1. Introduction
In the past decades, an increasing number of floating marine systems have been designed, produced and operated in the sea to adhere to the demand of exploring the ocean energy resources deeper and further away from the land [
1,
2,
3,
4,
5]. The typical floating systems for harvesting ocean resources include traditional oil and gas platforms [
2,
6,
7], as well as renewable energy devices, such as wind turbines, tidal/current turbines, wave energy converters and their associated operational systems [
4,
8,
9,
10].
There are three main types of mooring design for floating wind turbines: the catenary mooring system, semi-taut mooring system and taut mooring system. Most of the mooring systems under operations are catenary or semi-taut. Several catenary mooring configurations were proposed that could be accomplished with single or multi-connections [
1]. Astariz and Iglesias [
11] found the most appropriate mooring was CALM (catenary anchor leg mooring), which has the advantages of easy installation, lower cost and less effects of corrosions. However, the use of catenaries may suffer from wear and fatigue damage and affect the structure safety due to vortex-induced vibration. Gao and Moan [
12] also pointed out that a catenary line system usually consisting of chain links relies on the weight of links or clump weights to provide horizontal restoring force. If no clump weight is used, a very long mooring line of chain links must be considered to obtain adequate flexibility. Furthermore, catenary line systems will bring large, vertically downward loads to the floating structures. This could limit the allowable deck loads for floating wind turbines. Therefore, this concept might not be suitable in shallow waters.
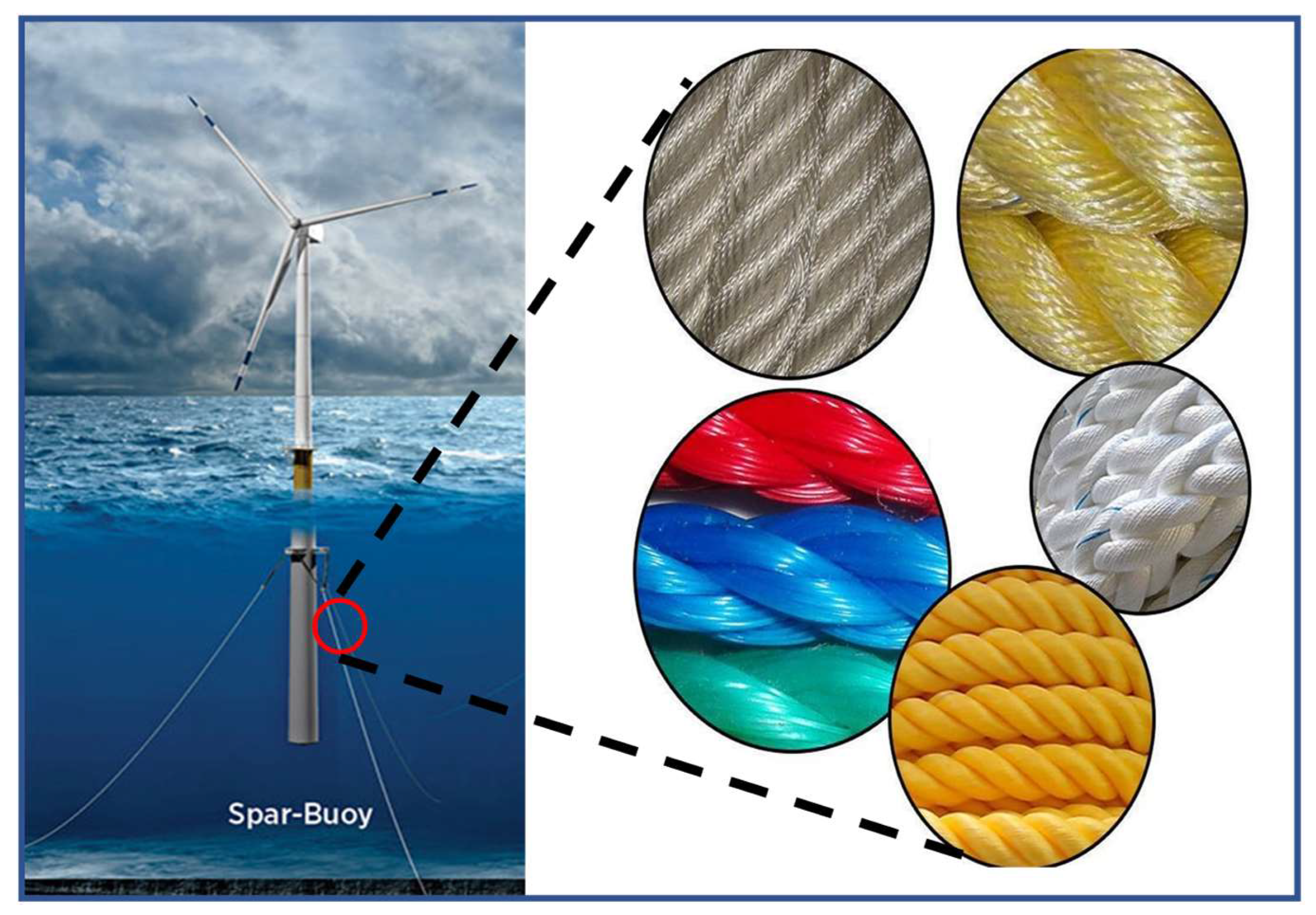
As shown in
Figure 1, with synthetic fibers becoming very promising mooring materials, the taut mooring system is treated as a good alternative of mooring system for floating wind turbines. The possible new materials, such as AI foam, might also be able to be used for the composition of the mooring lines after enhancement of the structural strength. The diameter sizes of those synthetic fiber ropes used for commercial purposes vary within the range of 16 mm to 240 mm [
13] and are typically made of nylon (polyamide), polyester (polyethylene terephthalate), aramid (para-aramid), or HMPE (high-modulus polyethylene). Synthetic fiber ropes are significantly lighter than other materials and, therefore, can be used in the water column of a taut mooring system. Casaubieilh [
14] found that the new generation of mooring system, taut configuration using tether mooring lines, can significantly reduce the loads on mooring lines, floating structure and anchors, and it can also reduce the device excursions when comparing to the conventional catenary moorings. The elastic properties of fiber ropes are also of interest to damp mooring loads, and they avoid snap loads [
13].
