
A Decision-Support Model for the Generation of Marine Green Tide Disaster Emergency Disposal Plans

Abstract
:1. Introduction
2. Background to the Problem
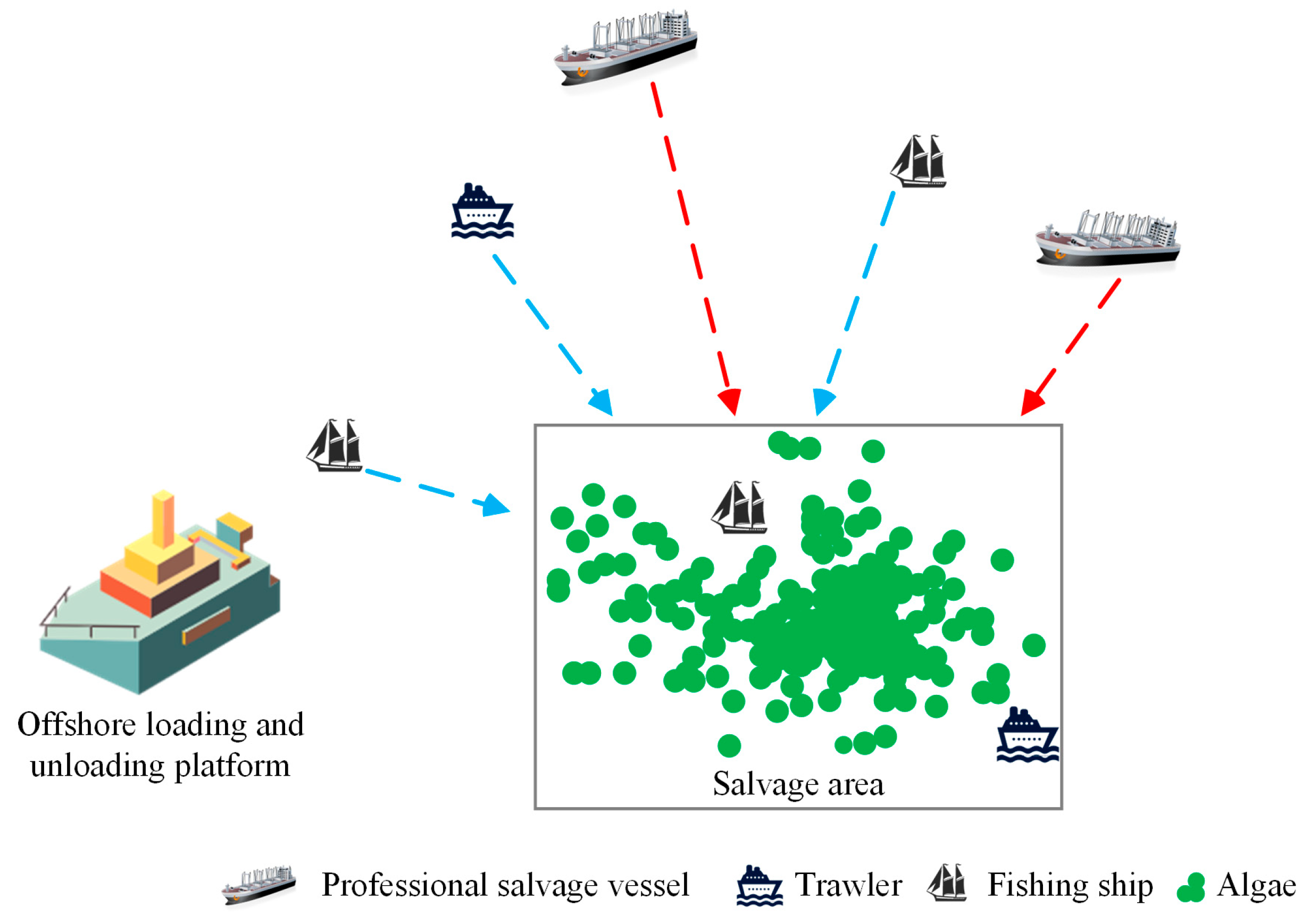
2.1. Problem Description
2.2. Green Tide Drift Prediction
3. Methodology: A Decision-Support Model for Green Tide Disasters
3.1. Assumptions
- (1)
- Prior to making decisions regarding emergency disposal, the distribution and biomass of green tides have been determined, and green tides will not grow during emergency disposal efforts.
- (2)
- The maritime environment remains stable during the emergency disposal efforts, so the drift speed of green tide remains constant.
