
An Energy-Saving Position Control Strategy for Deep-Sea Valve-Controlled Hydraulic Cylinder Systems


Abstract
:1. Introduction
2. Methodology
2.1. Fundamental Equations
2.1.1. Equations Related to the Hydraulic System
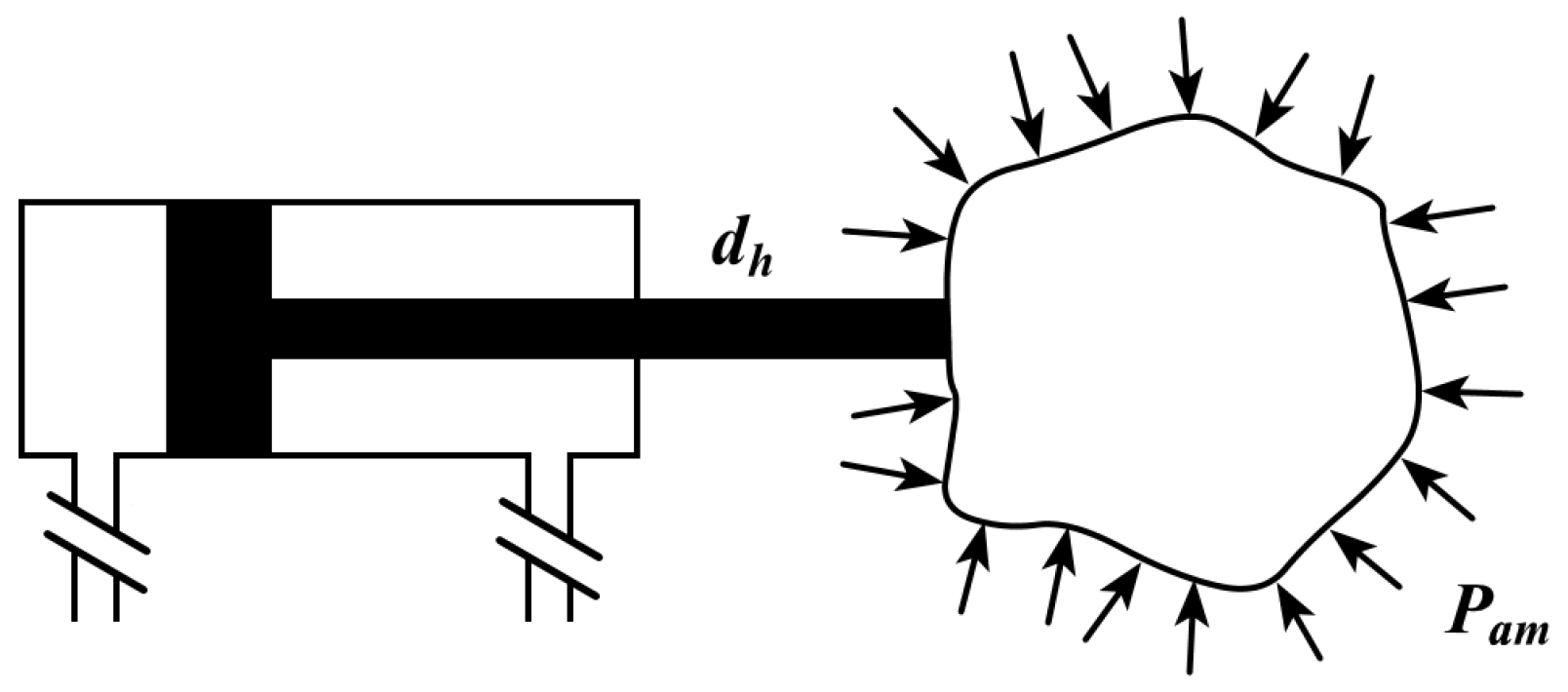
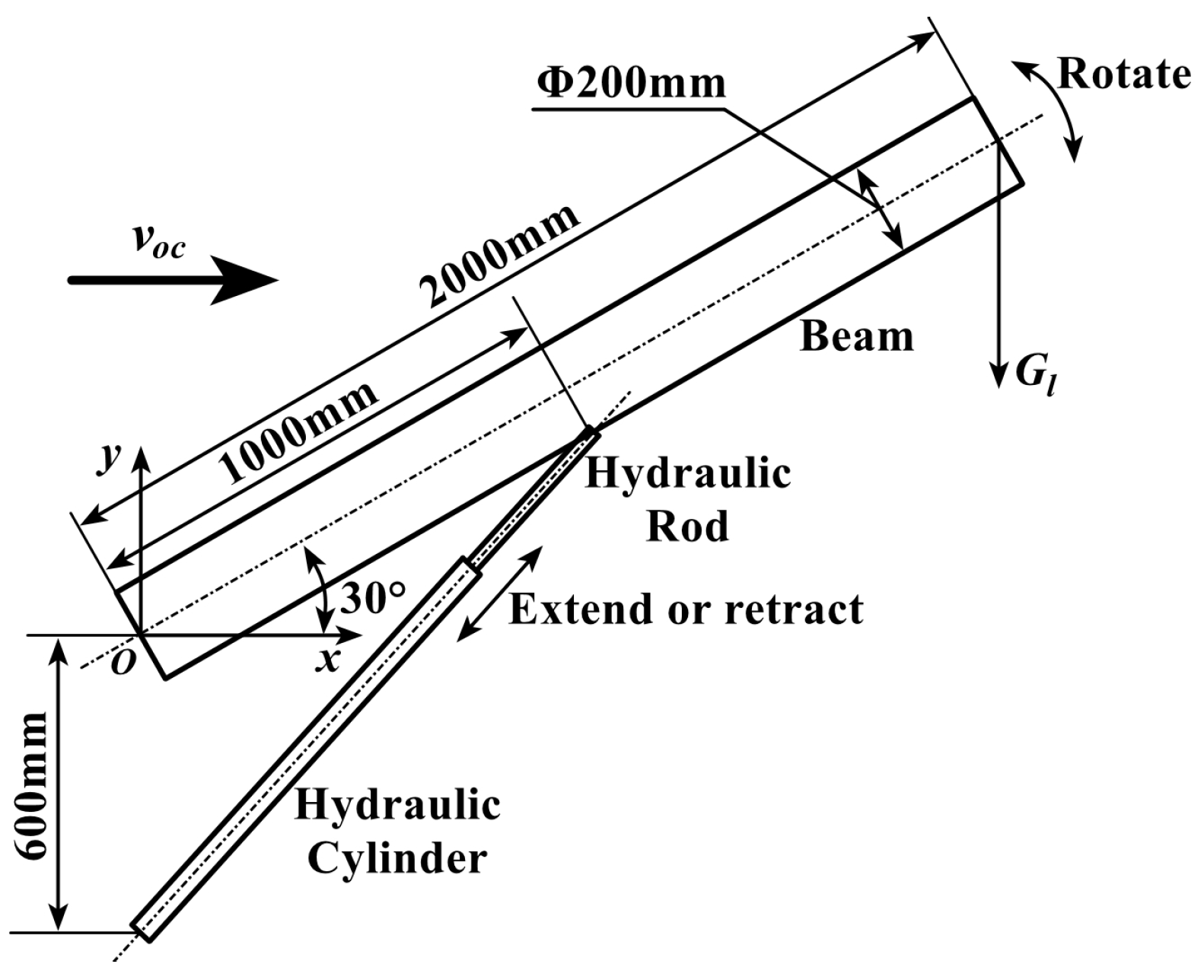
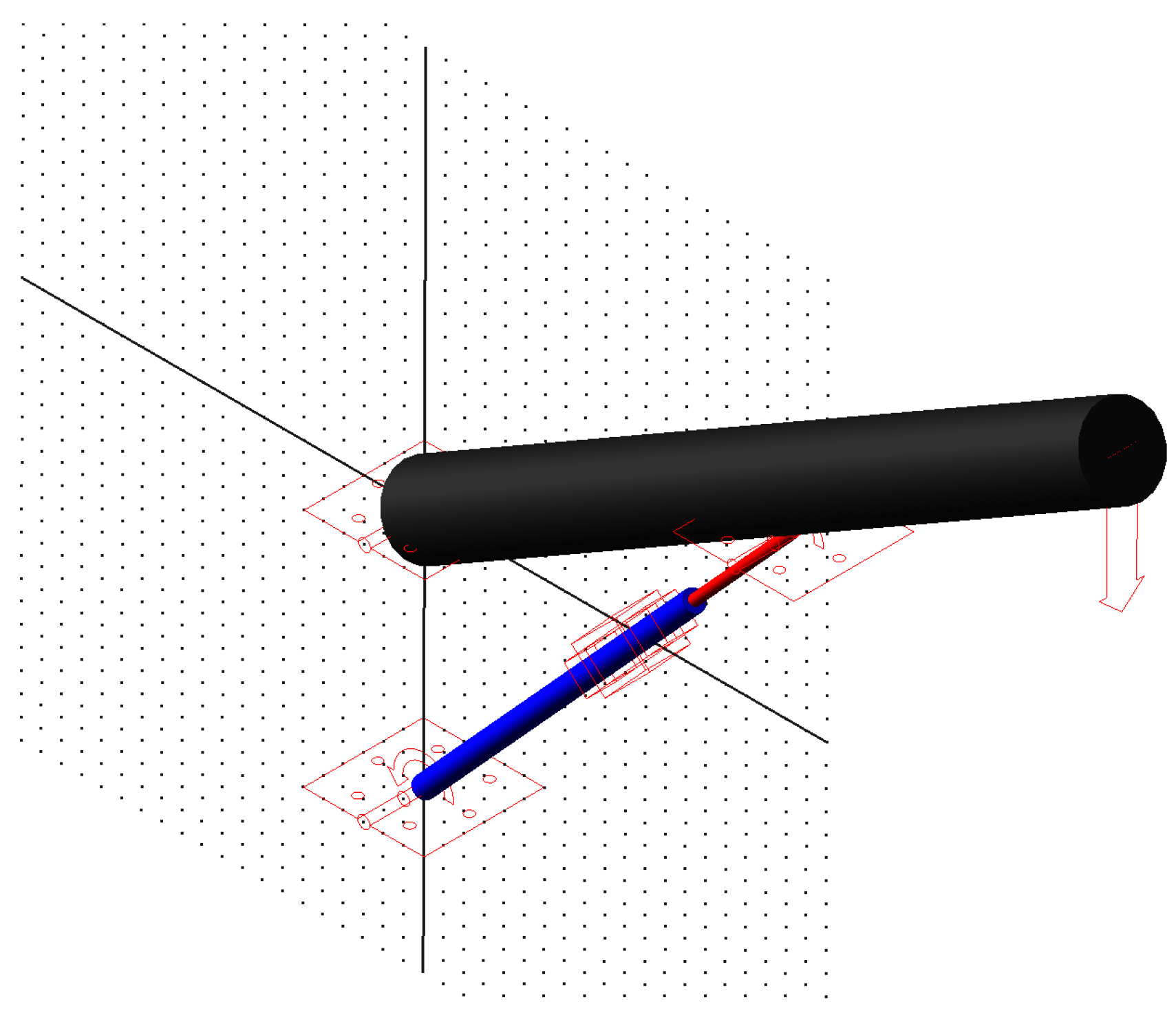
2.1.2. Equations Related to the Mechanical System
2.2. Control Strategy
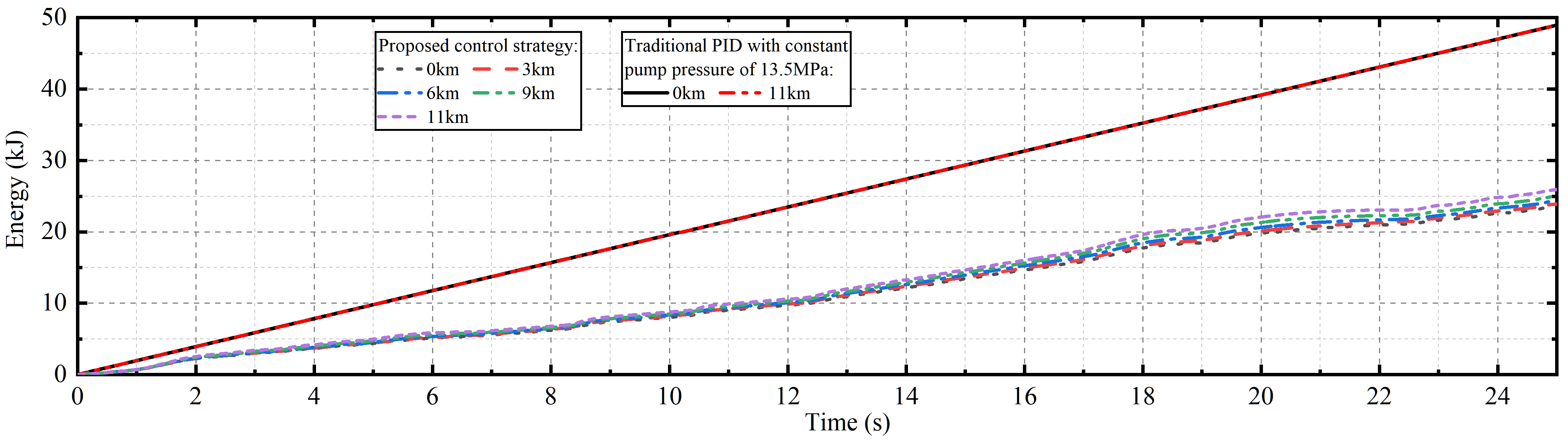
2.2.1. Energy-Saving Control
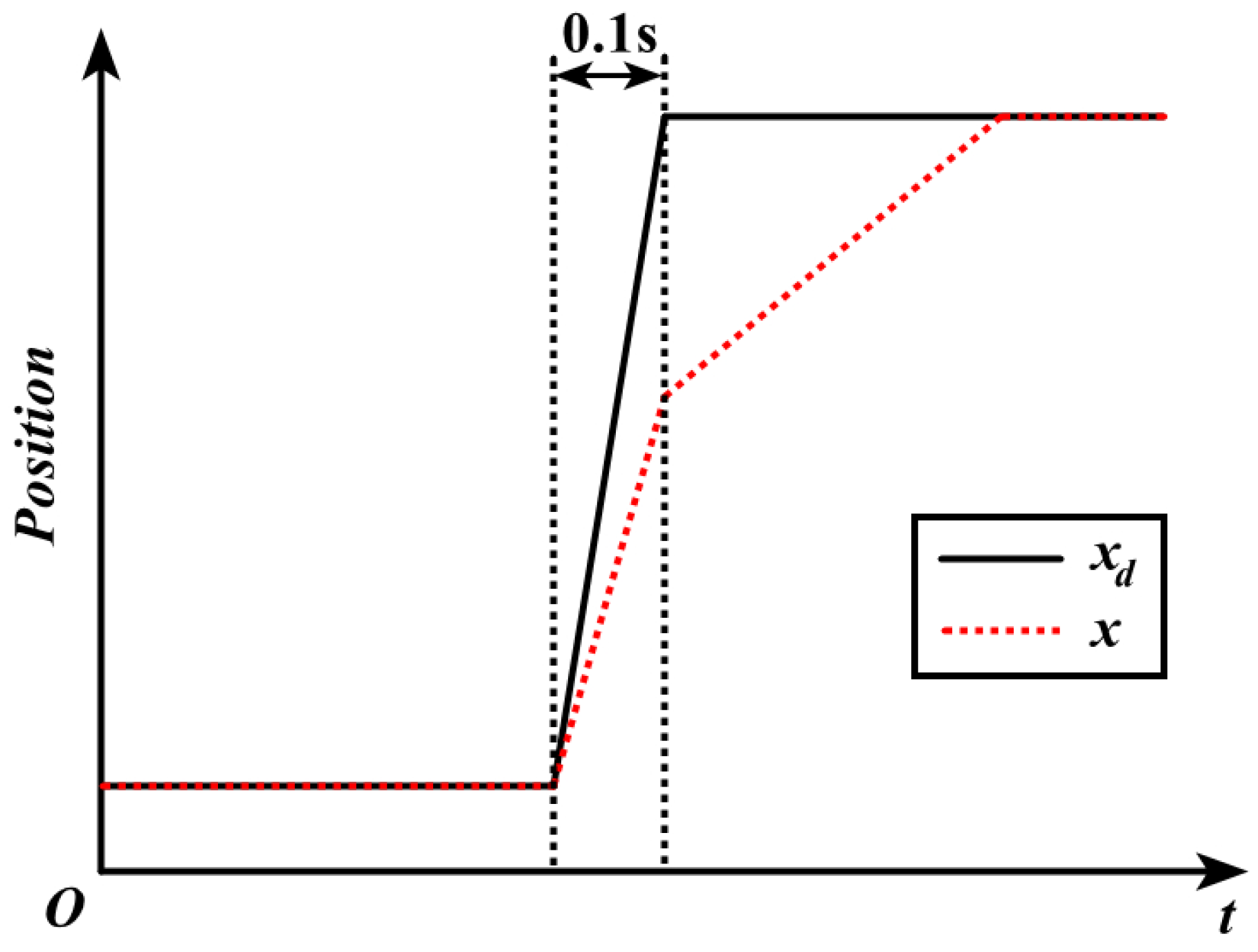
2.2.2. Position Control
3. Model
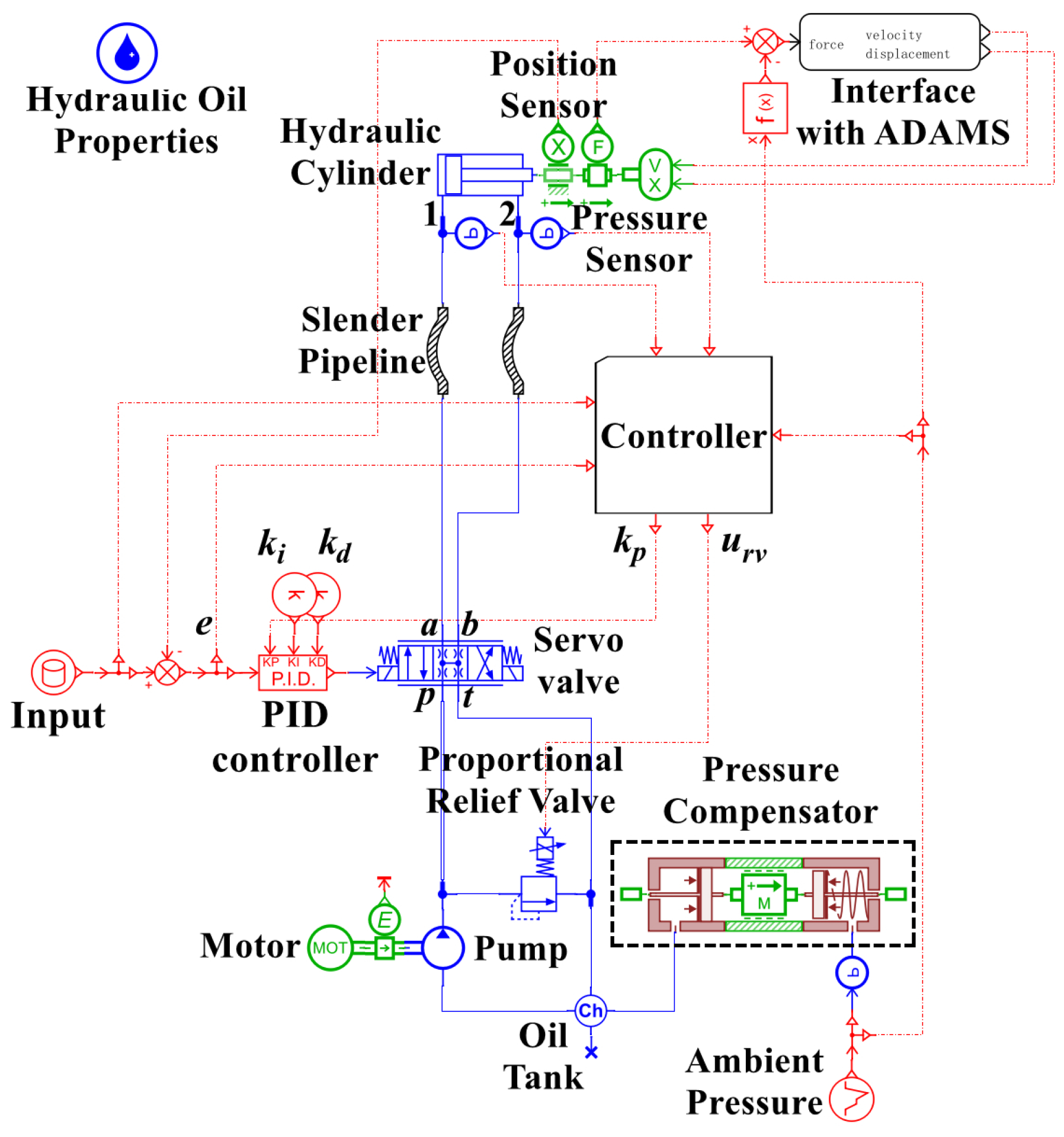
3.1. Model and Settings
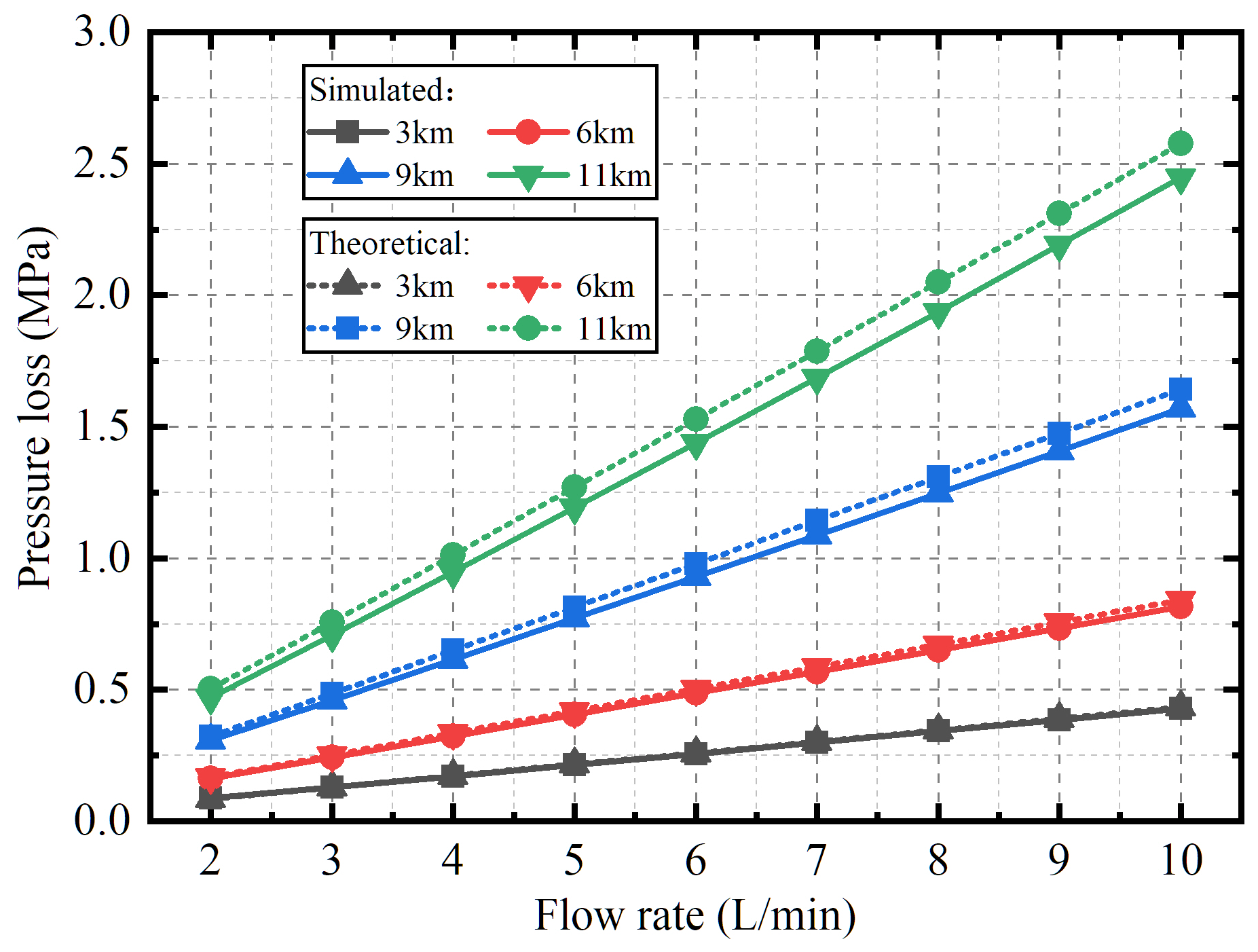
3.2. Validation of Pipeline Pressure Loss
4. Results and Discussions
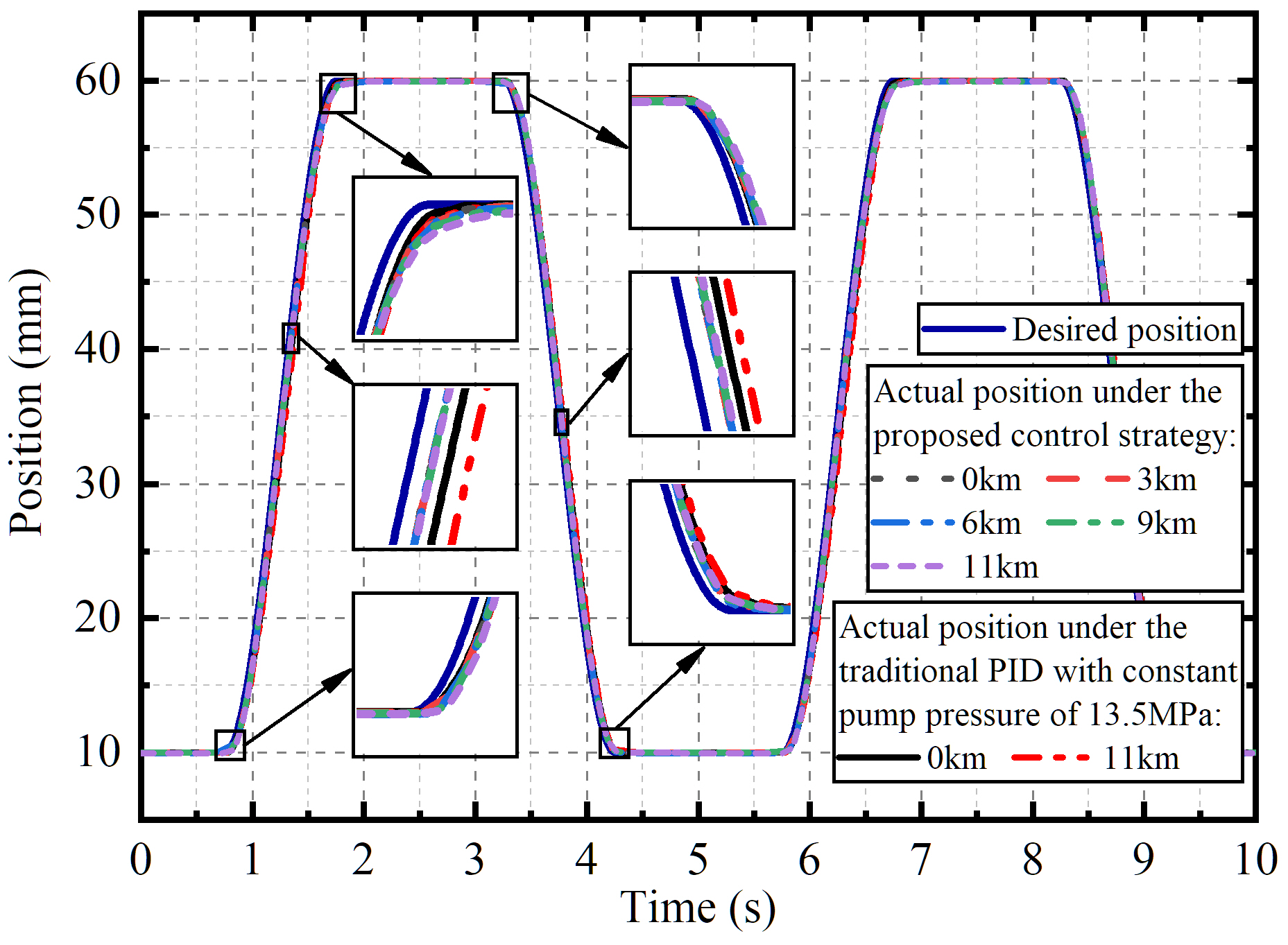
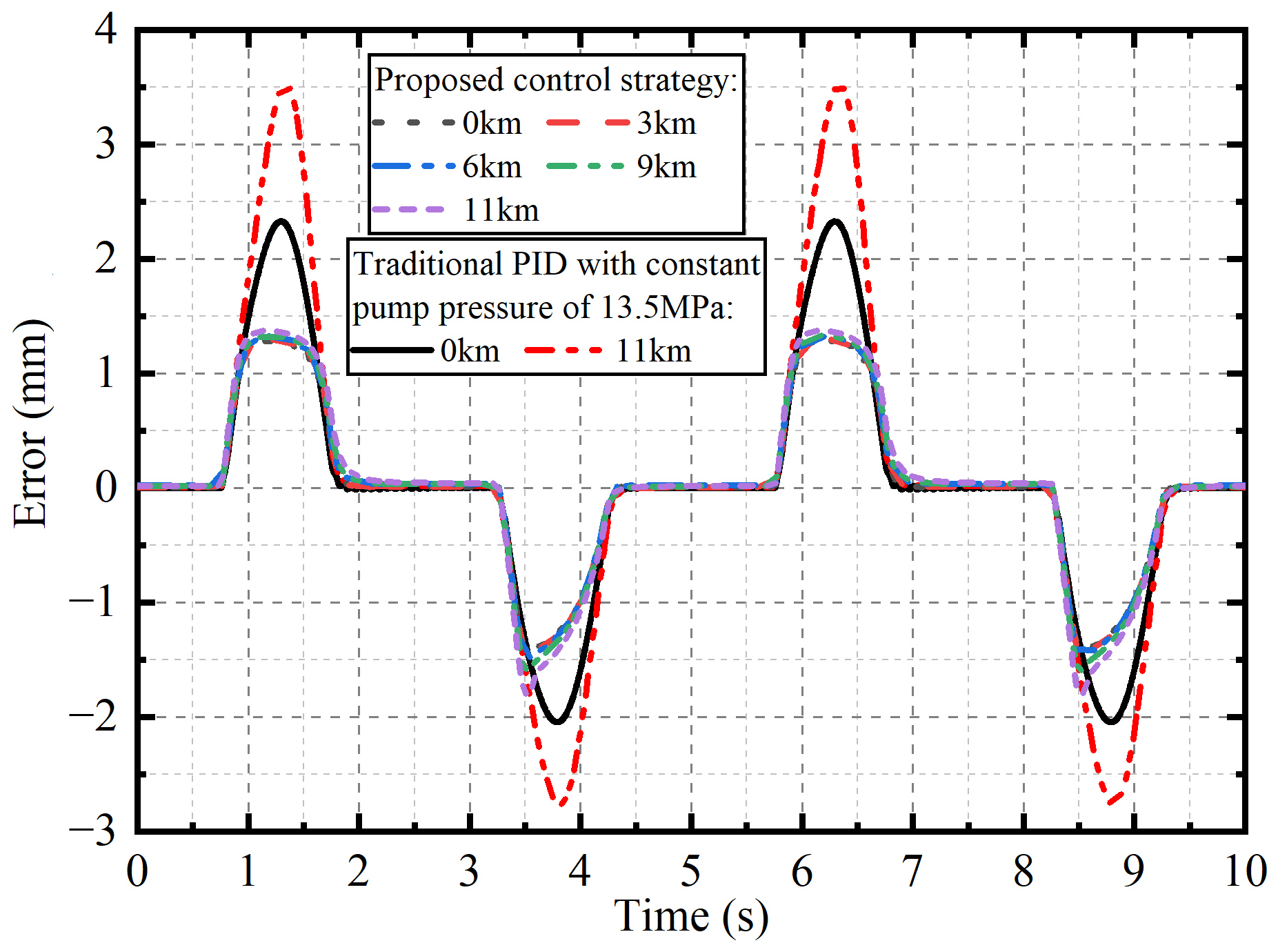
4.1. Multi-Step Movement
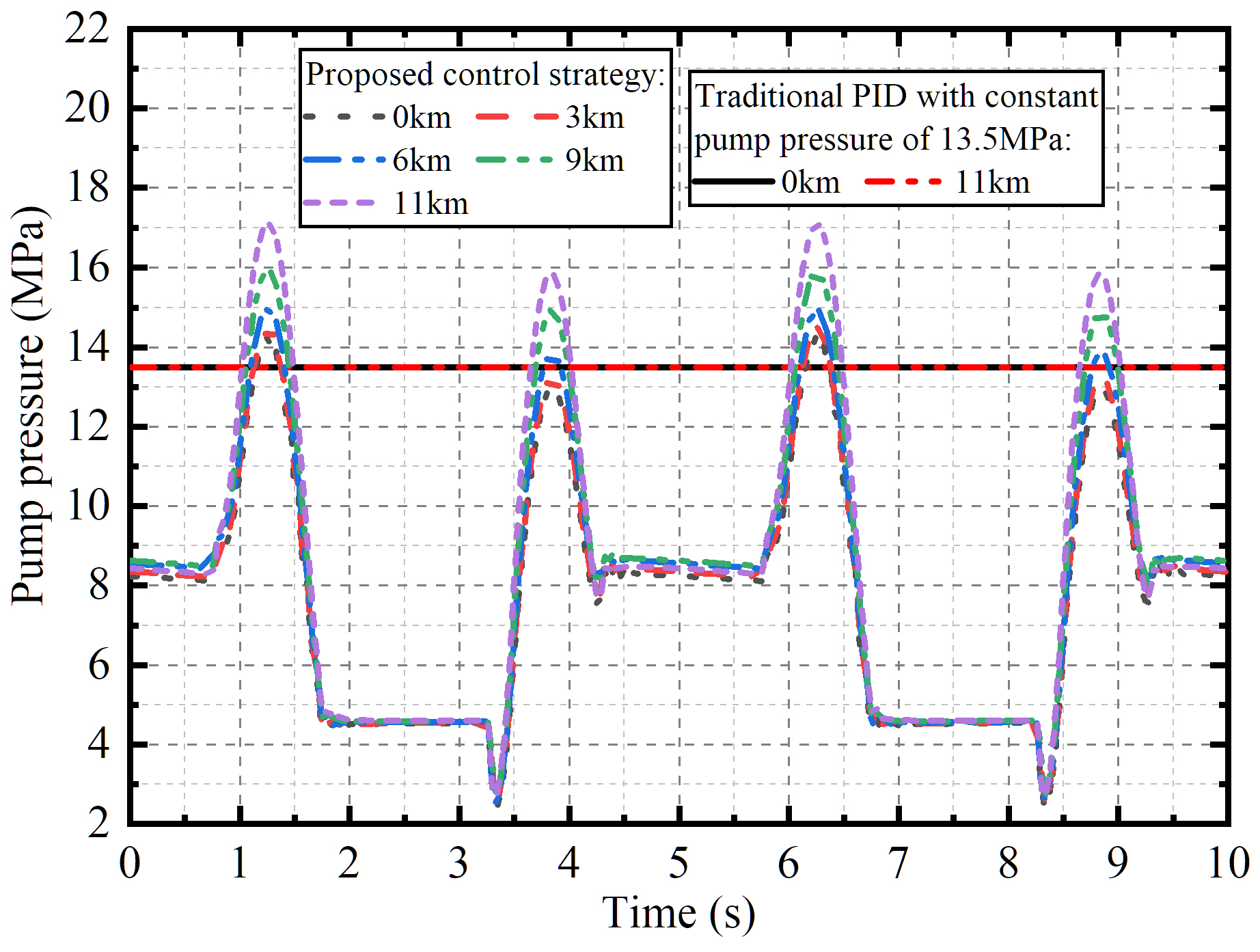
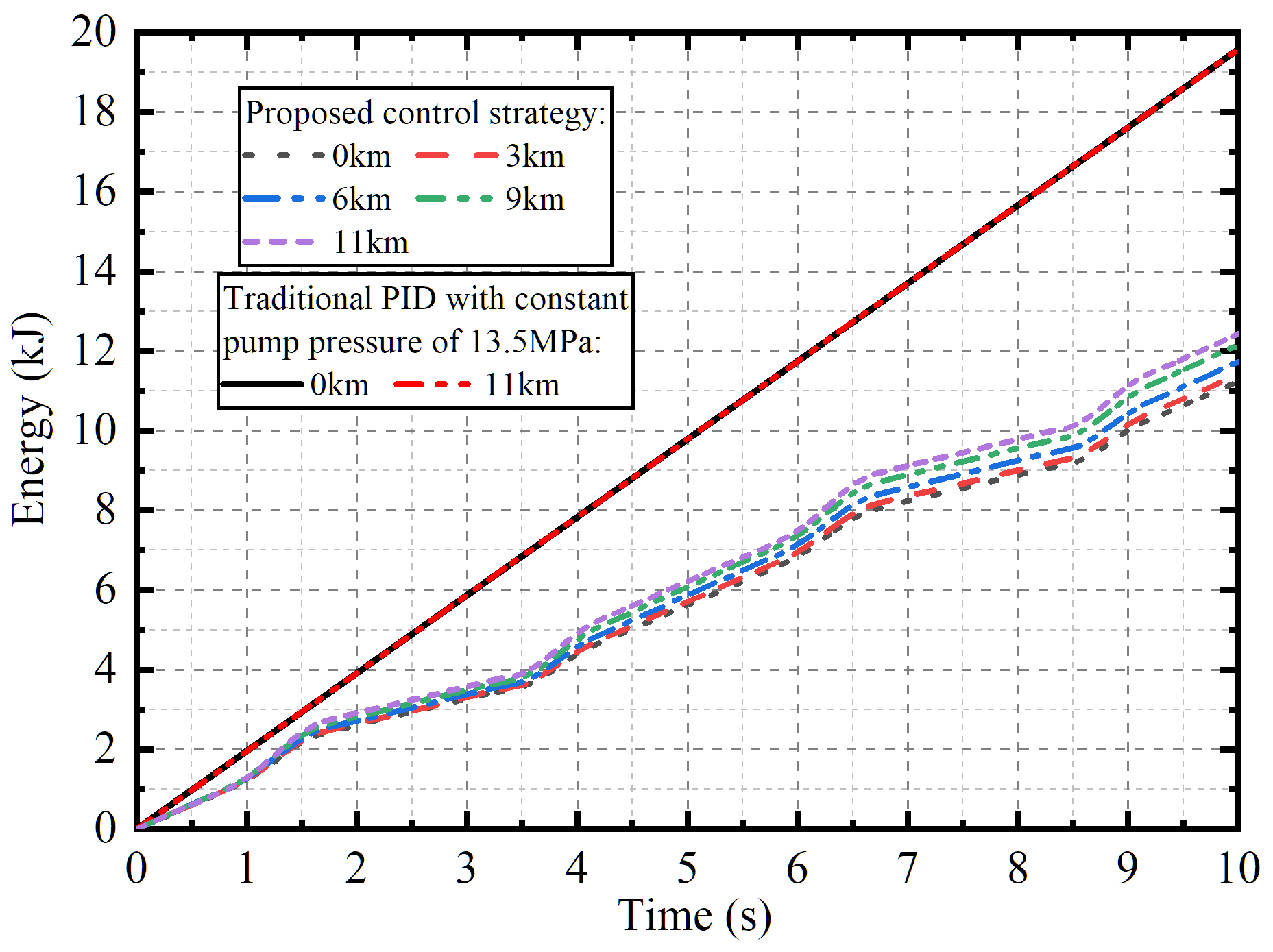
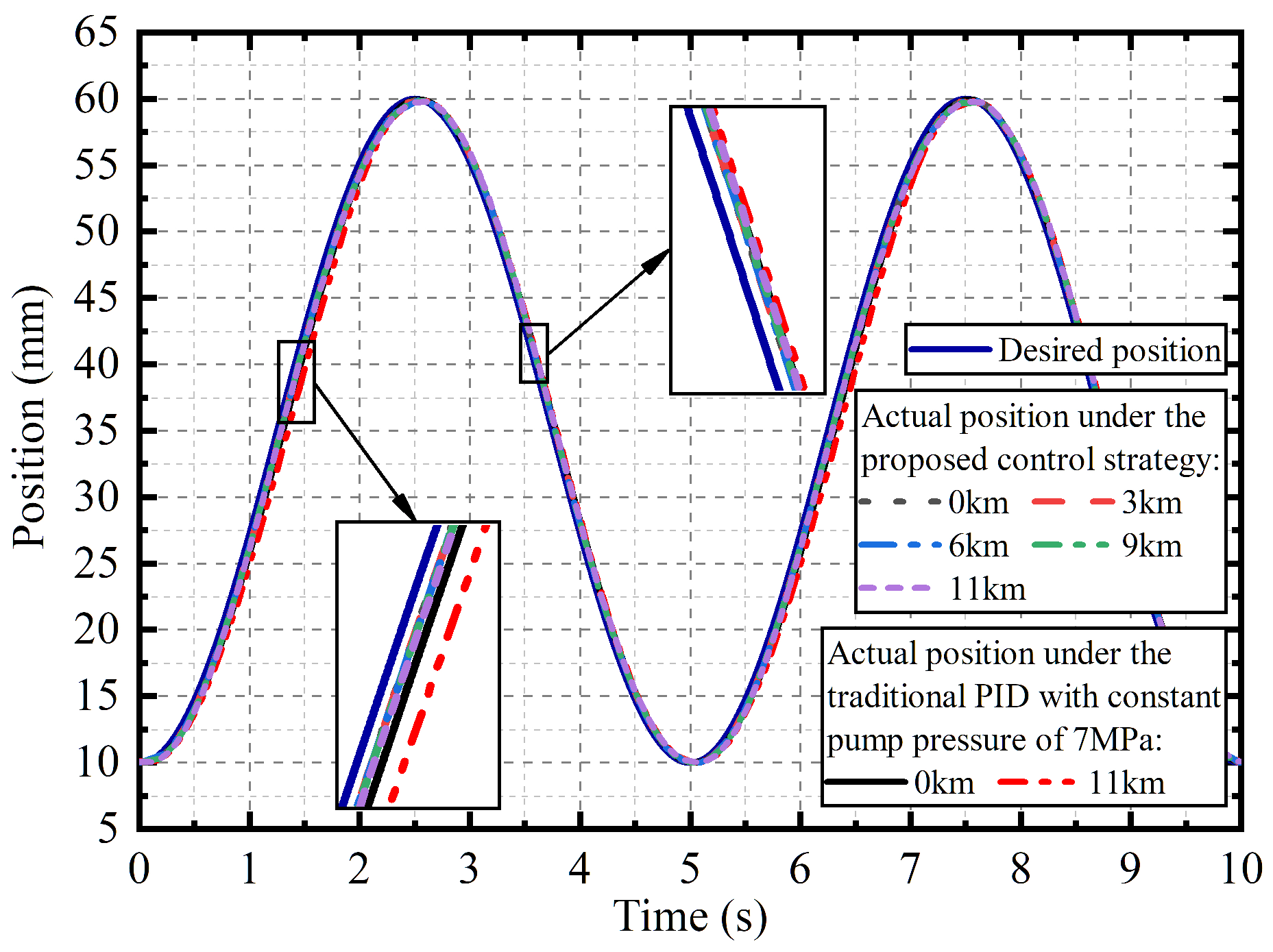
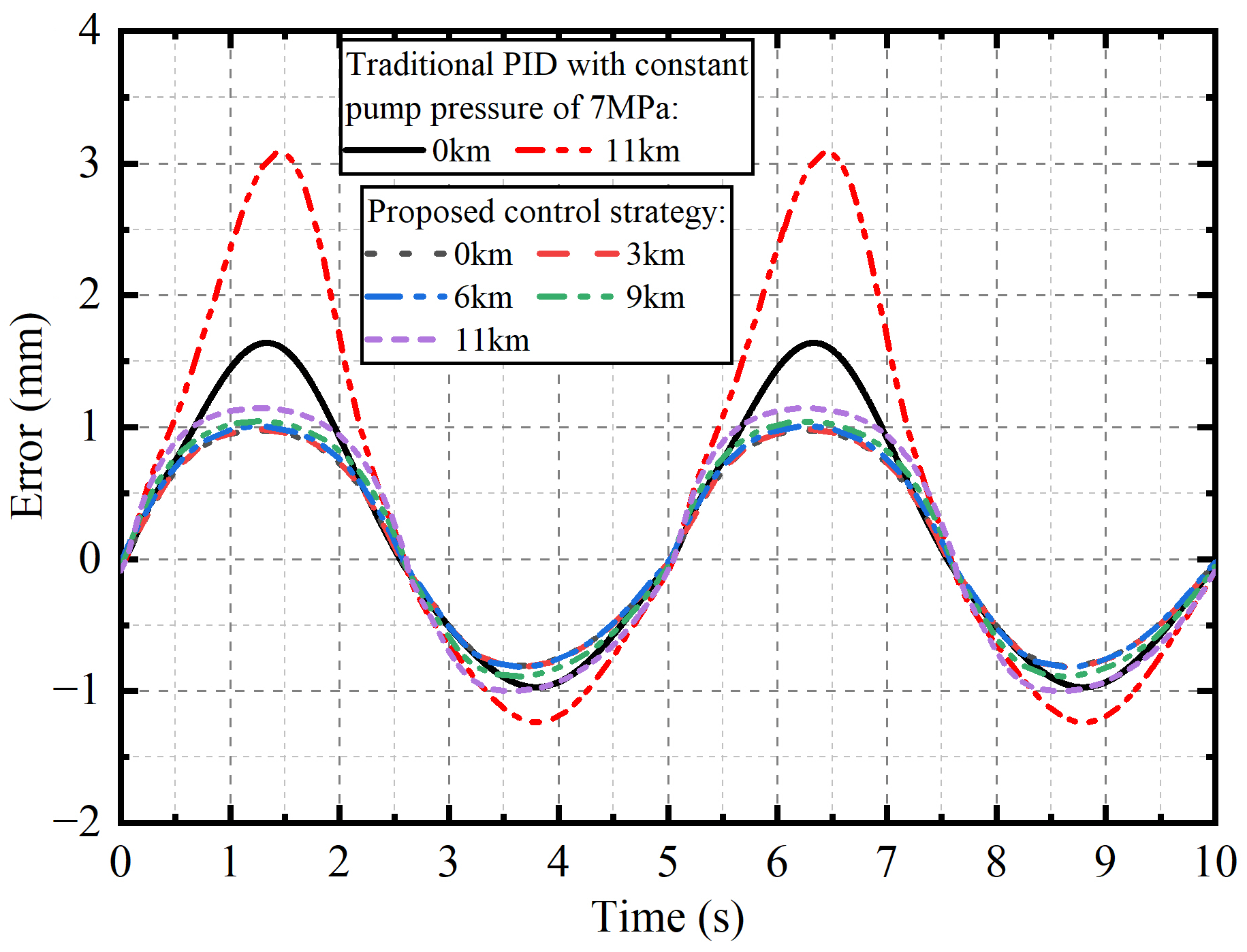
4.2. Harmonic Movement
4.3. Complex Movement
4.4. Other Performance
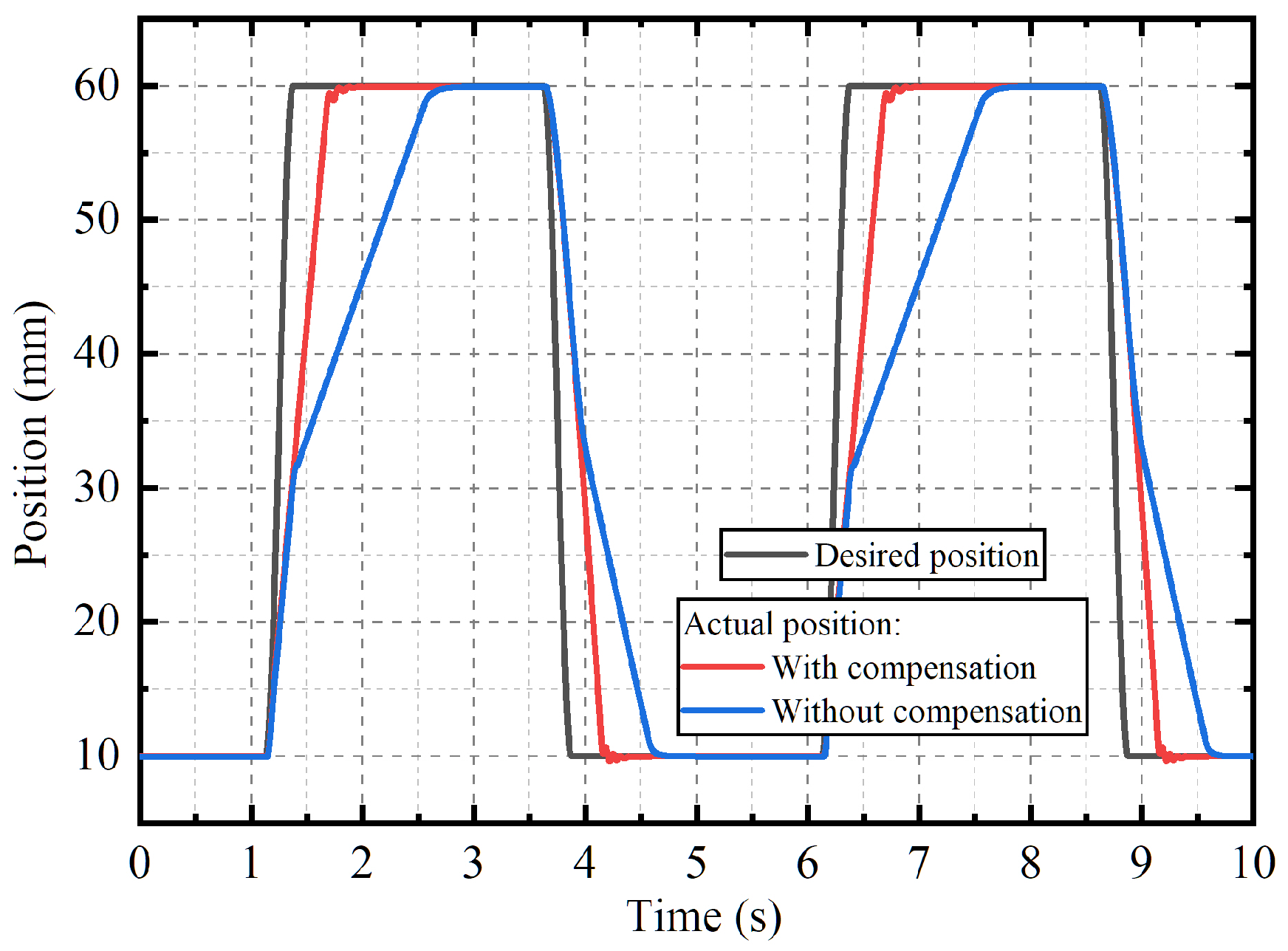
4.4.1. Error-Related Pump Pressure Compensation
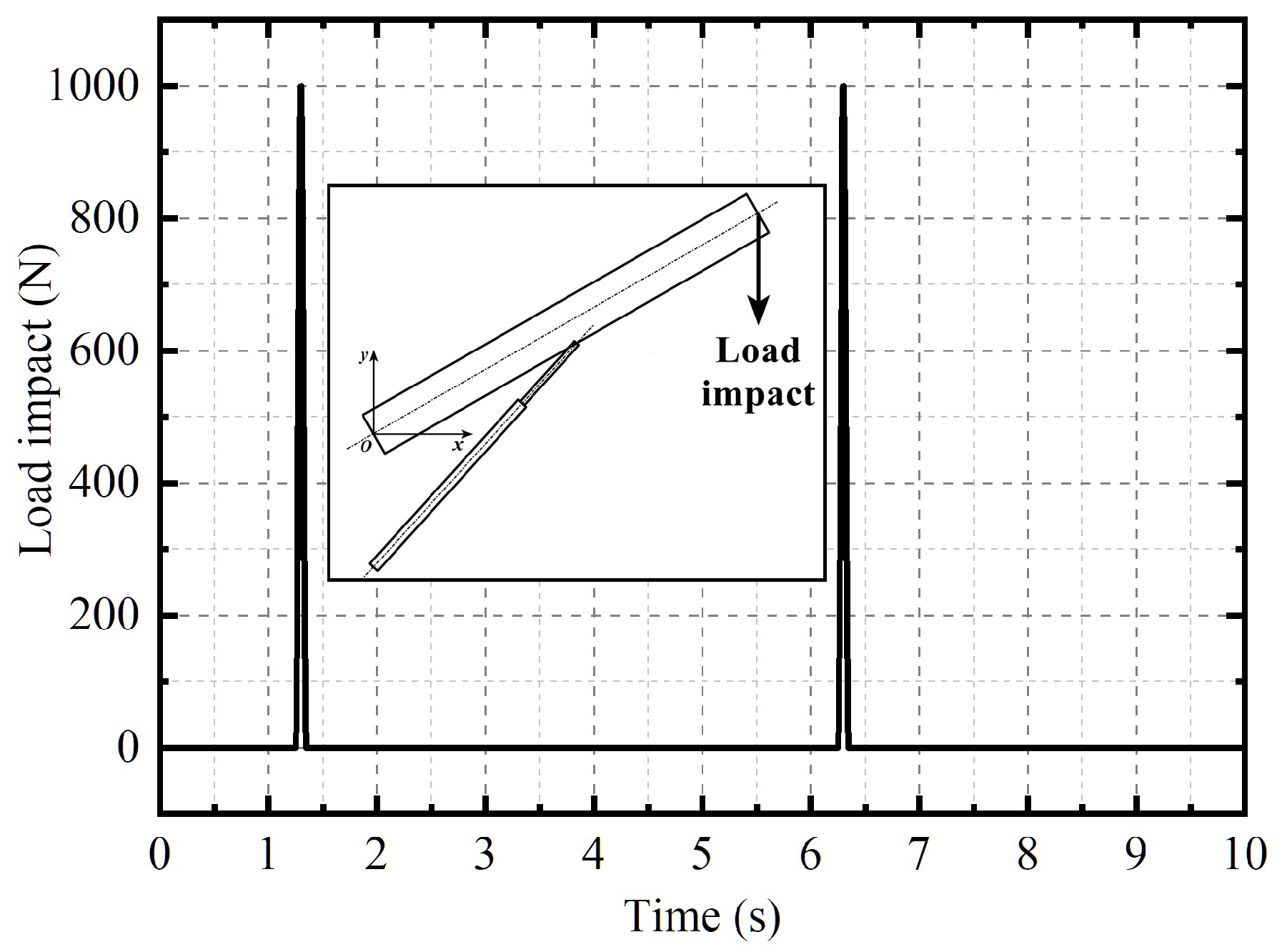
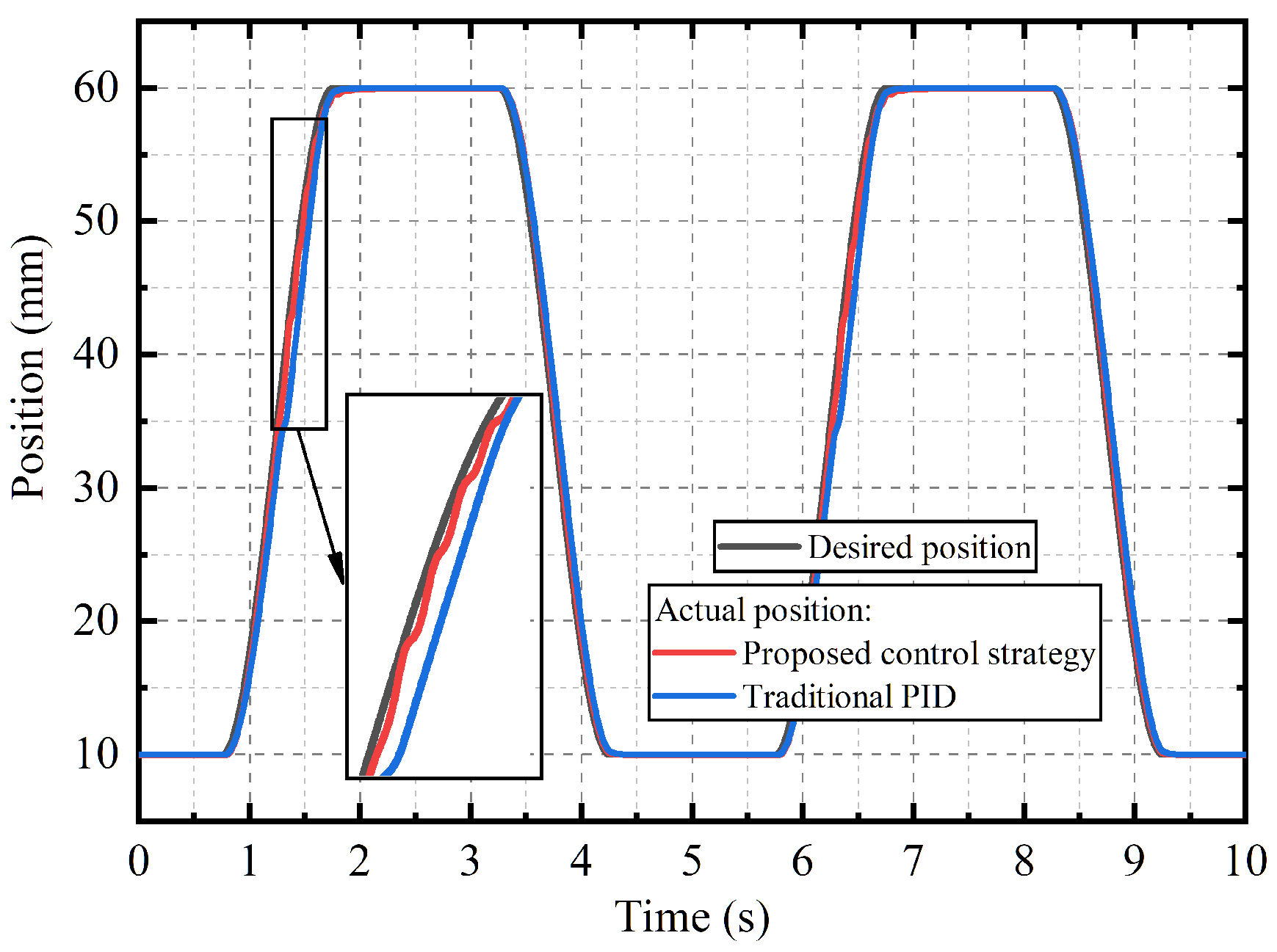
4.4.2. Tracking Performance under Load Impact
4.5. Parameter Study
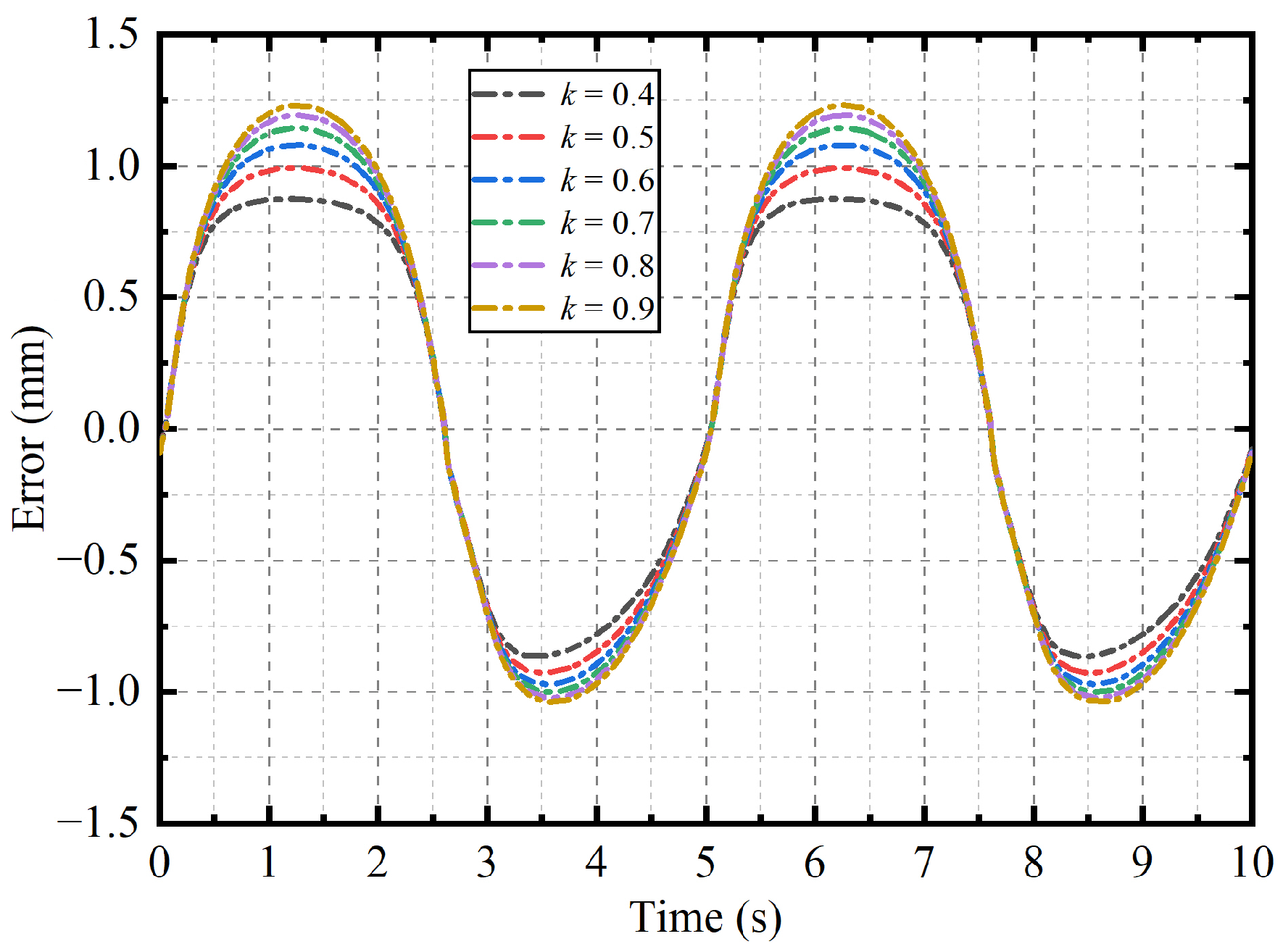
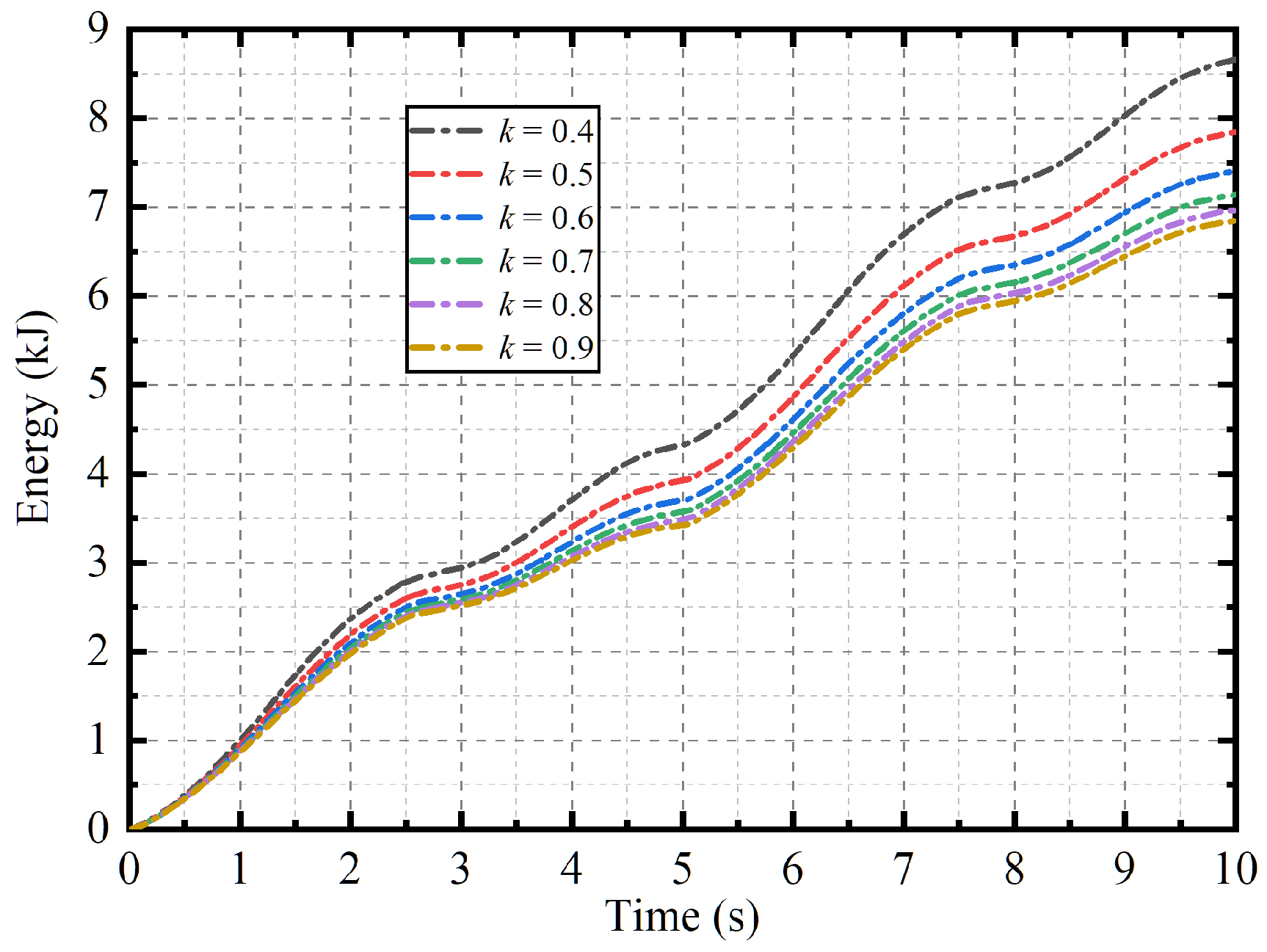
4.5.1. Used-Defined Constant k for Estimating Pressure Loss in Servo Valve
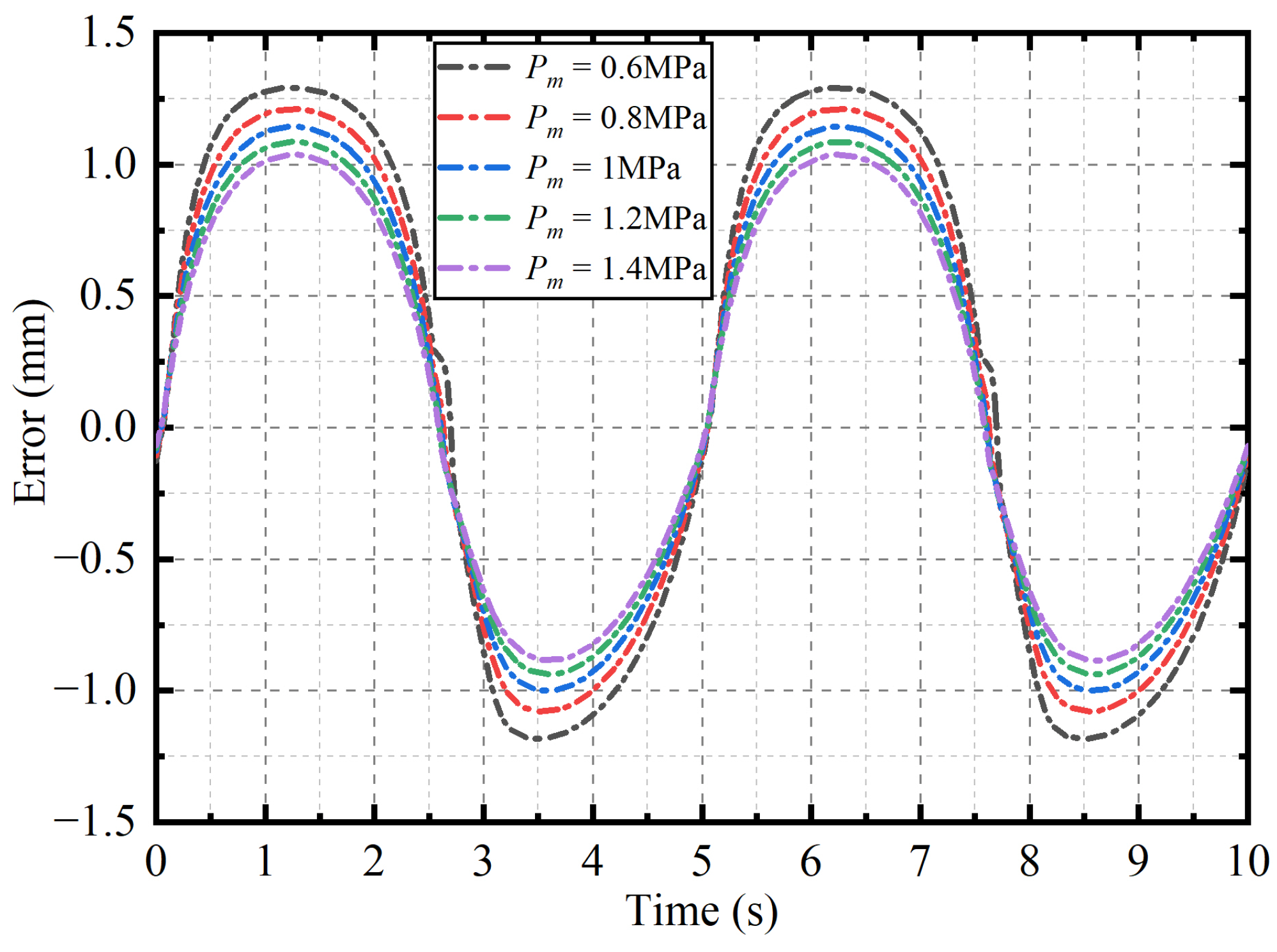
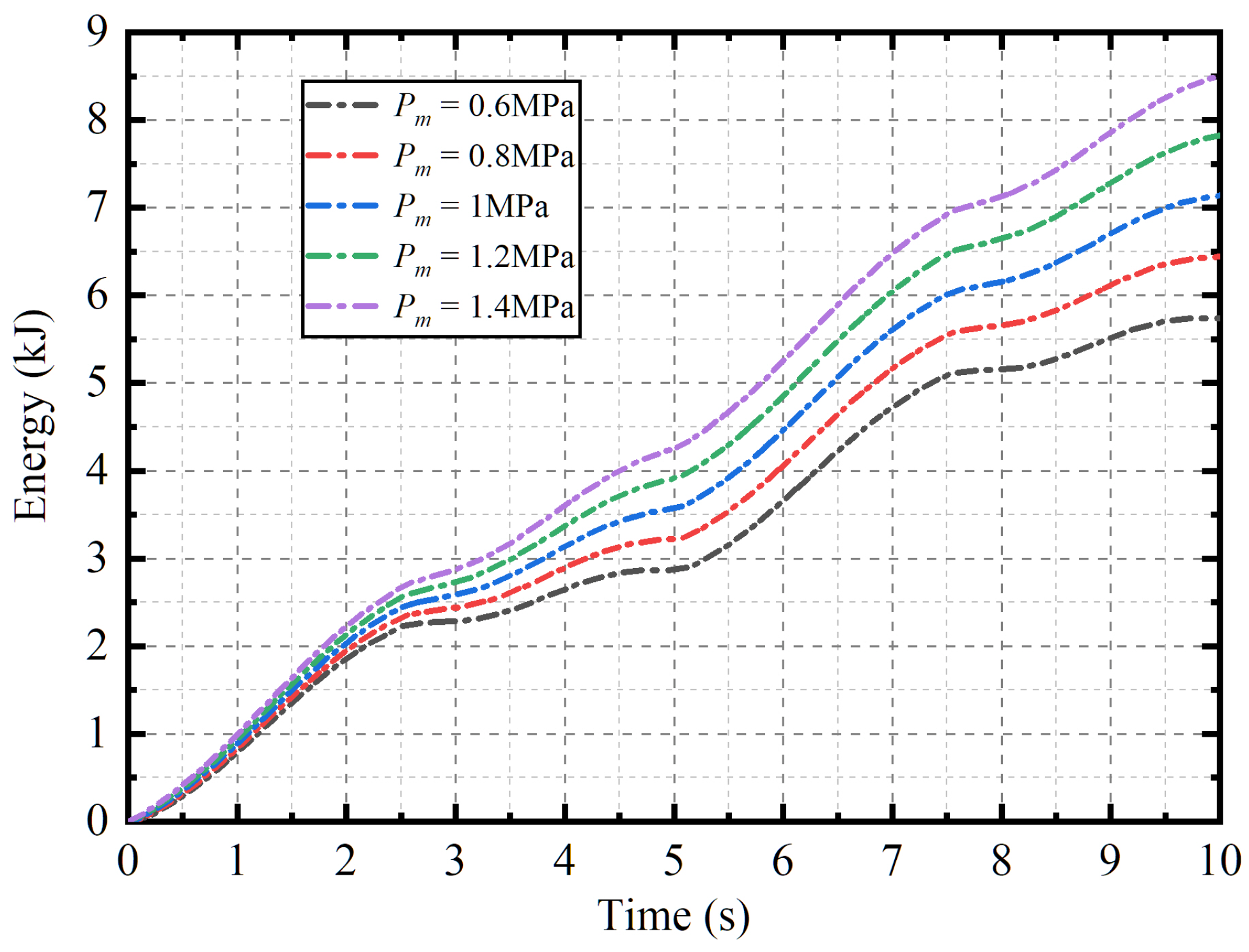
4.5.2. Safety Margin Pressure
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AUVs | Autonomous underwater vehicles |
| HOVs | Human occupied vehicles |
| PID control | Proportional-integral-derivative control |
| ROVs | Remotely operated vehicles |
| VCHCS | Valve-controlled hydraulic cylinder system |
Appendix A. Nomenclature

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Defination | Symbol | Defination |
|---|---|---|---|
