
Ontological Ship Behavior Modeling Based on COLREGs for Knowledge Reasoning




Abstract
:1. Introduction
2. Literature Review
2.1. Data-Driven Behavior Modelling
2.2. Knowledge-Driven Behavior Modeling
2.3. Behavior Modeling of COLREGs
3. Conceptual Modeling of Ship Object from COLREGs
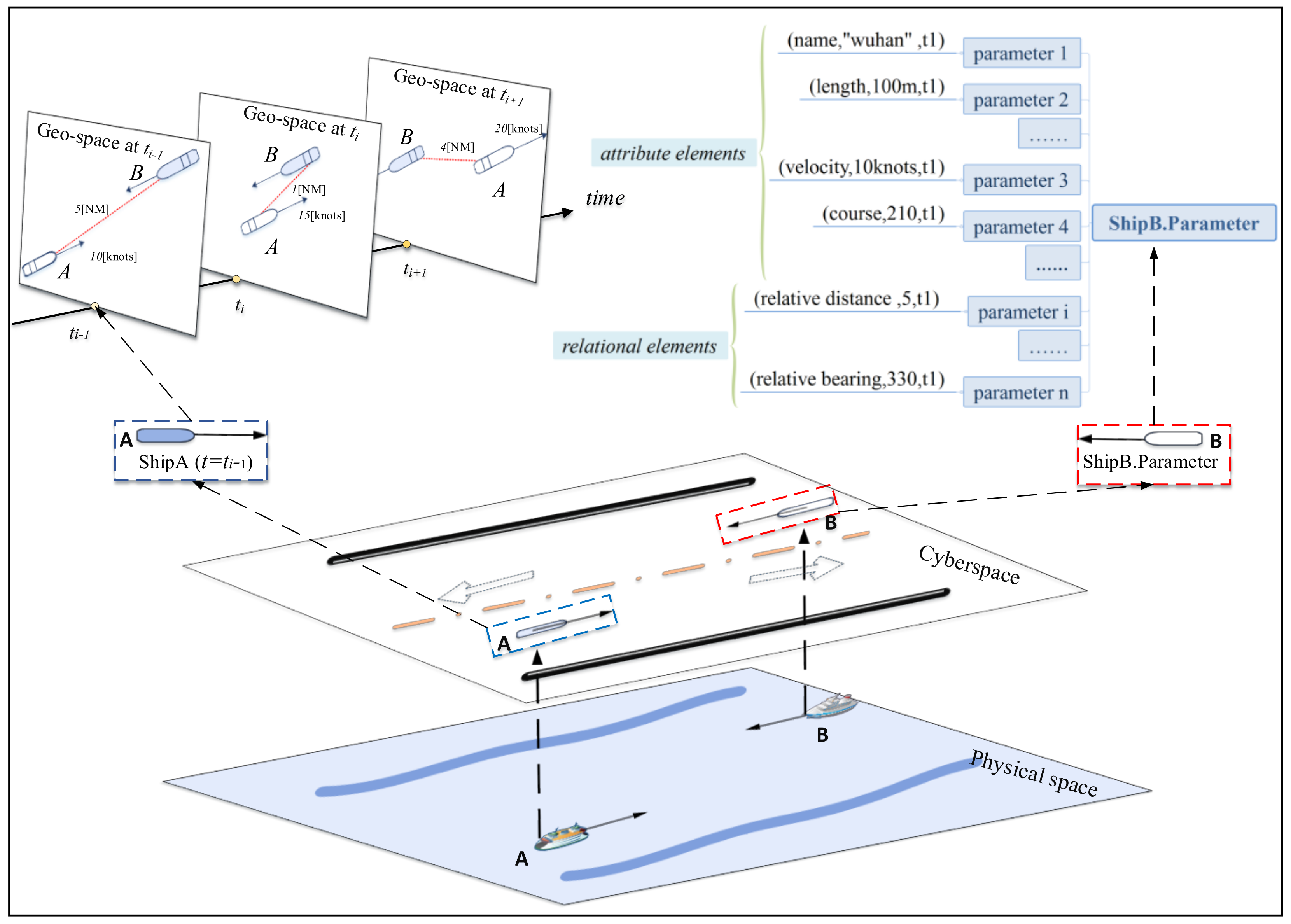
3.1. Conceptual Modeling of Ship Object
3.2. Expression of Elements of Ship Object
3.2.1. Attribute Elements
3.2.2. Relational Elements
- (1)
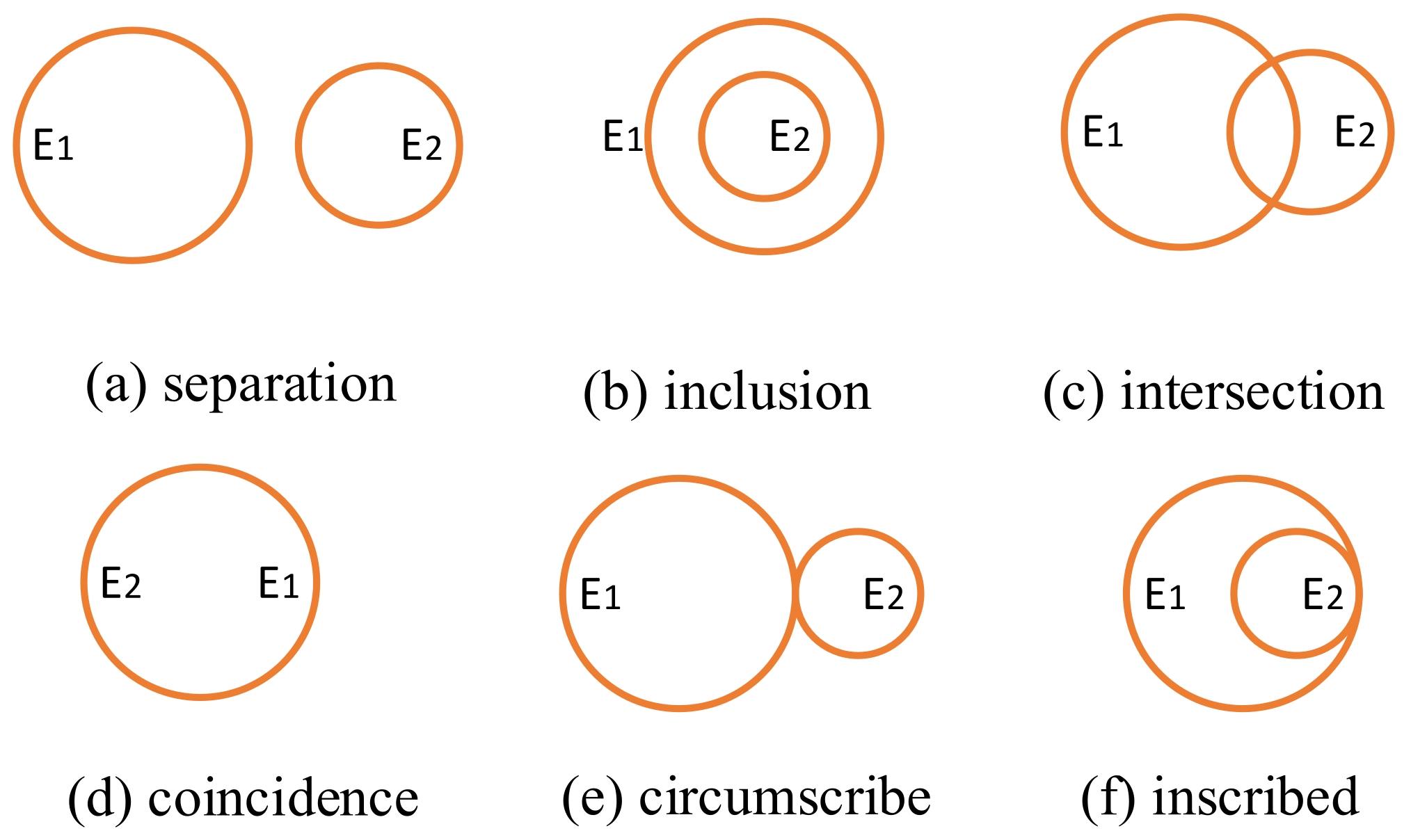
- Spatial relational elements
- (2)
- Time relational elements
- (3)
- Semantic relational elements
4. Conceptual Modeling of Ship Behavior and Its Expression
4.1. Conceptual Modeling of Ship Behavior
4.2. Formal Expression of Ship Behavior
4.2.1. Attribute Behavior
- -
- The change of velocity attribute implies the acceleration or deceleration attribute behavior;
- -
- The change of course attribute can be divided into turning left and right steering attribute behavior;
- -
- The change of signal attribute behavior refers to the signal number, color, and shape that will be changed in time scales
4.2.2. Relational Behavior
- The change of relative distance relation implies the “near” or “far away” relation behavior;
- The change of relative bearing relation can be divided into the angle of bearing turning smaller and the angle of bearing turning bigger;
5. Case Analysis
5.1. Ontological Expression of Ship Object Based on Rule 9
- The static attributes include ship’s type, call sign, size, etc.
- The dynamic attributes include some time-varying attributes, such as position, velocity, course, draft, sound signal, etc.
- The static attributes of narrow water channels are the name of the narrow water channel, the center position of each water depth; the width of the navigable water area; the boundary information of the narrow water channel.
- The dynamic attributes of narrow water channels are the flow velocity, flow direction, and visibility of narrow water channels.
- The time relations between the ship and the narrow water channel include the time before the ship enters the narrow water channel, after entering the narrow water channel, and when the ship moves in the narrow water channel.
- The spatial topological relationship includes the ship outside the narrow water channel and the ship in the narrow water channel. Ships are in narrow channel elbow waters or boundary waters, etc.
