

Study on the Design and Experimental Research on a Bionic Crab Robot with Amphibious Multi-Modal Movement
 , and
, and
Abstract
:1. Introduction
2. Biological Observation
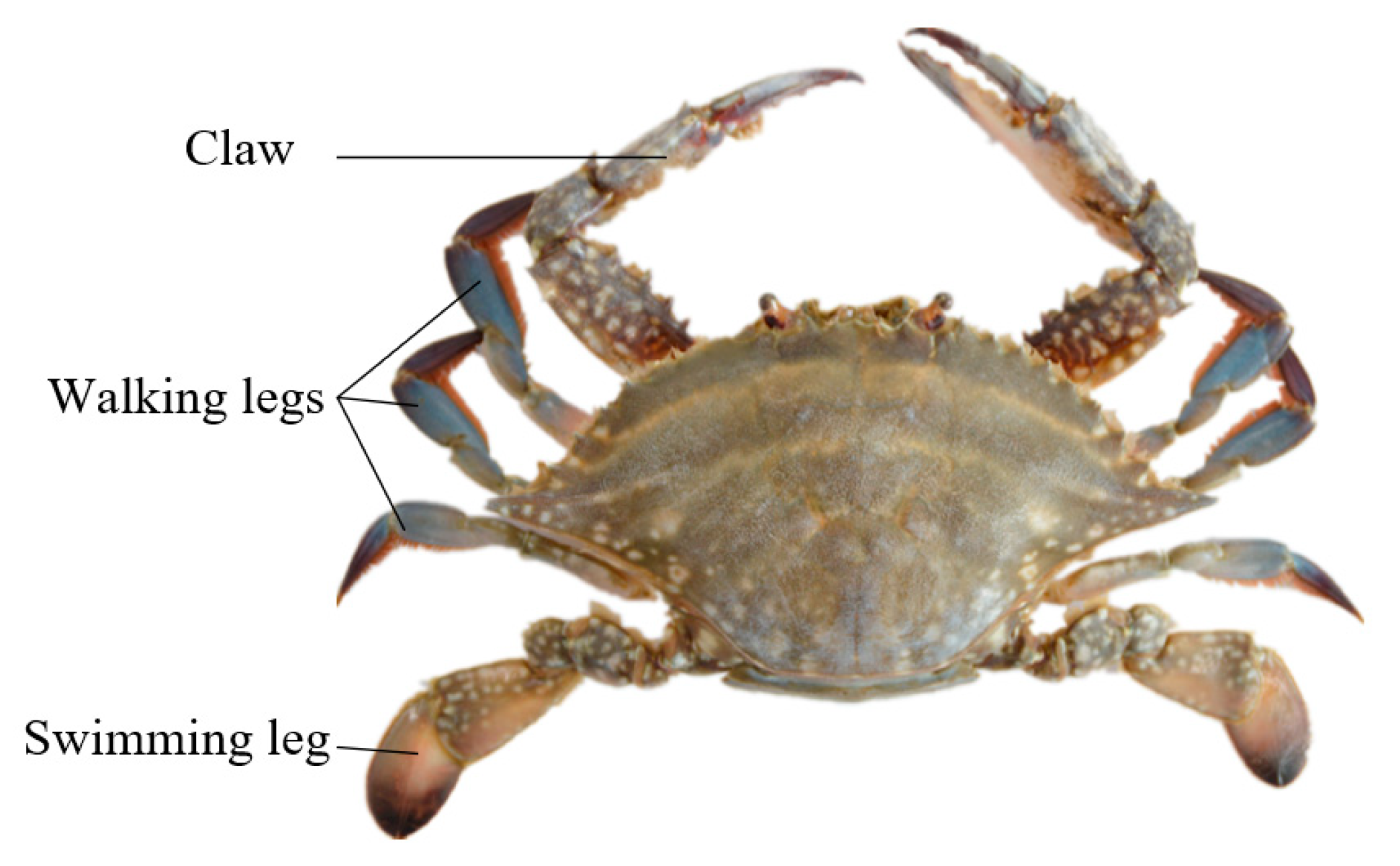
2.1. Crab (Portunus trituberculatus)
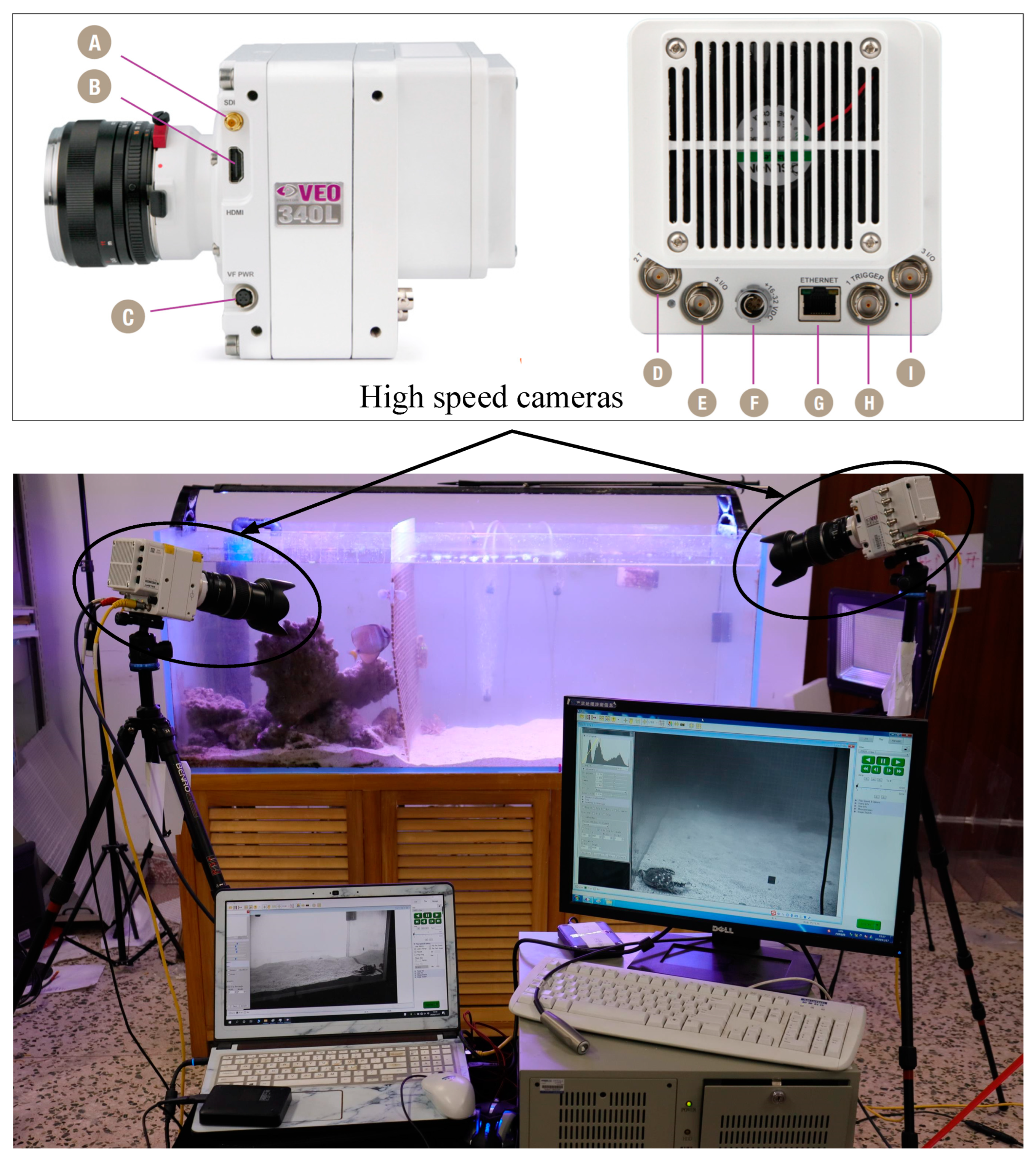
2.2. Observation Platform
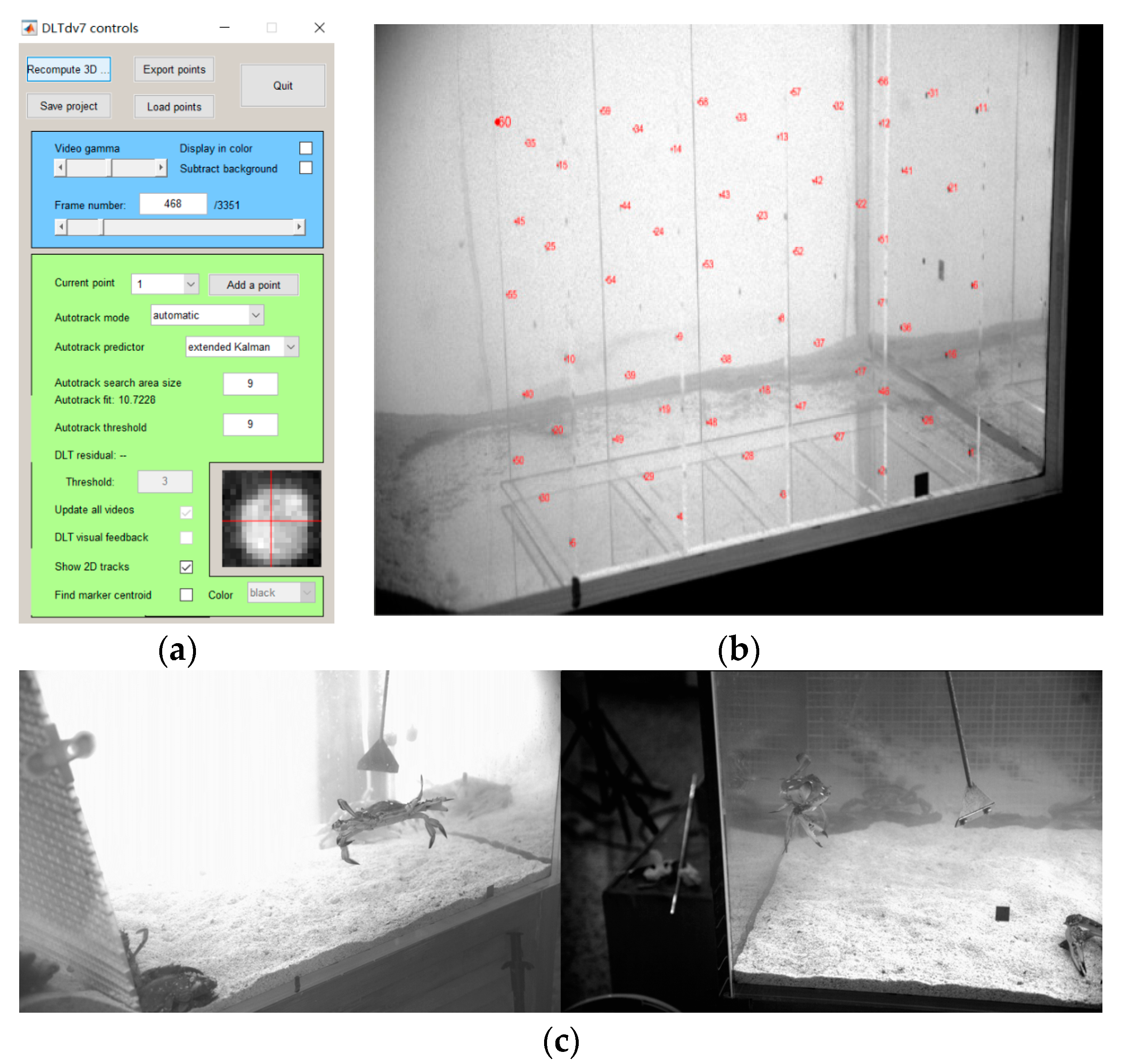
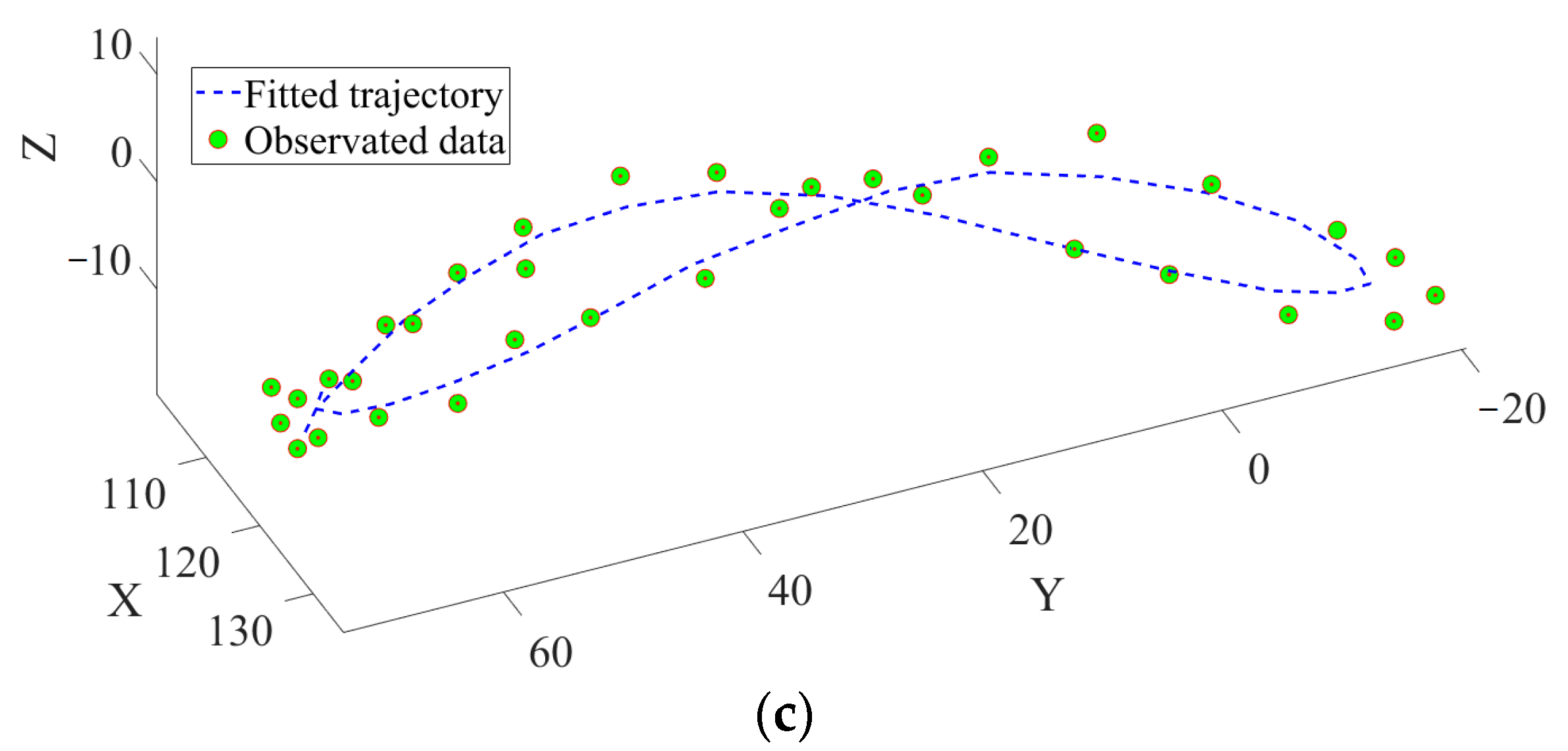
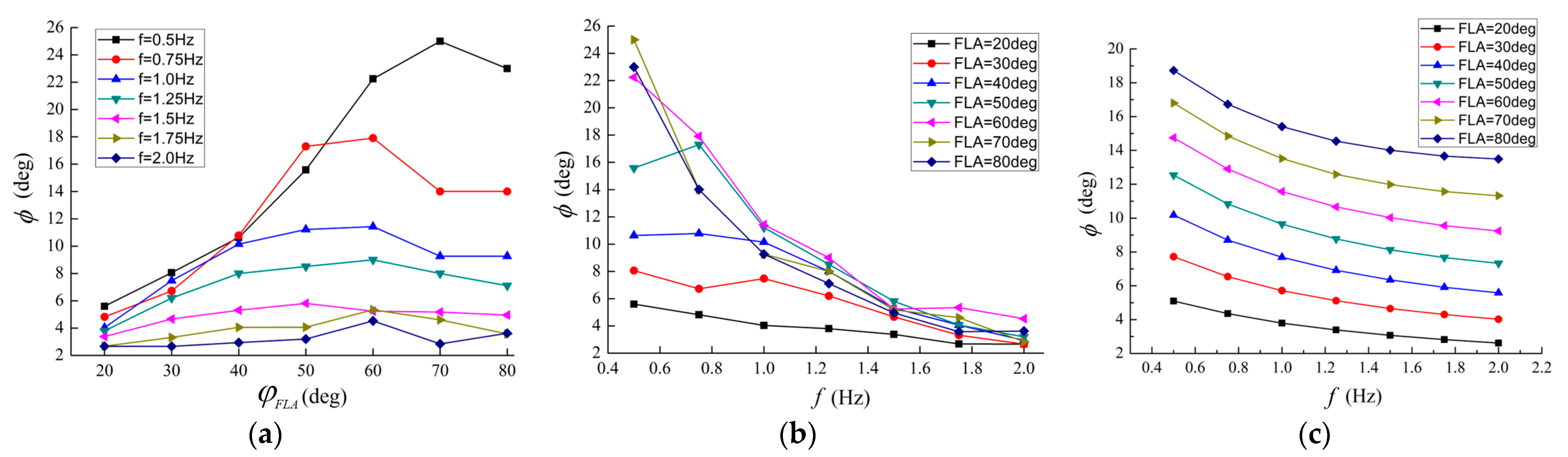
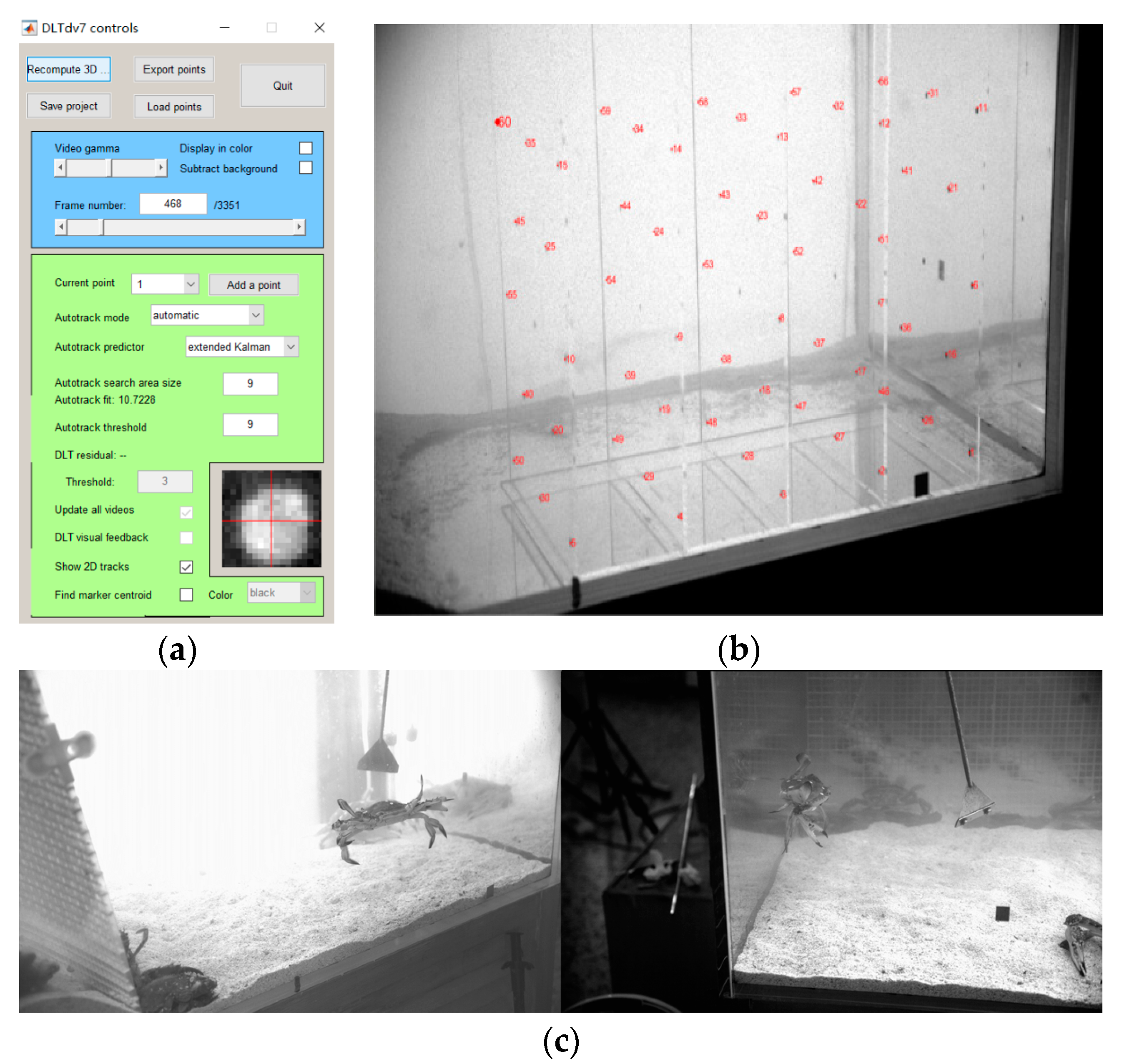
2.3. Three-Dimensional Kinematics Capture
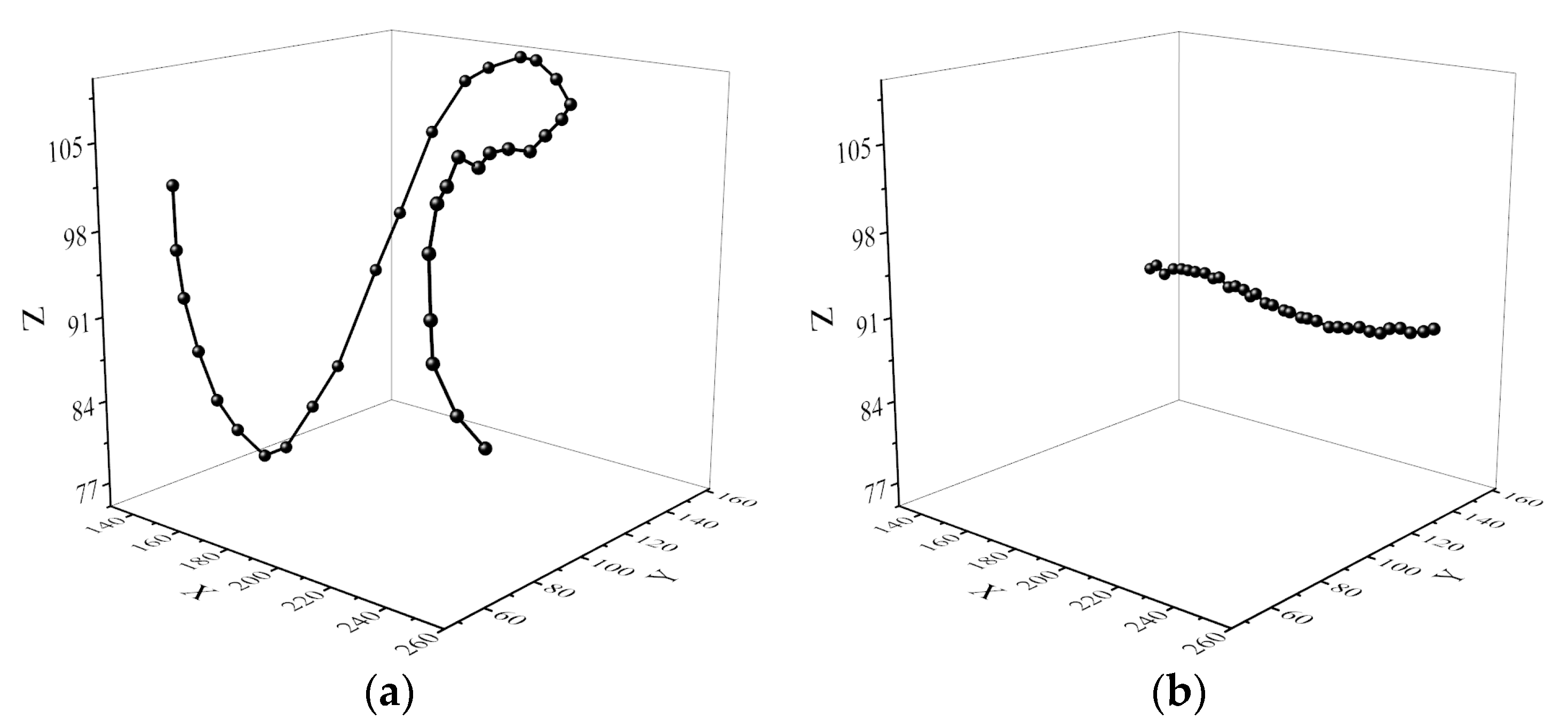
2.4. Kinematics Data
3. The Design of the Crab Robot
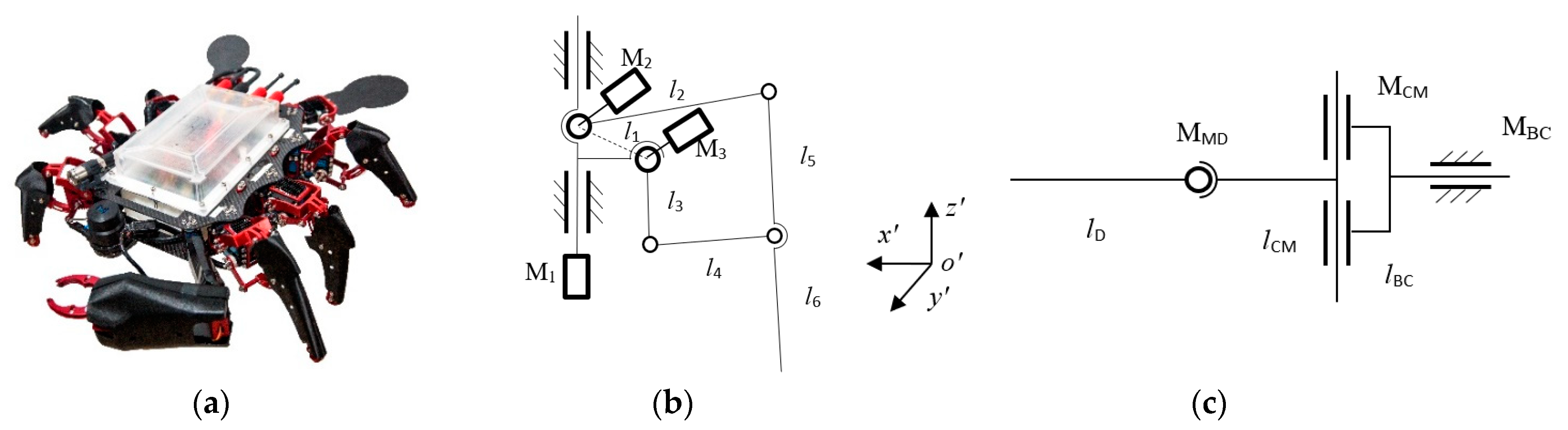
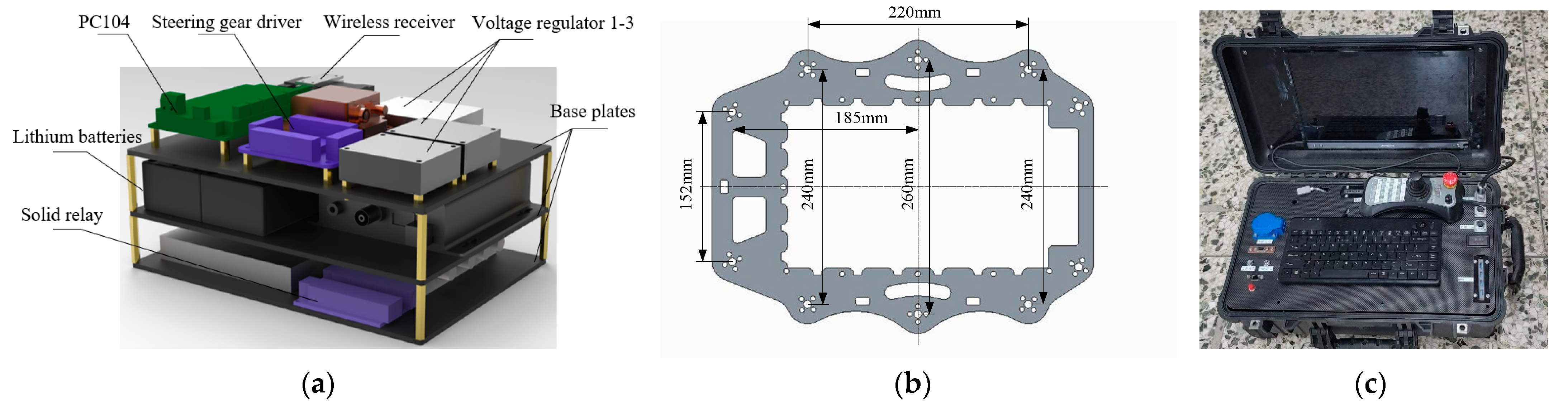
3.1. The Structure Design
3.2. Analyzing and Modeling for Walking Leg
3.3. Analyzing and Modeling for Swimming Leg
4. Experiment
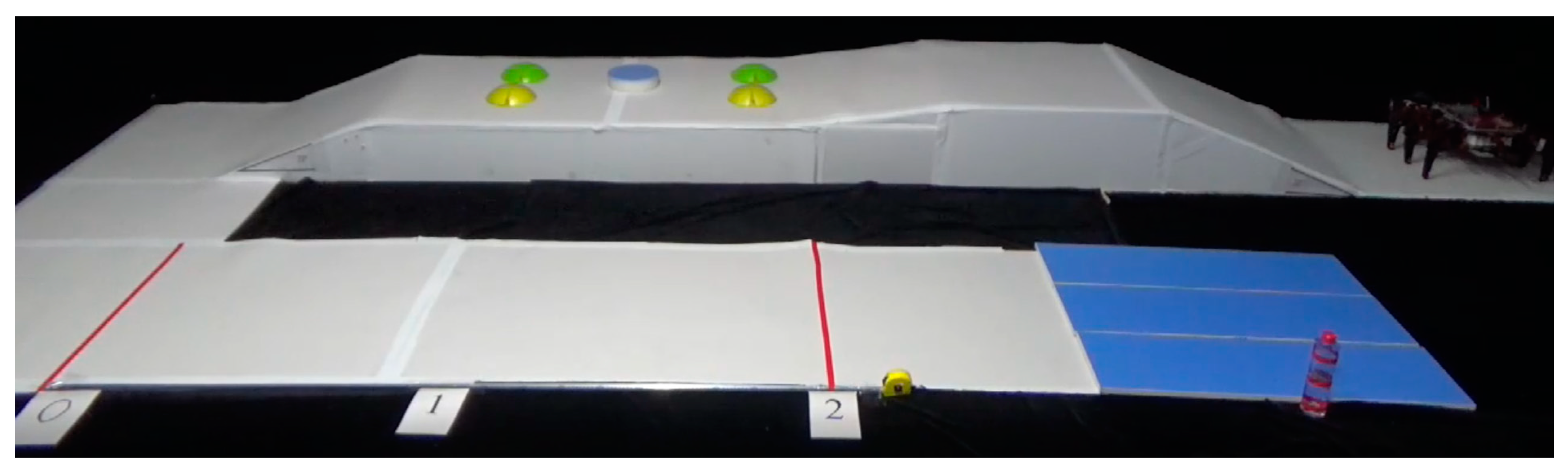
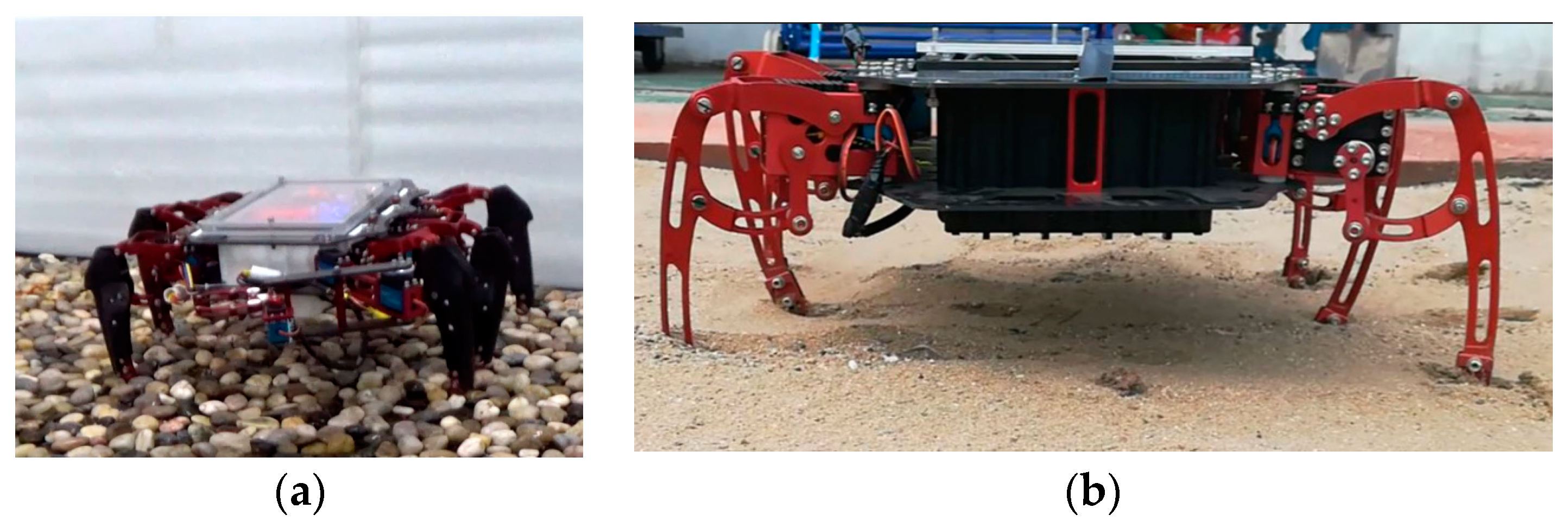
4.1. Walking Experiments
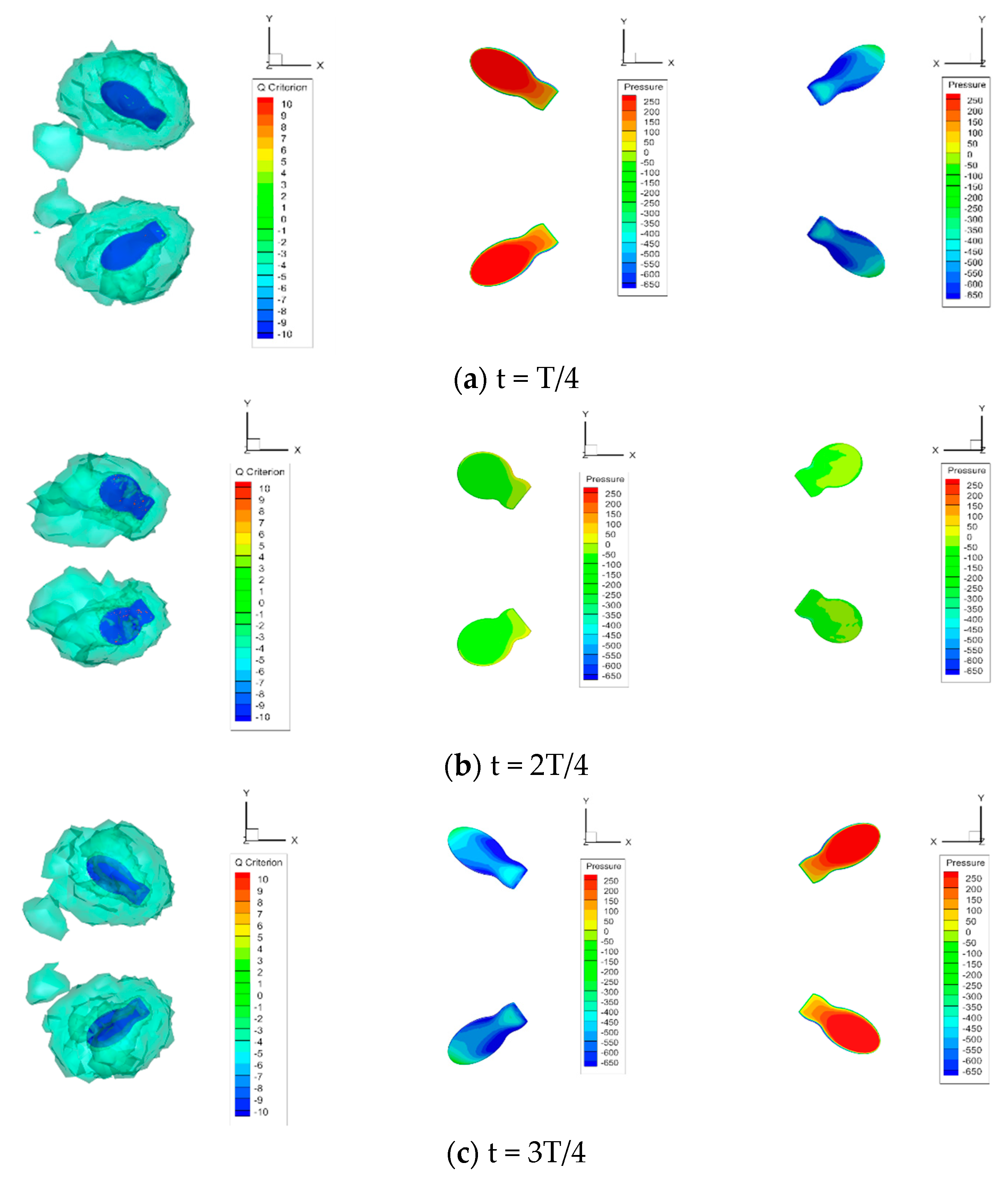
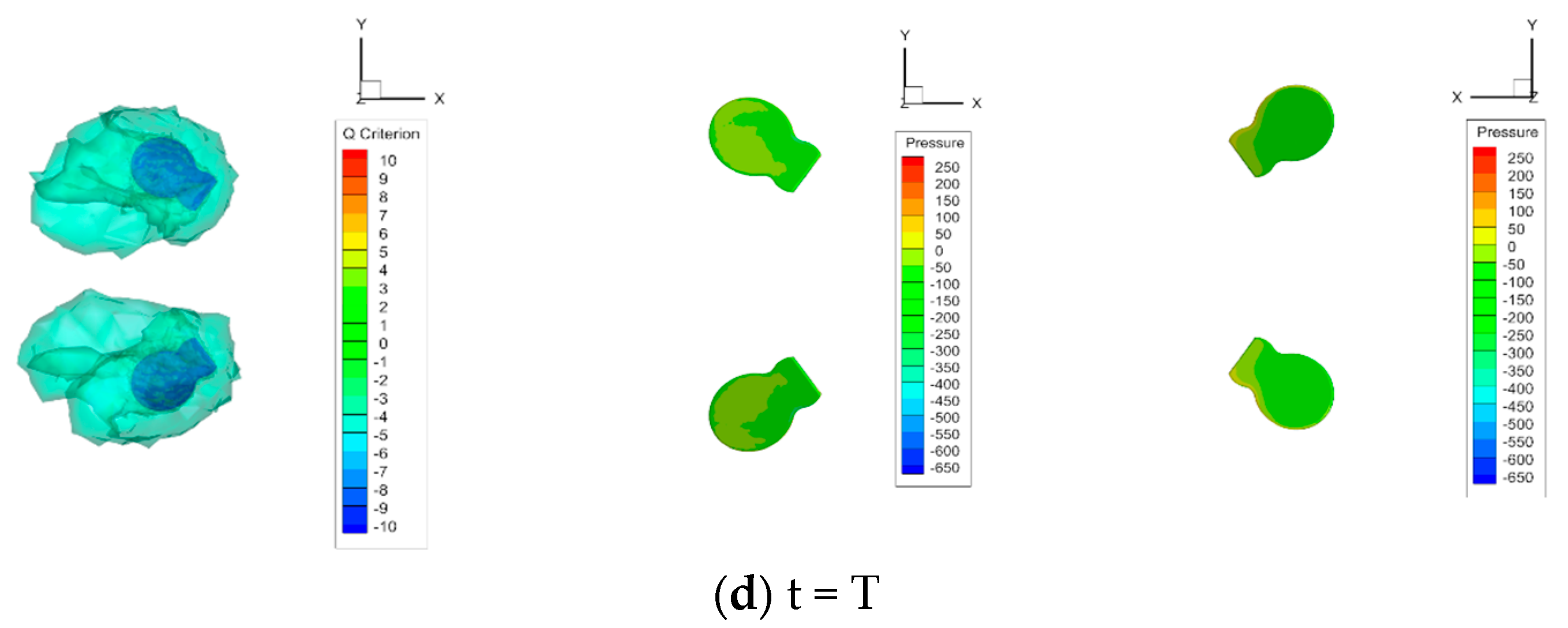
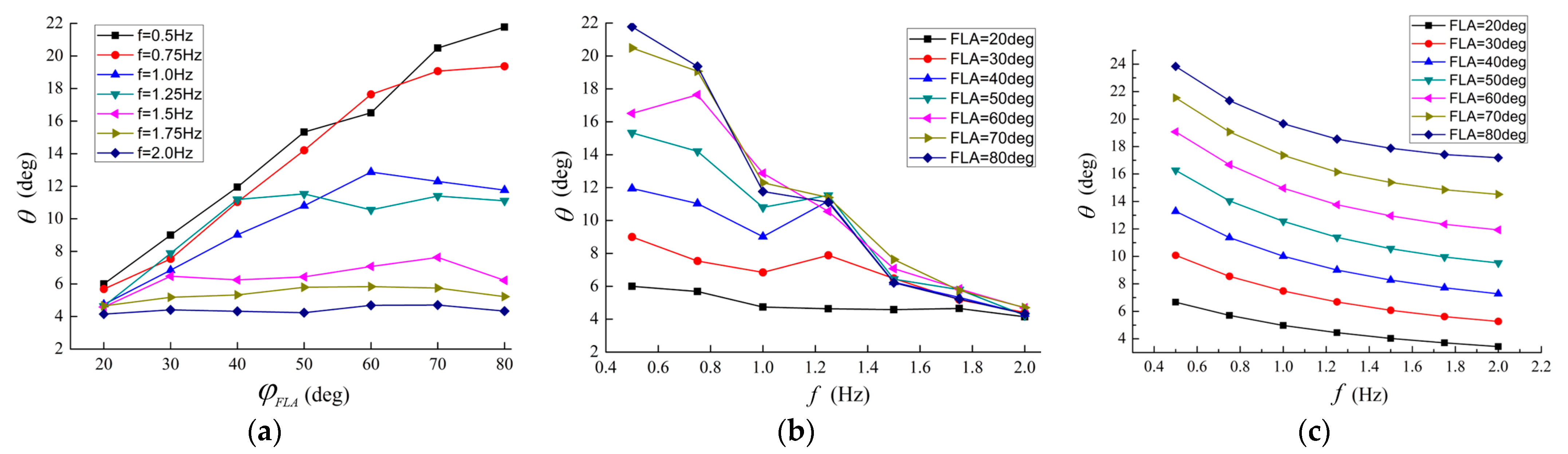
4.2. Swimming Experiments
5. Conclusions and Future Work
- A typical swimming pattern was obtained by observing and digitizing the swimming process of crabs. According to the observation results, two swimming gaits are designed for the crab robot, which has advantages in swimming speed and stability respectively.