| Effective area of left chamber in hydraulic cylinder | Error-related compensated pump pressure | ||
| Effective area of right chamber in hydraulic cylinder | Maximum cracking pressure of proportional relief valve | ||
| Effective area of pressure compensator | Artificially set pressure | ||
| Viscous friction coefficient of pressure compensator | Pressure in oil tank, or pressure at port t of servo valve | ||
| Viscous friction coefficient of hydraulic cylinder | Flow rate at port 1 of hydraulic cylinder | ||
| Drag coefficient | Flow rate at port 2 of hydraulic cylinder | ||
| Inertia coefficient | Flow rate at port a of servo valve | ||
| Internal leakage coefficient of hydraulic cylinder | Flow rate at port b of servo valve | ||
| D | Inner diameter of slender pipeline | Desired flow rate | |
| Cylinder diameter | Flow rate into oil tank | ||
| Piston diameter of hydraulic cylinder | Flow rate out oil tank | ||
| Rod diameter of hydraulic cylinder | u | Current applied to servo valve solenoid | |
| , | Error thresholds | Rated current of servo valve solenoid | |
| Additional load force caused by ambient pressure | Current applied to proportional relief valve solenoid | ||
| Axial component of force applied to hydraulic cylinder | Initial volume of left chamber in hydraulic cylinder | ||
| Gravity of load mass | Initial volume of right chamber in hydraulic cylinder | ||
| k | User-defined constant for estimating pressure loss | Volume of oil chamber in pressure compensator | |
| User defined constants for variable proportional gain | Volume of oil tank | ||
| Spring stiffness of pressure compensator | Velocity of ocean current | ||
| Derivative gain | x | Position of hydraulic cylinder | |
| Integral gain | Velocity of hydraulic cylinder | ||
| Proportional gain | Acceleration of hydraulic cylinder | ||
| Input gain of proportional relief valve | Displacement of piston assembly in pressure compensator | ||
| Flow gain coefficient of servo valve | Velocity of piston assembly in pressure compensator | ||
