1. Introduction
To meet the increasing demand for superior quality protein, many coastal countries have paid special attention to trophic marine fish, such as the Salmo salar and rainbow trout. As reported by FAO [
1], global fish production reached about 179 million tons in 2018, of which 82 million tons, valued at USD 250 billion, came from aquaculture production. Thus, edible fish play an increasingly important role in human’s food intake. However, the pollution of the marine environment seriously threatens offshore aquaculture production in near shore areas [
2]. Hence, open ocean aquaculture has increasing attractiveness.
In recent decades, the development of open ocean aquaculture equipment has gained considerable advancement. In the 1970s, European countries took the lead in the design and construction of aquaculture cages [
3]. As a novel method of mariculture, open ocean aquaculture has been investigated in dozens of countries such as the United States and Norway [
4]. The early dominating concept is the open cage, which generally consists of floating collars, nets, bottom weights, and a mooring system [
5]. Many designs of open cages have been developed and commercialized, with the high-density polyethylene (HDPE) frame gravity floating cage being the most common, with a breeding capacity of up to 20,000 m
3 [
6]. The capacity of the copper alloy breeding cage can also reach up to about 10,000 m
3 [
7]. The diameter of the spherical cage can be larger than 25 m, which can withstand waves with a wave height of 5 m [
6]. A mature scheme is Ocean Farm 1 operated by SalMar, which is the world’s first offshore fish farm [
8]. With a diameter of 110 m and a height of 69 m, Ocean Farm 1 has the capability of breeding 1.5 million salmon at a time [
9]. Nevertheless, those multi-point mooring fish cages would generally withstand large loads due to their relatively large dimensions.
By contrast, the vessel-shaped ocean farm, namely the aquaculture ship, can avoid enormous wind, wave, and current loads with the help of the weathervaning effect by adopting a turret mooring system [
10]. The weathervaning effect can bring aquaculture ships many benefits. Besides reducing the environmental loads affecting the hull, the spin motion can help spread away fish waste in a timely manner, keeping the aquaculture water always fresh. Aquaculture company Nordlaks has proposed an innovative idea, namely the giant vessel-shaped ocean farm Havfarm 1. With a length of 430 m and width of 54 m, Havfarm 1 will be able to breed 10,000 tons of salmon or about 2 million fish [
11].
Besides the environmental loads, the power supply of ocean aquaculture is another challenge. Traditionally, the electricity generation of open ocean facilities is commonly supplied by gas turbines located on the platforms. However, the traditional power supply method may be too expensive to operate if the aquaculture equipment goes to deep sea and would emit significant amounts of CO
2 and NO
x [
12]. Since there are abundant wind and wave energy sources in offshore waters, they can be used to power the open ocean aquaculture equipment, providing an economical and environment-friendly method for open ocean mariculture. As for wind turbines applied to offshore industries, many studies of offshore wind power supply to oil and gas rigs have been conducted [
13]. The results show that by connecting five offshore petroleum installations to a 100 MW offshore wind farm, assuming the wind power always has priority to supply the load with two parallel gas turbines, the system can reduce fuel consumption by 21–32% in a full-year simulation. Moreover, the emission tax can be significantly reduced [
14]. As for integrating wave energy with aquaculture, a study shows that a wave energy park might have a positive impact on the wave conditions of a fish farm installed downwave because of its shielding effect [
15].
The EU MARIBE project has explored many potential combinations. The combination of aquaculture and wind or wave energy has been discussed. Grupo COBRA and BESMAR are planning to install five floating wind turbines near six fusion-type offshore aquaculture cages [
16]. According to the description, this method could save operating and managing costs by sharing the multi-purposes vessels. Moreover, the power generated by the wind farm can cover the consumption requirement of the aquaculture farm. Another project carried out by Albatern’s WaveNET and AquaBioTech Group aimed to take advantage of the array arrangement to reduce visual impact and potential conflict with other sea users while making use of the wave energy produced by a wave energy converter [
16]. Both projects are favorable methods to integrate clean energy equipment with aquaculture.
Inspired by those positive methods, an innovative idea came to the authors that integrates an offshore wind turbine with a turret mooring vessel-type fish farm. As a rule of thumb, the wave, current, and wind tend to maintain a smaller included angle. By virtue of the weathervaning effect of single-point mooring (SPM), the aquaculture ship can keep the direction of head sea, which can therefore help to reduce the environmental loads applied on the aquaculture ship. Consequently, the ship will have a better sea-keeping performance.
