1. Introduction
The surface waves are ubiquitous along with the air-water interface, which are primarily driven by the wind [
1,
2,
3] and play an important role in oceans [
4,
5]. The surface waves could affect the air-sea momentum transport, heat transfer across the interface, and mix the upper ocean boundary layer [
6]. It is interesting to estimate forces induced by ocean currents and surface waves on immersed solid structures in fluid mechanics [
7,
8]. This is also of practical use in ocean engineering, e.g., estimating the forces and moments on the offshore structure by surface waves accurately during the designing stage could avoid potential casualties and economic losses.
Morison et al. [
1] analyzed the forces by unbroken small-amplitude surface waves on a cylindrical pile extending from the bottom upward above the wave crest and showed that the force exerted on a differential section
of the cylindrical pile could be decomposed into two components, a virtual mass force proportional to the horizontal local acceleration and a drag force proportional to the square of horizontal velocity,
where
is the density of fluid,
D the diameter of the cylinder,
u the horizontal velocity,
and
are the coefficients of inertial and drag components. This equation is expected to be valid if the diameter of the pile,
D is much less than the wave length
L,
, so the incident wave field is not disturbed and the existence of the pile can be neglected. The values of coefficients
and
were determined by laboratory measurements at selected time steps and the overall performance of the empirical formula was confirmed [
1]. Morison equation has been adopted as a standard method in industry for calculating forces by surface waves on slender offshore structures. The Morison equation has also been used in recent years for estimating forces induced by internal solitary waves on offshore structures [
9], the wave-induced velocity could be either derived from measurements [
10] or the results of a numerical model [
11], some studies showed that the total acceleration should be used in Morison equation for internal solitary wave scenario as nonlinearity could not be neglected [
12,
13], these studies also suggest that layer dependent empirical coefficients are recommended as the flow field are quite different between the upper and lower layers [
14].
Sarpkaya [
15] systematically measured the forces on the smooth cylinder in a U-shaped oscillating-flow tunnel, and concluded that the inertial and drag coefficients were functions of Reynolds and Keulegan–Carpenter numbers. Sarpkaya [
16] studied the force coefficients in planar oscillatory flows of small amplitude, and compared the results with theoretical values derived by Stokes [
17] and Wang [
18], the analysis showed that the coefficients were in good agreement with Stokes–Wang’s result for attached and laminar flow conditions, while the coefficients deviated abruptly from their theoretical prediction above a critical Keulegan–Carpenter number at which the vortical instability occurs.
While the first harmonic force on a vertical cylinder is considered well-defined [
19], several authors have recently discussed the so-called ‘secondary load cycle’, a strongly nonlinear phenomenon regarding the wave loads on a vertical cylinder, rather extensively [
20,
21,
22,
23,
24]. The secondary load cycle is an additional short-duration loading with a peak just after the main load peak in the direction of wave propagation. Chaplin et al. [
20] did an investigation on the interaction between the cylinder and non-breaking phase focused wave. The results showed that the second load cycle might have an important effect on ringing response, and the magnitude of the secondary load cycle was highly correlated with wave steepness. Grue and Huseby [
21] discussed experimental observations of a secondary cycle on a vertical cylinder and found that the timing of the load cycle was about one quarter-wave period later than the main peak of the force. Paulsen et al. [
22] found that the formation of secondary load cycles were led by an increase in wave length or wave height. Through visual observation and a simplified analytical model, it was shown that the secondary load cycle was caused by the strong nonlinear motion of the free surface, which drove a return flow at the back of the cylinder following the passage of the wave crest. Kristiansen and Faltinsen [
25] confirmed the existence of this process. Riise et al. [
23] analyzed all harmonics from one to five and found that the theoretically predicted third harmonic loads agreed well with the experiments for small to medium wave steepness. The discrepancy in general increased monotonically with the increasing wave steepness. Fan et al. [
24] showed that the characteristic parameters of the secondary load cycle induced by regular waves of large amplitude depend mainly on relative wave height and relative diameter of the cylinder, while the dependence on relative depth is weak, and concluded that the secondary load cycle was one important factor contributing to the ringing phenomena.
From the above review, it can be seen that in recent years the studies on higher harmonics forces by surface waves have drawn more attention as they can induce resonances in the offshore structures. As nonlinearity is important for higher harmonics, steep regular waves [
22,
24,
25] or irregular waves [
19,
23] are used in these studies. While first-order waves were assumed in Morison et al. [
1], the empirical Morison equation posed there could fit the corresponding laboratory measurements reasonably well, which is now widely accepted in the industry. There arises the question of whether the forces by small-amplitude surface waves on the circular cylinder are well defined by the classical Morison equation, and no further study on this aspect is required. After reviewing the classical paper by Morison et al. [
1], it is found that there are still some issues yet to be addressed, e.g., the uncertainties for drag coefficient (
) are much larger than those for inertial coefficient (
), the moments estimated with Morison equation could fit most of the measured values well, but it is apparent that the maximum moments are not captured by the empirical formula. These two issues are not discussed in the original manuscript by Morison et al. [
1], which could probably be regarded as errors due to uncertainties in laboratory experiments. In this paper, numerical simulations are performed with similar configurations to that by Morison et al. [
1] to explain these two issues.
The remainder of this paper is organized as follows. The classical Morison equation is briefly reviewed in
Section 2. In
Section 3 the numerical model and its configurations are introduced. The results are analyzed and discussed in
Section 4. The major conclusions are drawn in
Section 5.
3. The Numerical Model and Configurations
The Morison equation is now widely used in industry to estimate forces by surface waves on cylindrical structures. However, as pointed out in
Section 1, there are still some issues yet to be addressed, e.g., the larger uncertainties for drag coefficient (
) than inertial counterpart (
) and the underestimated maximum moments as shown in the original manuscript [
1]. As the measured data from that experiment are not accessible, a numerical model with similar configurations is used to reproduce the corresponding laboratory experiment to further analyze the mechanisms for these phenomena. As some key information is not available from the original manuscript, e.g., the size of the wave flume, the location of the cylinder, the details of the physical wave-maker, etc., an exact reproduction of the corresponding laboratory experiment is not possible. The purpose of numerical simulation is, therefore, to reproduce these issues to be addressed with similar configurations as the original laboratory experiment, the results of which could provide comprehensive physical quantities and help understand the reason and mechanism that lead to these issues.
OpenFOAM (Open Source Field Operation and Manipulation) is used for computations in this study. OpenFOAM is an open-source software that is widely used in computational fluid dynamics (CFD). The solver based on Navier–Stokes equations and the Volume of Fluid (VOF) method is used to simulate free-surface flows around the cylinder and calculate the wave loads on structures. The VOF method in OpenFOAM is applied for locating and tracking free surface [
26], each of the two phases is considered to have a separately defined volume fraction
. When the grid cell is empty of water but filled with air, the value of the volume fraction function is 0; when the cell is full of water, it is 1; when the interface cuts the cell or the cell is partially filled with water or air, this function is between 0 and 1. The OpenFOAM solver based on the VOF method has been used to investigate wave loads on cylindrical structures [
22,
24,
27] in recent years, more details on these methods can be found in these references. The CFD-based solvers can capture nonlinearities at the cost of resource-demanding, which restricts the length of analyses for an irregular wave input [
19]. For the present study, the case for a small amplitude regular wave is considered, which significantly reduces the amount of computational resource needed.