- The semantic relations include ships avoiding anchoring and crossing in narrow channels. Specific numerical values express the spatial position relationship and spatial distance relationship between ships and ships; semantic relations include the ship attempting to overtake another ship, the other ship agrees or suspects overtaking, and sailboats and ships less than 20 m in length should not interfere with ships that can only navigate safely in narrow channels. Vessels engaged in fishing shall not hinder any ships that navigate safely in narrow channels, etc.
5.2. Formal Expression of Ship Behavior Based on Rule 9
5.3. Reasoning Based on the Proposed Method
- (a)
- The expression of the attribute elements of the ship A
- (b)
- The expression of the attribute elements of the ship B
- (c)
- The expression of the relational elements between ship A and ship B
- (d)
- The expression of the relational elements between ship A and Narrow channel
- (e)
- The expression of the relational elements between ship B and Narrow channel
- (f)
- The expression of the attribute behavior of ship A
- (g)
- The expression of the attribute behavior of ship B
- (h)
- The expression of the relational behavior of ship A and ship B
- (i)
- The expression of the relational behavior of ship A and Narrow channel
- (j)
- The expression of the relational behavior of ship B and Narrow channel
6. Discussion
6.1. Discussion on Case Study
6.2. Advantages and Disadvantages of the Proposed Method
- (1)
- Advantages of this method
- (2)
- Disadvantages of this method
6.3. Future Work
- (1)
- Constructing the ontology of ship behavior
- (2)
- Constructing the ontology of traffic scene
- (3)
- Constructing the knowledge graph of ship behavior
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rule 9 Narrow Channel |
| (a) A vessel proceeding along the course of a narrow channel or fairway shall keep as near to the outer limit of the channel or fairway which lies on her starboard side as is safe and practicable. |
| (b) A vessel of less than 20 m in length or a sailing vessel shall not impede the passage of a vessel which can safely navigate only within a narrow channel or fairway. |
| (c) A vessel engaged in fishing shall not impede the passage of any other vessel navigating within a narrow channel or fairway. |
| (d) A vessel shall not cross a narrow channel or fairway if such crossing impedes the passage of a vessel which can safely navigate only within such channel or fairway. The latter vessel may use the sound signal prescribed in Rule 34(d) if in doubt as to the intention of the crossing vessel. |
(e)
|
