
Surge Response Analysis of the Serbuoys-TLP Tension Leg Platform under the Action of Wave–Current Coupling

Abstract
:1. Introduction
2. Numerical Methods
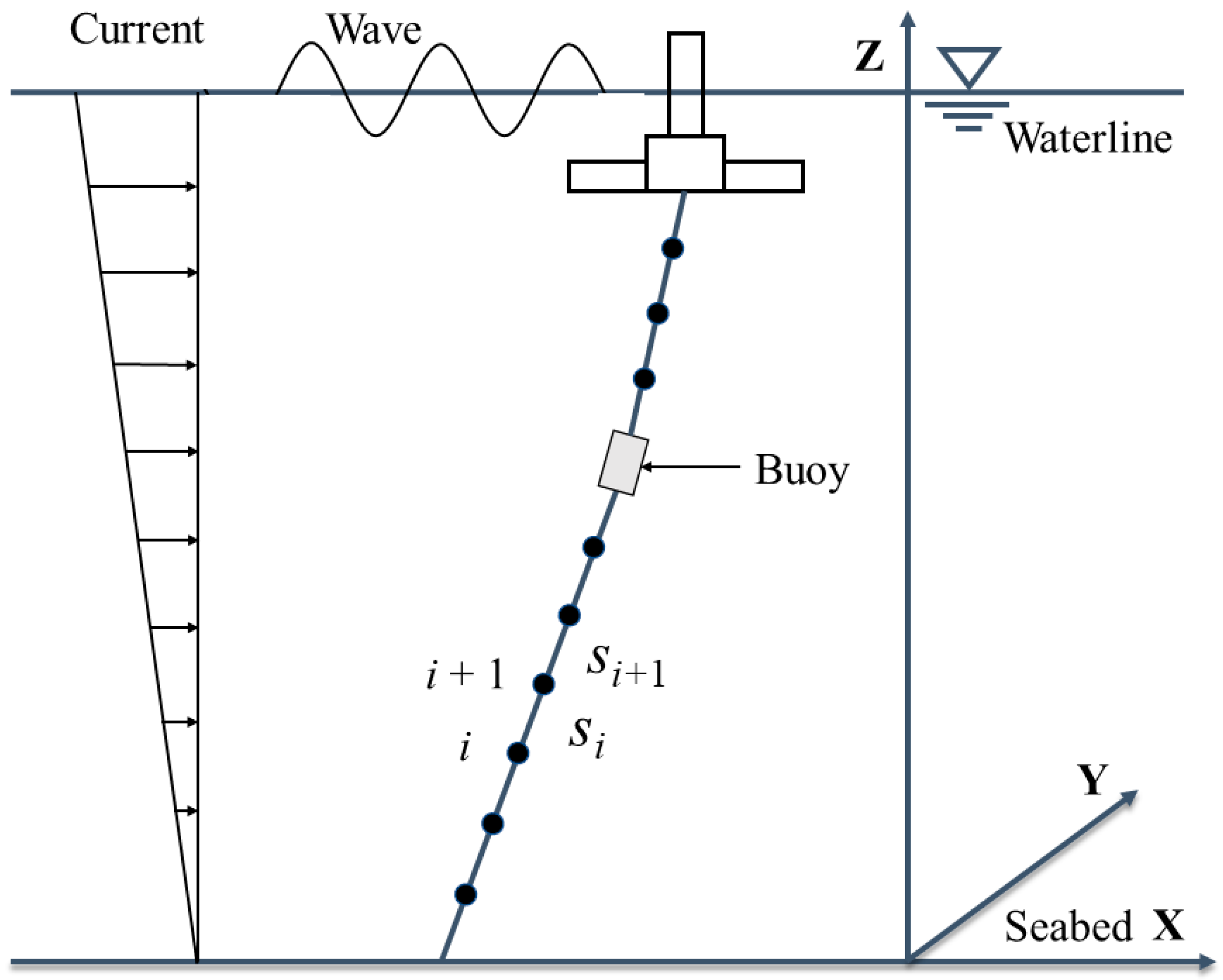
2.1. Numerical Model of the Mooring System
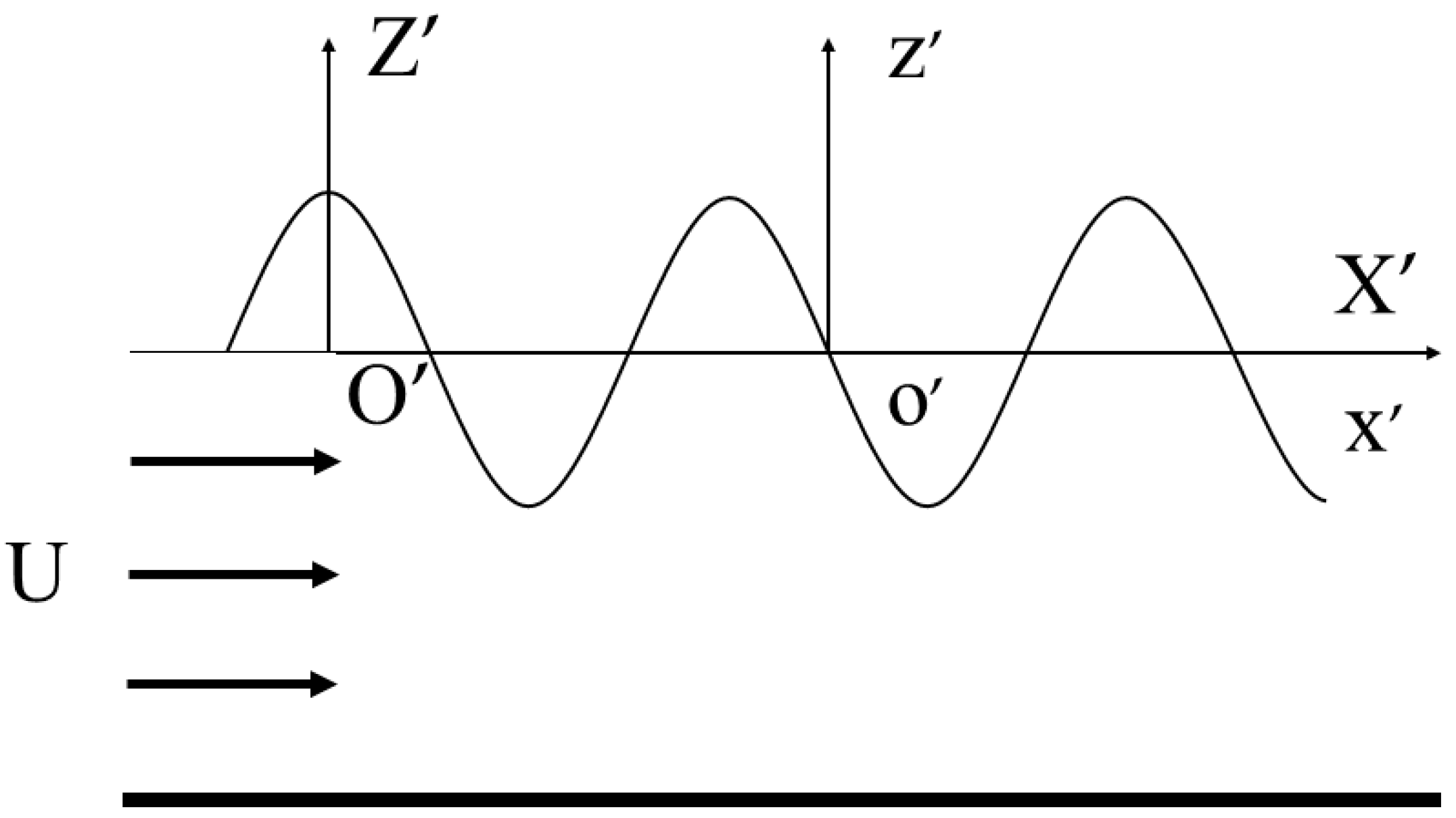
2.2. Wave and Current Loads
2.3. Equations of Motion
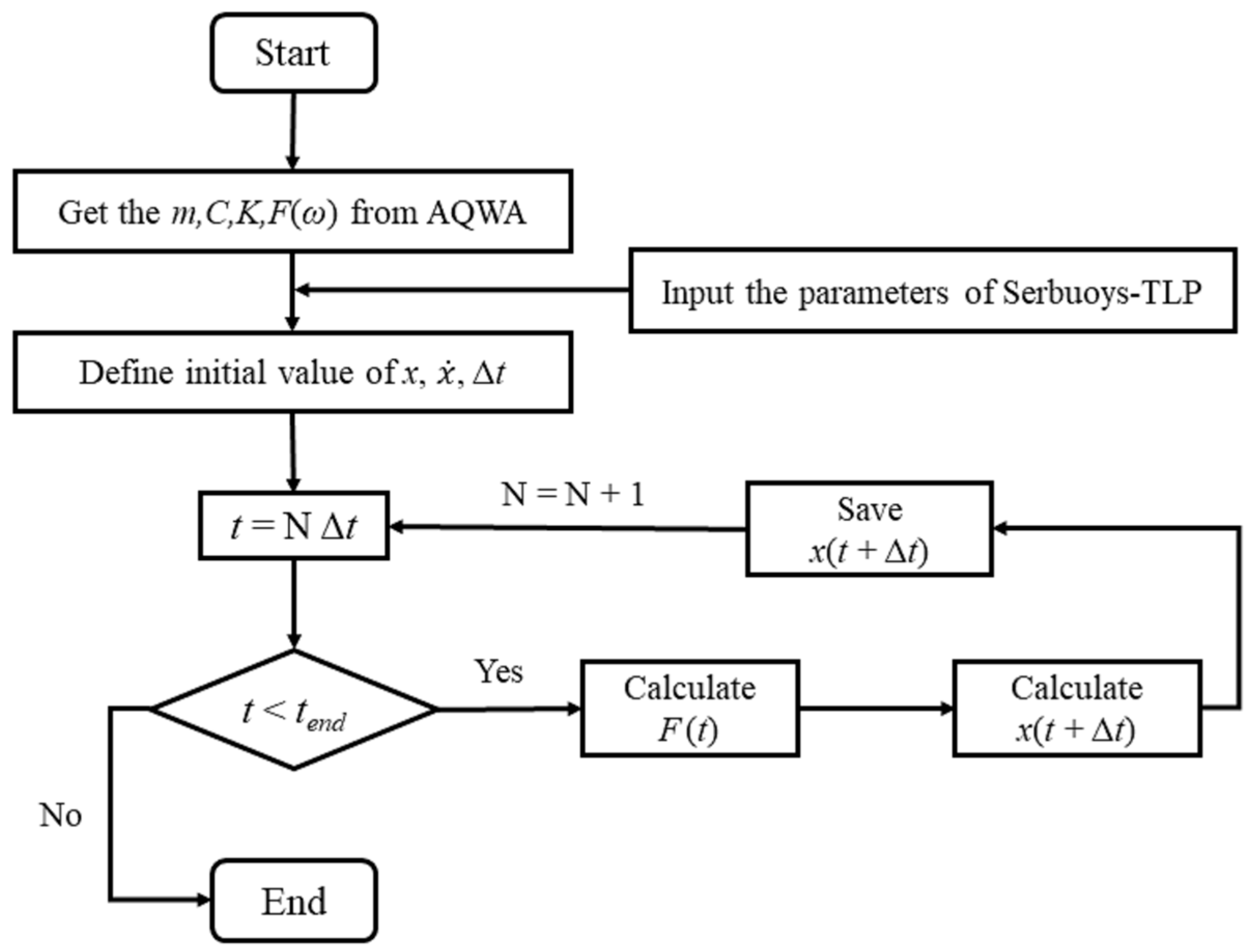
