
Adaptive Disturbance-Observer-Based Continuous Sliding Mode Control for Small Autonomous Underwater Vehicles in the Trans-Atlantic Geotraverse Hydrothermal Field with Trajectory Modeling Based on the Path


Abstract
:1. Introduction
- (1)
- An adaptive observer-based trajectory tracking control method is proposed. It is proved that tracking errors of S-AUVs can converge to the residual set in a fixed time.
- (2)
- We design an adaptive FTESO to estimate the lumped uncertainties and realize the self-adaption of observer parameters. Compared with Ref. [28], the upper bound of lumped uncertainties and its gradient need not to be known in the observer design.
- (3)
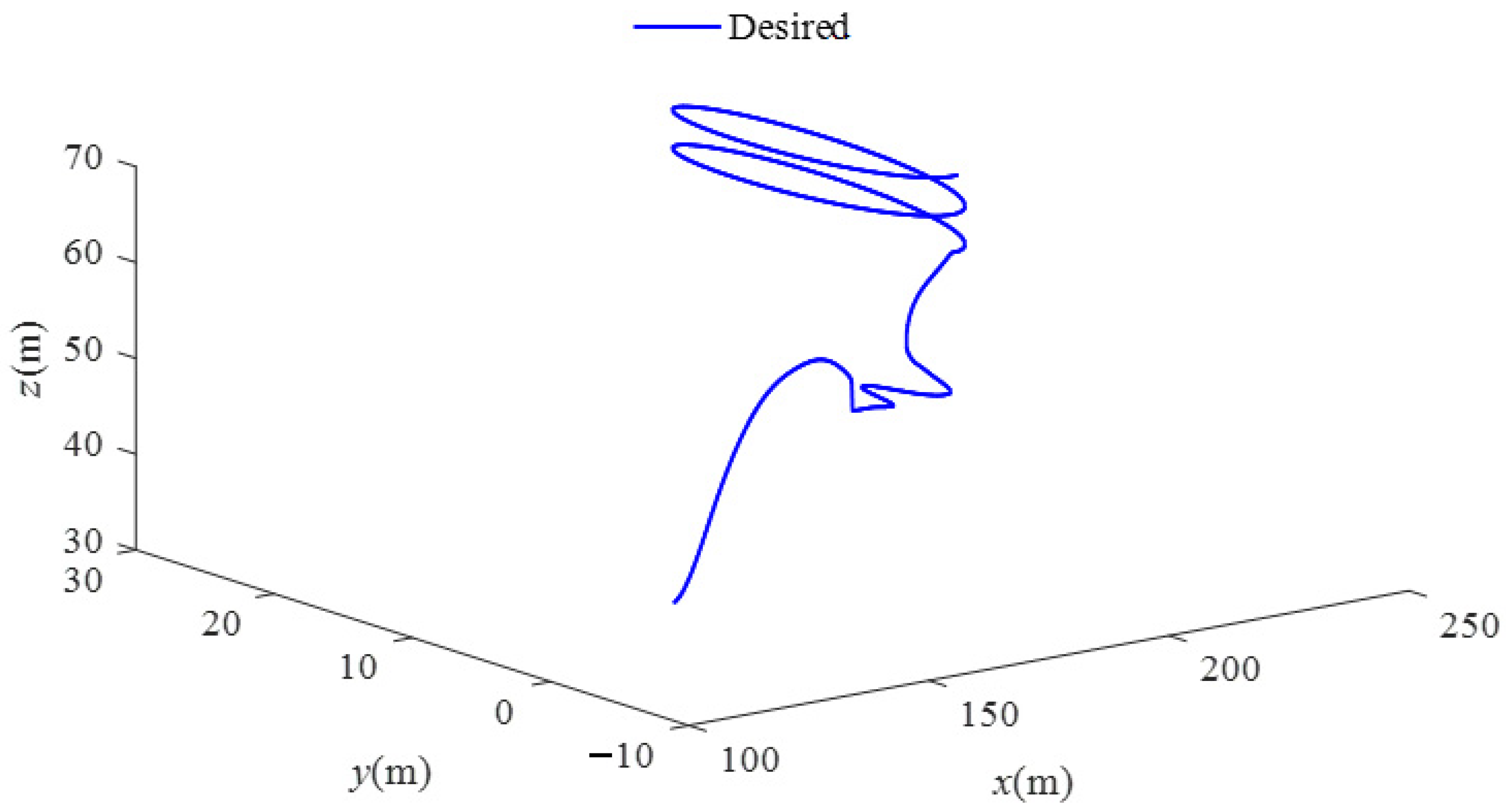
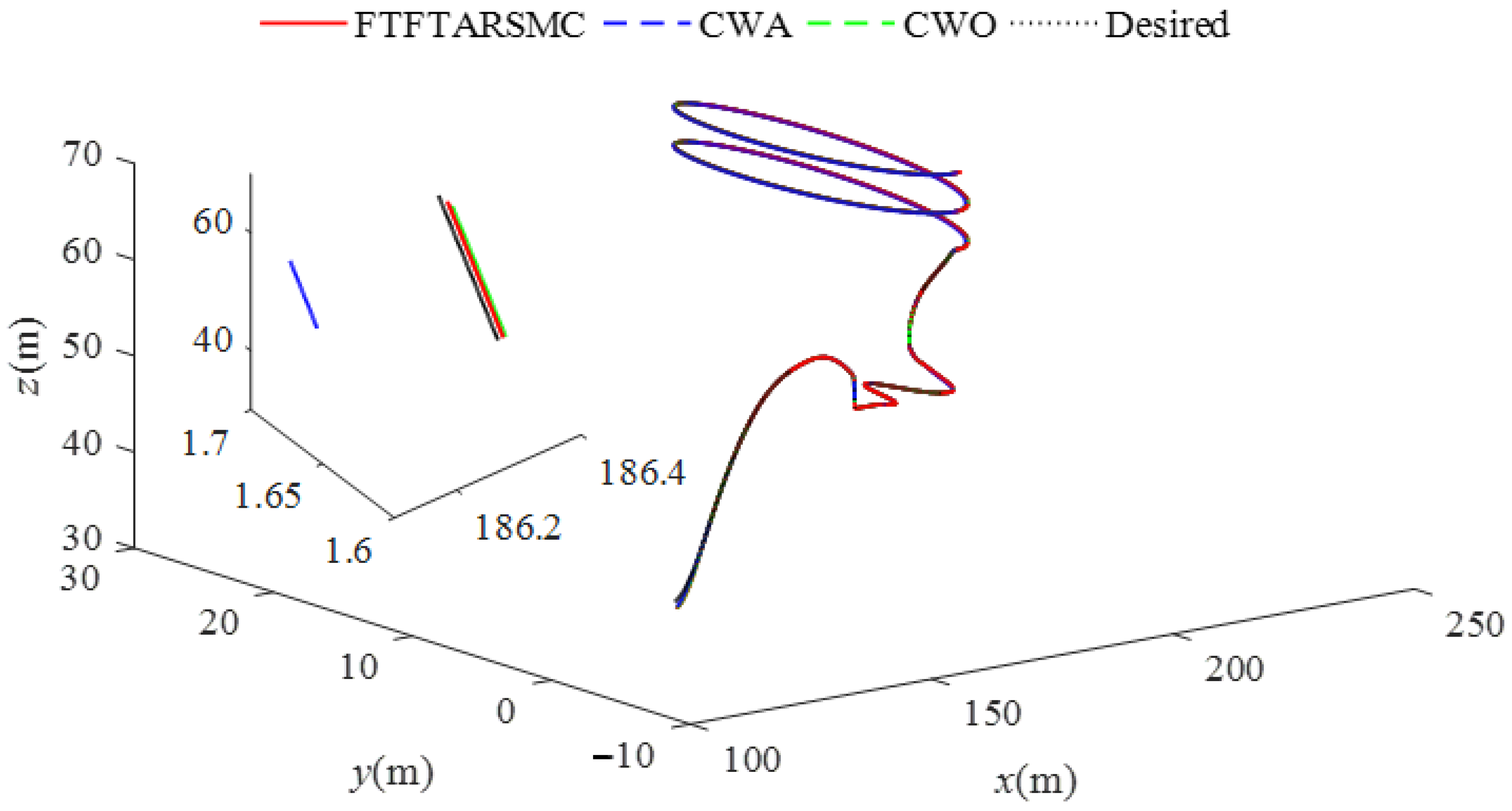
- Simulated topography is built according to topographic data of the TAG hydrothermal mound. Based on the obtained path, a trajectory model is constructed by cubic spline interpolation.