- A bionic crab robot with multi-modal motion capability is proposed, and the motion capability is verified in a variety of typical amphibious environments.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Georgiades, C.; Nahon, M.; Buehler, M. Simulation of an underwater hexapod robot. Ocean Eng. 2009, 36, 39–47. [Google Scholar] [CrossRef]
- Jun, B.H.; Shim, H.; Kim, B.; Park, J.Y.; Baek, H.; Lee, P.M.; Kim, W.J.; Park, Y.S. Preliminary Design of the Multi-Legged Underwater Walking Robot CR200. In Proceedings of the OCEANS MTS/IEEE Conference, Yeosu, Korea, 21–24 May 2012. [Google Scholar]
- Ayers, J. Underwater walking. Arthropod Struct. Dev. 2004, 33, 347–360. [Google Scholar] [CrossRef] [PubMed]
- Ren, K.; Yu, J.C. Research status of bionic amphibious robots: A review. Ocean Eng. 2021, 227, 108862. [Google Scholar] [CrossRef]
- Romano, D.; Rossetti, G.; Stefanini, C. Learning on a chip: Towards the development of trainable biohybrid sensors by investigating cognitive processes in non-marine Ostracoda via a miniaturised analytical system. Biosyst. Eng. 2022, 213, 162–174. [Google Scholar] [CrossRef]