| (f) A vessel nearing a bend or an area of a narrow channel or fairway where other vessels may be obscured by an intervening obstruction shall navigate with particular alertness and caution and shall sound the appropriate signal prescribed in Rule 34(e). |
| (g) Any vessel shall, if the circumstances of the case admit, avoid anchoring in a narrow channel. |
References
- Sui, Z.; Wen, Y.; Huang, Y.; Zhou, C.; Xiao, C.; Chen, H. Empirical analysis of complex network for marine traffic situation. Ocean Eng. 2020, 214, 107848. [Google Scholar] [CrossRef]
- Zhou, Y.; Daamen, W.; Vellinga, T.; Hoogendoorn, S.P. Impacts of wind and current on ship behavior in ports and waterways: A quantitative analysis based on AIS data. Ocean Eng. 2020, 213, 107774. [Google Scholar] [CrossRef]
- Zhou, Y.; Daamen, W.; Vellinga, T.; Hoogendoorn, S.P. Ship classification based on ship behavior clustering from AIS data. Ocean Eng. 2019, 175, 176–187. [Google Scholar] [CrossRef]
- Pallotta, G.; Vespe, M.; Bryan, K. Vessel pattern knowledge discovery from AIS data: A framework for anomaly detection and route prediction. Entropy 2013, 15, 2218–2245. [Google Scholar] [CrossRef] [Green Version]
- Zhu, F.; Zhang, Y. Research on Marine Traffic Data Mining System Based on AIS. Energy Procedia 2011, 13, 8254–8259. [Google Scholar]
- Zhu, F. Mining ship spatial trajectory patterns from AIS database for maritime surveillance. In Proceedings of the 2nd IEEE International Conference on Emergency Management and Management Sciences (ICEMMS), Beijing, China, 8–10 August 2011; pp. 772–775. [Google Scholar]
- Gao, M.; Shi, G.; Li, S. Online prediction of ship behavior with automatic identification system sensor data using bidirectional long short-term memory recurrent neural network. Sensors 2018, 18, 4211. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sun, Y.; Peng, X.; Ding, Z.; Zhao, J. An approach to ship behavior prediction based on AIS and RNN optimization model. Int. J. Transp. Eng. Technol 2020, 6, 16–21. [Google Scholar]
- Mascaro, S.; Korb, K.B.; Nicholson, A.E. Learning abnormal vessel behaviour from ais data with bayesian networks at two time scales. Tracks A J. Artist. Writ. 2010, 4, 1–34. [Google Scholar]
- Xu, T.; Liu, X.; Yang, X. Ship Trajectory online prediction based on BP neural network algorithm. In Proceedings of the 2011 International Conference of Information Technology, Computer Engineering and Management Sciences, Nanjing, China, 24–25 September 2011; pp. 103–106. [Google Scholar]
- Patroumpas, K.; Alevizos, E.; Artikis, A.; Vodas, M.; Pelekis, N.; Theodoridis, Y. Online event recognition from moving vessel trajectories. GeoInformatica 2017, 21, 389–427. [Google Scholar] [CrossRef]