2.4. Solving the Equations of Motion
3. Validation of the Numerical Model
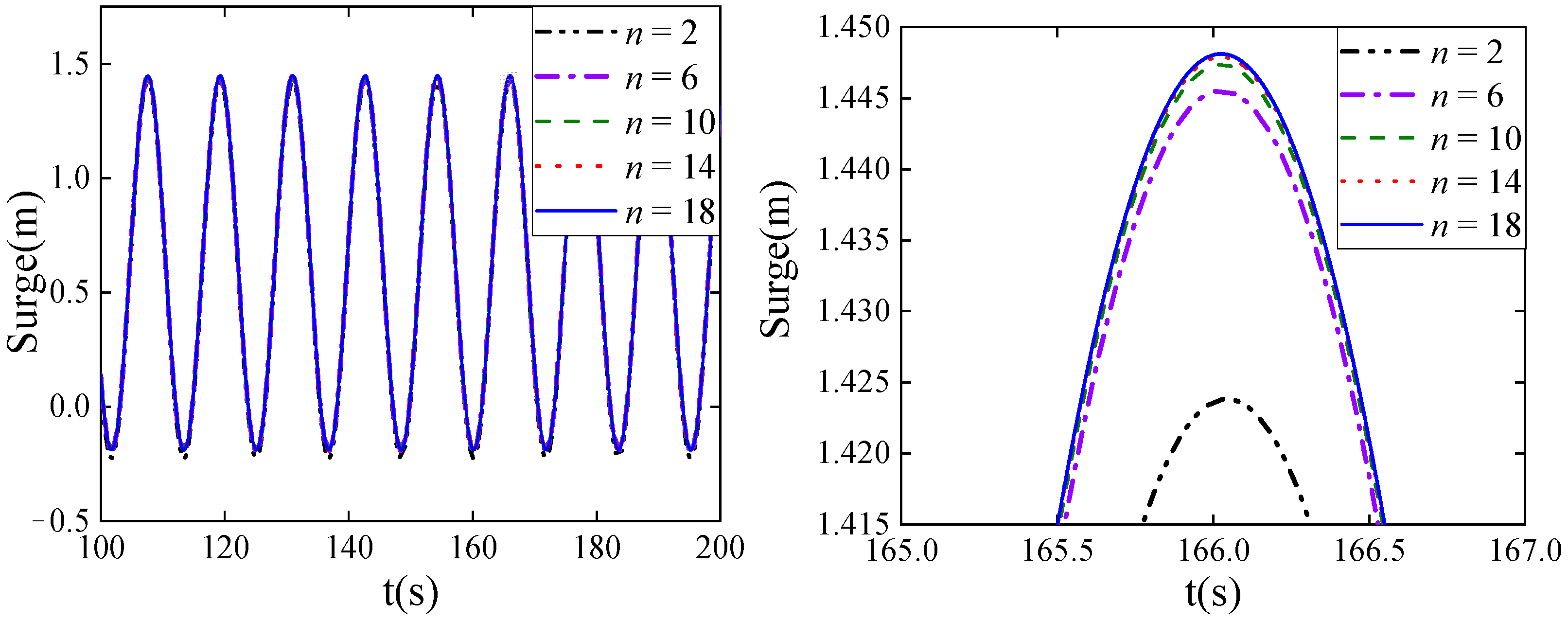
3.1. Verification of Surge Response Convergence
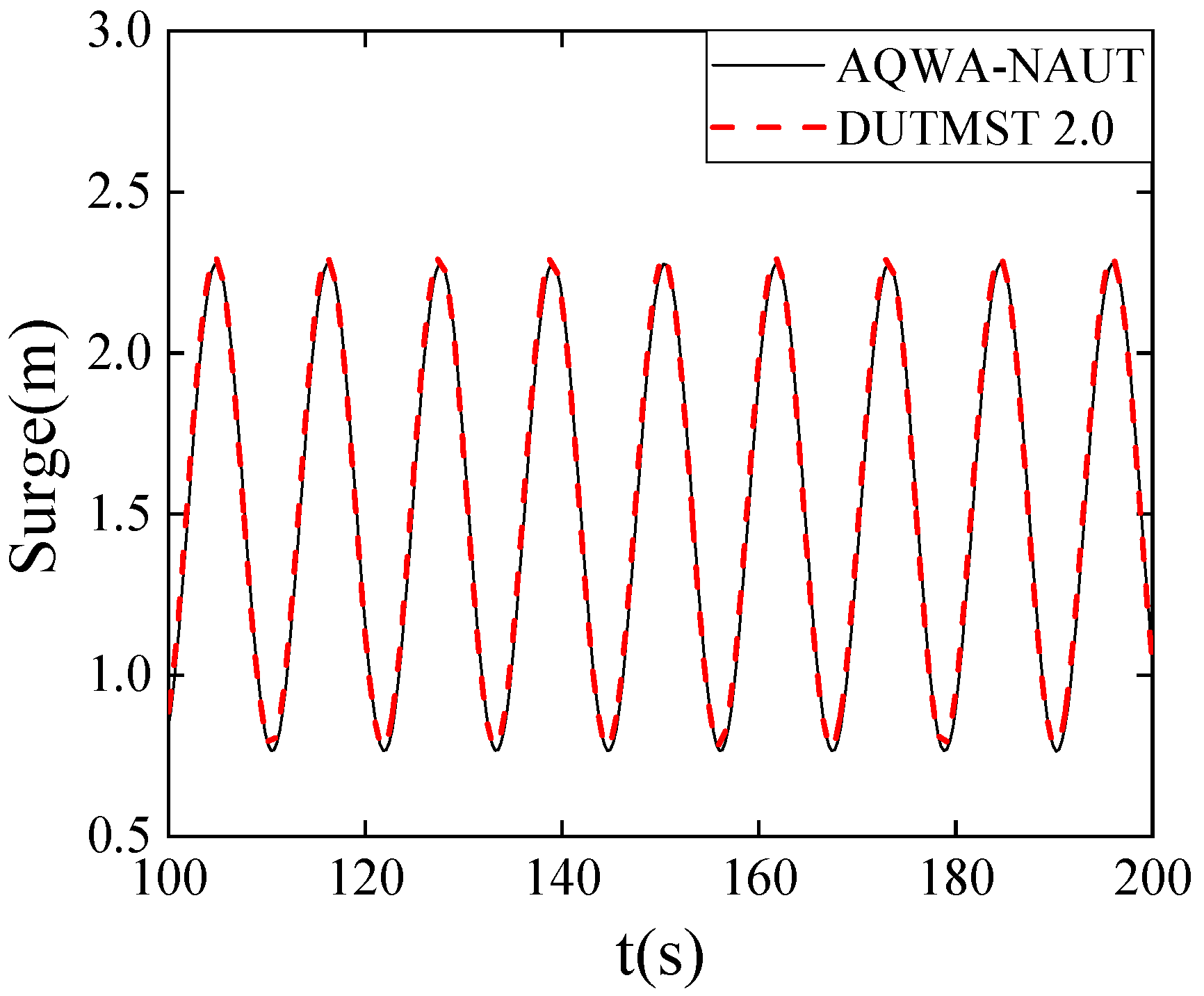
3.2. Validation of Wave–Current Coupling
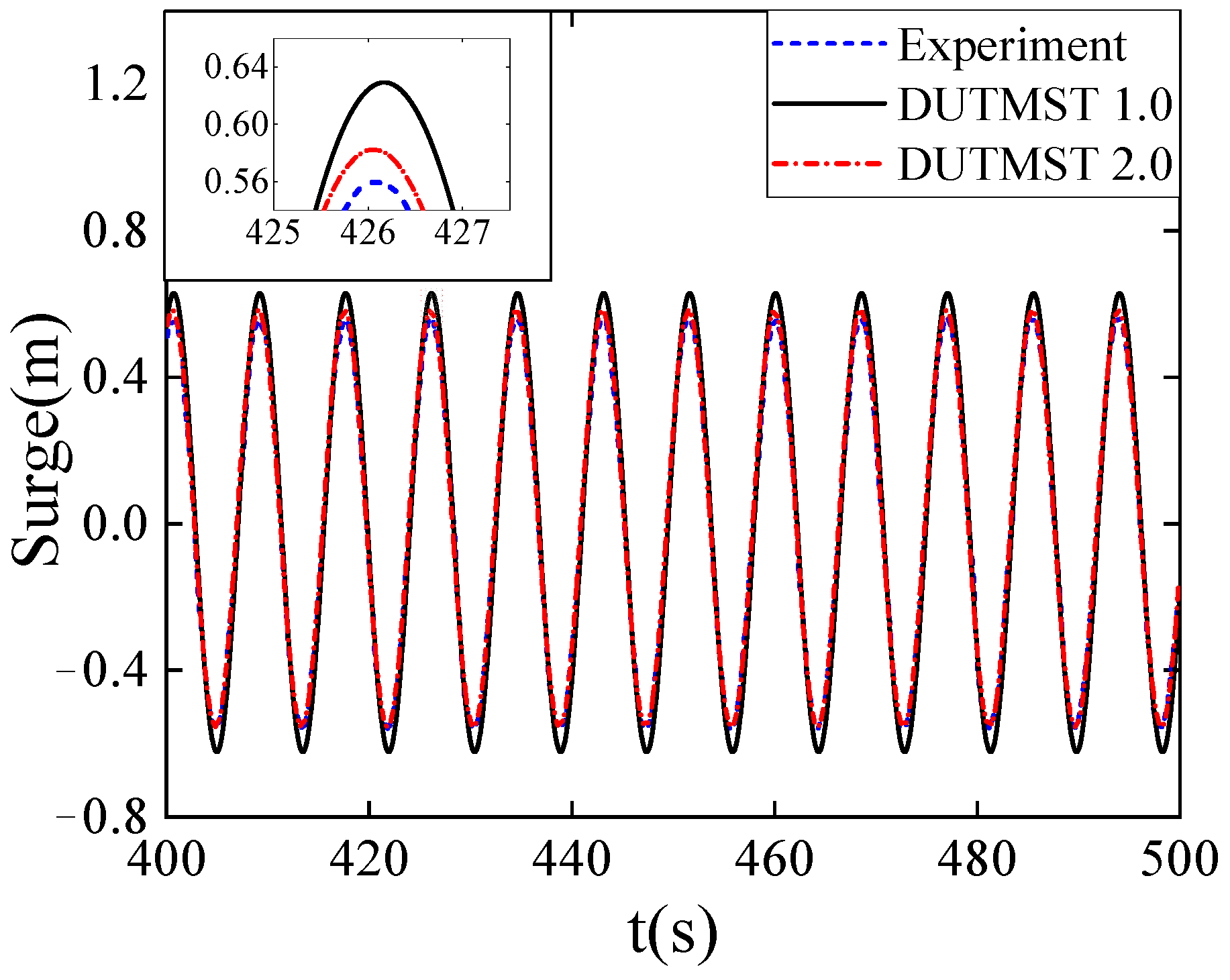
3.3. Validation of the Serbuoys-TLP Surge Response