2. Nonlinear Model and Problem Formulation
2.1. Kinematics and Dynamics of the AUV
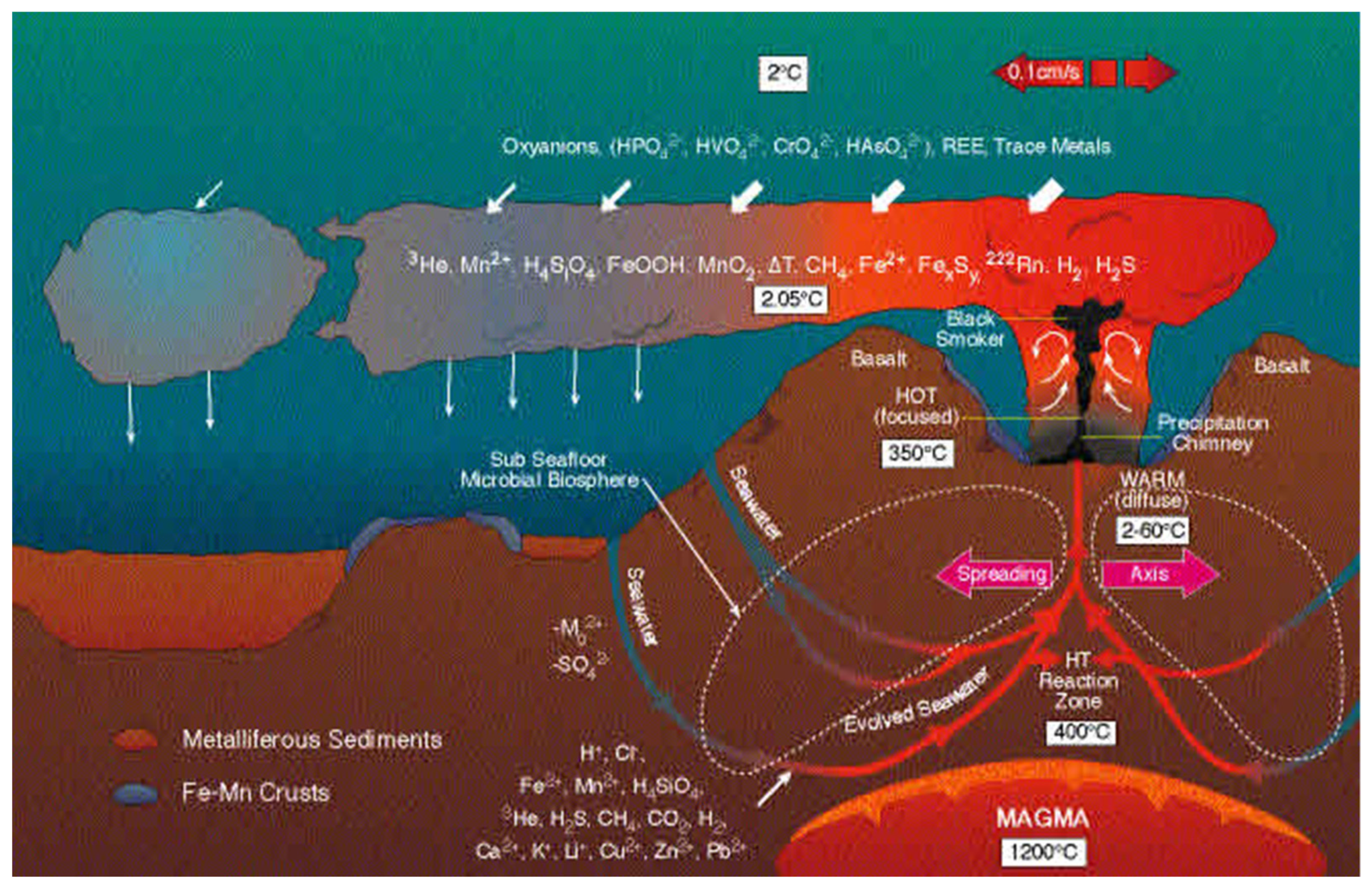
2.2. Effect of the Hydrothermal Field on AUVs
2.3. Problem Objective
3. Control Design and Stability Analysis
3.1. Definitions and Lemmas
3.2. Finite-Time Disturbance Observer Design
3.3. Fixed-Time Tracking Control Design
4. Topography Building and Trajectory Modeling
5. Numerical Simulations and Discussions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Grenne, T.; Slack, J.F. Mineralogy and geochemistry of silicate, sulfide, and oxide iron formations in Norway: Evidence for fluctuating redox states of early Paleozoic marine basins. Miner. Depos. 2019, 54, 829–848. [Google Scholar] [CrossRef]
- German, C.R.; Petersen, S.; Hannington, M.D. Hydrothermal exploration of mid-ocean ridges: Where might the largest sulfide deposits be forming? Chem. Geol. 2016, 420, 114–126. [Google Scholar] [CrossRef] [Green Version]
- Stobbs, I.J. Origins and Implications of Si-Fe Cap Rocks from Extinct Seafloor Massive Sulphide Deposits from the TAG Hydrothermal Field, 26° N, Mid-Atlantic Ridge; University of Southampton: Southampton, UK, 2020. [Google Scholar]
- Baker, E.T.; German, C.R.; Elderfield, H. Hydrothermal Plumes over Spreading-Center Axes: Global Distributions and Geological Inferences; American Geophysical Union: Malden, MA, USA, 1995; ISBN 978-11-1866-399-8. [Google Scholar]
- Coogan, L.A.; Seyfried, W.E.; Pester, N.J. Environmental controls on mid-ocean ridge hydrothermal fluxes. Chem. Geol. 2019, 528, 119285. [Google Scholar] [CrossRef]
- Maki, T.; Horimoto, H.; Ishihara, T.; Kofuji, K. Tracking a sea turtle by an AUV with a multibeam imaging sonar: Toward robotic observation of marine life. Int. J. Control Autom. Syst. 2020, 18, 597–604. [Google Scholar] [CrossRef]
- Heshmati-Alamdari, S.; Nikou, A.; Dimarogonas, D.V. Robust trajectory tracking control for underactuated autonomous underwater vehicles in uncertain environments. IEEE Trans. Autom. Sci. Eng. 2020, 18, 1288–1301. [Google Scholar] [CrossRef]
- Zhu, C.; Huang, B.; Zhou, B.; Su, Y.; Zhang, E. Adaptive model-parameter-free fault-tolerant trajectory tracking control for autonomous underwater vehicles. ISA Trans. 2021, 114, 57–71. [Google Scholar] [CrossRef] [PubMed]