- Bierbach, D.; Lukas, J.; Bergmann, A.; Elsner, K.; Hoehne, L.; Weber, C.; Weimar, N.; Arias-Rodriguez, L.; Moenck, H.J.; Hai, N.; et al. Insights into the Social Behavior of Surface and Cave-Dwelling Fish (Poecilia mexicana) in Light and Darkness through the Use of a Biomimetic Robot. Front. Robot. AI 2018, 5, 3. [Google Scholar] [CrossRef] [PubMed]
- Spinello, C.; Yang, Y.; Macri, S.; Porfiri, M. Zebrafish Adjust Their Behavior in Response to an Interactive Robotic Predator. Front. Robot. AI 2019, 6, 38. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Katzschmann, R.K.; DelPreto, J.; MacCurdy, R.; Rus, D. Exploration of underwater life with an acoustically controlled soft robotic fish. Sci. Robot. 2018, 3, eaar3449. [Google Scholar] [CrossRef] [Green Version]
- Graf, N.M.; Grezmak, J.E.; Daltorio, K.A. Get a grip: Inward dactyl motions improve efficiency of sideways-walking gait for an amphibious crab-like robot. Bioinspir. Biomim. 2022, 17, 066008. [Google Scholar] [CrossRef]
- Greiner, H.; Shectman, A.; Won, C.; Elsley, R.; Beith, P. Autonomous Legged Underwater Vehicles for Near Land Warfare. In Proceedings of the Symposium on Autonomous Underwater Vehicle Technology, Monterey, CA, USA, 2–6 June 1996; pp. 41–48. [Google Scholar]
- Liu, Y.W.; Jiang, H.Z. Optimum Curvature Characteristics of Body/Caudal Fin Locomotion. J. Mar. Sci. Eng. 2021, 9, 537. [Google Scholar] [CrossRef]