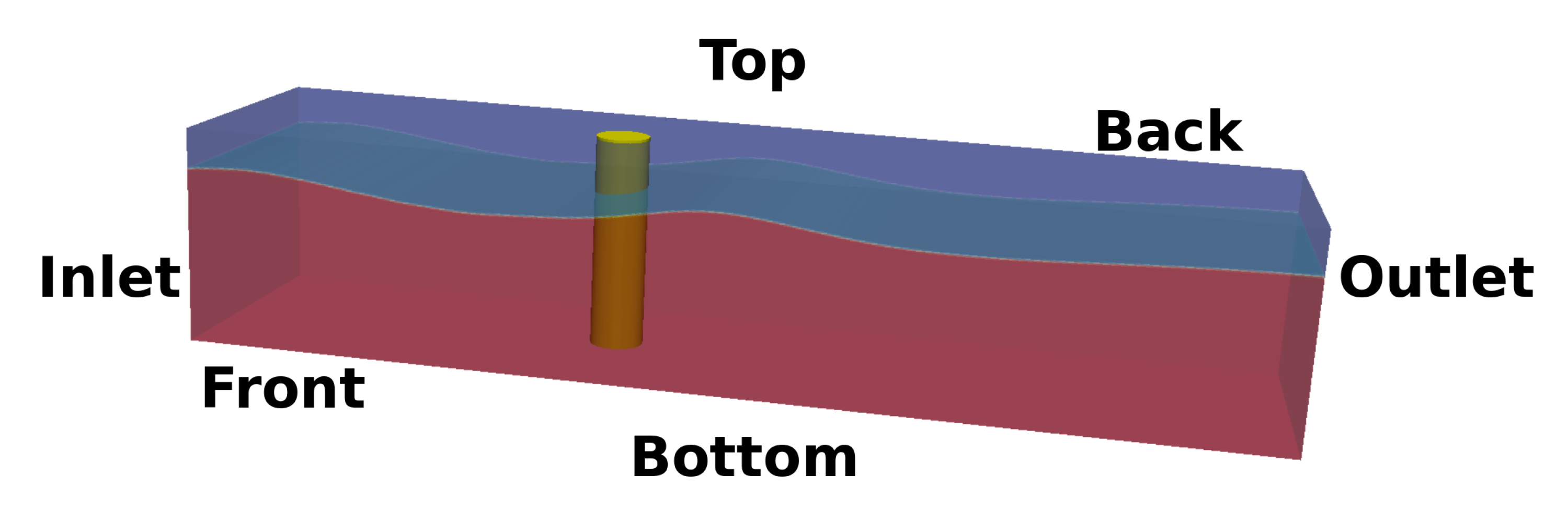
The computational domain is shown in
Figure 1, which is 8 m long and 0.4 m wide, the height is 0.8 m. A circular cylinder with a diameter of 0.025 m is fixed at the centerline and the distance between the cylinder and wave generation boundary is 1 m. The wave period, wave height, wave length, initial still water depth, and cylinder diameter in this study are listed in
Table 1, which are chosen to be close to parameters for corresponding laboratory experiments [
1]. The quantities in
Table 1 are preset in model configuration except for the wave length, which is a derived quantity measured from model results. The wave length derived with linear dispersion relation
is 3.59 m, this minor difference is induced by the assumptions adopted in the theoretical formulation. The wave generation and absorption methods developed by Higuera et al. [
28,
29] and Higuera [
30] are adopted in this study as no relaxation zone is required, which further reduces the amount of computational resource. The
SST two-equation closure model is adopted for turbulence parameterization in this study. A long-standing problem with the VOF method on modeling surface wave dynamics is the severely over-estimated turbulence level along with the phase interface, which dissipates the wave energy significantly and the wave shape could not be maintained. In this study, the modification strategy proposed by Larsen and Fuhrman [
31] is utilized to solve this problem.
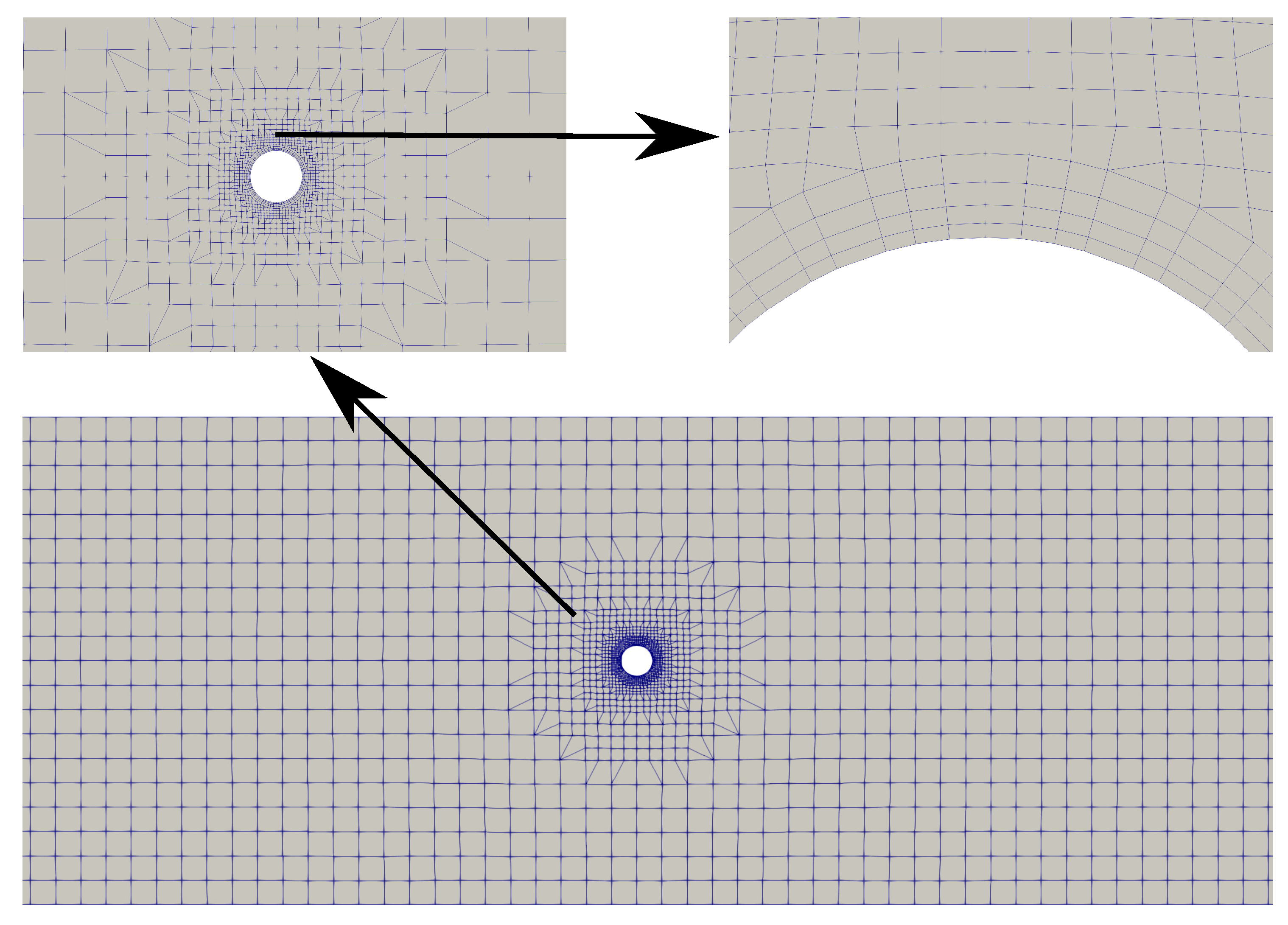
The computational grid topology for a horizontal section is shown in
Figure 2, the background mesh with a side length equal to 0.02 m is used across the domain, and the mesh is gradually refined towards the cylinder. A smooth boundary layer with 60 cells adjacent to the cylinder surface is utilized to calculate the forces and moments for each layer on the cylinder. This plane grid structure is extruded 0.8 m along the
z axis with 160 homogeneous layers to generate the 3D mesh, the grid resolution along the
z direction is 0.005 m, which is fine enough to capture free surface variations. The boundary conditions for the variables in the numerical models are listed in
Table 2.
As shown in
Section 2, the velocity and acceleration at cylinder location were needed in the Morison equation. These data were not available from laboratory experiments [
1], and were derived based on linear wave theory. In order to evaluate the influence of employing this assumption on the determined coefficients, one more numerical simulation is configured to derive velocity and acceleration at cylinder location, the cylinder is removed from the background mesh and no grid refinement is required, the computational domain is divided into cuboid grids with dimensions of 0.02 m × 0.02 m × 0.005 m. The numerical results of velocities and moments are saved every 0.01 s, while other physical quantities are output every 0.05 s to save the storage resources.