4. Results and Discussion
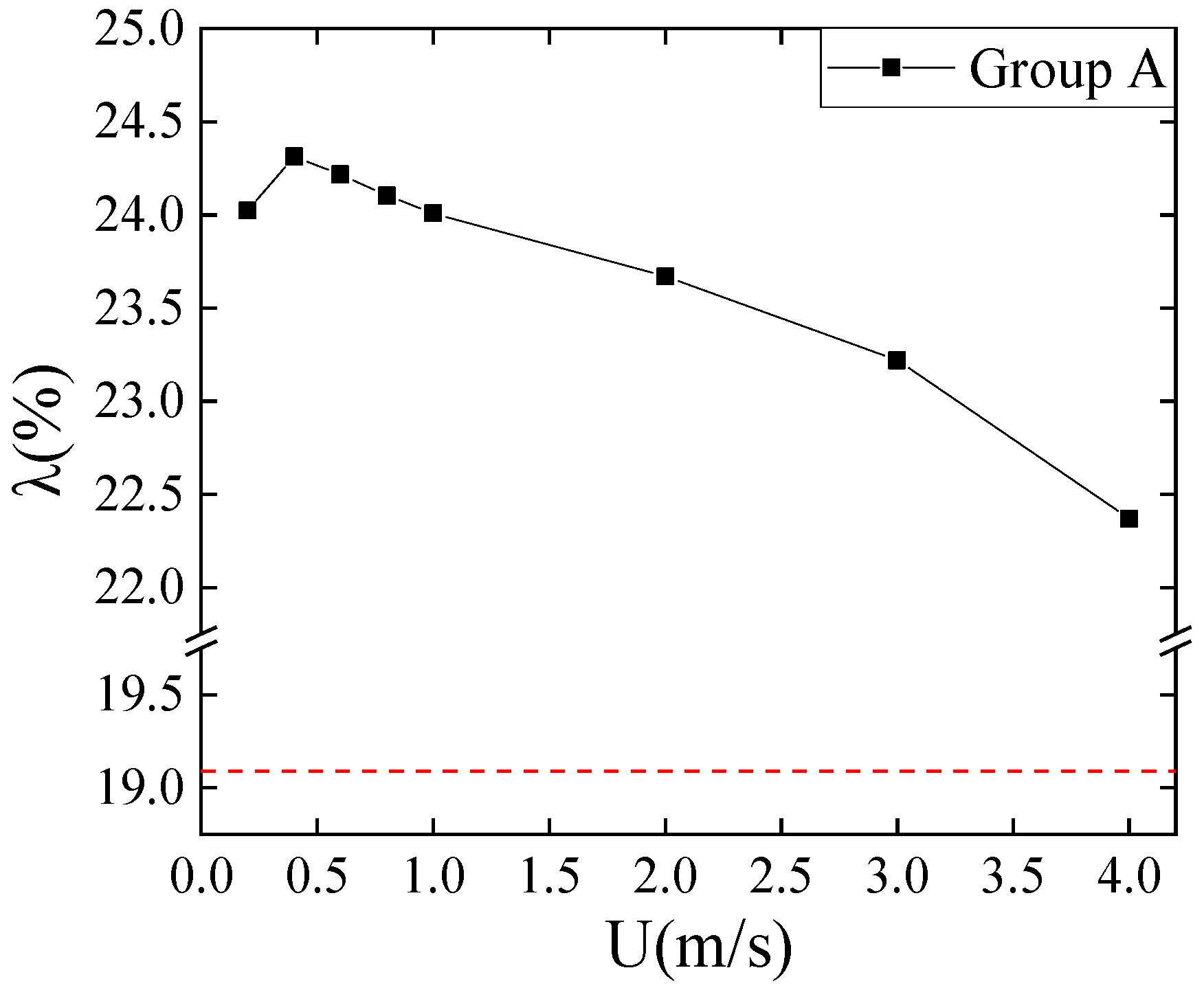
4.1. Effect of Current Velocity on the Surge Response of the Serbuoys-TLP
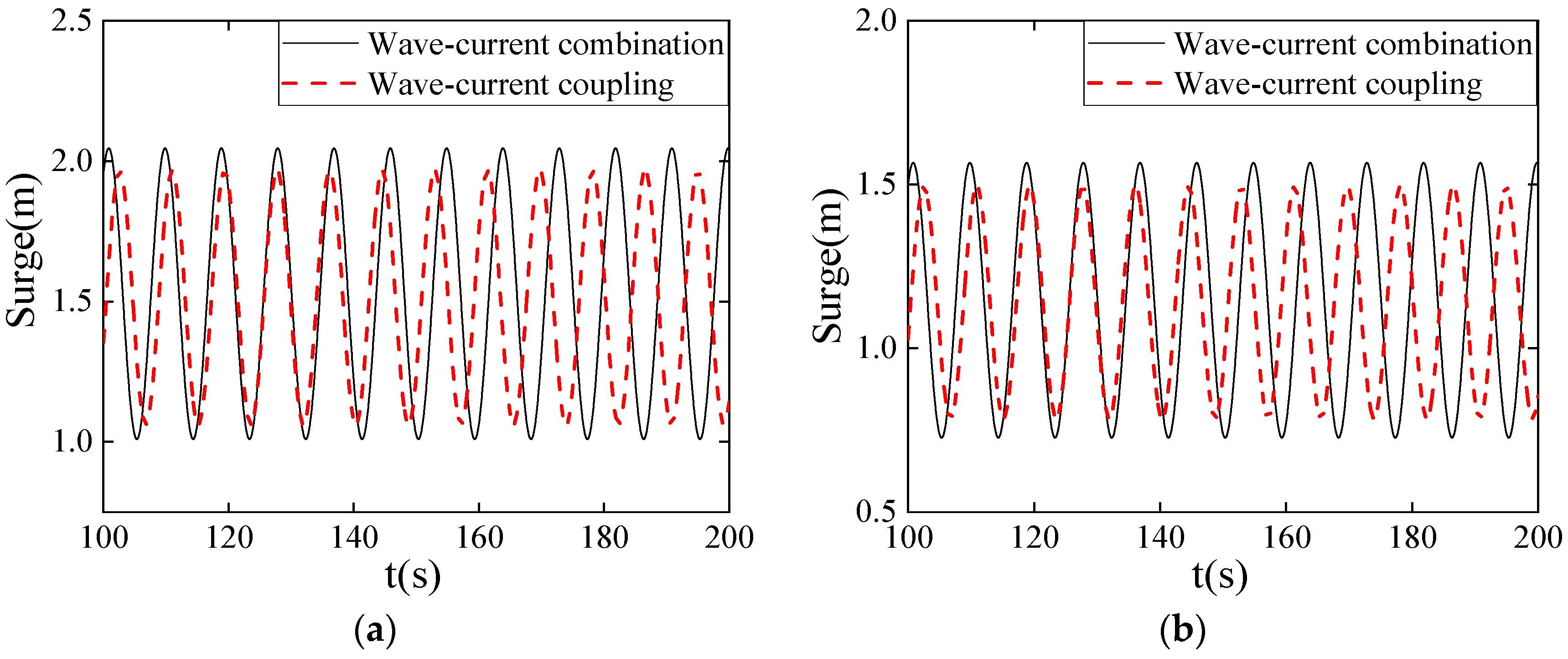
4.2. Effect of Whether the Waves and Currents Are Coupled on the Surge
5. Conclusions
- The surge suppression efficiency (λ) of the Serbuoys-TLP was 19.09% under pure wave action, while