- Zouaoui-Elloumi, S.; Maïzi, N. Securing harbor by combining probabilistic approach with event-based approach. Appl. Ocean Res. 2014, 47, 98–109. [Google Scholar] [CrossRef] [Green Version]
- Lei, P.-R. A framework for anomaly detection in maritime trajectory behavior. Knowl. Inf. Syst. 2016, 47, 189–214. [Google Scholar] [CrossRef]
- Zissis, D.; Xidias, E.K.; Lekkas, D. Real-time vessel behavior prediction. Evol. Syst. 2016, 7, 29–40. [Google Scholar] [CrossRef]
- Perera, L.P.; Oliveira, P.; Soares, C.G. Maritime traffic monitoring based on vessel detection, tracking, state estimation, and trajectory prediction. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1188–1200. [Google Scholar] [CrossRef]
- Cowan, R. Expert systems: Aspects of and limitations to the codifiability of knowledge. Res. Policy 2001, 30, 1355–1372. [Google Scholar] [CrossRef] [Green Version]
- Sarker, K.U.; Deraman, A.B.; Hasan, R. Descriptive Logic for Software Engineering Ontology: Aspect Software Quality Control. In Proceedings of the 2018 4th International Conference on Computer and Information Sciences (ICCOINS), Kuala Lumpur, Malaysia, 13–14 August 2018; pp. 1–5. [Google Scholar]
- Mullen, J.; Cockell, S.J.; Tipney, H.; Woollard, P.M.; Wipat, A. Mining integrated semantic networks for drug repositioning opportunities. PeerJ 2016, 4, e1558. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fan, T.; Yan, L.; Ma, Z. Mapping fuzzy RDF(S) into fuzzy object-oriented databases. Int. J. Intell. Syst. 2019, 34, 751–780. [Google Scholar] [CrossRef]
- Smith, B. Ontology. In The Furniture of the World; Brill: Leiden, The Netherlands, 2012; pp. 47–68. [Google Scholar]
- Zhang, Z.; Suo, Y.; Yang, S.; Zhao, Z. Detection of Complex Abnormal Ship Behavior Based on Event Stream. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 5730–5735. [Google Scholar]
- Yan, Z.; Chakraborty, D.; Parent, C.; Spaccapietra, S.; Aberer, K. Semantic trajectories: Mobility data computation and annotation. ACM Trans. Intell. Syst. Technol. 2013, 4, 1–38. [Google Scholar] [CrossRef]
- Nogueira, T.P.; Braga, R.B.; Martin, H. An ontology-based approach to represent trajectory characteristics. In Proceedings of the 2014 Fifth International Conference on Computing for Geospatial Research and Application, Washington, DC, USA, 4–6 August 2014; pp. 102–107. [Google Scholar]