4. Result Analysis
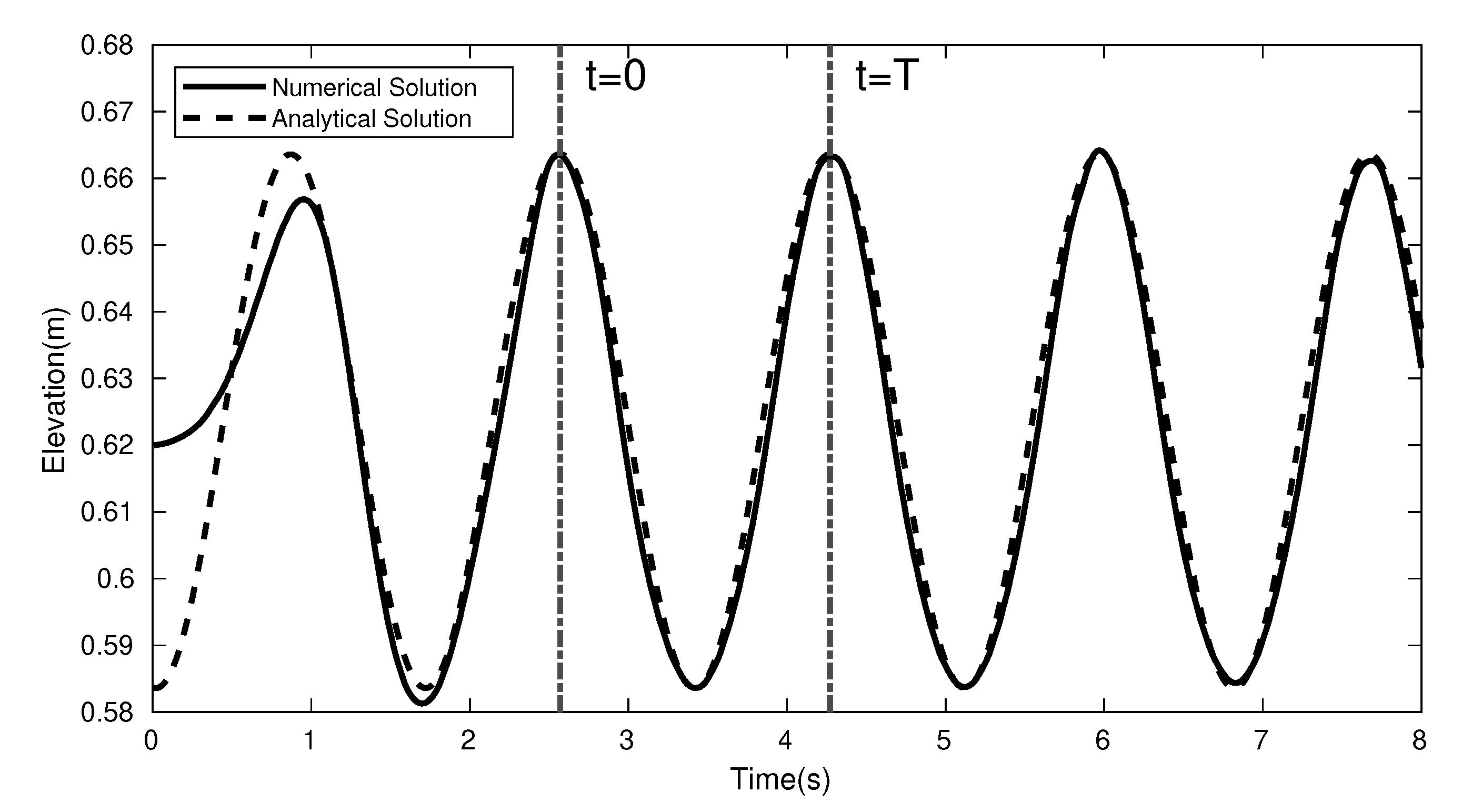
The numerical results are analyzed in this section. The temporal evolution of surface elevations at cylinder location are shown in
Figure 3. The analytical solution based on linear wave theory
is also plotted for comparison. The analytical solution is translated in time to be in phase with the numerical solution. It can be seen that after the startup duration of about 1 s, the temporal evolution of surface elevations at cylinder location fit the analytical solution reasonably well, which confirms the assumption of the linear wave for this configuration. The two vertical lines mark time steps 2.57 s and 4.27 s, which are designated as
and
respectively. The wave phases for these two time steps are assigned as
and
for later discussion, the minus sign is introduced as the wave phase decreases with increasing time for fixed location
. The velocity and moment data within this specific period are further analyzed in this section.
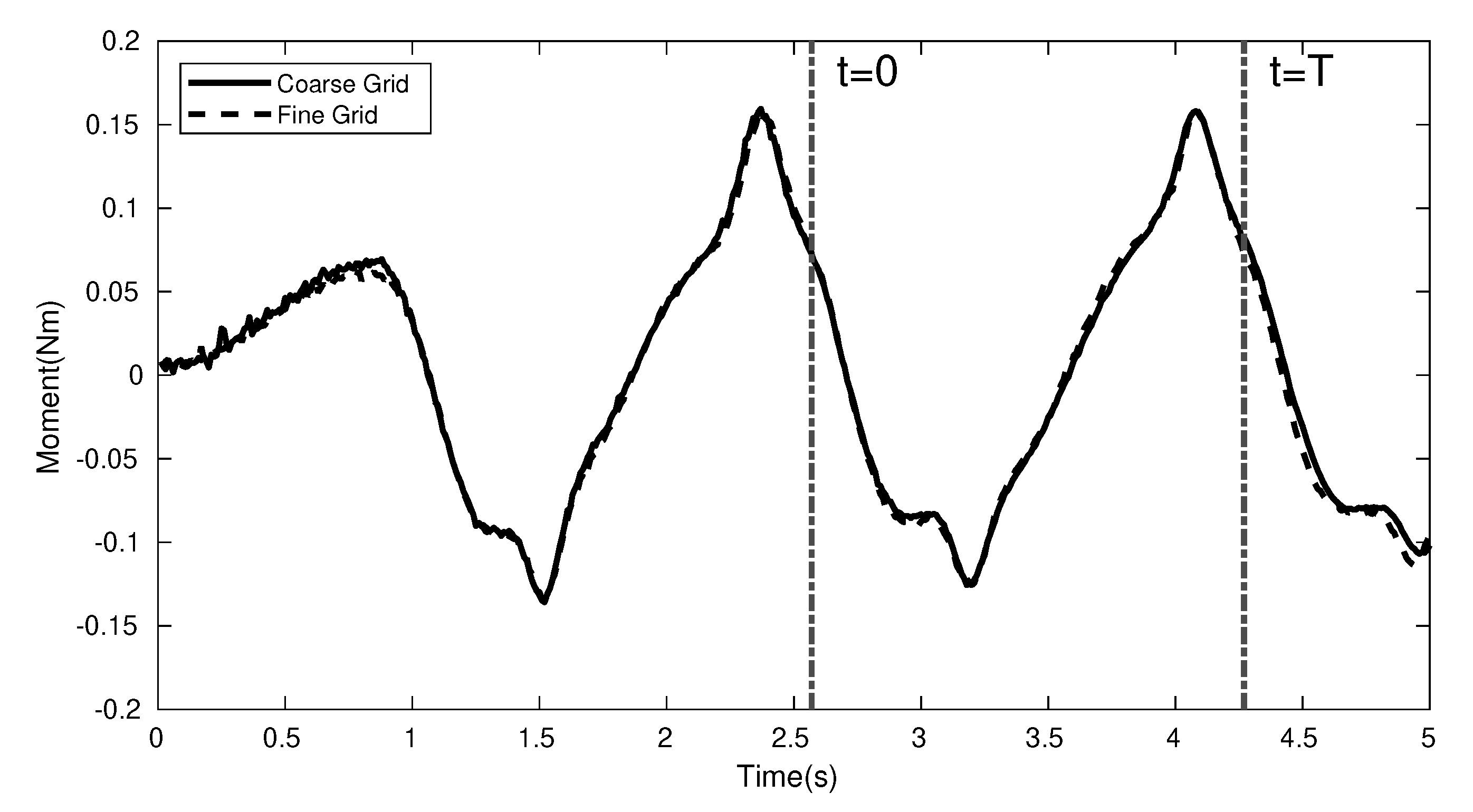
The moments exerted by surface waves on the cylinder are calculated directly with a numerical model and shown in
Figure 4. The forces and moments on a rigid structure by fluid motion are known to be very sensitive to the thickness of mesh adjacent to the structure surface. A mesh sensitivity study is performed to check the validity of chosen mesh. Two meshes with similar topology are used, the difference lies in that the thickness of grids adjacent to the cylinder for one mesh is half of that for another mesh, the boundary layer thicknesses close to the cylinder for these two cases are 0.25 mm and 0.5 mm, respectively, these two meshes are referred to as fine mesh and coarse mesh respectively. From
Figure 4 it can be seen that the temporal evolution of moments are independent of the meshes chosen and the numerical results can be used for further analysis.