- Zhu, C.; Huang, B.; Su, Y.; Zheng, Y.; Zheng, S. Finite-time rotation-matrix-based tracking control for autonomous underwater vehicle with input saturation and actuator faults. Int. J. Robust Nonlinear Control 2022, 32, 2925–2949. [Google Scholar] [CrossRef]
- He, S.; Kou, L.; Li, Y.; Xiang, J. Robust Orientation-Sensitive Trajectory Tracking of Underactuated Autonomous Underwater Vehicles. IEEE Trans. Ind. Electron. 2020, 68, 8464–8473. [Google Scholar] [CrossRef]
- Li, J.; Du, J.; Lewis, F.L. Distributed three-dimension time-varying formation control with prescribed performance for multiple underactuated autonomous underwater vehicles. Int. J. Robust Nonlinear Control 2021, 31, 6272–6287. [Google Scholar] [CrossRef]
- Wang, H.; Su, B.; Wang, Y.; Gao, J. Adaptive sliding mode fixed-time tracking control based on fixed-time sliding mode disturbance observer with dead-zone input. Complexity 2019, 2019, 8951382. [Google Scholar] [CrossRef] [Green Version]
- Qin, H.; Yang, H.; Sun, Y.; Zhang, Y. Adaptive Interval Type-2 Fuzzy Fixed-time Control for Underwater Walking Robot with Error Constraints and Actuator Faults Using Prescribed Performance Terminal Sliding-mode Surfaces. Int. J. Fuzzy Syst. 2020, 23, 1137–1149. [Google Scholar] [CrossRef]
- Chen, Z.; Yang, X.; Liu, X. RBFNN-based nonsingular fast terminal sliding mode control for robotic manipulators including actuator dynamics. Neurocomputing 2019, 362, 72–82. [Google Scholar] [CrossRef]
- Ning, W.; Meng, J.E. Direct Adaptive Fuzzy Tracking Control of Marine Vehicles With Fully Unknown Parametric Dynamics and Uncertainties. IEEE Trans. Control Syst. Technol. 2016, 24, 1845–1852. [Google Scholar] [CrossRef]
- Wang, N.; Karimi, H.R.; Li, H.; Su, S. Accurate Trajectory Tracking of Disturbed Surface Vehicles: A Finite-Time Control Approach. IEEE/ASME Trans. Mechatron. 2019, 24, 1064–1074. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, J. Output-Feedback Path-Following Control of Autonomous Underwater Vehicles Based on an Extended State Observer and Projection Neural Networks. IEEE Trans. Syst. Man Cybern. Syst. 2017, 48, 535–544. [Google Scholar] [CrossRef]
- Yang, X.; Yan, J.; Hua, C.; Guan, X. Trajectory Tracking Control of Autonomous Underwater Vehicle With Unknown Parameters and External Disturbances. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 1054–1063. [Google Scholar] [CrossRef]