the suppression efficiency λ was about 24% under wave–current coupling condition and the suppression efficiency λ increased rapidly and then decreased slowly as the current velocity increased.
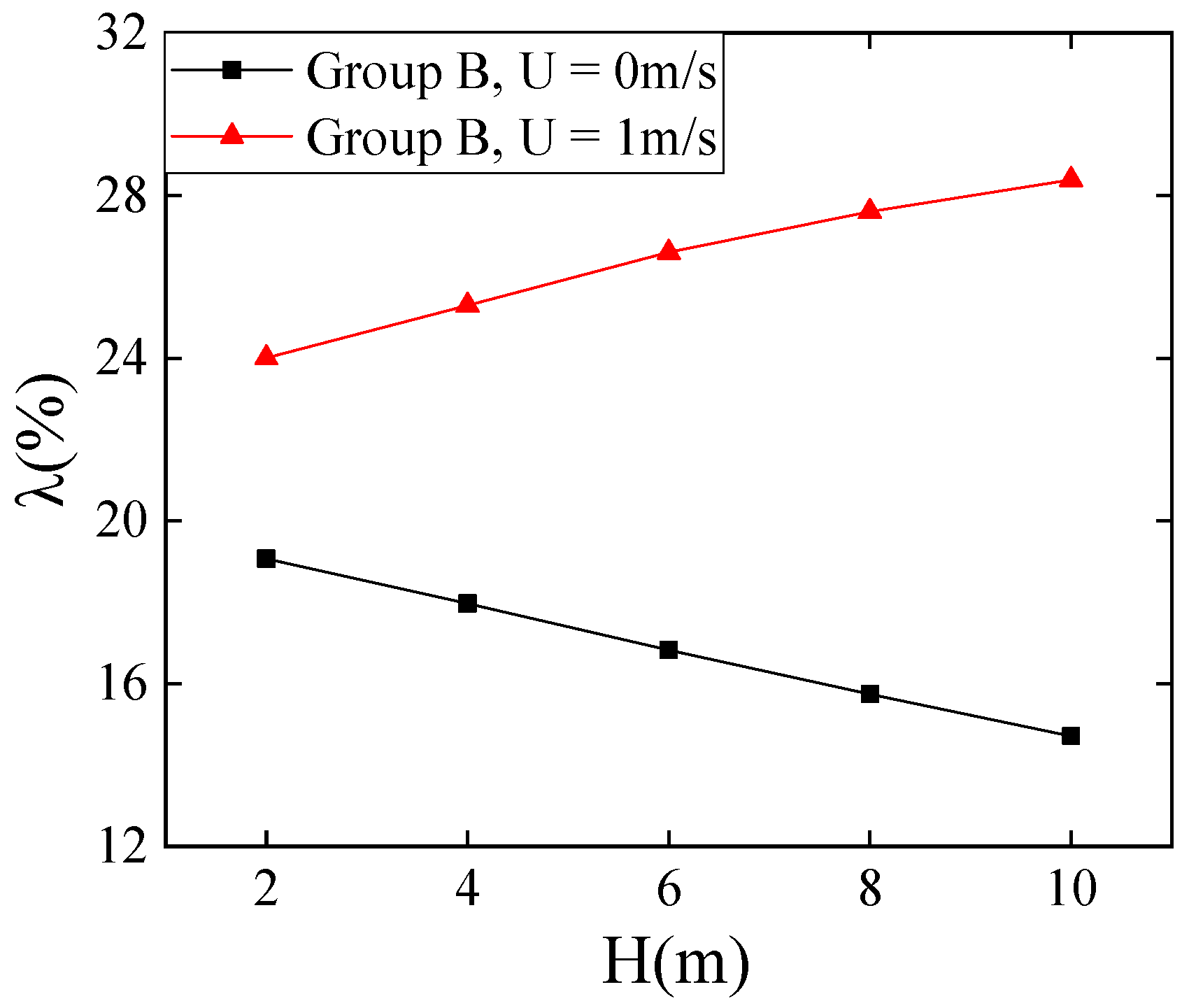
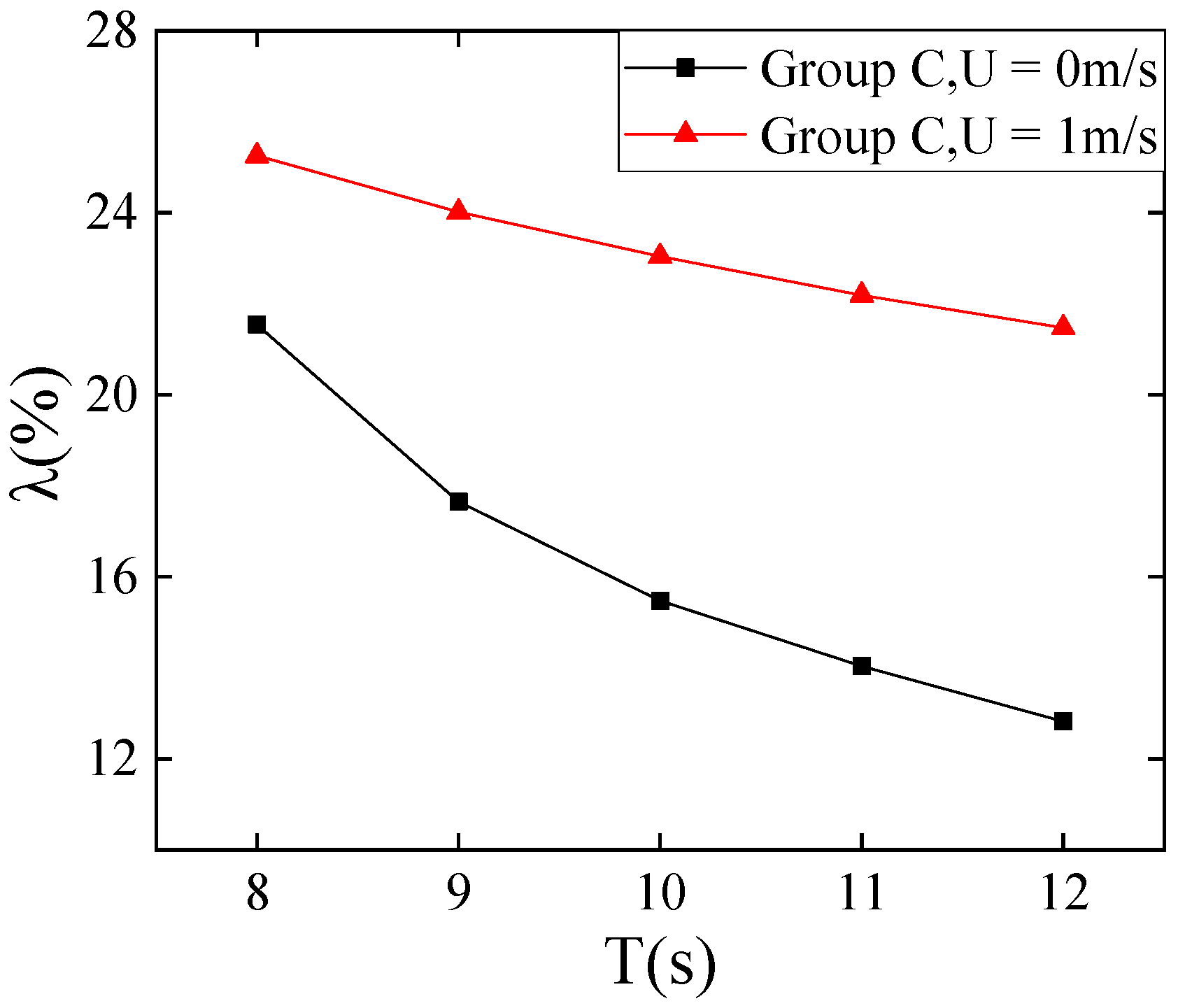
- Under pure wave conditions, a negative correlation was found between the suppression