- Wang, S.Y.; Han, Y.; Mao, S.T. Innovation Concept Model and Prototype Validation of Robotic Fish with a Spatial Oscillating Rigid Caudal Fin. J. Mar. Sci. Eng. 2021, 9, 435. [Google Scholar] [CrossRef]
- Liu, Q.M.; Chen, H.; Wang, Z.H.; He, Q.; Chen, L.K.; Li, W.K.; Li, R.P.; Cui, W.C. A Manta Ray Robot with Soft Material Based Flapping Wing. J. Mar. Sci. Eng. 2022, 10, 962. [Google Scholar] [CrossRef]
- Zhang, D.L.; Pan, G.; Cao, Y.H.; Huang, Q.G.; Cao, Y. A Novel Integrated Gliding and Flapping Propulsion Biomimetic Manta-Ray Robot. J. Mar. Sci. Eng. 2022, 10, 924. [Google Scholar] [CrossRef]
- Cao, Y.H.; Ma, S.M.; Cao, Y.Z.; Pan, G.; Huang, Q.G.; Cao, Y. Similarity Evaluation Rule and Motion Posture Optimization for a Manta Ray Robot. J. Mar. Sci. Eng. 2022, 10, 908. [Google Scholar] [CrossRef]
- Dong, Z.H.; Bi, S.S.; Liu, T. Research on Whipping and Jetting Combined Swimming Behavior of Solen strictus Gould. J. Mar. Sci. Eng. 2021, 9, 1086. [Google Scholar] [CrossRef]
- Dudek, G.; Giguere, P.; Prahacs, C.; Saunderson, S.; Sattar, J.; Torres-Mendez, L.A.; Jenkin, M.; German, A.; Hogue, A.; Ripsman, A.; et al. AQUA: An amphibious autonomous robot. Computer 2007, 40, 46–53. [Google Scholar] [CrossRef]
- Altendorfer, R.; Moore, N.; Komsuolu, H.; Buehler, M.; Brown, H.B.; McMordie, D.; Saranli, U.; Full, R.; Koditschek, D.E. RHex: A biologically inspired hexapod runner. Auton. Robot. 2001, 11, 207–213. [Google Scholar] [CrossRef] [Green Version]