- Huang, B.; Zhou, B.; Zhang, S.; Zhu, C. Adaptive prescribed performance tracking control for underactuated autonomous underwater vehicles with input quantization. Ocean Eng. 2021, 221, 108549. [Google Scholar] [CrossRef]
- Zhu, C.; Zeng, J.; Huang, B.; Su, Y.; Su, Z. Saturated approximation-free prescribed performance trajectory tracking control for autonomous marine surface vehicle. Ocean Eng. 2021, 237, 109602. [Google Scholar] [CrossRef]
- Yoerger, D.R.; Cooke, J.G.; Slotine, J.J. The influence of thruster dynamics on underwater vehicle behavior and their incorporation into control system design. IEEE J. Ocean. Eng. 1990, 15, 167–178. [Google Scholar] [CrossRef] [Green Version]
- Di Vito, D.; Cataldi, E.; Di Lillo, P.; Antonelli, G. Vehicle adaptive control for underwater intervention including thrusters dynamics. In Proceedings of the 2018 IEEE Conference on Control Technology and Applications (CCTA 2018), Copenhagen, Denmark, 21–24 August 2018; pp. 646–651. [Google Scholar]
- Bechlioulis, C.P.; Karras, G.C.; Heshmati-Alamdari, S.; Kyriakopoulos, K.J. Trajectory tracking with prescribed performance for underactuated underwater vehicles under model uncertainties and external disturbances. IEEE Trans. Control Syst. Technol. 2016, 25, 429–440. [Google Scholar] [CrossRef]
- Cui, R.; Zhang, X.; Cui, D. Adaptive sliding-mode attitude control for autonomous underwater vehicles with input nonlinearities. Ocean Eng. 2016, 123, 45–54. [Google Scholar] [CrossRef]
- Li, J.; Du, J.; Chang, W.J. Robust time-varying formation control for underactuated autonomous underwater vehicles with disturbances under input saturation. Ocean Eng. 2019, 179, 180–188. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, M.; Yao, F. Adaptive fault tolerant control and thruster fault reconstruction for autonomous underwater vehicle. Ocean Eng. 2018, 155, 10–23. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, M.; Wang, Y.; Rogers, E. Design and Experimental Validation of an Adaptive Sliding Mode Observer-Based Fault-Tolerant Control for Underwater Vehicles. IEEE Trans. Control. Syst. Technol. 2018, 27, 2655–2662. [Google Scholar] [CrossRef]
- Guerrero, J.A.; Torres, J.; Creuze, V.; Chemori, A. Adaptive disturbance observer for trajectory tracking control of underwater vehicles. Ocean Eng. 2020, 200, 107080. [Google Scholar] [CrossRef] [Green Version]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: New York, NY, USA, 2011; ISBN 978-11-1999-149-6. [Google Scholar]