The coefficients
and
are determined from numerical results with the method proposed by Morison et al. [
1] as mentioned in
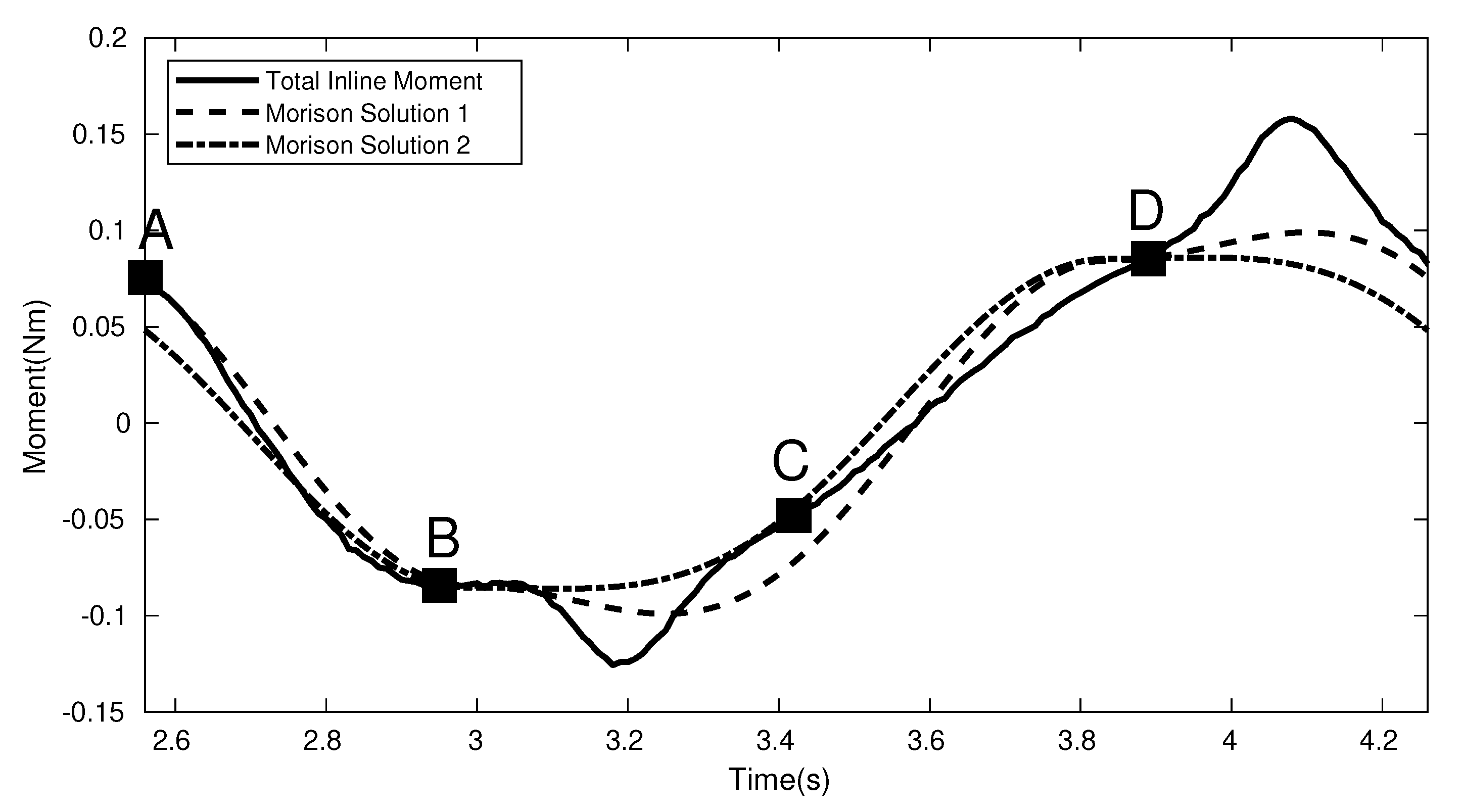
Section 2. The moment values at four specific phases within one period are selected, which corresponds to wave phases
, these positions are marked as points A, B, C, and D in
Figure 5 respectively. The empirical coefficients are derived with Equations (
8) and (
9), the values are listed in
Table 3. The missing values in the table for the empirical coefficients are introduced as the terms with those coefficients are zero at specific positions, e.g., for positions A and C, the terms including inertial coefficient
are zero, only the drag coefficient could be derived. These results could be rewritten in the form of average values with uncertainties,
and
. It can be seen that the phenomenon observed in the original manuscript by Morison et al. [
1] is reproduced, namely, the uncertainties for drag coefficient are much larger than those for inertial coefficient. Before exploring the reason for this discrepancy, the temporal evolution of predicted moments with Equation (
5), is shown in
Figure 5 to estimate the accuracy of the Morison equation. As coefficients
and
are needed in the Morison equation, two sets of combinations are used to illustrate their influence on the results. The solution 1 is predicted by the Equation (
5) with coefficients
and
determined from positions A and B, respectively, while the solution 2 is based on the same equation and the corresponding coefficients for positions C and D. Since the inertial coefficients
derived from positions B and D are very close, the differences between solution 1 and 2 are predominately induced by the distinct values of drag coefficients. From
Figure 5 it can be seen that the predictions with drag coefficient determined by moment value at position A fail to fit the moment value at position C and vice versa. Although both solutions could predict the general trend of calculated moments, some gaps between the predictions and true values are evident, and the extreme value for moments is obviously underestimated by the empirical equation, which is also observed in the original manuscript [