To demonstrate the feasibility of this concept, it is essential to perform numerical analysis. Because both the construction of the floating offshore wind turbine (FOWT) and the integrated aquaculture ship are of a wind turbine installed on a floating structure, the analysis method can borrow from the FOWT. Many numerical analyses have been carried out to determine the effect of the floating wind turbine’s motion on the turbine’s generating capacity. Johlas et al. [
16] simulated the time-averaged power generation of a NREL 5 MW wind turbine mounted on the OC3-UMaine spar and OC4-DeepCWind semisubmersible floating platforms with OpenFAST. The results showed that the pitch and surge motions are two main influencing factors for power gains. It is complicated to evaluate the dynamic characteristics because of the interaction between the wind turbine and its floating platform [
17]. To analyze the dynamic reaction of the FOWT, aerodynamics are essential because they are inherently tied to FOWT’S generating efficiency [
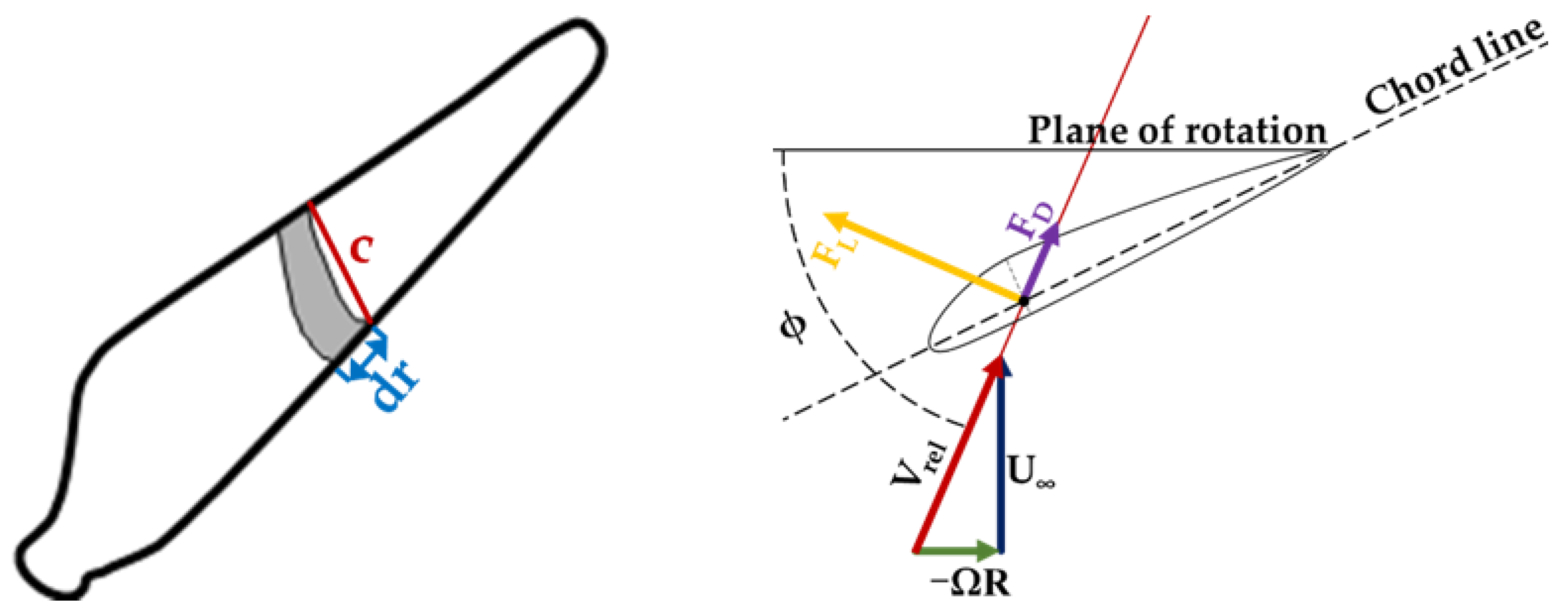
18]. Therefore, many numerical methods have been developed and utilized. Based on blade element momentum (BEM) theory and the generalized dynamic wake (GDW) model, Jonkman et al. [
19] developed a fully coupled aero-hydro-servo-elastic code FAST. More recently, Zhang et al. [
20] developed a novel framework for modeling floating offshore wind turbines based on the vector form intrinsic finite element (VFIFE) method. Moreover, Yang et al. [
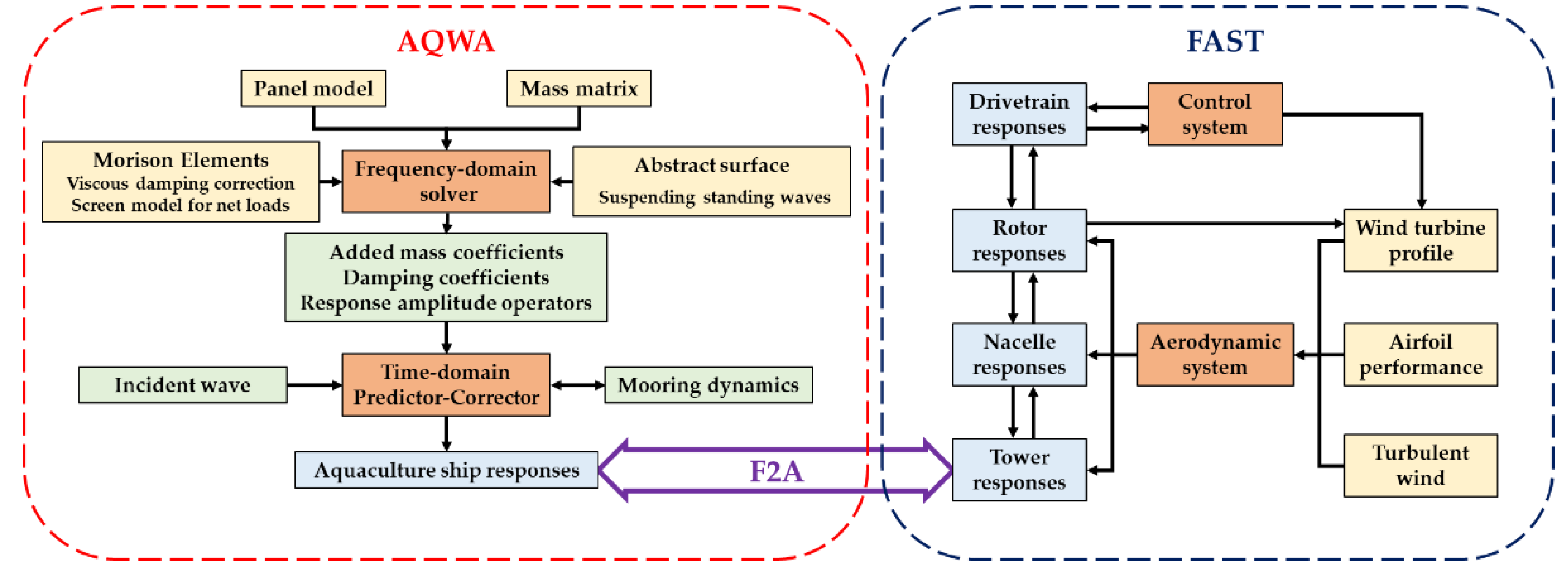
21] developed and implemented a coupling framework (F2A) on this basis, which can introduce aero-servo-elastic effects in FAST into the time domain analysis of AQWA. Chen et al. [
22] put forward a novel of an integrated floating wind-wave power generation platform and used OpenFAST to prove the accuracy of the combined use of AQWA and F2A, which was satisfactory. Tian et al. [
23] developed a novel dynamics analysis method based on the theorem of the moment of momentum and Newton’s second law, whose capability is well proven by comparing it with FAST. Zhai et al. [
24] modeled a simplified floating offshore wind turbine with an aquaculture cage (FOWT-AC). Furthermore, a simulation was conducted in AQWA to investigate the new structure. The results show that the FOWT-AC produces a basically lower standard deviation of the motion responses when compared with FOWT, which can prove the improvement in the stability of the idea of installing a wind turbine on some floating structures. Chu et al. [
25] presented a frequency domain approach for an integrated offshore fish cage and wind turbine named COSPAR in AQWA. In their study, the wind thrust was estimated based on the pre-defined thrust coefficients. Their results demonstrated that the COSPAR can provide a stable working platform for offshore fish farms from wind, wave, and current loads, and has acceptable pitch angles for a steady wind turbine operation.