efficiency λ and wave height or period. Under wave–current coupling conditions, something different was found: first, the suppression efficiency λ increased as the wave height became larger; second, the percentage of the decrease in λ with a varying period was smaller than that under pure wave conditions As the period increased, this percentage increased from 4.46% to 8.12%.
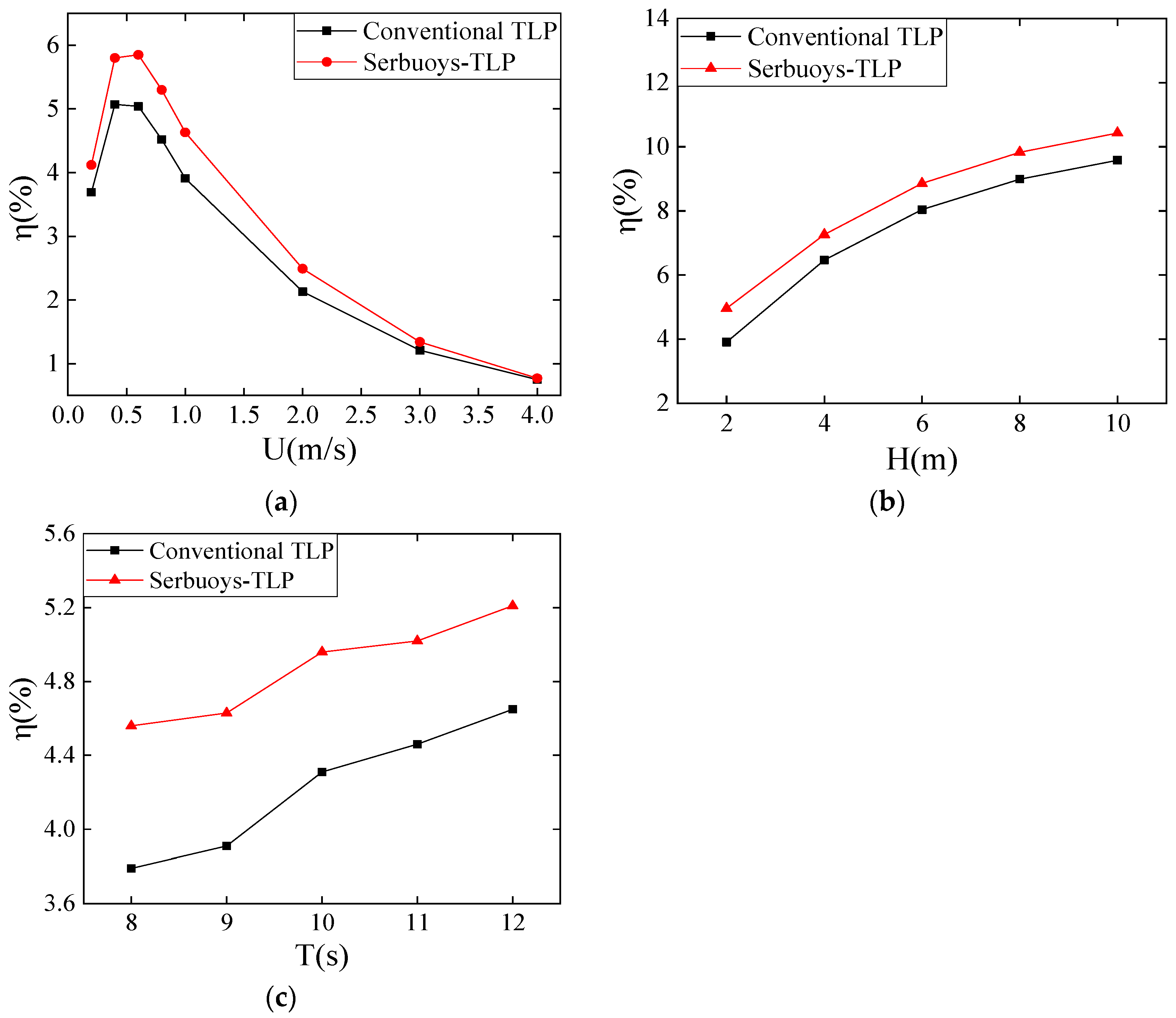
- If the coupling effect between waves and currents is not considered, the surge response of a TLP will be overestimated. The effect of whether the wave and current are coupled was greater on the surge response of the Serbuoys-TLP, being 1% higher than the effect on that of the conventional TLP.