1]. It is beneficial to analyze whether these discrepancies could be reduced or the influences of assumptions employed on the predictability of the Morison equation, which could further help improve empirical equation.
One key assumption used by Morison et al. [
1] is that the waves can be treated as small-amplitude waves and the nonlinearity could be omitted, which could be partially confirmed from the comparison of surface elevations as shown in
Figure 3. It should be noted for linear wave theory that the surface elevation is assumed to be negligibly small that its temporal variations can be neglected for other physical quantities; this significantly simplifies the theoretical formulation, without which analytical solution could not be obtained. With this assumption, the upper boundary for theoretical wave parameters, e.g., the orbital velocity, is shifted from free surface
to
. This can also be discerned in Equation (
4), the total moment is derived by integrating the corresponding value for each differential section from bottom to initial still surface, although the free surface oscillates periodically.
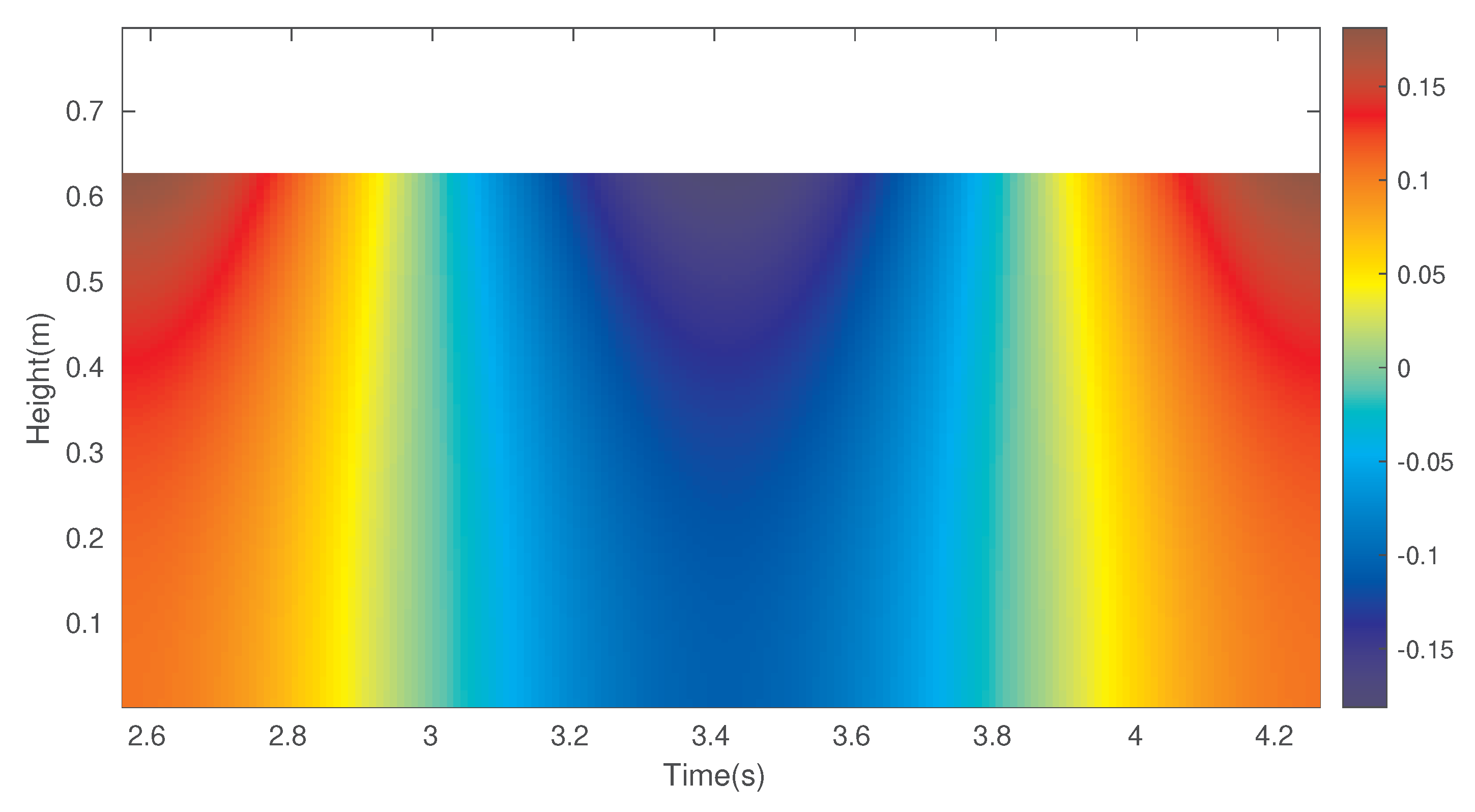
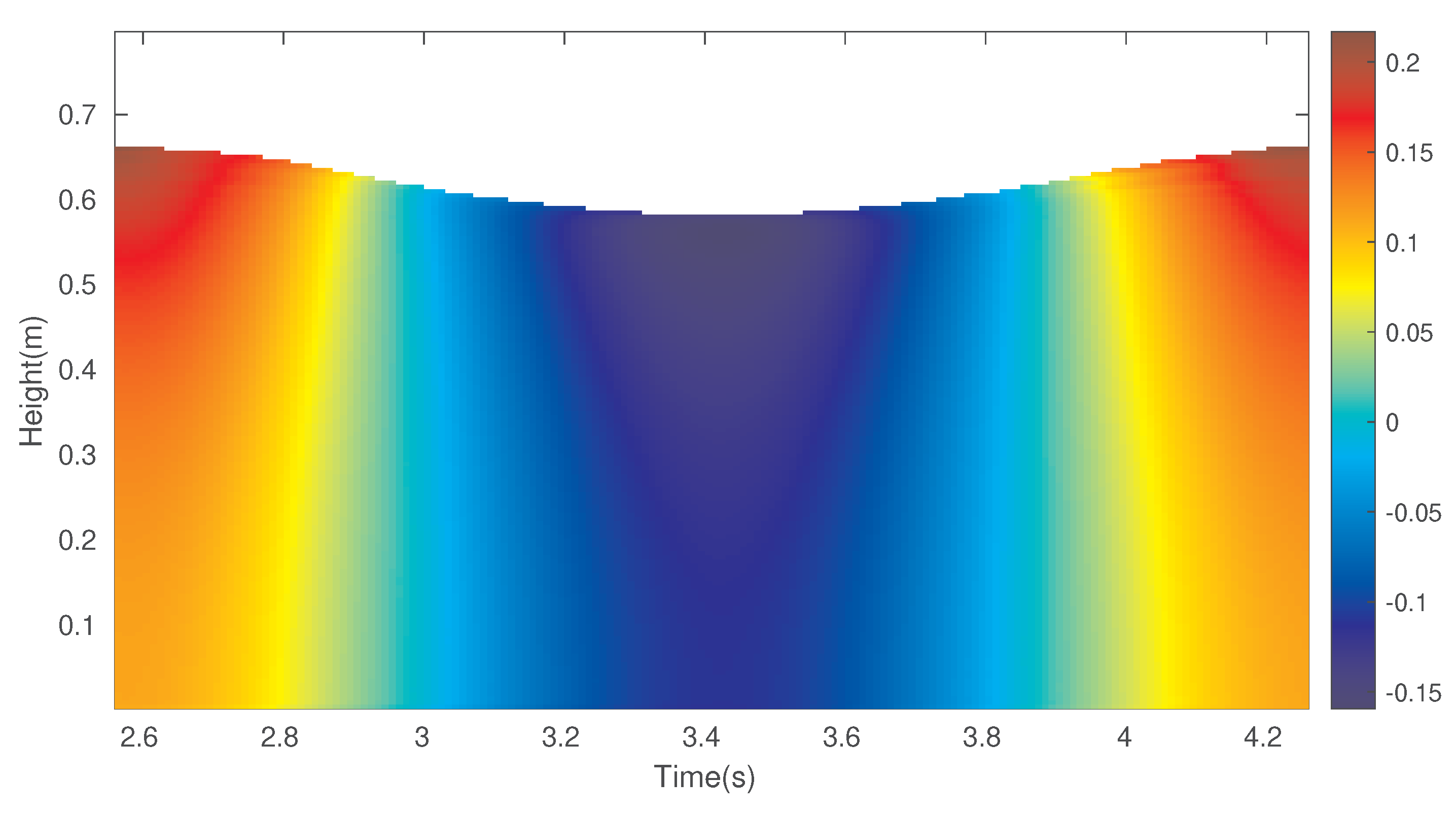
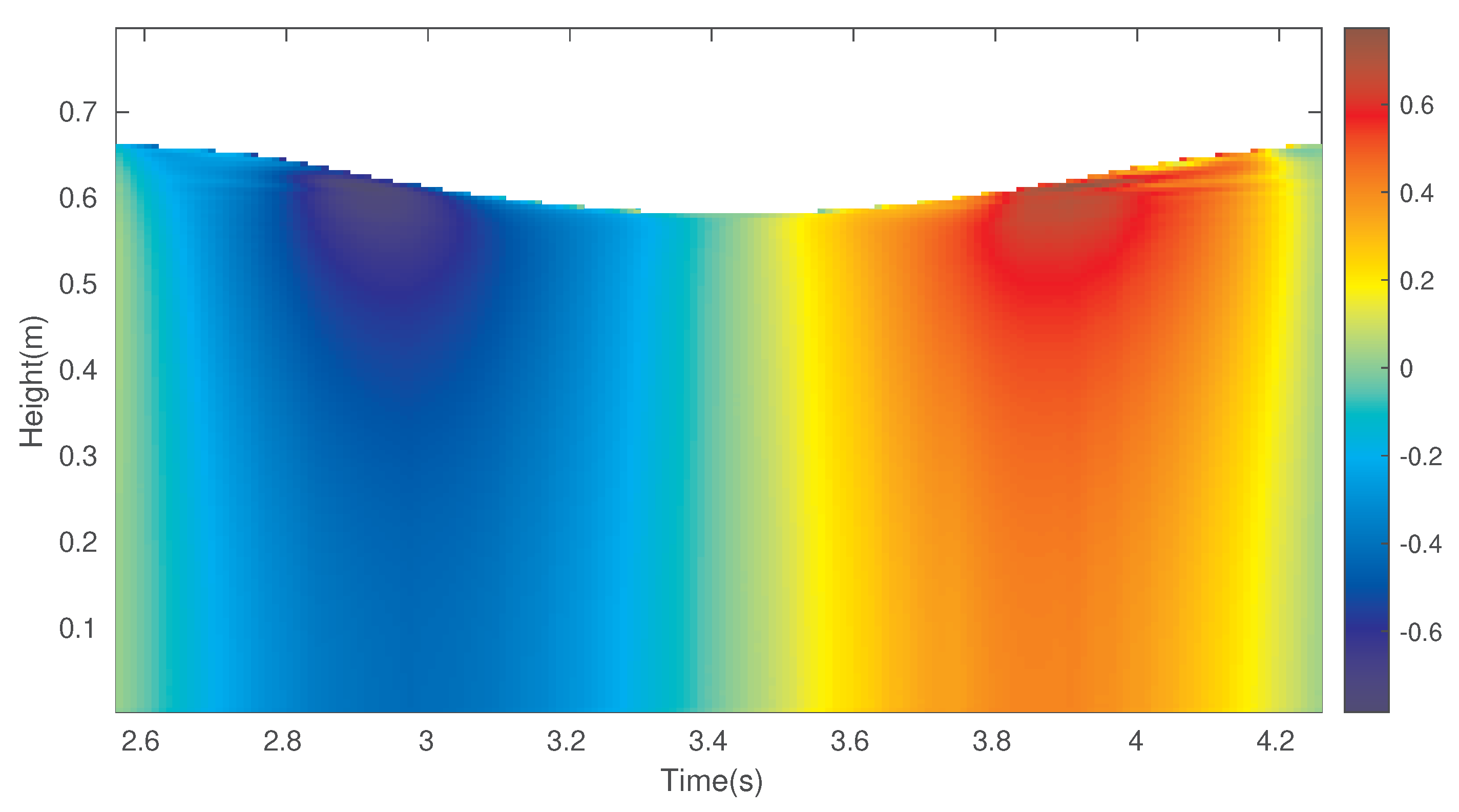
The introduction of linear wave theory is to estimate velocity and acceleration field at cylinder location, which are not available from laboratory experiments, the numerical model can also be used to estimate velocity field and evaluate the accuracy of linear wave theory. An accompanying numerical simulation without cylinder is performed to get the corresponding velocity and acceleration field at cylinder location. The temporal evolution of theoretical and numerical velocity field for one period are shown in
Figure 6 and
Figure 7. It can be seen that the theoretical formulation (Equation (
2)) could depict the general trend of the velocity field reasonably well, except for regions around the free surface. The theoretical expression for velocity field neglects free surface oscillations, which could potentially introduce errors at wave crest and trough, where the drag coefficient
is determined.