Since the dimensions of the platform of FOWT are relatively smaller than the wind turbine tower, the FOWT numerical analysis concentrates more on the wind turbine’s aerodynamic and structural responses than the hydrodynamic responses. However, when compared with the vessel-shaped ocean farm, the wind turbine’s mass is comparatively light. The complicated hydrodynamic response, i.e., nonlinear hydrodynamics, mooring dynamics, and material nonlinearity, is dominating. Moreover, the net load is not negligible; thus, many studies have been conducted focusing on the net load. Yang et al. [
26] proposed a one-way fluid-structure coupling model to examine the flow interaction with the pile-net structures, revealing the influence mechanism of net on flow. Ma et al. [
27] conducted numerical studies with a coupled scheme that integrates the boundary element method (BEM) and the lumped-mass model to model the frames and the moorings/netting simultaneously. Jin et al. [
9] established a numerical model consisting of the frame structure, the nets, and the mooring system by using the potential flow theory, the Morison equation, and the nonlinear FE model. Li et al. [
28] performed a numerical analysis about an SPM vessel-type ocean farm. In this study, the hull was simplified to two main longitudinal beams; the bow structures and rigid nets were taken into consideration. The difference between the hydrodynamic response of rigid nets and flexible nets was explored. In order to further explore the calculation method of net load, Cheng et al. [
29] carried out detailed research on five Morison models and six screen models, and conducted sensitivity studies on different current velocities, inflow angles, and solidities of the nets.
In this study, a novel vessel-type fish farm modified from Havfarm 1 [
10] is modeled. A NREL 5 MW (National Renewable Energy Laboratory in America), wind turbine is installed on the stern of the facility to provide energy supply to cover the electrical cost of breeding and other work, as shown in
Figure 1. Given that anti-typhoon ability and quick release ability are necessary, an inner turret mooring system is selected. As for net load, the nets are simply modeled as rigid bodies by using Morison elements. The frequency domain analysis is carried out to evaluate the hydrodynamic performance in the well-proven hydrodynamics software AQWA 2020 R2, which is developed by Atkins Inc., England. Then, with the help of the open-source code F2A developed by Yang et al. [
21], the fully coupled time domain calculation is conducted in AQWA and the open source code FAST v7 developed by National Renewable Energy Laboratory (NREL) [
19] to evaluate the vessel’s motion and the wind turbine’s power generation capacity in nonlinear environment conditions.