- Lamprecht, D.; Strohmaier, M.; Helic, D.; Nyulas, C.; Tudorache, T.; Noy, N.; Musen, M.A. Using ontologies to model human navigation behavior in information networks: A study based on wikipedia. Semant. Web 2015, 6, 403–422. [Google Scholar] [CrossRef] [Green Version]
- Wen, Y.; Zhang, Y.; Huang, L.; Zhou, C.; Xiao, C.; Zhang, F.; Peng, X.; Zhan, W.; Sui, Z. Semantic modelling of ship behavior in harbor based on ontology and dynamic bayesian network. ISPRS Int. J. Geo-Inf. 2019, 8, 107. [Google Scholar] [CrossRef] [Green Version]
- Huang, L.; Wen, Y.; Guo, W.; Zhu, X.; Zhou, C.; Zhang, F.; Zhu, M. Mobility pattern analysis of ship trajectories based on semantic transformation and topic model. Ocean Eng. 2020, 201, 107092. [Google Scholar] [CrossRef]
- Adibi, P.; Pranovi, F.; Raffaetà, A.; Russo, E.; Silvestri, C.; Simeoni, M.; Soares, A.; Matwin, S. Predicting fishing effort and catch using semantic trajectories and machine learning. In Proceedings of the International Workshop on Multiple-Aspect Analysis of Semantic Trajectories, Würzburg, Germany, 16 September 2019; Springer: Cham, Switzerland, 2019; pp. 83–99. [Google Scholar]
- Kose, K.; Yang, C.; Ishioka, Y.; Kato, Y.; Nagasawa, A.; Hara, K. A collision avoidance expert system for integrated navigation system and its brush-up. J. Soc. Nav. Archit. Jpn. 1995, 1995, 399–407. [Google Scholar] [CrossRef]
- He, Y.; Jin, Y.; Huang, L.; Xiong, Y.; Chen, P.; Mou, J. Quantitative analysis of COLREG rules and seamanship for autonomous collision avoidance at open sea. Ocean Eng. 2017, 140, 281–291. [Google Scholar] [CrossRef]
- Hwang, C.N. The integrated design of fuzzy collision-avoidance and H∞-autopilots on ships. J. Navig. 2002, 55, 117–136. [Google Scholar] [CrossRef]
- Xu, X.; Lu, Y.; Liu, X.; Zhang, W. Intelligent collision avoidance algorithms for USVs via deep reinforcement learning under COLREGs. Ocean Eng. 2020, 217, 107704. [Google Scholar] [CrossRef]
- He, Y.; Huang, L.; Xiong, Y.; Hu, W. The Research of Ship ACA Actions at Different Stages on Head-On Situation Based on CRI and COLREGS. J. Coast. Res. 2015, 73, 735–740. [Google Scholar] [CrossRef]
- Eriksen, B.-O.H.; Bitar, G.; Breivik, M.; Lekkas, A. Hybrid Collision Avoidance for ASVs Compliant With COLREGs Rules 8 and 13–17. Front. Robot. AI 2020, 7, 11. [Google Scholar] [CrossRef]
- Weng, J.; Liu, M.; Zhou, Y. Watch and Collision Avoidance of Ship; Wuhan University of Technology Press: Wuhan, China, 2021. (In Chinese) [Google Scholar]
- Hoang, V.-N.; Nguyen-Xuan, H. Extruded-geometric-component-based 3D topology optimization. Comput. Methods Appl. Mech. Eng. 2020, 371, 113293. [Google Scholar] [CrossRef]
