The software OpenFast [
44] developed by NREL was used to simulate the nonlinear floating wind turbine and the environmental disturbances; the hybrid intelligent controller was implemented with Matlab/Simulink software. The simulations were carried out with the IEC 61400-1 standard for load [
45]. The proposed control approach is compared with the base controller BC embedded in FAST. Both controllers are evaluated regarding wind power extracted and vibrations, measured in terms of output power, vibration suppression rate
(9), and root mean square error (
RMSE) (10).
where
is the standard deviation of the WT oscillations,
represents the reference signal,
is the output signal of FAST, and
n is the number of samples. The metrics are obtained in both cases regarding the FAST controller,
, which is taken as a reference. The normalized RMSE (
) is calculated for the power output obtained in the turbine. The first 60 s are removed to eliminate the effect of transient response in the analysis [
46].
5.1. Performance without Waves
First, the two controllers, the FAST baseline controller (BC) and the proposed one, fuzzy PI tuned by GA (AGFPI), are compared with a wind speed of 15 m/s and without waves. The simulation runs for 600 s to ensure that the results can be analyzed without transient effects.
Figure 4,
Figure 5,
Figure 6,
Figure 7 and
Figure 8 show how the fuzzy controller (AGFPI, blue line) gives a faster response and lower amplitude oscillations compared to the controller included in FAST (BC, red line). This means that a smaller control effort is required and, thus, there is less degradation of the mechanical components.
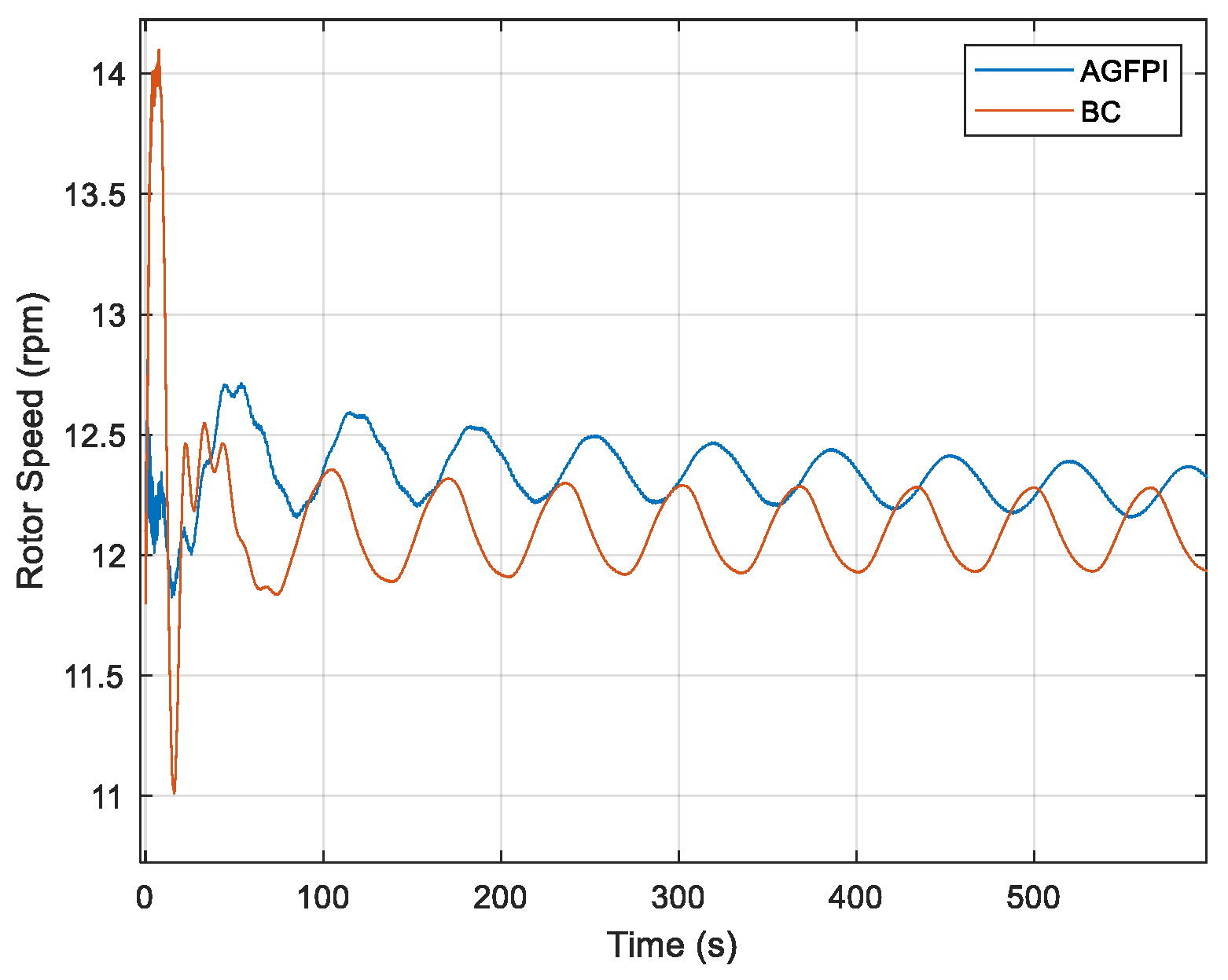
The rotor speed obtained with each controller is shown in
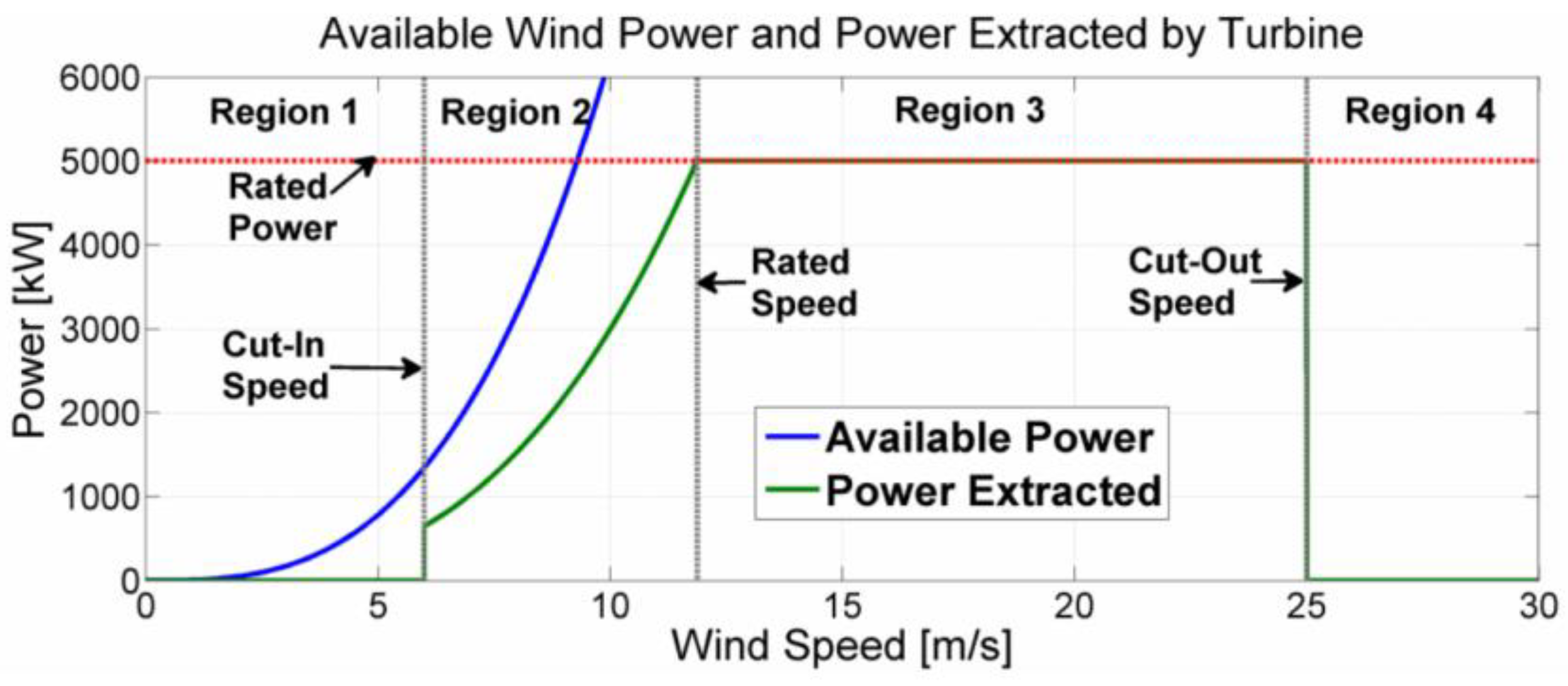
Figure 5. It can be seen how both controllers are able to make the turbine work in the operating region 3, where they maintain the angular rotor speed around its nominal value, 12.1 rpm. However, the fuzzy controller (blue line) gives smaller oscillations.