- Saranli, U.; Buehler, M.; Koditschek, D.E. RHex: A simple and highly mobile hexapod robot. Int. J. Robot. Res. 2001, 20, 616–631. [Google Scholar] [CrossRef] [Green Version]
- Song, X.G.; Zhang, X.L.; Meng, X.Y.; Chen, C.J.; Huang, D.S. Gait optimization of step climbing for a hexapod robot. J. Field Robot. 2022, 39, 55–68. [Google Scholar] [CrossRef]
- Li, Y.X.; Chen, L.G.; Wang, Y.; Ren, C. Design and experimental evaluation of the novel undulatory propulsors for biomimetic underwater robots. Bioinspiration Biomim. 2021, 16, 056005. [Google Scholar] [CrossRef]
- Li, Z.C.; Chao, X.; Hameed, I.; Li, J.A.; Zhao, W.; Jing, X.J. Biomimetic omnidirectional multi-tail underwater robot. Mech. Syst. Signal Process. 2022, 173, 109056. [Google Scholar] [CrossRef]
- Romano, D.; Wahi, A.; Miraglia, M.; Stefanini, C. Development of a Novel Underactuated Robotic Fish with Magnetic Transmission System. Machines 2022, 10, 755. [Google Scholar] [CrossRef]
- Gorner, M.; Wimbock, T.; Baumann, A.; Fuchs, M.; Bahs, T.; Grebenstein, M.; Borst, C.; Butterfass, J.; Hirzinger, G. The DLR-Crawler: A Testbed for Actively Compliant Hexapod Walking Based on the Fingers of DLR-Hand II. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 1525–1531. [Google Scholar]