| Input gain of servo valve | Acceleration of piston assembly in pressure compensator | ||
| L | Length of slender pipeline | Desired position of hydraulic cylinder | |
| Distance from near end of cylinder to rotation axis | Desired velocity of hydraulic cylinder | ||
| Distance from far end of cylinder to rotation axis | Displacement of servo valve spool | ||
| Hydrodynamic torque on cylinder caused by rotation | Viscosity-pressure index of hydraulic oil | ||
| Hydrodynamic torque on cylinder caused by ocean current | Bulk modulus of hydraulic oil | ||
| Mass of piston assembly in pressure compensator | Effective bulk modulus of slender pipeline | ||
| Mass of piston in hydraulic cylinder | Time-varying coefficient for smooth switch | ||
| Pressure at port 1 of hydraulic cylinder | Pipeline pressure loss | ||
| Pressure at port 2 of hydraulic cylinder | Pressure loss in servo valve | ||
| Pressure at port a of servo valve | Dynamic viscosity of hydraulic oil | ||
| Ambient pressure | Initial dynamic viscosity of hydraulic oil | ||
| Pressure at port b of servo valve | Inclination angle of cylinder | ||
| Safety margin pressure | Density of hydraulic oil | ||
| Pipeline outlet pressure | Density of seawater | ||
| Pressure at port p of servo valve, or pump pressure | Angular velocity of cylinder | ||
| Desired pump pressure |
Appendix B. Parameter Settings
| Object | Parameter | Symbol | Value |
|---|---|---|---|
| Hydraulic oil | Bulk modulus | 1400 MPa | |
| Density | 850 kg/m | ||
| Initial kinematic viscosity | - | 10 cSt | |
| Viscosity-pressure index | Pa | ||
| Pressure compensator | Mass of piston assembly | 1 kg | |
| Spring stiffness | 3 N/mm | ||
| Spring pre-compression | - | 300 mm | |
| Viscous friction coefficient | 1000 N/(m/s) | ||
| Oil chamber length | - | 250 mm | |
| Piston diameter | - | 250 mm | |
| Rod diameter | - | 0 mm | |
| Oil tank | Volume | 100 L | |
| Pump | Displacement | - | 6 mL/rev |