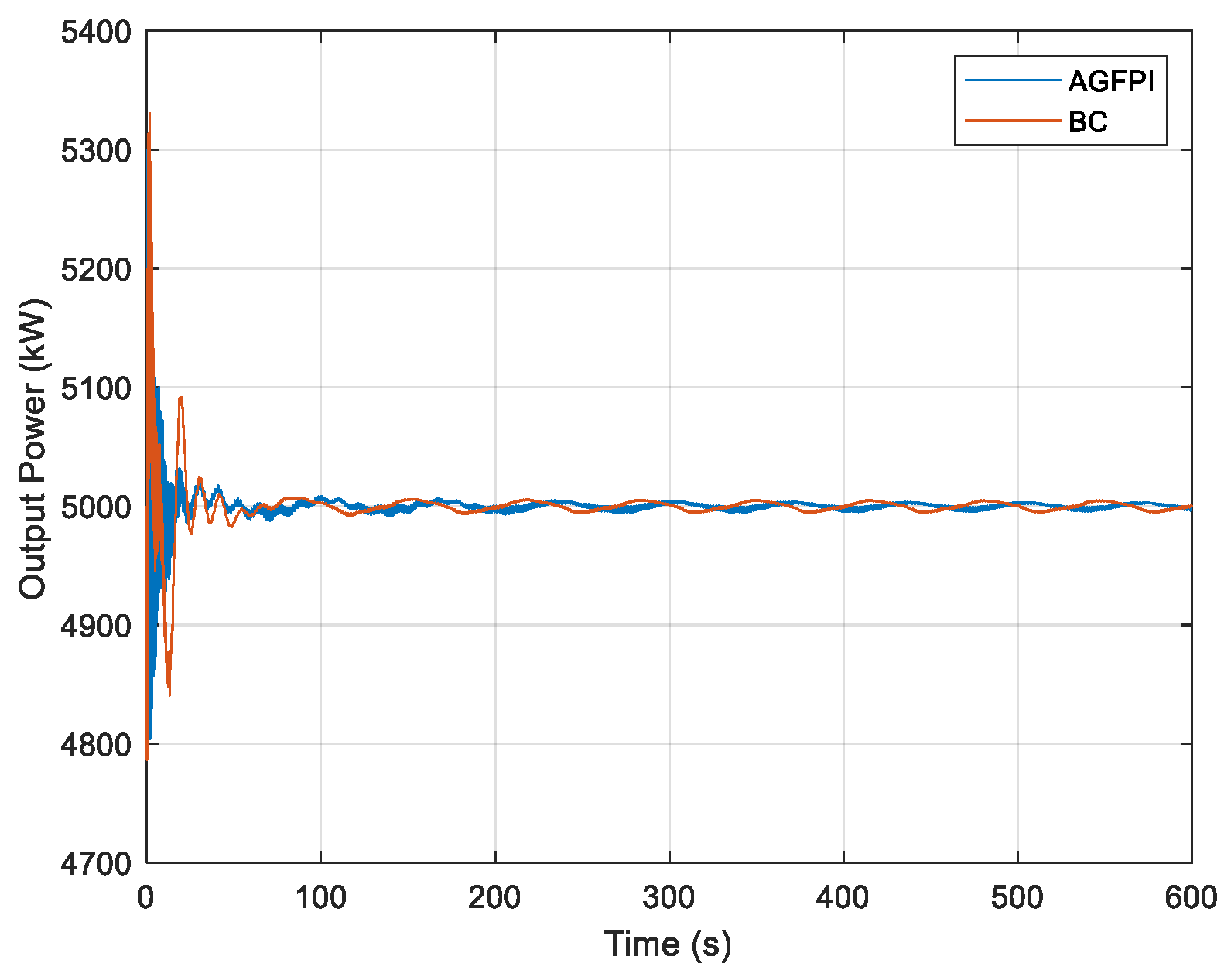
The rated power of this floating wind turbine is 5 MW, therefore this is the target power. In
Figure 6, it can be seen how both controllers are able to keep the power at the reference value. Again, the intelligent hybrid control system obtains an output power with smaller oscillations around the nominal value than the BC.