- Long, J.H.; Schumacher, J.; Livingston, N.; Kemp, M. Four flippers or two? Tetrapodal swimming with an aquatic robot. Bioinspiration Biomim. 2006, 1, 20–29. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, H.; Wu, R.; Li, C.L.; Zang, X.Z.; Zhu, Y.H.; Jin, H.Z.; Zhang, X.H.; Zhao, J. Adaptive motion planning for HITCR-II HEXAPOD robot. J. Mech. Med. Biol. 2017, 17, 1740040. [Google Scholar] [CrossRef]
- Vidal-Gadea, A.G.; Rinehart, M.D.; Belanger, J.H. Skeletal adaptations for forwards and sideways walking in three species of decapod crustaceans. Arthropod Struct. Dev. 2008, 37, 95–108. [Google Scholar] [CrossRef]
- Chen, Y.; Grezmak, J.E.; Graf, N.M.; Daltorio, K.A. Sideways crab-walking is faster and more efficient than forward walking for a hexapod robot. Bioinspiration Biomim. 2022, 17, 046001. [Google Scholar] [CrossRef] [PubMed]
- Kawai, T.; Gunji, Y.P. How do soldier crabs behave when seeing vibrating robots? Biosystems 2022, 222, 104776. [Google Scholar] [CrossRef]
- Gao, L.; Yin, J.; Zhu, E.; Liu, T.; Chen, W.; Qiu, M. Mechanical amelioration to improve hexapod robot speed. Int. J. Embed. Syst. 2018, 10, 217–224. [Google Scholar] [CrossRef]
- Wang, G.; Chen, X.; Yang, S.X.; Jia, P.; Yan, X.Y.; Xie, J. Subsea crab bounding gait of leg-paddle hybrid driven shoal crablike robot. Mechatronics 2017, 48, 1–11. [Google Scholar] [CrossRef]