- (3)
- Salvage vessels may perform several round trips between the offshore loading and unloading platform and the salvage area to unload the salvaged algae. The offshore loading and unloading platform has sufficient cargo capacity.
- (4)
- The model does not account for the unloading time of the algae. Since the tonnage of emergency disposal vessels is generally small, there is no obvious difference in the overall unloading time.
3.2. Decision Variables
3.3. Model Parameters
3.4. Constraints
- (1)
- To ensure that salvage vessels are working under a safe environment, the maximum allowable sea state of resource should be greater than the current sea state level:
- (2)
- During the salvage process, the number of vessels that can be accommodated in the salvage area is limited. Overcrowding between vessels will limit the range of activities of the vessels, thus affecting the efficiency of algae salvaged. At the same time, overcrowding between vessels can also lead to vessel collisions, thus causing accidents. Therefore, the total number of resources selected must be less than or equal to the maximum number of vessels that can be accommodated in the salvage area.
- (3)
- Due to the drift of the green tide, the distance between the vessel and the salvage area is constantly changing. Here, we use a mathematical derivation to determine the travel time when the vessel meets the salvage area. The positions of the nodes at sea are shown in Figure 2, where is the position of resource , is the position of salvage area, and is where resource meets salvage area. Based on the cosine theorem, the following equation is formulated:
- (4)
- To allocate time reasonably, the moment when resource first arrives at salvage area should be less than the maximum working time, which is defined as 12 h in this model:
3.5. The Single-Objective Model
3.6. The Multi-Objective Model
4. Algorithm Design and Model Solving
4.1. The Main Procedures of GA for Solving the Single-Objective Model
4.2. An Improved NSGA-II (IMNAGA-II) for Solving the Multi-Objective Model
- (1)
- and
- (2)
- or
4.3. Decision Making
5. Case Implementation and Analysis
5.1. Test Case
- GA: , , , .
- PSO: The number of particles , , the learning factors , the maximum inertial weight , the minimum inertial weight , the maximum velocity of particles , the minimum velocity of particles .
- SA: , , the initial temperature of simulated annealing , the temperature attenuation coefficient .
- IMNSGA-II: , , , , , .
- NSGA-II: , , , .
5.2. Single-Objective Optimization Analysis
5.3. Multi-Objective Optimization Analysis
5.4. Decision Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ren, C.-G.; Liu, Z.-Y.; Zhong, Z.-H.; Wang, X.-L.; Qin, S. Integrated biotechnology to mitigate green tides. Environ. Pollut. 2022, 309, 119764. [Google Scholar] [CrossRef]
- Wang, S.; Zhao, L.; Wang, Y.; Zhang, H.; Li, F.; Zhang, Y. Distribution characteristics of green tides and its impact on environment in the Yellow Sea. Mar. Environ. Res. 2022, 181, 105756. [Google Scholar] [CrossRef]
- Schreyers, L.; van Emmerik, T.; Biermann, L.; Le Lay, Y.-F. Spotting Green Tides over Brittany from Space: Three Decades of Monitoring with Landsat Imagery. Remote. Sens. 2021, 13, 1408. [Google Scholar] [CrossRef]
- Webster, R.K.; Linton, T. Development and implementation of Sargassum Early Advisory System (SEAS). Shore Beach 2013, 81, 1–6. [Google Scholar]
- Ye, N.; Zhang, X.; Mao, Y.; Liang, C.; Xu, D.; Zou, J.; Zhuang, Z.; Wang, Q. ‘Green tides’ are overwhelming the coastline of our blue planet: Taking the world’s largest example. Ecol. Res. 2011, 26, 477–485. [Google Scholar] [CrossRef]