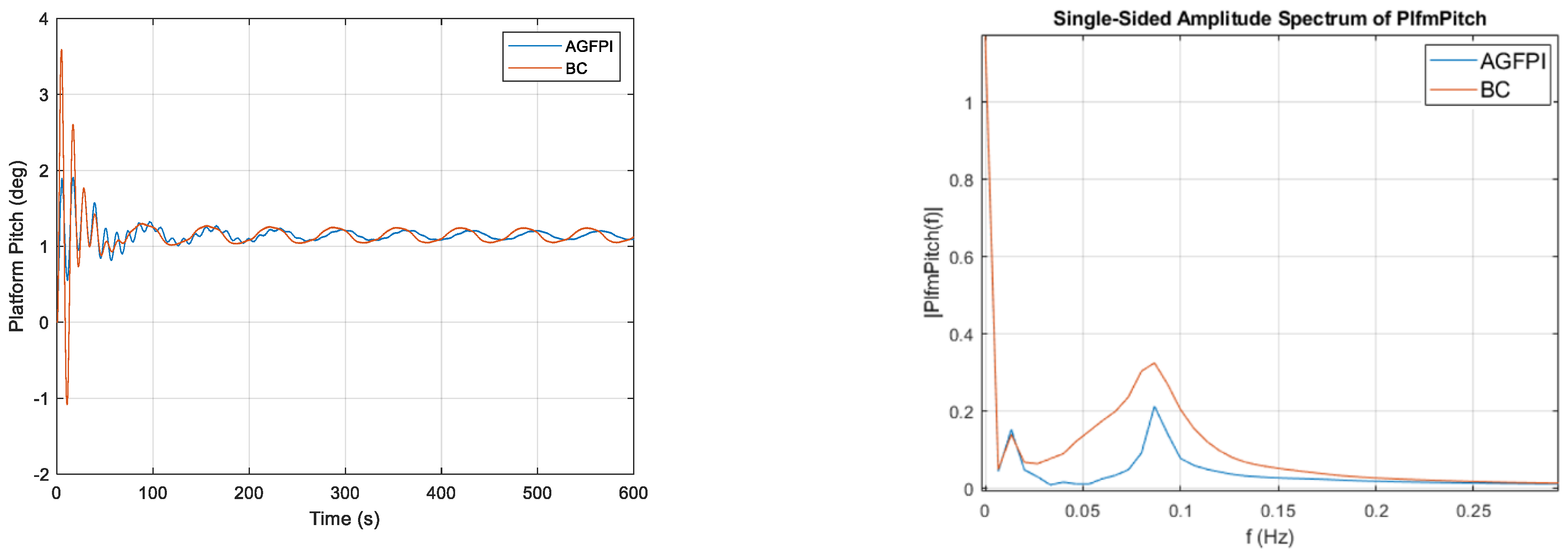
As mentioned before, the blade angle control also influences the stability of the FOWT. Two variables are used to analyze these effects: the pitch of the platform,
(PtfmPitch), and the displacement of the tower top in the fore–aft direction (TTDspFA). The platform pitch indicates the angle (°) of inclination of the platform with respect to the horizontal axis, while the tower top displacement shows the linear downwind displacement (m) of the nacelle with respect to its equilibrium position. According to the FAST manual [
47], the platform pitch is the degree of freedom that allows the platform to tilt around its reference point relative to the inertia frame. Thus, the pitch is calculated as a displacement that indicates the tilt rotation of the platform regarding its reference point. On the other hand, the TTDspFA is the tower top/yaw bearing fore–aft (translational) deflection (relative to the undeflected position). These measurements are shown in
Figure 7 and
Figure 8, respectively, with both control strategies. In the figures on the left, the variables are represented in the time domain; on the right side of the figures their amplitude spectrum is shown.
As shown in
Figure 7, the BC controller generates larger oscillations for a longer time. In this sense, the fuzzy controller gives a slightly better response, particularly in the first 50 s. The amplitude spectrum (
Figure 7, right) helps to corroborate the reduction in the amplitude of the oscillations with the intelligent hybrid controller. It is remarkable how the second mode is attenuated.
In
Figure 8 (left), it is possible to observe that the displacement of the tower is initially much smaller with the proposed AG-fuzzy hybrid control. From the first 50 s on, both controllers provide a similar response though the fuzzy one is still a little better.
Figure 7 and
Figure 8 (right) show how the amplitude of the spectrum is reduced with the hybrid intelligent controller in comparison to the FAST controller. Indeed, the biggest reduction appears in the range of frequencies from 0.025 to 0.15 Hz. This confirms that for this simulation case, although the oscillation frequencies of the wind turbine are approximately the same, the amplitude is reduced for both the platform and the tower with the proposed controller.
In addition, the tower displacement spectrum (
Figure 8, right) shows a small peak at high frequencies (around 0.58 Hz), which is not attenuated by any controller. This could indicate that the vibrations at that frequency come from the natural operation of the tower under these conditions. The fact that this peak does not appear in the platform may be due to the great mass and therefore the very high inertia of the barge.