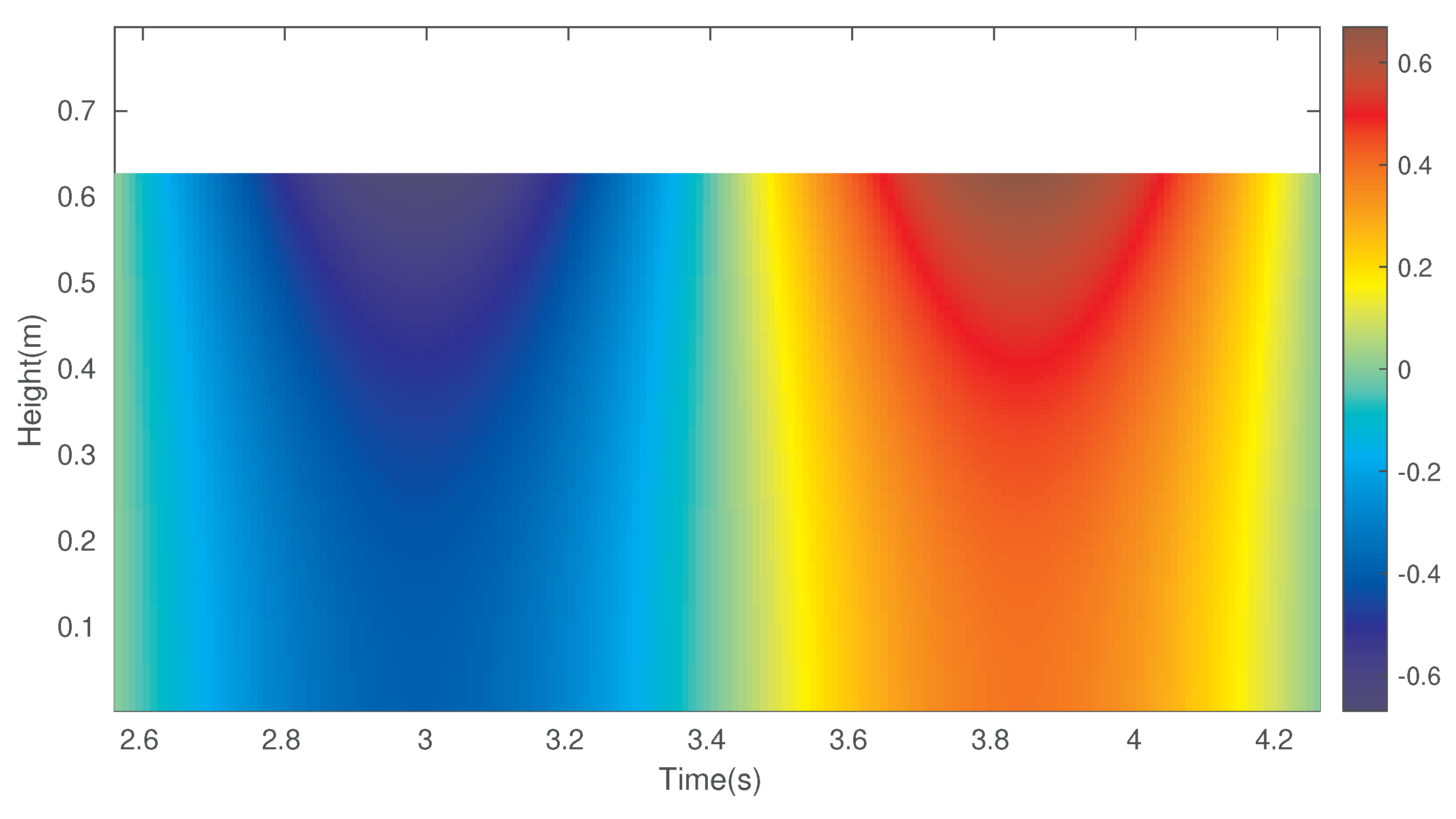
The temporal evolution of theoretical and numerical acceleration fields for one period are shown in
Figure 8 and
Figure 9. The key differences for these two fields also mostly lie around free surface regions. The acceleration data at phases
and
are used to derive inertial coefficient
, as the actual surface elevations at these two moments are the same as initial still water, the uncertainties for inertial coefficients are relatively smaller. This partially explains why the uncertainties in drag coefficient are larger than those in inertial coefficients with theoretical velocity and acceleration field.
From the above analysis, it can be seen that the theoretical formulations of velocity and acceleration neglect the influence of surface elevations, which could introduce larger uncertainties in the empirical coefficients and predictability of the Morison equation. The numerical solution for velocity field at cylinder location takes this into account and could be used as an alternative for the coefficients determination. The moments for these four-wave phases can be expressed as,
The oscillations of free surface are taken into account in the determination of drag coefficient
. The integration on the right hand side of these equations could be approximately expressed as algebraic summation of the corresponding discretized variables, e.g.,
where
k is the grid index in the vertical direction,
n is the time index,
is the time step, which is 0.01 s for the velocity,
is the grid space in the vertical direction, which is equal to 0.005 m. The summation index
k starts from the bottom cell to the top cell that is cut by the free surface. After the coefficients
and
are fixed, the temporal evolution of moments could be predicted as,
The coefficients
and
determined with the numerically derived velocity and acceleration field are shown in
Table 4, from which it can be seen that the uncertainties in drag coefficient are significantly reduced,
, although they are still larger than those for inertial coefficient
. The linear wave theory is assumed in the coefficients determination method proposed by Morison et al. [
1], the applicability of this method for other wave scenarios, e.g., nonlinear waves or irregular waves, is thus very limited. The least squares method (LS) is one widely used alternative for empirical coefficients determination [
32], which is also tested here for reference. All the data are taken into account with the least-squares method and the minimum mean squared error between model predictions and measurements is used as a metric to fix the coefficients. From
Table 4 it can be seen that larger drag and inertial coefficients are derived with the LS method. Other coefficient determination methods, such as the Fourier average, are adopted by Sarpkaya [
15], which can only be used for two-dimensional oscillating flows, are not discussed in this study.