The nonlinear time-dependent mechanical properties of the taut mooring lines, such as synthetic fiber ropes, are found to be very complex [
15,
16]. Therefore, how to deal with the dynamics of the whole floating system composed by the floating structure and fiber ropes also becomes a complicated problem. Before the late 20th century, the oscillatory motion of floating structures was calculated without considering the dynamic response of the mooring cables and a linearized stiffness reaction from their mooring systems was presumed. This is the so-called quasi-static mooring analysis. However, for moored floating renewables, especially floating wind turbines and wave energy converters in shallow water, it has been pointed out lately that the mooring design must be an integral part of the whole floating system design [
17], as the mooring design can significantly influence the behaviors of the floating structures, the operations, the survival and maintenance. As a result of all the above, there is a great need for an accurate understanding of the dynamics of floating wind turbines coupled with the responses from fiber rope mooring lines and an accurate analysis of the body motion responses and the mooring tension of the associated mooring system.
Currently, many researchers have managed to experimentally investigate the dynamic performance of the floating renewables, such as floating wind turbines and wave energy converters with the taut mooring system, to disclose their coupling dynamic effects [
18,
19]. However, how to numerically solve the dynamic responses from fiber rope mooring lines is a critical problem during coupling analysis between floating structure and mooring lines. Fortunately, there has been some existing knowledge to use in the past decades. Researchers have established several frequency or time-domain modelling methods to consider the dynamics of traditional taut mooring lines, such as chains, steel wires, springs, etc., to couple with the floaters. The main time domain modelling approaches used for mooring dynamic analysis usually involve different spatial and temporal discretization methods based on either a lumped-mass model (LMM) [
19,
20,
21,
22] or slender rod model solved by either finite difference method (FDM) [
23,
24] or finite element method (FEM) [
25,
26,
27,
28]. These mooring dynamic models can also be applied into new taut mooring lines, such as fiber ropes. However, compared with chains and steel wires, fiber ropes usually suffer much larger elongations; thus, mooring dynamic models used for studying the dynamics of fiber ropes may also be required to change somehow. Currently, there is little research into the dynamics of the fiber ropes. Generally, the fiber rope mooring line is treated as having a constant storm stiffness in the calculations, considering the mooring line tension is the targeted parameter to be calculated as the interface between floating structure and fiber rope mooring lines. Thomsen et al. [
19] utilized LMM-based software, Orcaflex, to simulate a three-legged turret mooring system with synthetic lines for a wind/wave energy converter, known as a floating power plant. Generally, good agreement was found for the tensions in the lines. Nguyen et al. [
29] simplified the mooring line as a vertical elastic spring-mass system with a constant stiffness when studying the hydro-elastic responses of pontoon-type VLFS moored by vertical elastic lines. Xiong et al. [
30,
31] developed a dynamic method using the LMM to study the dynamics of the elastic mooring chain, which suffers large elongations under deep water by considering the soil–chain interaction for the embedded anchor chain. Qiao et al. [
32] conducted the dynamic finite element analysis of the taut mooring lines with chain–polyester–chain segments to investigate the slack–taut phenomenon. Because of many advantageous factors, including coding simplicity, computational efficiency, and earlier applications as a design and analysis tool, LMM is more widely used in the above studies. However, LMM is actually a simplified form with the order reduction of the FEM-based process. Depending on the implementation used, LMM formulations generally require many more elements to reach the similar accuracy of FEM assemblies. When comparing FDM with FEM, FEM can guarantee L2 stability using the Galerkin method, while FDM will not work if finite-differencing schemes are paired with incompatible integration techniques. Additionally, compared with the LMM and FEM, FDM are inherently more prone to numerical errors or drifts because the FDM formulation does not guarantee the conservation of energy.
This paper presents a time domain modelling method to study the dynamics of a spar-type floating wind turbine moored by the synthetic fiber mooring lines under regular waves. The simulations of motion response and the tension force on the mooring lines at the fairlead of the foundation with a three-point (T3) taut mooring system under regular waves are studied using traditional stiff and proposed tensile mooring line model. The dynamics of a spar-type floating wind turbine foundation moored by synthetic fiber mooring lines of different lengths and pretensions have been simulated. Comparative performance analysis of two-point (T2) and three-point (T3) taut mooring systems are also conducted. In a nutshell, the main contributions of the present work are:
- (1)
To overcome the drawbacks of the stiff mooring line model when calculating the dynamics of synthetic fiber ropes, am FEM formulation of tensile mooring line model is proposed to be capable of studying the statics and dynamics of tensile mooring lines experiencing large elongations.
- (2)
By integrating the tensile mooring line model and the Morison forces into the equations of motion, a time domain modelling code is developed to study the coupled dynamics of spar-type floating wind turbine foundation moored by synthetic fiber ropes.
- (3)
The effects of the taut mooring system configurations on the dynamic responses of a spar-type floating wind turbine foundation and the loads on the synthetic fiber mooring lines have been systematically investigated via changing mooring lengths and pretensions; the number of mooring lines: T2 and T3.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}