5.2. Performance with Waves
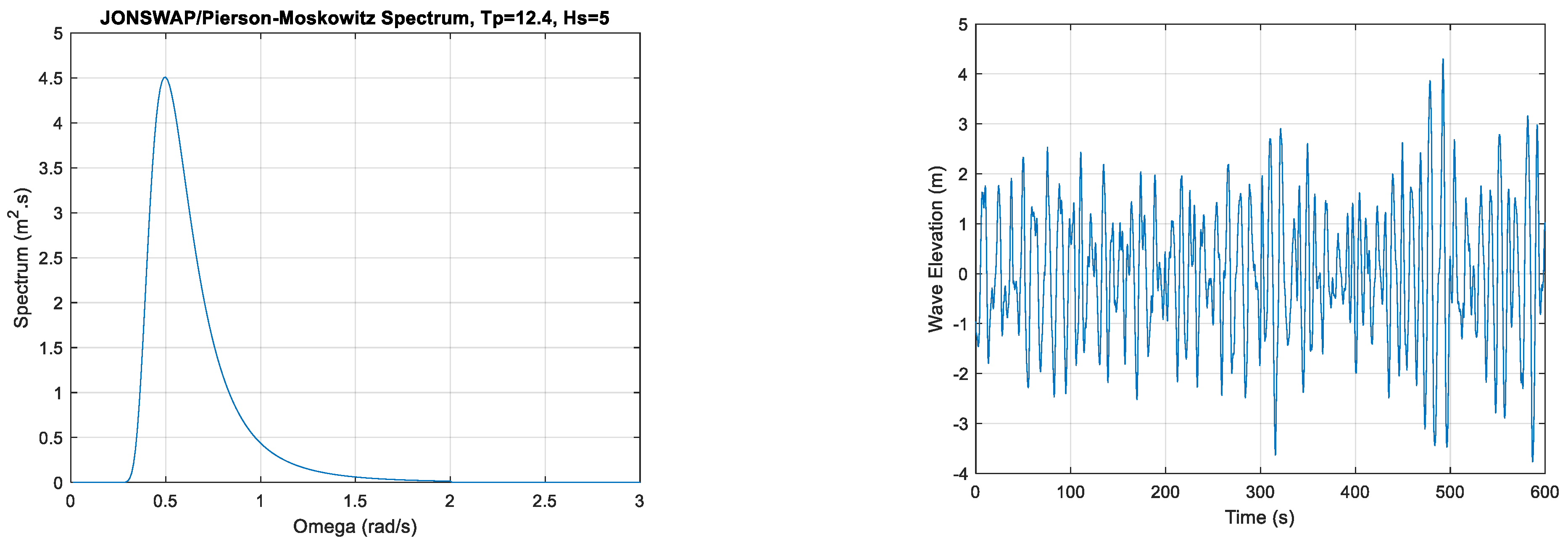
When working with offshore structures, it is very important to consider the effect that waves will have on them. In the following simulations, waves generated with the JONSWAP/Pierson–Moskowitz spectrum have been included. This spectrum is based on long measurements made in the North Atlantic Ocean [
48] and is determined by Equation (11),
where
is the significant wave height in m, defined as four times the standard deviation of the sea elevation;
is the peak angular frequency; and
is the wave angular frequency, both in rad/s. The spectral density of the waves for
= 5 and
= 0.5067 is shown in
Figure 9, left, and the corresponding wave elevation is depicted in
Figure 9, right.
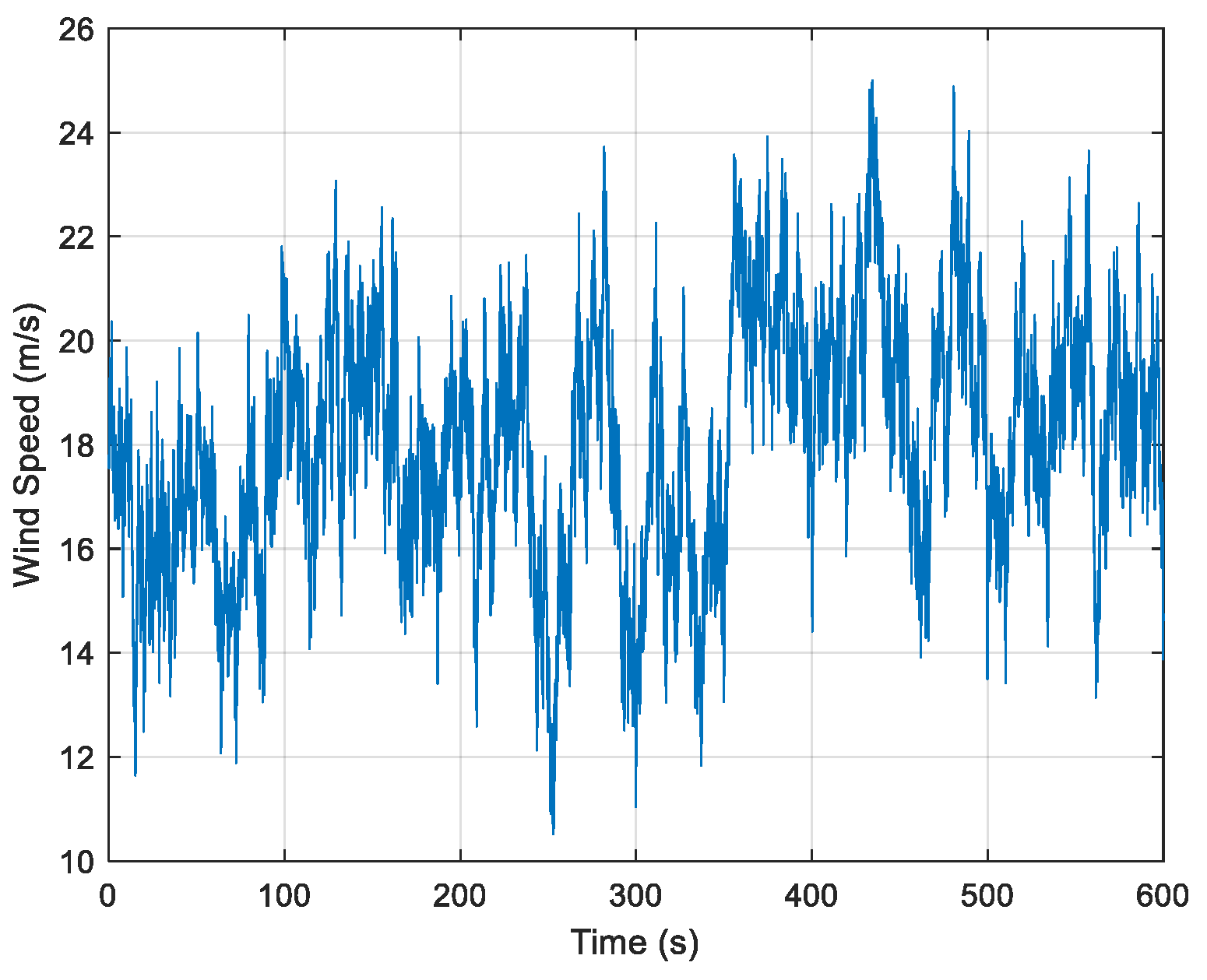
In addition, we have simulated stochastic turbulent winds generated by the NREL TurbSim tool with average ranges from 13 m/s to 23 m/s, within region 3 of the floating 5 MW NREL wind turbine operation. The turbulence model uses the IEC standard with mean turbulence of 14 %.