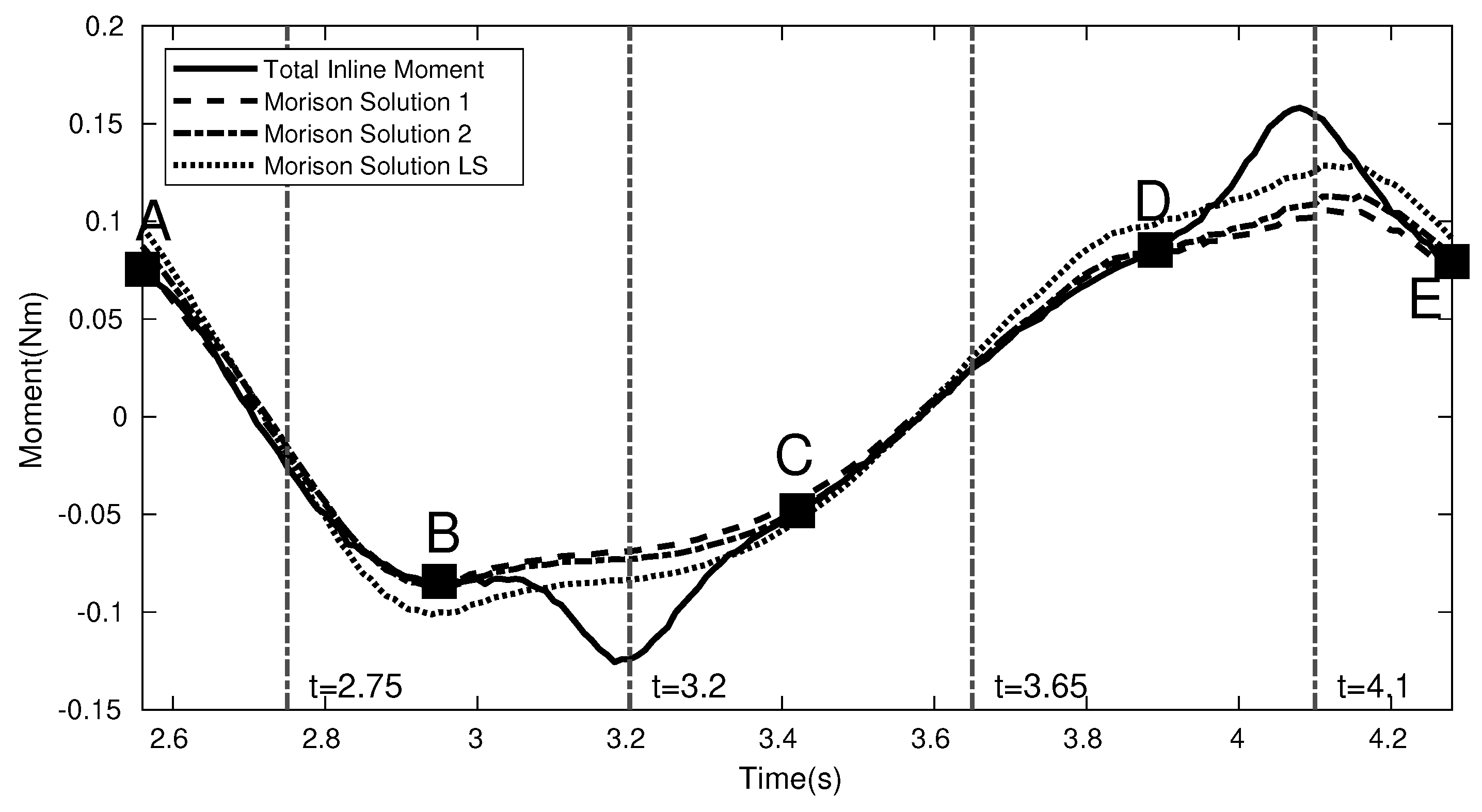
The temporal evolution of moments predicted by Equation (
15) with three different combinations of empirical coefficients and the directly calculated moments are compared in
Figure 10. The drag coefficient determined by position A and the inertial coefficient determined by position B are employed by solution 1, the corresponding coefficients for positions C and D are used by solution 2, while the coefficients determined by the least-squares method are utilized by solution LS. It can be seen that solutions 1 and 2 are very close to each other, more specifically, solution 1 could fit the moments at positions C and D reasonably well; this is also true for solution 2 at positions A and B, which exhibits superior performance than those shown with the theoretical formulation in
Figure 5. However, there exhibit obvious distinctions between these two solutions and calculated moments for different wave phases. These two solutions could fit the calculated moments quite well for some phase ranges, e.g., ranges A–B and C–D, while significant discrepancies exist for other phase ranges, e.g., ranges B–C and D–E. The solution LS is anticipated to perform better as the coefficients are determined by minimizing the differences between predictions and true values. The solution LS with larger drag and inertial coefficients could predict higher maximum moment values, however, there still exist significant discrepancies between predictions and true moments. Furthermore, the solution LS fails to fit most of the selected positions, e.g., positions A, B and D.
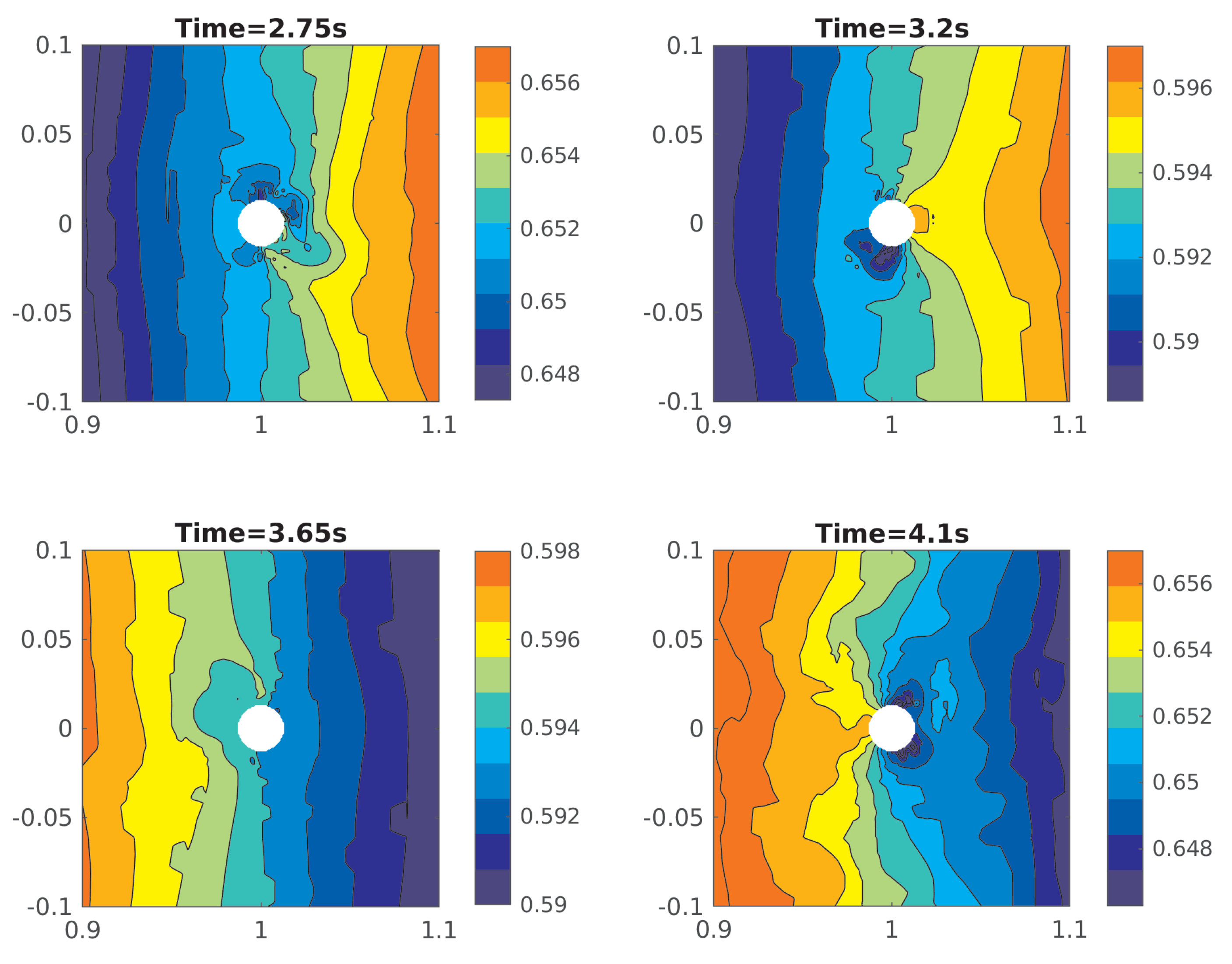
The numerical data at four times (
s, 3.2 s, 3.65 s, and 4.1 s) are chosen to investigate the mechanism for this phenomena further. The surface elevations around the cylinder for these four times are shown in
Figure 11. The surface elevations are derived by calculating vertical coordinates of isosurface
with linear interpolation and these elevations are then mapped to one regular grid with bilinear interpolation. It can be seen that for the times
2.75 s and 3.65 s, the isolines of the free surface around the cylinder location are approximately parallel to those away from it, although some noises exist around the cylinder, which could be induced by weak wave-cylinder interactions. This confirms the assumption that the surface wave is not disturbed by the cylinder, and the predictions with the Morison equation could fit the calculated moments quite well. The surface elevations for the other two times
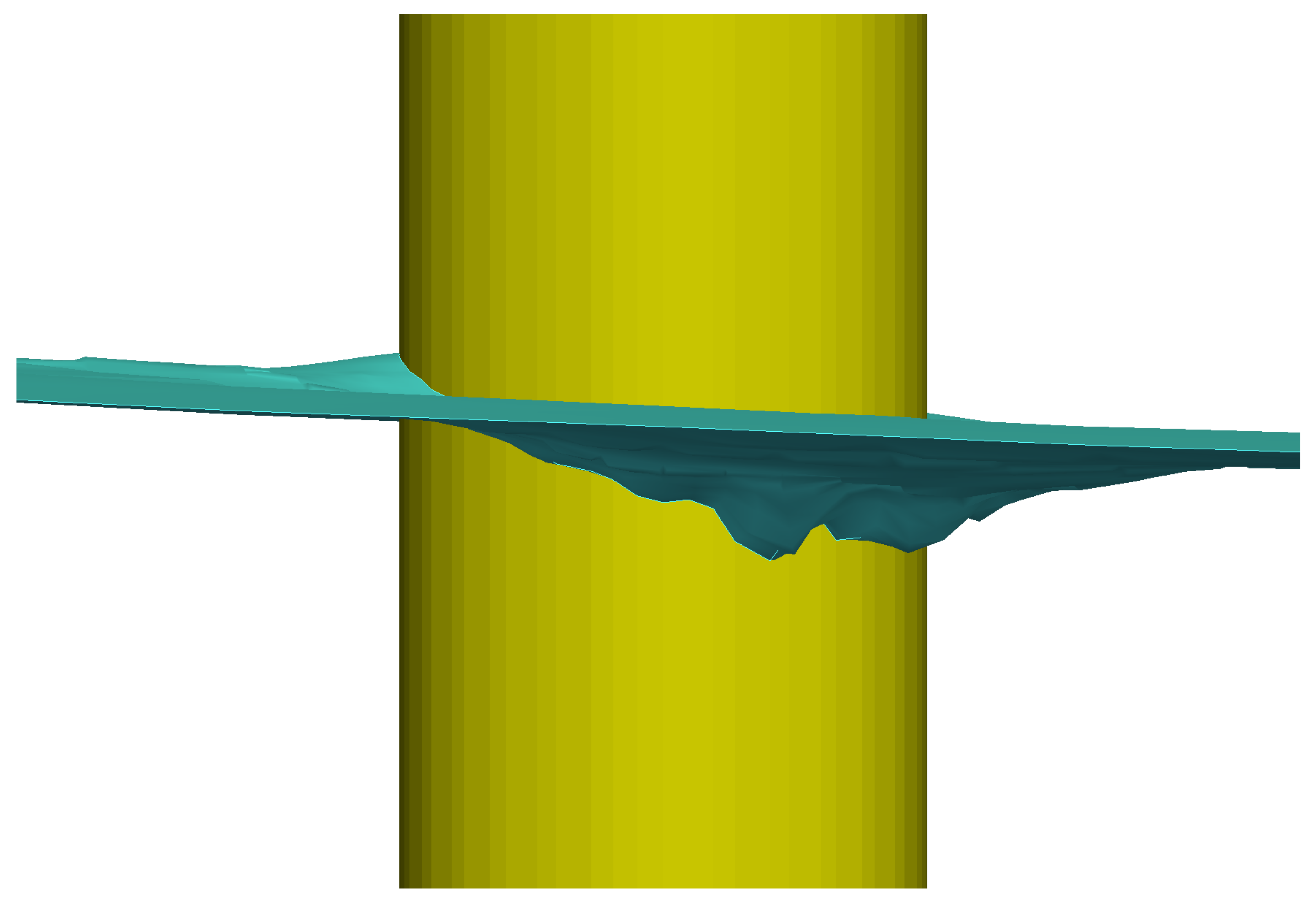
3.2 s and 4.1 s, however, exhibit distinct characteristics, the isolines of the free surface around the cylinder are out of shape, resulting in wave run-up on one side of the cylinder. The wave run-up phenomenon is induced by the existence of a cylinder, which could be discerned as an elevated water surface as the local flow is blocked by obstacles as shown in
Figure 12.
These wave run-up processes produce additional local forces and moments on the cylinder, which could explain the discrepancies between predictions by the Morison equation and directly calculated values, as the wave run-up process is not taken into account in the Morison equation. The physical mechanism for wave run-up could be readily explained. For the time ranges B–C and D–E, the wave induced velocity and acceleration field at cylinder location are in the same direction, in other words, the water particles are moving towards cylinder with increasing velocity, the wave-cylinder interaction, or blocking effect by cylinder produces an additional amount of elevated water adjacent to the cylinder. For the time ranges A–B and C–D, the velocity and acceleration at cylinder location are in opposite directions, the water particles move towards cylinder with decreasing velocity, the wave run-up is not generated or negligibly small for this scenario. As a short summary, the local wave run-up process results in an additional loading on the cylinder, the scale of which is approximately the diameter of the cylinder, as can be discerned in
Figure 11.
Morison et al. [
1] proposed that if the diameter of the pile is much less than the wave length,
, the incident wave field could be treated as not being disturbed and the existence of the cylinder can be neglected. The ratio of cylinder diameter to wave length for the present configuration is about 0.007, which is one order of magnitude smaller than the criterion assumed by Morison et al. [
1]. The numerical results show that for such a small cylinder, the influence of the cylinder on wave field is quite small, except for a region adjacent to the cylinder with a scale of cylinder diameter. Although the length of this region is significantly smaller than the wave length, the influence by local wave run-up could not be neglected as the integrated wave loads highly depend on the flow field adjacent to the cylinder.
This is not the first manuscript that notices the influences of local wave surface distortions on the forces and moments exerted on the cylinder. Several previous studies have noticed these phenomena, which are expected to cause high-frequency loads on the cylinder [