- He, Z.; Deng, M.; Cai, J.; Xie, Z.; Guan, Q.; Yang, C. Mining spatiotemporal association patterns from complex geographic phenomena. Int. J. Geogr. Inf. Sci. 2020, 34, 1162–1187. [Google Scholar] [CrossRef]



| Time Relation Elements | Expression | Illustration |
|---|---|---|
| earlier than |  | |
| later than |  | |
| between |  | |
| beginning at |  | |
| ending at |  |
| Domain | Relation | Range | Expression |
|---|---|---|---|
| One ship object | hasType | attribute elements | The type of ship |
| hasName | attribute elements | The name of a ship | |
| hasVelocity | attribute elements | The velocity of a ship | |
| hasCourse | attribute elements | The course of a ship | |
| hasSize | attribute elements | The size of a ship | |
| Two ship objects | hasRelative distance | relational elements | The relative distance |
| hasRelative bearing | relational elements | The relative bearing |
| Elements Type | Valueti-Valueti−1 | Behavior Type | ||
|---|---|---|---|---|
| Attribute elements | velocity | >0 | accelerate | Attribute behavior |
| =0 | keep velocity | |||
| <0 | decelerate | |||
| course | >0 | turn port | ||
| =0 | keep course | |||
| <0 | turn starboard | |||
| Relational elements | relative distance | >0 | far away | Relational behavior |
| =0 | keep distance | |||
| <0 | near | |||
| relative bearing | >0 | move to stern | ||
| =0 | keep bearing | |||
| <0 | move to bow | |||
| topology (Rout = −1, Rin = 1) | >0 | sailing in | ||
| =0 | keep topology | |||
| <0 | sailing out | |||
| Object | Meaning | Object | Meaning |
|---|---|---|---|
| Ship | A set of ships | Shipin | A set of ships in the narrow channel |
| NC | Narrow channel | A set of ships which length less than 20 m | |
| Shipsailing | Sailboat | Shipfishing | Engaged in fishing boats |
| Object | Attribute Elements (Object.parameterAttribute) | Meaning | |
|---|---|---|---|
| Ship | Static attribute | (Name_Ship,h,ti) | “Ship’s name is “h” at ti” |
| (MMSI,i,ti) | “Ship call sign is “i” at ti” | ||
| (Size,j,ti) | “The value of ship size is “j” at ti” | ||
| (Type_ship,k,ti) | “The value of ship type is “k” at ti” | ||
| Dynamic attribute | (Location,a,ti) | “Ship’s location is “a” at ti” | |
| (Velocity,b,ti) | “Ship’s velocity is “b” at ti” | ||
| (Course,c,ti) | “Ship’s course is “c” at ti” | ||
| (Draft,d,ti) | “Ship’s draft is “d” at ti” | ||
| (Sound,e,ti) | “Ship’s sound is “e” at ti” | ||
| Narrow Channel (NC) | Static attribute | (Name_NC,l,ti) | “The value of Narrow channel name is “l” at ti” |