Figure 10 shows an example of wind profile with 17 m/s speed.
Different test cases have been carried out for different wave heights
, from 1 to 5 m; it is worth remarking that higher wind speeds are associated with higher wave heights. In all cases, the peak frequency of the wave spectrum is set to
= 0.5067 and it is maintained constant [
49]. The software FAST is used to generate irregular waves following the described JONSWAP/Pierson–Moskowitz spectrum. The inclusion of waves in the simulation makes the control task more difficult because they are important disturbances for the system.
Table 2 lists the test cases.
The controller has been tuned for each test case and then evaluated with all the rest of the test cases, that is, with different environmental conditions. This allows us to study how generalizable are the results of the optimization, the robustness of the controllers, and the influence of the wind and wave conditions.
Table 3 shows the value of the cost function (8) obtained during the evaluation. The column indicates the test case used to evaluate the performance of the controller and the row means the test case used to optimize the controller. As expected, the best results appear in the main diagonal of the table (these values have been boldfaced). In general, the cost function increases as we move away from the optimization conditions. The only exceptions appear in cells 3/5 and 4/1.
The best results are very similar each other; the difference between the maximum and the minimum is only around 5%. This fact indicates that the optimization process was able to tune the controller correctly regardless the weather conditions.
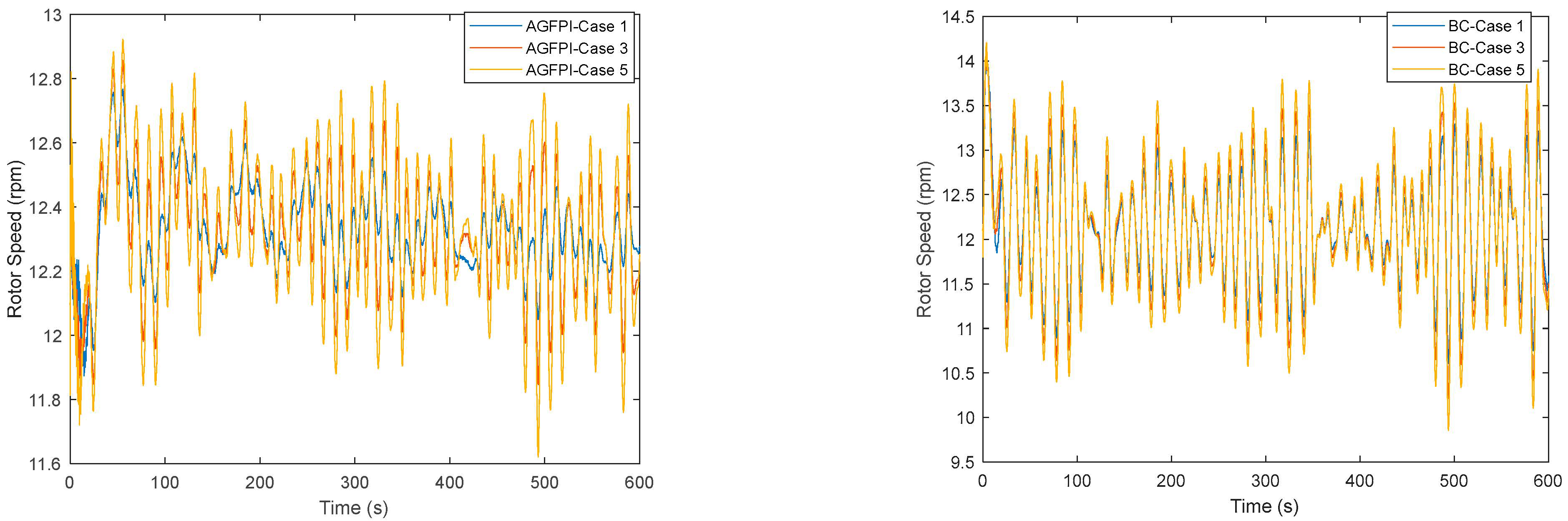
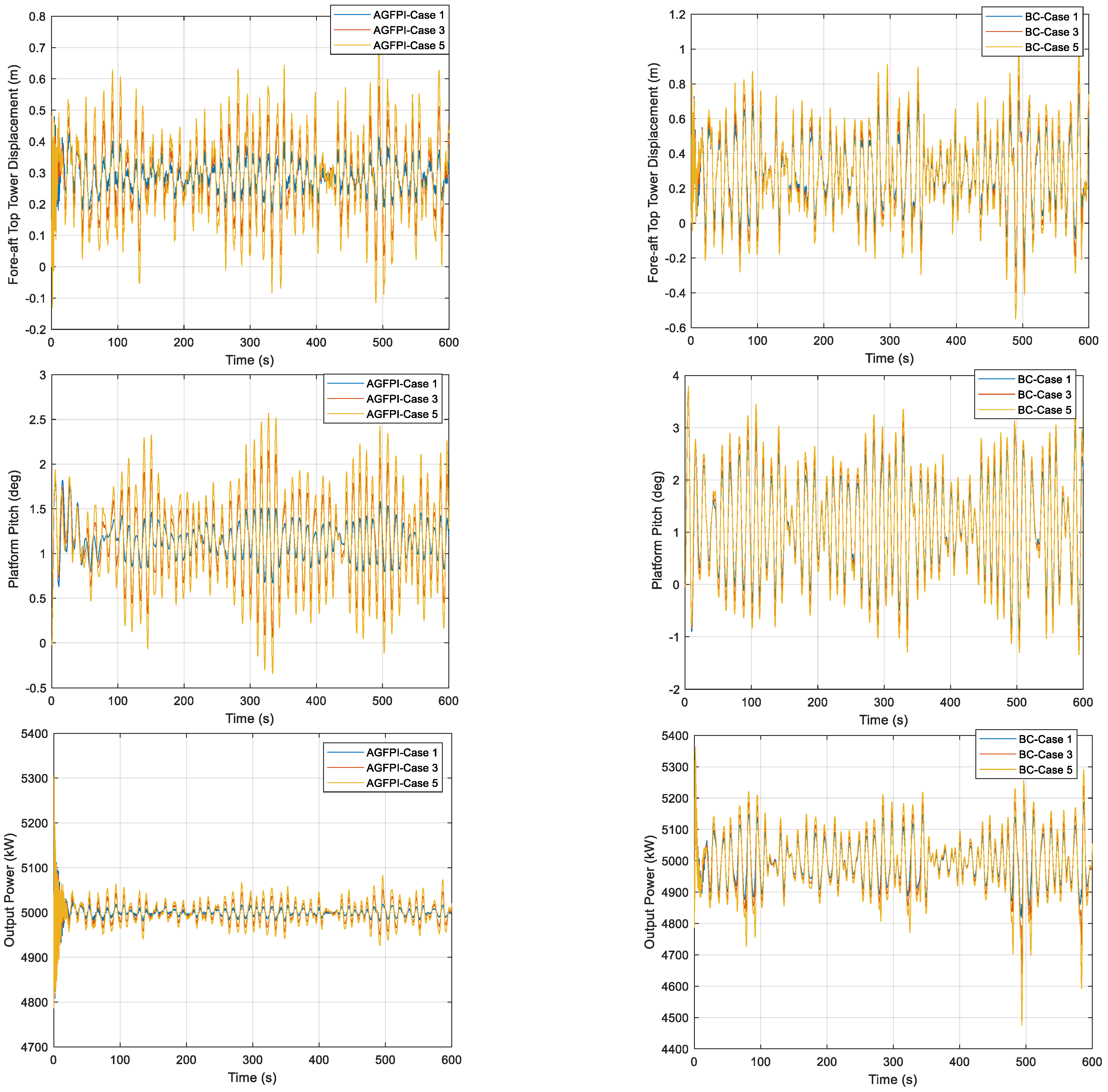
Figure 11 shows the results of the rotor angular speed in rpm (first row), the tower top displacement TTDspFA in m (2nd row), the platform pitch in degrees (3rd row), and the output power in kW (4th row) for the intelligent hybrid controller (AGFPI), in the left column, and for the FAST BC (in the right column) for test cases 1 (blue), 3 (red), and 5 (orange).
