations of a full-scale test on a gravity base foundation for offshore wind turbines. Comput. Geotech. 2020, 126, 103727. [Google Scholar] [CrossRef]
- Liang, F.Y.; Yuan, Z.C.; Liang, X.; Zhang, H. Seismic response of monopile-supported offshore wind turbines under combined wind, wave and hydrodynamic loads at scoured sites. Comput. Geotech. 2022, 144, 104640. [Google Scholar] [CrossRef]
- He, R.; Wang, L. Elastic rocking vibration of an offshore Gravity Base Foundation. Appl. Ocean. Res. 2016, 55, 48–58. [Google Scholar] [CrossRef]
- Yu, L.; Wang, L.Z.; Guo, Z.; Bhattacharya, S.; Nikitas, G.; Li, L.-L.; Xing, Y.-L. Long-term dynamic behavior of monopile supported offshore wind turbines in sand. Theor. Appl. Mech. Lett. 2015, 5, 80–84. [Google Scholar] [CrossRef] [Green Version]
- Witcher, D. Seismic analysis of wind turbines in the time domain. Wind Energy 2005, 8, 81–91. [Google Scholar] [CrossRef]
- Lian, J.J.; Yan, X.; Wang, H.J. Dynamic characteristic analysis of new type gravity infrastructure for offshore wind turbine. Acta Energy Sol. Sin. 2016, 37, 1624–1630. (In Chinese) [Google Scholar]
- Li, Y.; Ong, M.C.; Tang, T. Numerical analysis of wave-induced poro-elastic seabed response around a hexagonal gravity-based offshore foundation. Coast. Eng. 2018, 136, 81–95. [Google Scholar] [CrossRef]
- Cui, L.; Jeng, D.S.; Liu, J. Numerical analysis of the seabed liquefaction around a fixed gravity-based structure (GBS) of an offshore platform and protection. Ocean Eng. 2022, 249, 110844. [Google Scholar] [CrossRef]
- Nguyen, C.U.; Lee, S.Y.; Kim, H.T.; Kim, J.T. Vibration-based damage assessment in gravity-based wind turbine tower under various waves. Shock Vib. 2019, 2019, 1406861. [Google Scholar] [CrossRef] [Green Version]
- Damgaard, M.; Andersen, L.V.; Ibsen, L.B. Computationally efficient modelling of dynamic soil–structure interaction of offshore wind turbines on gravity footings. Renew. Energy 2014, 68, 289–303. [Google Scholar] [CrossRef]
- Borja, R.I.; Wu, W.H.; Amies, A.P.; Smith, H.A. Nonlinear lateral, rocking, and torsional vibration of rigid foundations. Int. J. Geotech. Eng. 1994, 120, 491–513. [Google Scholar] [CrossRef]
- Anastasopoulos, I.; Kontoroupi, T. Simplified approximate method for analysis of rocking systems accounting for soil inelasticity and foundation uplifting. Soil Dyn. Earthq. Eng. 2014, 56, 28–43. [Google Scholar] [CrossRef]
- Bhattacharya, S.; Nikitas, N.; Garnsey, J.; Alexander, N.A.; Cox, J.; Lombardi, D.; Muir Wood, D.; Nash, D.F.T. Observed dynamic soil-structure interaction in scale testing of offshore wind turbine foundations. Soil Dyn. Earthq. Eng. 2013, 54, 47–60. [Google Scholar] [CrossRef]
- Gözcü, O.M.; Farsadi, T.; Tola, C.; Kayran, A. Assessment of the effect of hybrid grfp-cfrp usage in wind turbine blades on the reduction of fatigue damage equivalent loads in the wind turbine system. In Proceedings of the 33rd Wind Energy Symposium, Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar]
- Şener, Ö.; Farsadi, T.; Ozan Gözcü, M.; Kayran, A. Evaluation of the effect of spar cap fiber angle of bending–torsion coupled blades on the aero-structural performance of wind turbines. J. Sol. Energy Eng. Aug. 2018, 140, 041004. [Google Scholar] [CrossRef]