3. Results and Discussion
3.1. Definition of Freedom
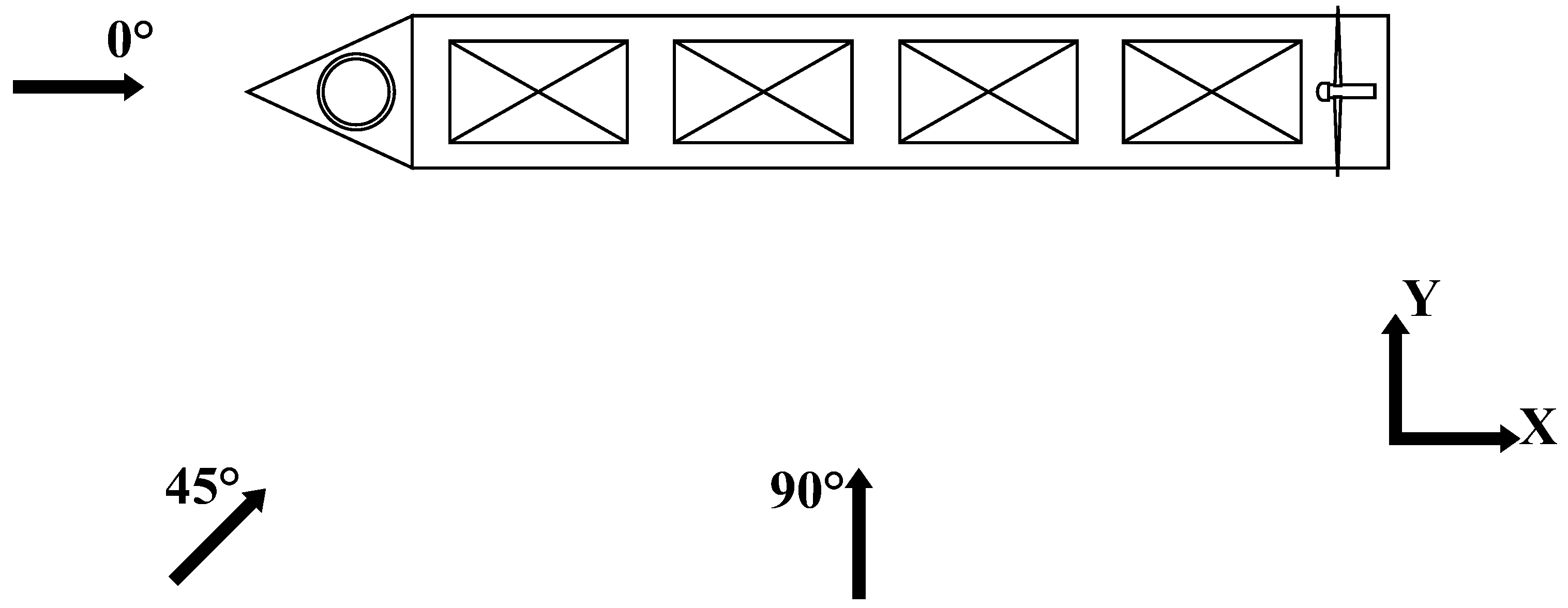
Before discussing the results, definitions of the freedom and direction of wind, current, and wave should be given, as shown in
Figure 9. The angle of wave and current is defined as the angle between the direction of wave (or current) and the positive X direction.
3.2. Frequency Domain Simulation Results
In this study, the frequency domain hydrodynamic analysis was carried out using AQWA. Considering the weathervaning effect, the inner angle between the heading angle and wave direction stays small, so head sea (0°), bow sea (45°), and beam sea (90°) are three typical wave directions focused on in this study.
Four different models were established to evaluate different factors’ effect on the aquaculture ship. Model 1 is a pure diffracting panel model without an external lid; Model 2 is also a diffracting panel model, but an abstract damping surface is created in opening water surface in the hull and moon pool to cut down the unreal wave elevation due to the suspending standing waves’ effect; Model 3 is based on Model 2, but additional viscous damping is added on the hull by means of Morison elements; and Model 4 is a model with added equivalent rigid nets on Model 3 to provide the effect of net loads.
A wave condition must be given to calculate the root mean square of relative velocity, which will replace the nonlinear term in the drag forces. In this study, an irregular wave is set, as
Table 5 shows.
The surge RAO of aquaculture is presented in
Figure 10. As
Figure 10 shows, the surge RAO is not greatly affected by the external lid and the nets, but the external lid does cut down the surge RAO at the frequency of around 0.55 rad/s.
As for the heave response, the heave RAO is shown in
Figure 11. The amplitude of heave in 90° is the greatest in those three wave directions. The peak amplitude of the panel model is about 2.5 m/m, while the peak amplitude of the hybrid model can be reduced to 2.0 m/m. It can be seen that in heave motion, the effect of viscous damping is more pronounced. As
Figure 11a shows, the peak amplitude of the heave RAO using the hybrid model is about 0.5 m/m less than using the panel model. As
Figure 11c shows, the hybrid model with nets will have a smaller heave RAO compared with the hybrid model without nets. The amplitude frequency of the model with nets is also lower than the model without nets.