- The effect of whether the waves and currents are coupled on the surge of the Serbuoys-TLP (η) increased and then decreased with an increase in current velocity, up to a maximum of 5.85%. η increased from 4.96% to 10.43% with an increase in wave height. η increased from 4.56% to 5.21% with an increase in wave period.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Myhr, A.; Bjerkseter, C.; Ågotnes, A.; Nygaard, T.A. Levelsed cost of energy for offshore floating wind turbines in a life cycle perspective. Renew. Energy 2014, 66, 714–728. [Google Scholar] [CrossRef] [Green Version]
- Chandrasekaran, S.; Nagavinothini, R. Dynamic analyses and preliminary design of offshore triceratops in ultra-deep waters. Innov. Infrastruct. Solut 2018, 3, 16. [Google Scholar] [CrossRef]
- Ren, Y.; Vengatesan, V.; Shi, W. Dynamic Analysis of a Multi-column TLP Floating Offshore Wind Turbine with Tendon Failure Scenarios. Ocean Eng. 2022, 245, 110472. [Google Scholar] [CrossRef]
- Huang, Z.; Ding, Q.; Li, C. Study on Dynamic Response of Floating Wind Turbine with a New Type of Tension Leg Platform. J. Eng. Therm. Energy Power 2019, 34, 156–163. [Google Scholar]
- Bangga, G.; Guma, G.; Lutz, T.; Krämer, E. Numerical simulations of a large offshore wind turbine exposed to turbulent inflow conditions. Wind Eng. 2018, 42, 88–96. [Google Scholar] [CrossRef]
- Song, J.; Lim, H.C. Study of floating wind turbine with modified tension leg platform placed in regular waves. Energies 2019, 12, 703. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.; Basu, B. Wave-current interaction effects on structural responses of floating offshore wind turbines. Wind Energy 2019, 22, 327–339. [Google Scholar] [CrossRef]
- Hong, J.S.; Moon, J.H.; Kim, T.; Cho, I.H.; Choi, J.; Park, J.Y. Response of wave energy to tidal currents in the western sea of Jeju Island, Korea. Renew. Energy 2021, 172, 564–573. [Google Scholar] [CrossRef]
- Tabeshpour, M.R.; Shoghi, R. Perturbation nonlinear response of tension leg platform under regular wave excitation. J. Mar. Sci. Technol. 2018, 23, 132–140. [Google Scholar] [CrossRef]
- Tabeshpour, M.R.; Hedayatpour, R. Analytical investigation of nonlinear heave-coupled response of tension leg platform. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2018, 233, 699–713. [Google Scholar] [CrossRef]
- Silva, M.C.; Vitola, M.A.; Esperanc, P.T.T.; Sphaier, S.H.; Levi, C.A. Numerical simulations of wave-current flow in an ocean basin. Appl. Ocean Res. 2016, 61, 32–41. [Google Scholar] [CrossRef]
- Xie, T.; Zhao, S.Z.; Perrie, W.; Fang, H.; Yu, W.J.; He, Y.J. Electromagnetic backscattering from one-dimensional drifting fractal sea surface I: Wave-current coupled model. Chin. Phys. B 2016, 25, 214–222. [Google Scholar] [CrossRef]
- El-Shahat, S.A.; Li, G.; Fu, L. Investigation of wave-current interaction for a tidal current turbine. Energy 2021, 227, 120377. [Google Scholar] [CrossRef]
- Zhao, Y.; She, X.; He, Y.; Yang, J.; Peng, T.; Kou, Y. Experimental study on new multi-column tension-leg-type floating wind turbine. China Ocean Eng. 2018, 32, 123–131. [Google Scholar] [CrossRef]
- Qu, X.; Li, Y.; Tang, Y.; Hu, Z.; Zhang, P.; Yin, T. Dynamic response of spar-type floating offshore wind turbine in freak wave considering the wave-current interaction effect. Appl. Ocean Res. 2020, 100, 102178. [Google Scholar] [CrossRef]
- Ma, Z.; Wang, S.; Wang, Y.; Ren, N.; Zhai, G. Experimental and numerical study on the multi-body coupling dynamic response of a novel serbuoys-tlp wind turbine. Ocean Eng. 2019, 192, 106570. [Google Scholar] [CrossRef]
- Ma, Z.; Ren, N.; Wang, Y.; Wang, S.; Shi, W.; Zhai, G. A comprehensive study on the serbuoys offshore wind tension leg platform coupling dynamic response under typical operational conditions. Energies 2019, 12, 2067. [Google Scholar] [CrossRef] [Green Version]
- Oyejobi, D.O.; Jameel, M.; Sulong, N.H.R.; Khan, N.B. Investigation of tendon dynamics effects on tension leg platform response in random seas. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2018, 233, 1082–1102. [Google Scholar] [CrossRef]
- Ishihara, T.; Liu, Y. Dynamic response analysis of a semi-submersible floating wind turbine in combined wave and current conditions using advanced hydrodynamic models. Energies 2020, 13, 5820. [Google Scholar] [CrossRef]
- Xiang, T.; Istrati, D. Assessment of extreme wave impact on coastal decks with different geometries via the arbitrary lagrangian-eulerian method. J. Mar. Sci. Eng. 2021, 9, 1342. [Google Scholar] [CrossRef]
- Osuna, P.; Monbaliu, J. Wave-current interaction in the Southern North Sea. J. Mar. Syst. 2004, 52, 65–87. [Google Scholar] [CrossRef]
- Ye, J.H.; Jeng, D.S. Response of porous seabed to nature loadings: Waves and currents. J. Eng. Mech. 2012, 138, 601–613. [Google Scholar] [CrossRef]
- Belibassakis, K.A. A boundary element method for the hydrodynamic analysis of floating bodies in variable bathymetry regions. Eng. Anal. Bound. Elem. 2008, 32, 796–810. [Google Scholar] [CrossRef]
- Tsui, Y.Y.; Huang, Y.C.; Huang, C.L.; Lin, S.W. A finite-volume-based approach for dynamic fluid-structure interaction. Numer. Heat Tranf. B Fundam. 2013, 64, 326–349. [Google Scholar] [CrossRef]
- Xiang, T.; Istrati, D.; Yim, S.C.; Buckle, L.G. Tsunami loads on a representative coastal bridge deck: Experimental study and validation of design equations. J. Waterw. Port Coast. Ocean Eng. 2020, 146, 04020022. [Google Scholar] [CrossRef]
- Westphalen, J.; Greaves, D.M.; Raby, A.; Hu, Z.; Causon, D.; Mingham, C.; Omidvar, P.; Stansby, P.; Rogers, B.D. Investigation of wave-structure interaction using state of the art CFD techniques. Open J. Fluid Dyn. 2014, 4, 18. [Google Scholar] [CrossRef] [Green Version]