- Zhou, M.-J.; Liu, D.-Y.; Anderson, D.M.; Valiela, I. Introduction to the Special Issue on green tides in the Yellow Sea. Estuar. Coast. Shelf Sci. 2015, 163, 3–8. [Google Scholar] [CrossRef] [Green Version]
- Lü, X.; Qiao, F. Distribution of sunken macroalgae against the background of tidal circulation in the coastal waters of Qingdao, China, in summer 2008. Geophys. Res. Lett. 2008, 35, 92–101. [Google Scholar] [CrossRef]
- Sun, K.; Ren, J.S.; Bai, T.; Zhang, J.; Liu, Q.; Wu, W.; Zhao, Y.; Liu, Y. A dynamic growth model of Ulva prolifera: Application in quantifying the biomass of green tides in the Yellow Sea, China. Ecol. Model. 2020, 428, 109072. [Google Scholar] [CrossRef]
- Wu, H.; Gao, G.; Zhong, Z.; Li, X.; Xu, J. Physiological acclimation of the green tidal alga Ulva prolifera to a fast-changing environment. Mar. Environ. Res. 2018, 137, 1–7. [Google Scholar] [CrossRef]
- Shanmugam, P.; Suresh, M.; Sundarabalan, B. OSABT: An Innovative Algorithm to Detect and Characterize Ocean Surface Algal Blooms. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1879–1892. [Google Scholar] [CrossRef]
- Devred, E.; Martin, J.; Sathyendranath, S.; Stuart, V.; Horne, E.; Platt, T.; Forget, M.-H.; Smith, P. Development of a conceptual warning system for toxic levels of Alexandrium fundyense in the Bay of Fundy based on remote sensing data. Remote Sens. Environ. 2018, 211, 413–424. [Google Scholar] [CrossRef]
- Zhang, B.; Guo, J.; Li, Z.; Cheng, Y.; Zhao, Y.; Boota, M.W.; Zhang, Y.; Feng, L. Identifying the spatio-temporal variations of Ulva prolifera disasters in all life cycle. J. Water Clim. Chang. 2022, 13, 629–644. [Google Scholar] [CrossRef]
- Huang, K.; Jiang, Y.; Yuan, Y.; Zhao, L. Modeling multiple humanitarian objectives in emergency response to large-scale disasters. Transp. Res. Part E Logist. Transp. Rev. 2015, 75, 1–17. [Google Scholar] [CrossRef]
- Xiong, W.; van Gelder, P.; Yang, K. A decision support method for design and operationalization of search and rescue in maritime emergency. Ocean Eng. 2020, 207, 107399. [Google Scholar] [CrossRef]
- Garrett, R.A.; Sharkey, T.C.; Grabowski, M.; Wallace, W.A. Dynamic resource allocation to support oil spill response planning for energy exploration in the Arctic. Eur. J. Oper. Res. 2016, 257, 272–286. [Google Scholar] [CrossRef] [Green Version]
- Hu, Y.; Zhang, A.; Tian, W.; Zhang, J.; Hou, Z. Multi-Ship Collision Avoidance Decision-Making Based on Collision Risk Index. J. Mar. Sci. Eng. 2020, 8, 640. [Google Scholar] [CrossRef]
- Lv, Y.; Huang, G.; Li, Y.; Yang, Z.; Liu, Y.; Cheng, G. Planning regional water resources system using an interval fuzzy bi-level programming method. J. Environ. Inform. 2010, 16, 43–56. [Google Scholar] [CrossRef]
- Qian, X.; Jia, S.; Huang, K.; Chen, H.; Yuan, Y.; Zhang, L. Optimal design of Kaibel dividing wall columns based on improved particle swarm optimization methods. J. Clean. Prod. 2020, 273, 123041. [Google Scholar] [CrossRef]
- Jing, R.; Wang, M.; Zhang, Z.; Liu, J.; Liang, H.; Meng, C.; Shah, N.; Li, N.; Zhao, Y. Comparative study of posteriori decision-making methods when designing building integrated energy systems with multi-objectives. Energy Build. 2019, 194, 123–139. [Google Scholar] [CrossRef]
- Liu, F.; Zhang, J.; Liu, T. A PSO-algorithm-based consensus model with the application to large-scale group decision-making. Complex Intell. Syst. 2020, 6, 287–298. [Google Scholar] [CrossRef]
- Yi, W.; Kumar, A. Ant colony optimization for disaster relief operations. Transp. Res. Part E Logist. Transp. Rev. 2007, 43, 660–672. [Google Scholar] [CrossRef]