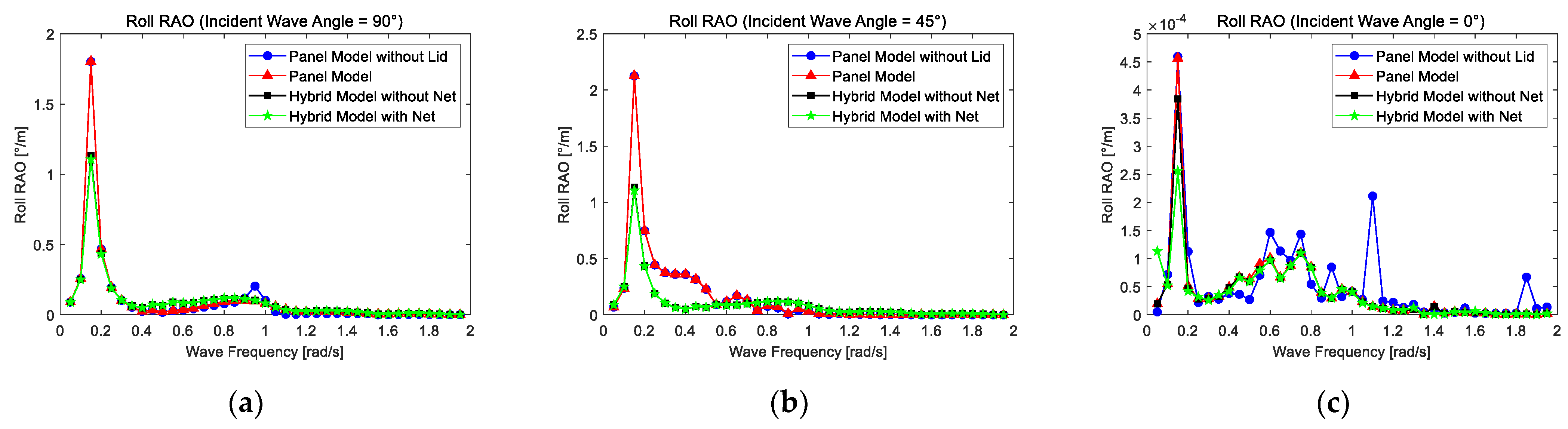
The roll RAO is shown in
Figure 12; similar to the heave RAO, the external lid will cut down the amplitude. It was noticed that the roll RAO at 45° is slightly larger than that at 90°, and the hollow structure is the main cause.
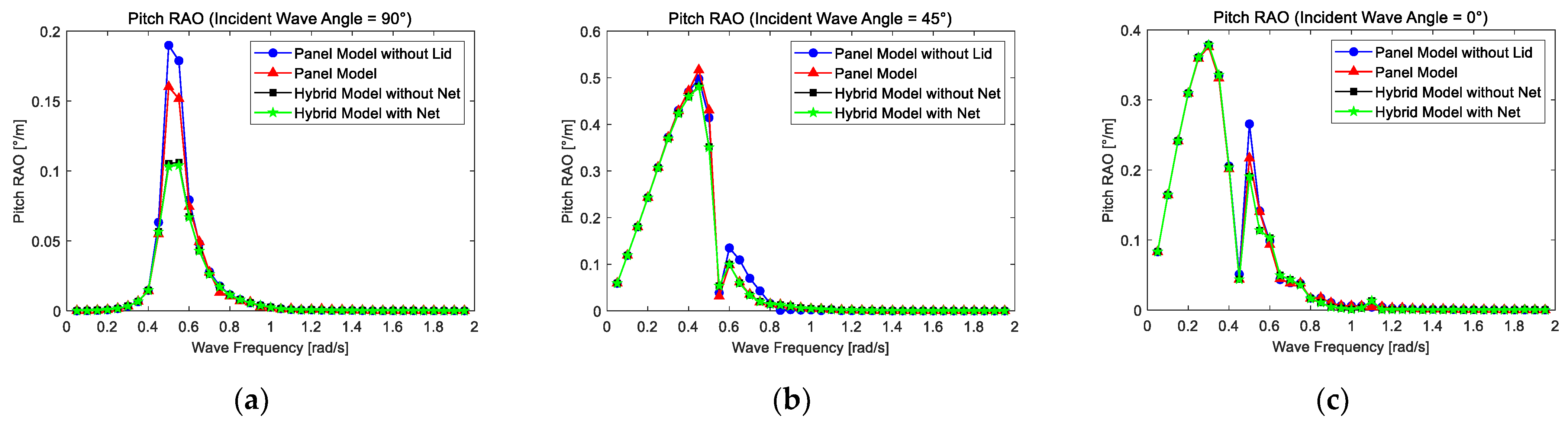
The pitch RAO is shown in
Figure 13. All three figures show that the aquaculture ship has low response in pitch motion. As
Figure 13b,c shows, the heave RAOs have two amplitudes. The four models have close amplitudes in the first frequency, but the second amplitudes show the differences between the four models, with the hybrid model with nets the smallest among them.
3.3. Time Domain Simulation Results
The time domain simulations were carried out based on the hybrid model with nets. Firstly, four different models in regular wave conditions are analyzed. Model 1 is an all-coupled model. All of the hydrodynamic, aerodynamic, servo system, and elastic characteristics are considered. This model aims to simulate the AQWA as realistically as possible. Model 2 is a six-freedom-fixed model, where the aerodynamic, servo system, and elastic characteristics are considered, but all six DOF motions of the aquaculture ship are suppressed; this model aims to simulate a fixed wind turbine. Model 3 is a model based on Model 1, but the strategy of the servo system (control and electrical system) is changed from blade pitch control to variable speed torque control. Model 4 is a model only carried out in AQWA; it is also based on the hybrid model with nets, but the wind turbine is represented by a force vertically downward, equal to the gravity of the turbine. The location of the mass point is also adjusted to maintain the ship in zero trim posture. This model aims to provide a contrast of an aquaculture ship without a working wind turbine. The detailed information of each model is listed in
Table 6.