- Hedrick, T.L. Software techniques for two- and three-dimensional kinematic measurements of biological and biomimetic systems. Bioinspiration Biomim. 2008, 3, 034001. [Google Scholar] [CrossRef]
- Abdel-Aziz, Y.I.; Karara, H.M. Direct Linear Transformation from Comparator Coordinates into Object Space Coordinates in Close-Range Photogrammetry. Photogramm. Eng. Remote Sens. 2015, 81, 103–107. [Google Scholar] [CrossRef]
- Chen, Y.Z.; Chen, B.; Zhan, J.Y. Decentralized Consensus Criteria of Linear Multi-agent Systems via Directed-Spanning-Tree-Based Linear Transformation. In Proceedings of the Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; pp. 5350–5354. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link i | ||||
|---|---|---|---|---|
| 1 | 0 | 0 | 0 | |
| 2 | 0 | 0 | 0 | |
| 3 | 90 | l2 | 0 | |
| 4 | 0 | 0 | l = l5 + l6 | −l |
| Flapping Parameters | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Left paddle | 1.0 Hz | 0° | 30° | 0° | 30° | 30° | 40° | 30° | 90° |
| Right paddle | 1.0 Hz | 0° | −30° | 0° | 30° | −30° | −40° | 30° | 90° |
| (deg) | 20 | 30 | 40 | 50 | 60 | 70 | 80 |
|---|---|---|---|---|---|---|---|
| gait 1 (m/s) | 0.090 | 0.157 | 0.200 | 0.213 | 0.217 | 0.245 | 0.241 |
| gait 2 (m/s) | 0.105 | 0.186 | 0.221 | 0.245 | 0.265 | 0.249 | 0.239 |