- Ye, X.; Chen, B.; Li, P.; Jing, L.; Zeng, G. A simulation-based multi-agent particle swarm optimization approach for supporting dynamic decision making in marine oil spill responses. Ocean Coast. Manag. 2019, 172, 128–136. [Google Scholar] [CrossRef]
- Yannibelli, V.; Amandi, A. Integrating a multi-objective simulated annealing algorithm and a multi-objective evolutionary algorithm to solve a multi-objective project scheduling problem. Expert Syst. Appl. 2013, 40, 2421–2434. [Google Scholar] [CrossRef]
- Lu, X. Research on Biological Population Evolutionary Algorithm and Individual Adaptive Method Based on Quantum Computing. Wirel. Commun. Mob. Comput. 2022, 2022, 5188335. [Google Scholar] [CrossRef]
- Xiong, J.; Liu, X.; Zhu, X.; Zhu, H.; Li, H.; Zhang, Q. Semi-Supervised Fuzzy C-Means Clustering Optimized by Simulated Annealing and Genetic Algorithm for Fault Diagnosis of Bearings. IEEE Access 2020, 8, 181976–181987. [Google Scholar] [CrossRef]
- Gao, S.; Huang, J.; Cao, Y.; Wu, J.; Zhong, S. Analysis on drifting path of Green Tides in the Yellow Sea in 2008 and 2009. Mar. Sci. 2014, 38, 86–90. [Google Scholar]
- Szwaykowska, K.; Zhang, F. Controlled Lagrangian Particle Tracking: Error Growth Under Feedback Control. IEEE Trans. Control Syst. Technol. 2018, 26, 874–889. [Google Scholar] [CrossRef]
- Lee, J.H.; Pang, I.-C.; Moon, I.-J.; Ryu, J.-H. On physical factors that controlled the massive green tide occurrence along the southern coast of the Shandong Peninsula in 2008: A numerical study using a particle-tracking experiment. J. Geophys. Res. Earth Surf. 2011, 116, C12036. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Li, K.; Hu, J.; Li, K. A genetic algorithm for task scheduling on heterogeneous computing systems using multiple priority queues. Inf. Sci. 2014, 270, 255–287. [Google Scholar] [CrossRef]
- Zheng, L.; Lu, Y.; Guo, M.; Guo, S.; Xu, C.-Z. Architecture-based design and optimization of genetic algorithms on multi- and many-core systems. Futur. Gener. Comput. Syst. 2014, 38, 75–91. [Google Scholar] [CrossRef]
- Kołodziej, J.; Khan, S.U. Multi-level hierarchic genetic-based scheduling of independent jobs in dynamic heterogeneous grid environment. Inf. Sci. 2012, 214, 1–19. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Dai, M.; Tang, D.; Giret, A.; Salido, M.A. Multi-objective optimization for energy-efficient flexible job shop scheduling problem with transportation constraints. Robot. Comput.-Integr. Manuf. 2019, 59, 143–157. [Google Scholar] [CrossRef]
- Zavadskas, E.K.; Mardani, A.; Turskis, Z.; Jusoh, A.; Nor, K.M. Development of TOPSIS method to solve complicated decision-making problems–an overview on developments from 2000 to 2015. Int. J. Inf. Technol. Decis. Mak. 2016, 15, 645–682. [Google Scholar] [CrossRef]
- Cheng, R.; Jin, Y. A social learning particle swarm optimization algorithm for scalable optimization. Inf. Sci. 2015, 291, 43–60. [Google Scholar] [CrossRef]
- Sarbijan, M.S.; Behnamian, J. Multi-fleet feeder vehicle routing problem using hybrid metaheuristic. Comput. Oper. Res. 2022, 141, 105696. [Google Scholar] [CrossRef]
- Han, X.; Dong, Y.; Yue, L.; Xu, Q. State Transition Simulated Annealing Algorithm for Discrete-Continuous Optimization Problems. IEEE Access 2019, 7, 44391–44403. [Google Scholar] [CrossRef]
- Kara, N.; Soualhia, M.; Belqasmi, F.; Azar, C.; Glitho, R.H. Genetic-based algorithms for resource management in virtualized IVR applications. J. Cloud Comput. 2014, 3, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Rashidnejad, M.; Ebrahimnejad, S.; Safari, J. A bi-objective model of preventive maintenance planning in distributed systems considering vehicle routing problem. Comput. Ind. Eng. 2018, 120, 360–381. [Google Scholar] [CrossRef]