The power generation comparison of Model 1, Model 2, and Model 3 is shown in
Figure 14. Model 2 (fixed wind turbine) will generate steady power, and the rated power output is about 5 MW (500 kW). However, when the wind turbine is installed on the aquaculture ship, the curve of power generation is still periodical, but less steady when compared with the fixed one. As for Model 3, the variable speed torque control strategy is applied, which results in the reduction in power generation, but is still periodical. However, the lowest power generation sometimes will cut down to 4.6 MW, 92% of the rated power output. For a more precise comparison of the power generation of different models, the average power generation over 400 s to 4000 s is calculated. The average power generation of Models 1, 2, and 3 is 4.99 MW, 5.00 MW, and 4.97 MW, respectively.
Power generation is the vital evaluation index of the energy supply ability of an aquaculture ship, but the motion and mooring force are the significant evaluation indexes of the stability of the aquaculture ship.
When it comes to the motion of the aquaculture ship in the study, Model 4, only simulated in AQWA by representing the gravity of the wind turbine with a steady downward force, is introduced into the comparison. The motion response, anchor lift, laid length, and cable force are calculated and discussed.
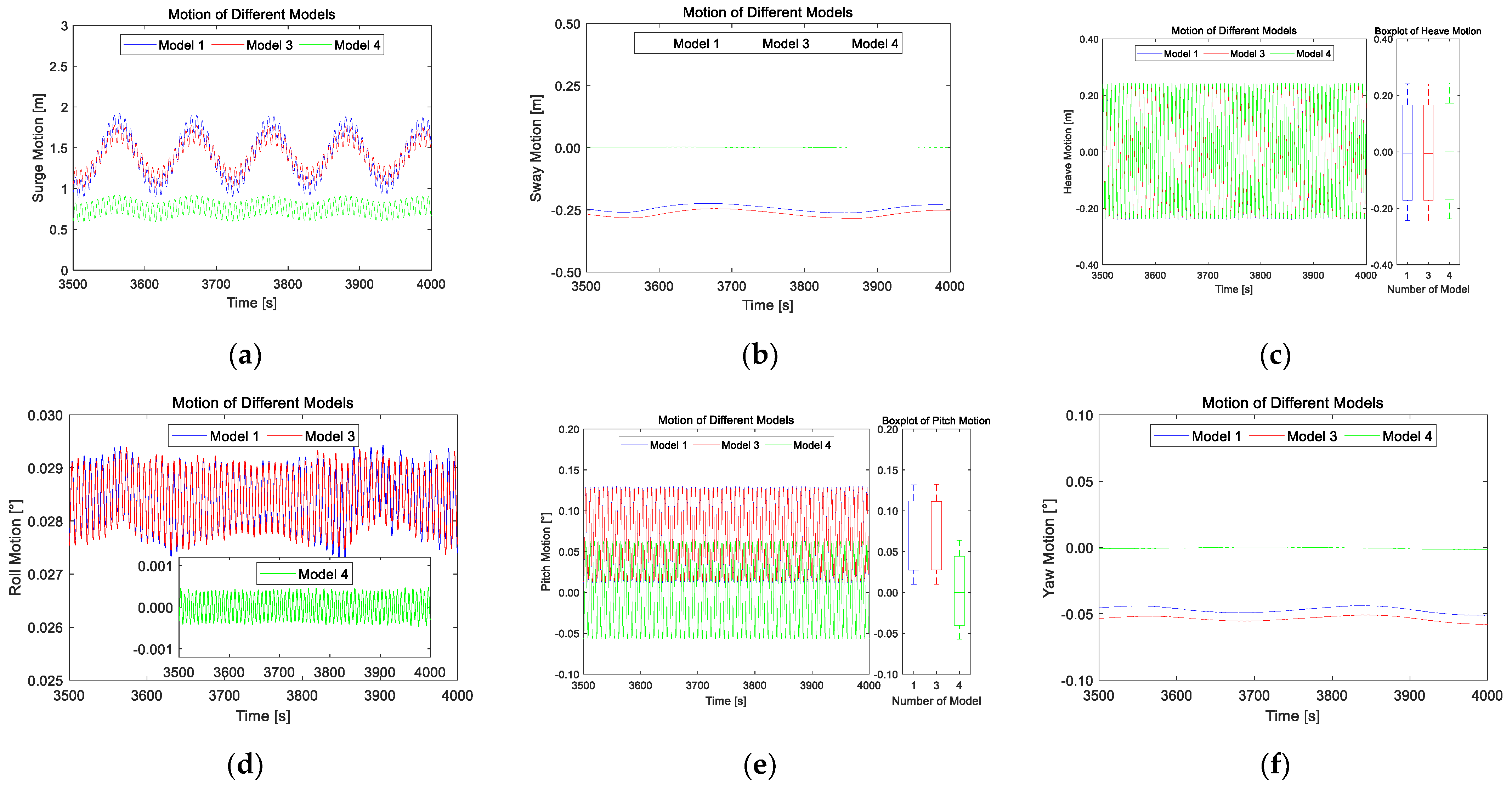
The time histories of motion in six DOF of three different models are presented in
Figure 15. It must be clarified that all motions presented here are motions relative to the original location in 0 s. It can be seen that the two different servo strategies not only have a slight effect on power generation, but also make the motion responses highly similar. In surge motion, the amplitude of Models 1 and 2 is about 2 m, and the radius of the swing circle is about 5 m, which can satisfy the allowance of 30 m according to the ABS rules [
36]. The existence of a 5 MW turbine leads to sway and yaw deviating from the initial position. The distances of motion interval of heave and pitch are not too affected by the wind turbine, but the pitch motions of Models 1 and 2 are slightly different from the equilibrium position. The roll motions of Models 1 and 2 are also slightly out of the equilibrium position. The differences in roll and pitch motion are caused by the force and moment of the wind turbine.