- Yu, H.; Zeng, X.; Li, B.; Lian, J. Centrifuge modeling of offshore wind foundations under earthquake loading. Soil Dyn. Earthq. Eng. 2015, 77, 402–415. [Google Scholar] [CrossRef]
- Kim, B.J.; Plodpradit, P.; Kim, K.D.; Kim, H.G. Three-dimensional analysis of prestressed concrete offshore wind turbine structure under environmental and 5-MW turbine loads. J. Mar. Sci. Appl. 2018, 17, 625–637. [Google Scholar] [CrossRef]
- Pavlou, D.G. Soil–structure–wave interaction of gravity-based offshore wind turbines: An analytical model. J. Offshore Mech. Arct. 2021, 143, 032101. [Google Scholar] [CrossRef]
- Yu, H.; Zeng, X.W. Seismic behavior of offshore wind turbine with gravity foundation. J. Geol. Resour. Eng. 2013, 1, 46–54. [Google Scholar] [CrossRef] [Green Version]
- Wang, P.G.; Zhao, M.; Du, X.L.; Liu, J.B.; Xu, C.S. Wind, wave and earthquake responses of offshore wind turbine on monopile foundation in clay. Soil Dyn. Earthq. Eng. 2018, 113, 47–57. [Google Scholar] [CrossRef]
- Cheng, X.L.; Cheng, W.L.; Wang, P.G.; El Naggar, M.H.; Zhang, J.X.; Liu, Z.X. Response of offshore wind turbine tripod suction bucket foundation to seismic and environmental loading. Ocean. Eng. 2022, 257, 111708. [Google Scholar] [CrossRef]
- Van Binh, L.; Ishihara, T.; Van Phuc, P.; Fujino, Y. A peak factor for non-Gaussian response analysis of wind turbine tower. J. Wind Eng. Ind. Aerod. 2008, 96, 2217–2227. [Google Scholar] [CrossRef]
- Lee, S.; Kim, H.; Lee, S. Analysis of aerodynamic characteristics on a counter-rotating wind turbine. Curr. Appl. Phys. 2010, 10, S339–S342. [Google Scholar] [CrossRef]
- Faltinsen, O. Sea Loads on Ships and Offshore Structures; Cambridge University Press: Cambridge, UK, 1993. [Google Scholar]
- Jiang, H.; Wang, B.X.; Bai, X.Y.; Zeng, C.; Zhang, H.D. Simplified expression of hydrodynamic pressure on deepwater cylindrical bridge piers during earthquakes. J. Bridge Eng. 2017, 22, 04017014. [Google Scholar] [CrossRef]
- Liaw, C.Y.; Chopra, A.K. Dynamics of towers surrounded by water. Earthq. Eng. Struct. D 1974, 3, 33–49. [Google Scholar] [CrossRef]
- DNV-RP-C205; Environmental Conditions and Environmental Loads. Det Norske Veritas: Oslo, Norway, 2010.
- Gerolymos, N.; Gazetas, G. Development of Winkler model for static and dynamic response of caisson foundations with soil and interface nonlinearities. Soil Dyn. Earthq. Eng. 2006, 26, 363–376. [Google Scholar] [CrossRef]
- Hardin, B.O.; Drnevich, V.P. Shear modulus and damping in soils: Design equations and curves. J. Soil Mech. Found. Div. 1972, 98, 667–692. [Google Scholar] [CrossRef]
- Tu, W.B.; Huang, M.S.; Gu, X.Q.; Chen, H.P.; Liu, Z.H. Experimental and analytical investigations on nonlinear dynamic response of caisson-pile foundations under horizontal excitation. Ocean. Eng. 2020, 208, 107431. [Google Scholar] [CrossRef]
- Allotey, N.; El Naggar, M.H. Generalized dynamic Winkler model for nonlinear soil–structure interaction analysis. Can. Geotech. J. 2008, 45, 560–573. [Google Scholar] [CrossRef]
- Huang, M.S.; Liu, Y. Axial capacity degradation of single piles in soft clay under cyclic loading. Soil. Found. 2015, 55, 315–328. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Zhong, R.; Liu, L. Resonance characteristics of onshore wind turbine tower structure considering the impedance of piled foundations. Arab. J. Geosci. 2020, 13, 163. [Google Scholar] [CrossRef]