- Xue, J.; Van Gelder, P.; Reniers, G.; Papadimitriou, E.; Wu, C. Multi-attribute decision-making method for prioritizing maritime traffic safety influencing factors of autonomous ships’ maneuvering decisions using grey and fuzzy theories. Saf. Sci. 2019, 120, 323–340. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description |
|---|---|
| Maximum number of salvage vessels that can be accommodated in the salvage area | |
| from its current position to the salvage area | |
| is to leave its current position for the salvage area | |
| Coordinates | Biomass of Green Tide in Salvaged Area (Ton) | Maximum Number of Salvage Vessels That Can Be Accommodated |
|---|---|---|
| 120.851° E/35.823° N | 1100 | 10 |
| Resource Number | Resources Type | Resources Particulars | ||||||
|---|---|---|---|---|---|---|---|---|
| ni | ||||||||
| B1 | Trawler A | 120.5091° E/35.2342° N | 4 | 20 | 8 | 8 | 4000 | 1 |
| B2 | Trawler B | 120.4220° E/35.4052° N | 4 | 25 | 9 | 9 | 4500 | 1 |
| B3 | Trawler C | 120.0464° E/35.7181° N | 5 | 30 | 10 | 12 | 5000 | 2 |
| B4 | Trawler D | 120.2350° E/36.0931° N | 4 | 22 | 8 | 8 | 4000 | 1 |
| B5 | Professional salvage vessel B | 120.6774° E/36.2301° N | 5 | 45 | 15 | 15 | 6000 | 1 |
| B6 | Professional salvage vessel B | 120.2108° E/35.8678° N | 5 | 50 | 18 | 18 | 6500 | 1 |
| B7 | Fishing ship A | 120.7196° E/35.6250° N | 4 | 3.23 | 8 | 5 | 1000 | 5 |
| B8 | Fishing ship B | 121.0184° E/36.0534° N | 4 | 3.37 | 8 | 6 | 1000 | 3 |
| B9 | Fishing ship C | 121.1489° E/35.7150° N | 4 | 4.43 | 9 | 8 | 1000 | 4 |
| B10 | Fishing ship D | 121.0317° E/35.6094° N | 4 | 4.42 | 10 | 8 | 1200 | 3 |
| No. | CPU(s) | ||
|---|---|---|---|
| GA | PSO | SA | |
| 1 | 7.89 | 11.56 | 10.89 |
| 2 | 7.49 | 11.54 | 10.69 |
| 3 | 7.66 | 11.61 | 10.80 |
| 4 | 7.38 | 11.55 | 10.65 |
| 5 | 7.61 | 11.43 | 10.79 |
| 6 | 7.42 | 11.50 | 10.61 |
| 7 | 7.51 | 11.45 | 10.65 |
| 8 | 7.51 | 11.55 | 10.76 |
| 9 | 7.53 | 11.41 | 10.65 |
| 10 | 7.55 | 11.45 | 10.78 |
| Avg | 7.555 | 11.505 | 10.727 |
| Algorithms | Chromosome | Emergency Disposal Plan | Disposal Capacity |
|---|---|---|---|
| GA | 0, 1, 2, 1, 1, 1, 0, 0, 2, 2 | 502.65 | |
| PSO | 1, 1, 2, 0, 1, 1, 0, 0, 3, 1 | 501 | |
| SA | 0, 1, 2, 1, 1, 1, 0, 0, 2, 2 | 502.65 |
| Disposal Capacity Weight | Cost Weight | Emergency Disposal Plan | Disposal Capacity | Cost |
|---|---|---|---|---|
| 0.1 | 0.9 | 24 | 3160 | |
| 0.2 | 0.8 | 24 | 3160 | |
| 0.3 | 0.7 | 144 | 10,820 | |
| 0.4 | 0.6 | 144 | 10,820 | |
| 0.5 | 0.5 | 249 | 20,420 | |
| 0.6 | 0.4 | 345 | 33,060 | |
| 0.7 | 0.3 | 417 | 44,700 | |
| 0.8 | 0.2 | 494.7 | 57,440 | |
| 0.9 | 0.1 | 494.7 | 57,440 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ai, B.; Zhang, D.; Jia, M.; Wang, X.; Gao, J.; Wang, L.; Li, B.; Shang, H. A Decision-Support Model for the Generation of Marine Green Tide Disaster Emergency Disposal Plans. J. Mar. Sci. Eng. 2022, 10, 1890. https://doi.org/10.3390/jmse10121890
Ai B, Zhang D, Jia M, Wang X, Gao J, Wang L, Li B, Shang H. A Decision-Support Model for the Generation of Marine Green Tide Disaster Emergency Disposal Plans. Journal of Marine Science and Engineering. 2022; 10(12):1890. https://doi.org/10.3390/jmse10121890
Chicago/Turabian StyleAi, Bo, Dan Zhang, Maoxin Jia, Xiaoliang Wang, Jingxia Gao, Lei Wang, Benshuai Li, and Hengshuai Shang. 2022. "A Decision-Support Model for the Generation of Marine Green Tide Disaster Emergency Disposal Plans" Journal of Marine Science and Engineering 10, no. 12: 1890. https://doi.org/10.3390/jmse10121890