| Parameters | Value | Unit | |
|---|---|---|---|
| 1 | Walking speed on land | 0.17 | m/s |
| 2 | Walking speed underwater | 0.14 | m/s |
| 3 | Underwater working depth | 10 | m |
| 4 | Grade ability on land | 20 | deg |
| 5 | Obstacle crossing ability on land | diameter 200 × height 50 | mm |
| 6 | Grasping ability on land | 300 | g |
| 7 | Walking ability on gravel ground | diameter 30 | mm |
| 8 | Swimming speed | 0.265 | m/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Li, J.; Hu, S.; Han, S.; Liu, K.; Pan, B.; Wang, J.; Wang, G.; Ma, X. Study on the Design and Experimental Research on a Bionic Crab Robot with Amphibious Multi-Modal Movement. J. Mar. Sci. Eng. 2022, 10, 1804. https://doi.org/10.3390/jmse10121804
Chen X, Li J, Hu S, Han S, Liu K, Pan B, Wang J, Wang G, Ma X. Study on the Design and Experimental Research on a Bionic Crab Robot with Amphibious Multi-Modal Movement. Journal of Marine Science and Engineering. 2022; 10(12):1804. https://doi.org/10.3390/jmse10121804
Chicago/Turabian StyleChen, Xi, Jiawei Li, Shihao Hu, Songjie Han, Kaixin Liu, Biye Pan, Jixin Wang, Gang Wang, and Xinmeng Ma. 2022. "Study on the Design and Experimental Research on a Bionic Crab Robot with Amphibious Multi-Modal Movement" Journal of Marine Science and Engineering 10, no. 12: 1804. https://doi.org/10.3390/jmse10121804