- Shi, Y.; Yao, W.; Yu, G. Dynamic Analysis on Pile Group Supported Offshore Wind Turbine under Wind and Wave Load. J. Mar. Sci. Eng. 2022, 10, 1024. [Google Scholar] [CrossRef]
- Dobry, R.; Gazetas, G. Dynamic response of arbitrarily shaped foundations. J. Geotech. Eng. Div. 1986, 112, 109–135. [Google Scholar] [CrossRef]
- Newmark, N.M. A method of computation for structural dynamics. J. Eng. Mech. Div. 1959, 85, 67–94. [Google Scholar] [CrossRef]
- Tu, W.B.; Gu, X.Q.; Chen, H.P.; Fang, T.; Geng, D.X. Time domain nonlinear kinematic seismic response of composite caisson-piles foundation for bridge in deep water. Ocean. Eng. 2021, 235, 109398. [Google Scholar] [CrossRef]
- Hashash, Y.M.A.; Park, D. Viscous damping formulation and high frequency motion propagation in non-linear site response analysis. Soil Dyn. Earthq. Eng. 2002, 22, 611–624. [Google Scholar] [CrossRef]
- Huang, M.S.; Tu, W.B.; Gu, X.Q. Time domain nonlinear lateral response of dynamically loaded composite caisson-piles foundations in layered cohesive soils. Soil Dyn. Earthq. Eng. 2018, 106, 113–130. [Google Scholar] [CrossRef]
- Holmes, J.D. Wind Loading of Structures; CRC Press: Boca Raton, FL, USA, 2007. [Google Scholar]
- Kaimal, J.C.; Wyngaard, J.C.J.; Izumi, Y.; Coté, O.R. Spectral characteristics of surface-layer turbulence. Q. J. Roy. Meteor. Soc. 1972, 98, 563–589. [Google Scholar] [CrossRef]
- EN 61400-1:2005; Wind Turbines Part 1: Design Requirements. International Electrotechnical Commission: Geneva, Switzerland, 2005.
- Pierson, W.J., Jr.; Moskowitz, L. A proposed spectral form for fully developed wind seas based on the similarity theory of SA Kitaigorodskii. J. Geophys. Res. 1964, 69, 5181–5190. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Height (m) | Thickness (mm) | Height (m) | Thickness (mm) |
|---|---|---|---|
| 0~5.4 | 40 | 42.2~50.9 | 21 |
| 5.4~21.9 | 26 | 50.9~53.8 | 19 |
| 21.9~30.6 | 24 | 53.8~56.7 | 18 |
| 30.6~36.4 | 23 | 56.7~59.6 | 17 |
| 36.4~42.2 | 22 | 59.6~77.3 | 16 |
| Material Property | Elastic Modulus E MPa | Poisson’s Ratio ν | Density ρ kg/m3 | |
|---|---|---|---|---|
| Tower | Steel | 210,000 | 0.3 | 7698 |
| GBF | Concrete | 33,500 | 0.2 | 2500 |
| Infill sand | 66.5 | 0.325 | 1620 | |
| Foundation bed | Scour protection layer | / | / | 1800 |
| Backfill layer | 66.5 | 0.325 | 1620 | |
| Gravel layer | 140 | 0.3 | 1500 | |
| Filter layer | 140 | 0.3 | 2100 | |
| Ground | Sand layer | 66.5 | 0.325 | 1620 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tu, W.; He, Y.; Liu, L.; Liu, Z.; Zhang, X.; Ke, W. Time Domain Nonlinear Dynamic Response Analysis of Offshore Wind Turbines on Gravity Base Foundation under Wind and Wave Loads. J. Mar. Sci. Eng. 2022, 10, 1628. https://doi.org/10.3390/jmse10111628
Tu W, He Y, Liu L, Liu Z, Zhang X, Ke W. Time Domain Nonlinear Dynamic Response Analysis of Offshore Wind Turbines on Gravity Base Foundation under Wind and Wave Loads. Journal of Marine Science and Engineering. 2022; 10(11):1628. https://doi.org/10.3390/jmse10111628
Chicago/Turabian StyleTu, Wenbo, Yufan He, Linya Liu, Zonghui Liu, Xiaolei Zhang, and Wenhai Ke. 2022. "Time Domain Nonlinear Dynamic Response Analysis of Offshore Wind Turbines on Gravity Base Foundation under Wind and Wave Loads" Journal of Marine Science and Engineering 10, no. 11: 1628. https://doi.org/10.3390/jmse10111628