19,
20,
23,
25], although different terms are used to describe this, e.g., ‘mound’ [
20] or ‘upwelling’ [
25]. Previously this phenomenon is primarily studied for nonlinear waves, e.g., fifth-order Stokes waves [
25] and irregular waves [
19,
20,
23,
33,
34]. The cylinder diameters in these studies are also much larger than that in this study, e.g., the minimum non-dimensional radius
in the experiments by Li et al. [
33,
34] is 0.32, while the quantity from the present study is 0.023. In this study, it is found that the wave run-up process also exists for linear waves, and the scale of this phenomenon is approximately cylinder diameter, as shown in
Figure 11, which is the same as those observed for nonlinear waves [
19,
23,
25]. The frequencies of local wave run-up, however, are different among these scenarios. For nonlinear waves, the local wave run-up is only prominent at one side of the cylinder and occurs once per period, which can be explained as the incident velocity at the free surface is quite different if there comes an incident wave crest or wave trough [
25]. For the linear wave scenario, the differences between incident velocity accompanied with wave crest and trough are marginal, the wave run-up could exist at both sides of the cylinder, and their magnitudes are comparable, two wave run-up processes can be observed within one period.
MacCamy and Fuchs [
35] analyzed the wave forces on the pile with a diffraction theory, the assumption adopted therein was very close to the configurations of this study, e.g., the small ratio of wave height to its length, the diameter of the cylinder was small compared to the wave length. Large deviations exist between the theoretical predictions and experimental results. The reason for this rather large discrepancy was discussed and attributed to the inviscid fluid assumption, the fluid motion was symmetrical around the cylinder and no separation occurred, resulting in zero drag contribution.
It can be seen from
Table 4 there exist distinct discrepancies between the empirical coefficients derived with different methods for one set of measurements, which are also confirmed for irregular waves [
32]. For the two methods used in the present study, e.g., the method proposed by Morison et al. [
1] and the widely used least-squares method, it is beneficial to discuss the pros and cons of these two methods. The least squares method is the best choice if mean squared error is used as the metric, however, as certain physical process, e.g., wave run-up, is not taken into account in Morison formula, the coefficients are unavoidably influenced by the unresolved process. The coefficients derived with this method perform better for the available data, but their generalization for unseen data is not reliable. For the alternative method proposed by Morison et al. [
1], the data at selected times are used to fix drag and inertial coefficients when the wave run-up effects are negligibly small. The coefficients derived with this method behave better than those inferred with least-squares counterpart for the temporal ranges when wave run-up is relatively small and fail to fit the true values when wave run-up dominates, as shown in
Figure 10.
Morison equation has now widely accepted in the industry to estimate wave loads on cylinder structure, although the coefficients proposed in the original manuscript are seldom used. Sarpkaya [
15] proposed that the inertial and drag coefficients were functions of Reynolds and Keulegan–Carpenter numbers, however, it should be noted that their coefficients were based on measurements in a U-shaped oscillating-flow tunnel, wherein surface elevations were suppressed. In industry standard, e.g., American Petroleum Institute (API) Recommended Practice, constant values for the coefficients are suggested for realistic scenarios,
and
, which are close to the results by Sarpkaya [
15] for high Reynolds numbers. The wave run-up processes are therefore not taken into account with these coefficients, which could potentially underestimate realistic forces and moments.
Recently Zan and Lin [
12] examined the applicability of the Morison equation on the force estimation by internal solitary waves on cylindrical structure, and found that the total acceleration should be used as the nonlinearity could not be neglected. The significance of nonlinearity is also evaluated for this study, which is indeed negligibly small and the result is not shown for brevity.
Lastly, it should be noted that moments were measured in Morison et al. [
1], in later studies, the forces on cylinder could also be readily measured. The theoretical formula for integrated forces is much simpler than that for integrated moments. Similar conclusions could be drawn if the forces are used to determine the empirical coefficients and are not shown here for brevity. The moments are used in this study to make it consistent with the study by Morison et al. [
1].
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}