- Ren, B.; Jin, Z.; Gao, R.; Wang, Y.; Xu, Z. SPH-DEM modeling of the hydraulic stability of 2D blocks on a slope. J. Waterw. Port Coast. Ocean Eng. 2014, 140, 04014022. [Google Scholar] [CrossRef]
- Hasanpour, A.; Istrati, D.; Buckle, L. Coupled SPH–FEM modeling of tsunami-borne large debris flow and impact on coastal structures. J. Mar. Sci. Eng. 2021, 9, 1068. [Google Scholar] [CrossRef]
- Palm, J.; Eskilsson, C. Mooring systems with submerged buoys: Influence of buoy geometry and modelling fidelity. Appl. Ocean Res. 2020, 102, 102302. [Google Scholar] [CrossRef]
- Lee, H.H.; Wang, P.W. Analytical solution on the surge motion of tension-leg twin platform structural systems. Ocean Eng. 2000, 27, 393–415. [Google Scholar] [CrossRef]
- Lee, H.H.; Wang, W.S. Analytical solution on the dragged surge vibration of tension leg platforms (TLPS) with wave large body and small body multi-interactions. J. Sound Vibr. 2001, 248, 533–556. [Google Scholar] [CrossRef]
- Chai, Y.T.; Varyani, K.S.; Barltrop, N.D.P. Three-dimensional lump-mass formulation of a catenary riser with bending, torsion and irregular seabed interaction effect. Ocean Eng. 2002, 29, 1503–1525. [Google Scholar] [CrossRef]
- Allsop, W.; Cuomo, C.; Tirindelli, M. New prediction method for wave-in-deck loads on exposed piers/jetties/bridges. Coast. Eng. 2007, 5, 4482–4493. [Google Scholar]
- Istrati, D.; Buckle, L.; Lomonaco, P.; Yim, S. Deciphering the Tsunami Wave Impact and Associated Connection Forces in Open-Girder Coastal Bridges. J. Mar. Sci. Eng. 2018, 6, 148. [Google Scholar] [CrossRef] [Green Version]
- Yeung, R.W. Added mass and damping of a vertical cylinder in finite-depth waters. Appl. Ocean Res. 1981, 4, 119–133. [Google Scholar] [CrossRef]
- Barltrop, N.D.P. Floating Structures: A Guide for Design and Analysis, 1st ed.; CMPT: London, UK, 1998.
- Mavrakos, S.A.; Chatjigeorgiou, J. Dynamic behavior of deep water mooring lines with submerged buoys. Comput. Struct. 1997, 64, 815–839. [Google Scholar] [CrossRef]
- Ren, N.; Li, Y.; Ou, J. The wind-wave tunnel test of a tension-leg platform type floating offshore wind turbine. J. Renew. Sustain. Energy 2012, 4, 63117. [Google Scholar] [CrossRef]
- Van der Meer, M.; Briganti, R.; Zanuttigh, B.; Wang, B. Wave transmission and reflection at low-crested structures: Design formulae, oblique wave attack and spectral change. Coast. Eng. 2005, 52, 915–929. [Google Scholar] [CrossRef]
- Collins, C.O.; Potter, H.; Lund, B.; Tamura, H.; Graber, H.C. Directional Wave Spectra Observed During Intense Tropical Cyclones. J. Geophys. Res. Oceans 2018, 123, 773–793. [Google Scholar] [CrossRef]
- Istrati, D.; Buckle, L. Tsunami Loads on Straight and Skewed Bridges—Part 2: Numerical Investigation and Design Recommendations; Dept. of Transportation. Research Section: Salem, OR, USA, 2021. [Google Scholar]
- Jiang, B.; Ding, J.; Wu, H.; Jiang, X.; Ye, Q.; Zhang, J. Wave energy resources assessment along Bohai Sea, Yellow Sea and East China Sea. Acta Energ. Sol. Sin. 2017, 38, 6. [Google Scholar]
- Zheng, C.; Zhou, L. Wave climate and wave energy analysis of the South China Sea in recent 10 years. Acta Energ. Sol. Sin. 2012, 33, 1349–1356. [Google Scholar]
- Istrati, D.; Buckle, L. Role of Trapped Air on the Tsunami-Induced Transient Loads and Response of Coastal Bridges. Geosciences 2019, 9, 191. [Google Scholar] [CrossRef] [Green Version]
- Zhai, G.; Zhou, T.; Ma, Z.; Ren, N.; Chen, J.; Teh, H. Comparison of impulsive wave forces on a semi-submerged platform deck, with and without columns and considering air compressibility effects, under regular wave actions. Eng. Appl. Comp. Fluid Mech. 2021, 15, 1932–1953. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value | |
|---|---|---|---|---|
| NREL 5MW | Blade and nacelle mass, kg | 3.5 × 105 | Tower height, m | 90 |
| Wind turbine | Tower mass, kg | 3.5 × 105 | ||
| Serbuoys-TLP | Platform draft, m | 30 | Water depth, m | 170 |
| Buoyancy, N | 5.11 × 107 | Pre-tension, N | 2.94 × 107 | |
| Ixx/Iyy/Izz/ × 109 kg·m2 | 4.5/4.5/0.5 | Tendon diameter, m | 1.2 | |
| Tendon density, kg·m−3 | 7850 | Elastic modulus, Pa | 2.11 × 1011 | |
| Spoke design, m | L = 20; A = 4 × 4 | Water density, kg·m−3 | 1025 | |
| Buoy | Buoy height, m | 10 | Buoy radius, m | 5.65 |
| Displacement, kg | 4 × 250,000 |
| Number of Tendon Segments (n) | Time to Solve (s) |
|---|---|
| 2 | 28 |
| 6 | 453 |
| 10 | 1144 |
| 14 | 2330 |
| 18 | 3780 |
| Groups | Current Velocity (U)/ms−1 | Wave Height (H)/m | Wave Period (T)/s |
|---|---|---|---|
| Group A (6) | 0; 0.2; 0.4; 0.6; 0.8; 1; 2; 3; 4 | 2 | 9 |
| Group B (10) | 0; 1 | 2; 4; 6; 8; 10 | 9 |
| Group C (10) | 0; 1 | 2 | 8; 9; 10; 11; 12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Z.; Lou, Z.; Zhai, G.; Li, J. Surge Response Analysis of the Serbuoys-TLP Tension Leg Platform under the Action of Wave–Current Coupling. J. Mar. Sci. Eng. 2022, 10, 571. https://doi.org/10.3390/jmse10050571
Ma Z, Lou Z, Zhai G, Li J. Surge Response Analysis of the Serbuoys-TLP Tension Leg Platform under the Action of Wave–Current Coupling. Journal of Marine Science and Engineering. 2022; 10(5):571. https://doi.org/10.3390/jmse10050571
Chicago/Turabian StyleMa, Zhe, Zhehan Lou, Gangjun Zhai, and Jiakang Li. 2022. "Surge Response Analysis of the Serbuoys-TLP Tension Leg Platform under the Action of Wave–Current Coupling" Journal of Marine Science and Engineering 10, no. 5: 571. https://doi.org/10.3390/jmse10050571