| Motor | Rotate speed | - | 1450 rev/min |
| Proportional relief valve | Maximum cracking pressure | 31.5 MPa | |
| Input gain | MPa/mA | ||
| Servo valve | Total gain | ||
| Rated current | 10 mA | ||
| Slender pipeline | Length | L | 5 m |
| Inner diameter | D | 6 mm | |
| Relative roughness | - | 0 | |
| Evaluation of wall bulk modulus | - | Infinitely stiff wall | |
| Hydraulic cylinder | Viscous friction coefficient | N/(m/s) | |
| Piston diameter | 45 mm | ||
| Rod diameter | 25 mm | ||
| Mass of piston | 5 kg | ||
| Internal leakage coefficient | m/s/Pa | ||
| Displacement sensor | Gain | - | 1000 m |
| Mechanical system | Gravity of load mass | 800 N | |
| Mass of beam | - | 50 kg | |
| Hydrodynamics | Drag coefficient | 1.2 | |
| Inertia coefficient | 2 | ||
| Velocity of ocean current | 0.5 m/s | ||
| Controller | Proportional gain | 4 + 0.5 | |
| Integral gain | 0.001 | ||
| Derivative gain | 0.005 | ||
| Error thresholds | , | 2.5, 5 | |
| Artificially set pressure | 20 MPa | ||
| User-defined constant | k | 0.7 | |
| Safety margin pressure | 1 MPa |
References
- Lynch, B.; Ellery, A. Efficient Control of an AUV-Manipulator System: An Application for the Exploration of Europa. IEEE J. Ocean. Eng. 2014, 39, 552–570. [Google Scholar] [CrossRef]
- Sivčev, S.; Rossi, M.; Coleman, J.; Omerdić, E.; Dooly, G.; Toal, D. Collision Detection for Underwater ROV Manipulator Systems. Sensors 2018, 18, 1117. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, C.; Zhang, Q.; Zhang, Q.; Zhang, Y.; Huo, L.; Wang, X. Construction and Research of an Underwater Autonomous Dual Manipulator Platform. In Proceedings of the 2018 OCEANS—MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Sivčev, S.; Coleman, J.; Omerdić, E.; Dooly, G.; Toal, D. Underwater manipulators: A review. Ocean Eng. 2018, 163, 431–450. [Google Scholar] [CrossRef]
- Liu, Y.; Wu, D.; Li, D.; Deng, Y. Applications and Research Progress of Hydraulic Technology in Deep Sea. J. Mech. Eng. 2018, 54, 14–23. [Google Scholar] [CrossRef]