In
Figure 11, it can be seen how the proposed fuzzy logic controller provides a response with a smaller angular velocity error and lower oscillations, which means smaller loads for the turbine. When the AGFPI is applied, the rotor speed oscillates around the expected rate speed, that is, 12.1 rpm. However, with the BC the rotor speed average value varies much more and tends to be higher, slightly over 13 rpm. Moreover, the variation of the amplitude of these oscillations is larger. Regarding the second and third row, the tower top displacement and the platform pitch, respectively, the oscillations are also bigger when the BC is used, as corresponds to the rotor speed behavior. However, the frequency of the oscillations is similar in both cases. Another interesting result is that with the AGFPI, the vibrations are reduced but the power is not compromised. It is possible to observe how output power fluctuates correctly around the nominal power (fourth row). For the three cases analyzed, results are similar but, as expected, the amplitude of the oscillations increases with the wind speed and wave height. The control task becomes more complicated for both controllers, the hybrid one and the baseline controller.
Table 4 summarizes the suppression rate of the TTDspFA and the platform pitch, as well as the normalized RMSE of the power, obtained with the intelligent controller for all the test cases. It can be observed how the hybrid fuzzy controller obtains a relevant improvement by decreasing the platform and tower vibrations. These results represent a good range of improvement with respect to the BC embedded in FAST.
When the wind speed and wave height increase, the effects of the control action on the turbine in terms of structural stability are smaller compared to the disturbances of the wind and waves themselves. Therefore, the reduction of vibrations and, consequently, the loads on the turbine are less significant at higher wind speed and wave height. This explains why test case number 1 is the one with better performance in general (boldfaced).
Another interesting aspect to analyze in wind turbine control approaches is the fatigue [
50]. A key parameter to measure the fatigue of any component of the structure is the damage equivalent load (DEL). In this work, the fatigue DEL of the FOWT blades with both controllers, the proposed AGFPI and the BC, is obtained with the objective of determining which controller presents better performance in terms of reducing the loads that affect the wind turbine. The classical rainflow counting technique [
51] is used to estimate the DELs. This algorithm identifies the closed cycles in the stress–strain curve to estimate the loads on the turbine blades. The first 60 s have been removed to eliminate the effect of the transient response in the analysis. Results are shown in
Table 5 (regarding the in-plane bending moment) and in
Table 6 (with respect to the out-of-plane bending moment) of the blades.
Table 5 and
Table 6 show how the loads exerted on the blades both in-plane and out-of-plane are lower when the intelligent hybrid logic controller is used. This fact is consistent with the results obtained in
Table 4. As expected, when the wind or waves grow the fatigue increases.
In
Table 5, it is possible to observe how for all the wind and wave scenarios considered, the damage equivalent load (DEL) is much lower when the proposed AGFPI controller is applied. The best improvement is obtained for case 3, where a 12.02% reduction is observed. The worst case occurs with case 4, where a 3.83% reduction is obtained. Still, in all the cases, a reduction of the fatigue is achieved with the proposed controller.
Table 6 yields similar conclusions for all the cases tested. The DEL due to blade out-of-plane bending moment is much lower when the AGFPI control scheme is applied. The best improvement is obtained for case 1, where a 4.3% reduction is observed. The worst is case 5, with a 2.71% reduction.
In summary, as shown in the tables above, a relevant improvement in the fatigue DEL of the wind turbine is obtained with the proposed controller, which implies longer duration, less structural damage, and lower maintenance cost.
In general, the best results are obtained for the cases where the average wind speed is closer to the nominal wind speed of this type of turbine. This may be due to the fact that as the wind speed increases, the control task becomes more difficult and the external forces on the turbine also increase, further perturbing the system.
The results of this work will allow the implementation of FOWT controllers that, being an only system, are able to stabilize the power output while reducing the vibrations. The vibrations produce mechanical fatigue and deteriorate the turbine. Thus, the vibration damping provided by the proposed controller contributes to reducing the risk of damage, extending the useful life of the FOWT, and increasing the time between maintenance operations, which reduces the maintenance cost. Furthermore, it reduces the necessity of adding structural control devices to stabilize the WT.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}