| (Boundry_NC,m,ti) | “The value of boundary position of the narrow channel is “m” at ti” | ||
| (Width_NC,n,ti) | “The value of navigable water width of the narrow channel is “n” at ti” | ||
| (Location_NC,o,ti) | “The value of the center position of each water depth area of the narrow channel is “o” at ti” | ||
| Dynamic attribute | (Visibility,f,ti) | “Visibility in narrow channel is “f” at ti” | |
| (Flow velocity,g,ti) | “Flow velocity in narrow channel is “g” at ti” | ||
| Objects | Relational Elements (Object.parameterRelation) | Meaning | |
|---|---|---|---|
| [Ship, NC] | Time relational | (Time.Before,1,ti) | “Before the ship enters the narrow channel” |
| (Time.After,−1,ti) | “After the ship enters the narrow channel” | ||
| (Time.Between,2, [ti,ti+1]) | “The time period during which the ship is sailing in the narrow channel” | ||
| Spatial topological relation | (Topology.Separation,−1,ti) | “The ship is outside the narrow channel” | |
| (Topology.Inclusion,1,ti) | “The ship is in the narrow channel” | ||
| (Topology.Inclusion_starboard,12,ti) | “The ship is in the narrow channel on its starboard side” | ||
| (Topology.Inclusion_elbow,13,ti) | “The ship is driving in the waters of the elbow of the narrow channel” | ||
| Semantic relation | (Semantic.Avoid_anchoring,1,ti) | “Ships avoid anchoring in the narrow channel” | |
| (Semantic.Avoid_crossring,1,ti) | “Ships avoid crossing narrow channel” | ||
| [ShipA, ShipB] | Spatial relation | (Relative bearing,a,ti) | “The bearing relation between ship A and ship B” |
| (Relative distance,b,ti) | “The distance relation between ship A and ship B” | ||
| Semantic relation | (Semantic.Overtaking_Port,1,ti) | “Ship A attempts to overtake the port side of Ship B” | |
| (Semantic.Overtaking_Starboard,2,ti) | “Ship A attempts to overtake from the starboard side of Ship B” | ||
| (Semantic.Agree_Overtaking,3,ti) | “Ship B agrees to ship A overtaking” | ||
| [Shipsailing, Shipin] | Semantic relation | (Semantic.Avoid_impede,1,ti) | “Sailing boats should not impede ships that can only navigate safely in the narrow channel” |
| , Shipin] | (Semantic.Avoid_impede,1,ti) | “Ships less than 20 m in length should not impede ships that can only navigate safely in narrow channels” | |
| [Shipfishing, Shipin] | (Semantic.Avoid_impede,1,ti) | “Vessels engaged in fishing shall not impede any vessel navigating safely in the narrow channel” | |
| Object | Attribute Elements (Object.ParameterAttribute) | Attribute Behavior (Object.BehaviorAttribute) |
|---|---|---|
| Shipin | {(Location, a, ti),(Location, b, ti+1)}, a ≠ b | {dLocation, “move”, [ ti, ti+1]} |