- Wang, F.; Chen, Y. Dynamic characteristics of pressure compensator in underwater hydraulic system. IEEE-ASME Trans. Mechatron. 2014, 19, 777–787. [Google Scholar] [CrossRef]
- Wu, J.B.; Li, L.; Wei, W. Research on dynamic characteristics of pressure compensator for deep-sea hydraulic system. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2022, 256, 19–33. [Google Scholar] [CrossRef]
- Liu, Y.; Ren, X.; Wu, D.; Li, D.; Li, X. Simulation and analysis of a seawater hydraulic relief valve in deep-sea environment. Ocean Eng. 2016, 125, 182–190. [Google Scholar] [CrossRef]
- Liu, Y.; Deng, Y.; Fang, M.; Li, D.; Wu, D. Research on the torque characteristics of a seawater hydraulic axial piston motor in deep-sea environment. Ocean Eng. 2017, 146, 411–423. [Google Scholar] [CrossRef]
- Li, L.; Wu, J.B. Deformation and leakage mechanisms at hydraulic clearance fit in deep-sea extreme environment. Phys. Fluids 2020, 32, 067115. [Google Scholar] [CrossRef]
- Ye, Y.; Yin, C.B.; Gong, Y.; Zhou, J.J. Position control of nonlinear hydraulic system using an improved PSO based PID controller. Mech. Syst. Signal Process. 2017, 83, 241–259. [Google Scholar] [CrossRef]
- Yao, J.; Deng, W.; Sun, W. Precision Motion Control for Electro-Hydraulic Servo Systems With Noise Alleviation: A Desired Compensation Adaptive Approach. IEEE/ASME Trans. Mechatron. 2017, 22, 1859–1868. [Google Scholar] [CrossRef]
- Won, D.; Kim, W.; Tomizuka, M. Nonlinear Control With High-Gain Extended State Observer for Position Tracking of Electro-Hydraulic Systems. IEEE/ASME Trans. Mechatron. 2020, 25, 2610–2621. [Google Scholar] [CrossRef]
- Wang, C.; Ji, X.; Zhang, Z.; Zhao, B.; Quan, L.; Plummer, A. Tracking differentiator based back-stepping control for valve-controlled hydraulic actuator system. ISA Trans. 2021, 119, 208–220. [Google Scholar] [CrossRef] [PubMed]
- Yao, J.; Wang, C. Model reference adaptive control for a hydraulic underwater manipulator. J. Vib. Control 2012, 18, 893–902. [Google Scholar] [CrossRef]