Besides motion, the cable force, laid length, and anchor lift are also important. The number of cables is set as in
Figure 2b. In all six cables, the cable laying in front of the ship will be pulled up, and cable 1 is the cable that bears the largest cable tension, so more attention should be paid to cable 1. The three mooring performances of cable 1 are shown in
Figure 16. The three mooring performances have apparent periodicity in regular wave, steady current, and steady wind. The wind turbine in working conditions does cause the aquaculture ship’s horizontal displacement, which results in the periodic increase in cable force and anchor lift, while laid length has a corresponding periodic decrease. The average cable force is 4130 kN for an aquaculture ship with a working wind turbine and 3770 kN with a standby wind turbine. The average laid length is 299.81 m for an aquaculture ship with a working wind turbine and 307.08 m with a standby wind turbine. The average anchor lift is 7.37 N for an aquaculture ship with a working wind turbine and 4.25 N with a standby wind turbine.
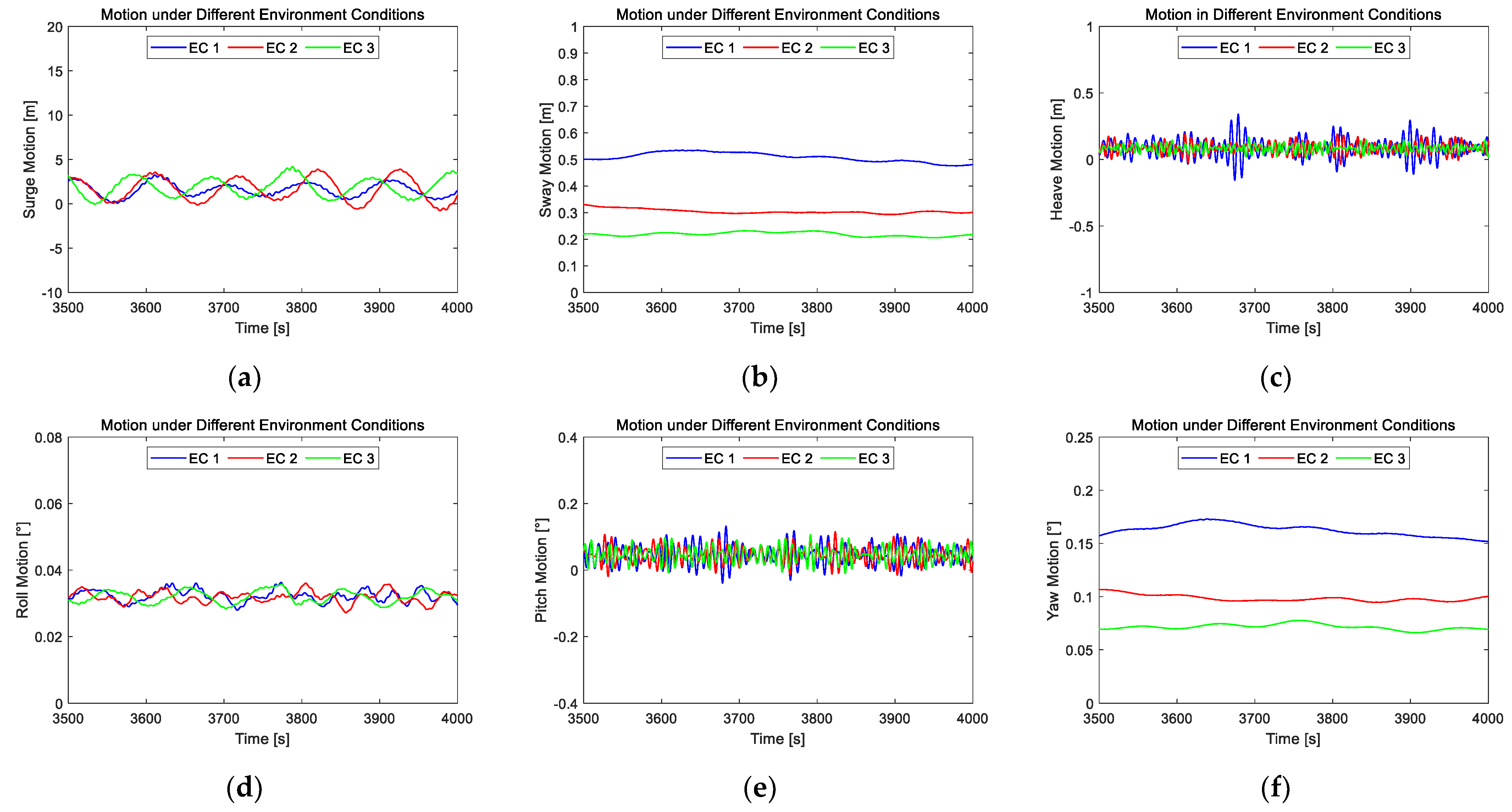
For further research, several simulations of the time domain analysis in irregular waves were carried out. Seven environment conditions were set to determine the influence of current speed, significant wave height, and spectral peak period. The details of the environment conditions are described in
Table 7.