| {(Velocity, n, ti),(Velocity, m, ti+1)}, m < n | {dVelocity, “decelerate”, [ ti, ti+1]} | |
| {(Velocity, n, ti),(Velocity, m, ti+1)}, m > n | {dVelocity, “accelerate”, [ ti, ti+1]} | |
| {(Course, c, ti),(Course, d, ti+1)}, c ≠ d | {dCourse, “turn course”, [ ti, ti+1]} |
| Objects | Relational Elements | Relation Behavior |
|---|---|---|
| [Ship, NC] | {(Topology,−1, ti), (Topology,1, ti+1) } | {dTopology, “sailing in”, [ ti, ti+1]} |
| {(Topology,1,ti), (Topology,−1,ti+1) } | {dTopology, “sailing out”, [ ti, ti+1]} | |
| {(Course_ship,a,ti), (Course_NC,a,ti), (Course_ship,a−90,ti+1), (Course_NC,a,ti+1)} | {dCourse,“crossing narrow channel”,[ ti, ti+1]} | |
| [ShipA, ShipB] | {(Bearing,M,ti), (Bearing,M,ti+1), (Distance,n,ti), (Distance,m,ti+1)}, | If n > m and {dBearing, “keep bearing”, [ti, ti+1]}∩{dDistance, “near”, [ti, ti+1]}, then {dSemantic, “Ship A overtaking Ship B”, [ti, ti+1]}. |
| Object | Time | Attribute Behavior | Relational Behavior | COLREGs-Compliant (Yes/No) |
|---|---|---|---|---|
| ship A | [t1,t2] | “accelerate” “keep course” | Yes | |
| [t2,t3] | “decelerate” “turn starboard” | No | ||
| ship B | [t1,t2] | “decelerate” “keep course” | Yes | |
| [t2,t3] | “keep velocity = 0” “keep course” | No | ||
| [ship A, ship B] | [t1,t2] | “near” “move to bow” | Yes | |
| [t2,t3] | “far away” “move to stern” | Yes | ||
| [ship A, ONC] | [t1,t2] | “sailing in” | Yes | |
| [t2,t3] | “keep topology = 1” | Yes | ||
| [ship B, ONC] | [t1,t2] | “keep topology = 1” | Yes | |
| [t2,t3] | “keep topology = 1” | Yes |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhong, S.; Wen, Y.; Huang, Y.; Cheng, X.; Huang, L. Ontological Ship Behavior Modeling Based on COLREGs for Knowledge Reasoning. J. Mar. Sci. Eng. 2022, 10, 203. https://doi.org/10.3390/jmse10020203
Zhong S, Wen Y, Huang Y, Cheng X, Huang L. Ontological Ship Behavior Modeling Based on COLREGs for Knowledge Reasoning. Journal of Marine Science and Engineering. 2022; 10(2):203. https://doi.org/10.3390/jmse10020203
Chicago/Turabian StyleZhong, Shubin, Yuanqiao Wen, Yamin Huang, Xiaodong Cheng, and Liang Huang. 2022. "Ontological Ship Behavior Modeling Based on COLREGs for Knowledge Reasoning" Journal of Marine Science and Engineering 10, no. 2: 203. https://doi.org/10.3390/jmse10020203
APA StyleZhong, S., Wen, Y., Huang, Y., Cheng, X., & Huang, L. (2022). Ontological Ship Behavior Modeling Based on COLREGs for Knowledge Reasoning. Journal of Marine Science and Engineering, 10(2), 203. https://doi.org/10.3390/jmse10020203