- Cao, X.; Gu, L.; Luo, G.; Wang, Y. The adaptive robust tracking control of deep-sea hydraulic manipulator based on backstepping design. In Proceedings of the OCEANS 2015—MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, Q.; Zhang, A.; Cui, S.; Du, L.; Huo, L. Experiment research on control performance for the actuators of a deep-sea hydraulic manipulator. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Tian, Q.; Zhang, Q.; Chen, Y.; Huo, L.; Li, S.; Wang, C.; Bai, Y.; Du, L. Influence of Ambient Pressure on Performance of a Deep-sea Hydraulic Manipulator. In Proceedings of the OCEANS 2019, Marseille, France, 17–20 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Wu, J.B.; Li, L.; Zou, X.L.; Wang, P.J.; Wei, W. Working Performance of the Deep-Sea Valve-Controlled Hydraulic Cylinder System under Pressure-Dependent Viscosity Change and Hydrodynamic Effects. J. Mar. Sci. Eng. 2022, 10, 362. [Google Scholar] [CrossRef]
- Baghestan, K.; Rezaei, S.M.; Talebi, H.A.; Zareinejad, M. An energy-saving nonlinear position control strategy for electro-hydraulic servo systems. ISA Trans. 2015, 59, 268–279. [Google Scholar] [CrossRef]
- Lin, T.; Zhou, S.; Chen, Q.; Fu, S. A Novel Control Strategy for an Energy Saving Hydraulic System With Near-Zero Overflowing Energy-Loss. IEEE Access 2018, 6, 33810–33818. [Google Scholar] [CrossRef]
- Lyu, L.; Chen, Z.; Yao, B. Advanced Valves and Pump Coordinated Hydraulic Control Design to Simultaneously Achieve High Accuracy and High Efficiency. IEEE Trans. Control Syst. Technol. 2021, 29, 236–248. [Google Scholar] [CrossRef]
- Wang, W.; Du, W.; Cheng, C.; Lu, X.; Zou, W. Output feedback control for energy-saving asymmetric hydraulic servo system based on desired compensation approach. Appl. Math. Model. 2022, 101, 360–379. [Google Scholar] [CrossRef]
- Tongli, C. Hydraulic Control Systems; Tsinghua University Press: Beijing, China, 2014. (In Chinese) [Google Scholar]