These seven environment conditions are separated into three groups. Group 1 contains EC1, EC2, and EC3 to inquire about the impact of different current speeds. Group 2 contains EC4, EC1, and EC5 to inquire about the impact of different significant wave heights. Group 3 contains EC6, EC1, and EC7 to inquire about the impact of different spectral peak periods. The following are the motion results and mooring cable 1′s performances of each group. The statistical results of these motions and performances of cable 1 are also attached after the graphs, as
Table 8,
Table 9 and
Table 10 show.
Figure 17 shows the simulation results of Group 1. The surge motions of EC1, 2, and 3 are quite close. As for sway and yaw motion, the three lines almost stay horizontal smoothly. However, the balance positions are different. At 0 current speed, the hull will drift away, but a higher current speed brings large wave excitation force, which results in a reduction in the hull drift. Both the sway and yaw distance will be smaller. When it comes to heave and pitch motion, it is obvious that the higher current speed can lower the local peak amplitude.
From the results of Group 1, we can see that the high current speed has a trivial impact on the amplitude of surge, but the balance position will be farther away from the original position. Because the wind turbine’s lateral force will cause the aquaculture ship’s sway and yaw motion, the high current speed will force the sway motion to be smaller. Furthermore, the high current speed can enlarge the stability in heave and pitch. Moreover, cable 1′s mooring performances are apparently affected by high current speed. With the larger current velocity, the peak value of anchor lift is large, the average laid length is smaller, and the tension force is larger.
Figure 18 shows the simulation results of Group 2. The results of Group 2 show that significant wave height does influence the motion a lot. For a similar reason, the large significant wave height caused large wave excitation force, which leads to large local peak amplitude of surge, heave, and pitch motion, and makes the aquaculture ship nearer to the wave direction, which means a smaller sway drift distance and drift angle in yaw. Nevertheless, the wave height does not impact the roll motion too much.
From the simulation results of Group 2, we can draw the conclusion that the bigger wave height causes bigger wave excitation force, which leads to the significant response in surge, heave, and pitch motion. Moreover, the bigger excitation force will partly resist the wind turbine’s lateral force and make the aquaculture hull’s horizonal drift smaller. As for mooring performances, the anchor lift is greatly impacted by wave height. The amplitude of anchor lift in EC5 can reach 2000 N. Correspondingly, the minimal value of laid length reduces greatly, and the amplitude of cable force increases greatly.
The simulation results of Group 3 are as
Figure 19 shows. The periods of surge, heave, and pitch are consistent with the period of wave. The roll motion in the long wave period will show some high-frequency responses. As for sway and yaw motion, the shorter wave period can provide larger wave excitation force and help the aquaculture ship stay in the direction of the facing wave. In addition, the long wave period will cause large volatility in laid length and cable force. The amplitude of anchor lift will also be bigger in the long wave period.
4. Concluding Remarks
This study proposes a novel concept of an open ocean aquaculture ship integrated with a 5 MW wind turbine. This concept can realize the self-supply of energy powered by the wind turbine. In addition to the novel design, this study also presents a new method to simulate the turret mooring system by modeling the hull and turret using the joint connection in AQWA, which can limit the relative axial motion between the hull and turret. Moreover, the loads’ impacts on the nets are also considered by modeling them as Morison elements, so that the current forces applied on the nets can be evaluated by using the screen model.
The simulation process was separated into two parts. Firstly, the RAO with net load and external lid correction was computed based on the frequency domain hydrodynamic analysis. The comparison between the panel model and the hybrid model was conducted to demonstrate the effect of eliminating the unrealistic wave elevation and the effect of load on nets in different wave frequencies. The results show that the external lid will effectively reduce the unrealistic RAO amplitude near the resonant frequencies, while the nets modeled with Morison elements will even deviate the frequency of peak occurrence. Based on the RAO of the hybrid model with nets, simulations in the time domain were carried out. In the time domain simulations, the internal turret mooring system and wind turbine were taken into consideration. The aerodynamic loading of wind turbine was calculated with the help of an open-source code F2A to realize the coupling between AQWA and FAST V7. Two series of time domain calculations were carried out. One compared the power generation of fixed model and floating models with two different servo strategies. The results showed that the average power generation of these three models is quite close, proving the power generation of the novel design of an aquaculture ship integrated with a wind turbine. The other one simulated the aquaculture ship in different environment conditions to evaluate the dynamic performance of the integrated aquaculture ship. Seven environment conditions were separated into three groups to compare the ship’s motion and mooring performances under different current speeds, wave heights, and wave periods. From the results, we may conclude that the proposed concept can maintain a relatively stable floating state under the impacts of aerodynamic loads, current loads, and wave excitation forces. Furthermore, the introduction of a wind turbine onto the aquaculture ship would cause the drift motion of the ship because of its lateral force. Additionally, a high current speed, a higher wave height, and a shorter wave period are found to be helpful for the aquaculture ship to maintain the direction of facing the wind when the wind, wave, and current are assumed to come from the same direction.
From what has been discussed above, the proposed concept may be a reasonable method for the combined utilization of marine aquaculture and renewable energy. However, this study remains in a preliminary stage. Laboratory tests are recommended to be conducted to further verify this concept. Additionally, it is of great significance to investigate the optimal site selection for the combined utilization of offshore wind and marine aquaculture, which is recommended for future studies to promote the engineering application of the proposed concept.






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}