- Barus, C. Isothermals, isopiestics, and isometrics relative to viscosity. Am. J. Sci. 1893, 45, 87–96. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, Q.; Tian, Q.; Huo, L.; Feng, X. Fuzzy Adaptive Impedance Control for Deep-Sea Hydraulic Manipulator Grasping Under Uncertainties. In Proceedings of the Global Oceans 2020: Singapore—U.S. Gulf Coast, Biloxi, MS, USA, 5–30 October 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Idelchik, I.E. Handbook of Hydraulic Resistance, 4th ed.; Begell House, Inc.: New York, NY, USA, 2007. [Google Scholar]
- Wu, J.B.; Li, L. Pipeline Pressure Loss in Deep-Sea Hydraulic Systems Considering Pressure-Dependent Viscosity Change of Hydraulic Oil. J. Mar. Sci. Eng. 2021, 9, 1142. [Google Scholar] [CrossRef]
- Praks, P.; Brkić, D. Review of new flow friction equations: Constructing Colebrook’s explicit correlations accurately. Rev. Int. Métodos Numér. Para Cálc. Diseño Ing. 2020, 36, 41. [Google Scholar] [CrossRef]
- Brkić, D.; Praks, P. Accurate and Efficient Explicit Approximations of the Colebrook Flow Friction Equation Based on the Wright ω-Function: Reply to Discussion. Mathematics 2019, 7, 410. [Google Scholar] [CrossRef] [Green Version]
- Sumer, B.M.; Fredse, J. Hydrodynamics Around Cylindrical Structures; World Scientific Publishing Co. Re. Ltd.: Singapore, 1997. [Google Scholar]
- Venkaiah, P.; Sarkar, B.K. Hydraulically actuated horizontal axis wind turbine pitch control by model free adaptive controller. Renew. Energy 2020, 147, 55–68. [Google Scholar] [CrossRef]
- Huang, Z.; Liu, X.; Fu, H.; Du, Z. A novel parameter optimisation method of hydraulic turbine regulating system based on fuzzy differential evolution algorithm and fuzzy PID controller. Int. J. Bio-Inspired Comput. 2021, 18, 153–164. [Google Scholar] [CrossRef]
- Yao, J.; Wang, L.; Wang, C.; Zhang, Z.; Jia, P. ANN-based PID controller for an electro-hydraulic servo system. In Proceedings of the 2008 IEEE International Conference on Automation and Logistics, Qingdao, China, 1–3 September 2008; pp. 18–22. [Google Scholar] [CrossRef]
- J, V.; Sarkar, B.K. Francis turbine electrohydraulic inlet guide vane control by artificial neural network 2 degree-of-freedom PID controller with actuator fault. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2021, 235, 1494–1509. [Google Scholar] [CrossRef]
- Wang, N.; Wang, J.; Li, Z.; Tang, X.; Hou, D. Fractional-Order PID Control Strategy on Hydraulic-Loading System of Typical Electromechanical Platform. Sensors 2018, 18, 3024. [Google Scholar] [CrossRef] [Green Version]
- Venkaiah, P.; Sarkar, B.K. Electrohydraulic proportional valve-controlled vane type semi-rotary actuated wind turbine control by feedforward fractional-order feedback controller. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2022, 236, 318–337. [Google Scholar] [CrossRef]


| Object | Parameter | Symbol | Value |
|---|---|---|---|
| Position control | Proportional gain | 4 + 0.5 × 10 | |
| Integral gain | 0.001 | ||
| Derivative gain | 0.005 | ||
| Energy-saving control | Error thresholds | , | 2.5, 5 |
| Artificially set pressure | 20 MPa | ||
| User-defined constant | k | 0.7 | |
| Safety margin pressure | 1 MPa |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.-B.; Li, L.; Yan, Y.-K.; Wang, P.-J.; Wei, W. An Energy-Saving Position Control Strategy for Deep-Sea Valve-Controlled Hydraulic Cylinder Systems. J. Mar. Sci. Eng. 2022, 10, 567. https://doi.org/10.3390/jmse10050567
Wu J-B, Li L, Yan Y-K, Wang P-J, Wei W. An Energy-Saving Position Control Strategy for Deep-Sea Valve-Controlled Hydraulic Cylinder Systems. Journal of Marine Science and Engineering. 2022; 10(5):567. https://doi.org/10.3390/jmse10050567
Chicago/Turabian StyleWu, Jia-Bin, Li Li, Yong-Kang Yan, Pin-Jian Wang, and Wei Wei. 2022. "An Energy-Saving Position Control Strategy for Deep-Sea Valve-Controlled Hydraulic Cylinder Systems" Journal of Marine Science and Engineering 10, no. 5: 567. https://doi.org/10.3390/jmse10050567