- Ning, W.A.; Xp, B.; Sfs, C. Finite-time fault-tolerant trajectory tracking control of an autonomous surface vehicle. J. Frankl. Inst. 2020, 357, 11114–11135. [Google Scholar] [CrossRef]
- Galley, C.; Lelievre, P.; Haroon, A.; Graber, S.; Jamieson, J.; Szitkar, F.; Yeo, I.; Farquharson, C.; Petersen, S.; Evans, R. Magnetic and gravity surface geometry inverse modeling of the TAG active mound. J. Geophys. Res. Solid Earth 2021, 126, e2021JB022228. [Google Scholar] [CrossRef]
- Lupton, J.E. Hydrothermal plumes: Near and far field. Seafloor Hydrothermal Syst. Phys. Chem. Biol. Geol. Interact. 1995, 91, 317–346. [Google Scholar] [CrossRef]
- Zhiguo, H.E.; Han, X.Q.; Qiu, Z.Y.; WANG, Y.; QIU, Z. Numerical modeling of hydrodynamic processes of deep-sea hydrothermal plumes: A case study on Daxi hydrothermal field, Carlsberg Ridge. Sci. Sin. Technol. 2020, 50, 194–208. [Google Scholar] [CrossRef] [Green Version]
- PMEL Earth-Ocean Interactions Program, Axial Seamount. 2021. Available online: https://www.pmel.noaa.gov/eoi/chemistry/fluid.html (accessed on 5 March 2021).
- Zheng, Z.; Feroskhan, M.; Sun, L. Adaptive fixed-time trajectory tracking control of a stratospheric airship. ISA Trans. 2018, 76, 134–144. [Google Scholar] [CrossRef]
- Deng, H.; Krstić, M. Stochastic nonlinear stabilization—I: A backstepping design. Syst. Control Lett. 1997, 32, 143–150. [Google Scholar] [CrossRef]
- Huang, Y.; Jia, Y. Robust adaptive fixed-time tracking control of 6-DOF spacecraft fly-around mission for noncooperative target. Int. J. Robust Nonlinear Control 2018, 28, 2598–2618. [Google Scholar] [CrossRef]
- Liang, K.; Lin, X.; Chen, Y.; Li, J.; Ding, F. Adaptive sliding mode output feedback control for dynamic positioning ships with input saturation. Ocean Eng. 2020, 206, 107245. [Google Scholar] [CrossRef]
- Tang, P.; Lin, D.; Zheng, D.; Fan, S.; Ye, J. Observer based finite-time fault tolerant quadrotor attitude control with actuator faults. Aerosp. Sci. Technol. 2020, 104, 105968. [Google Scholar] [CrossRef]
- Zhu, G.; Du, J. Robust adaptive neural practical fixed-time tracking control for uncertain Euler-Lagrange systems under input saturations. Neurocomputing 2020, 412, 502–513. [Google Scholar] [CrossRef]
- Plestan, F.; Shtessel, Y.; Bregeault, V.; Poznyak, A. New methodologies for adaptive sliding mode control. Int. J. Control 2010, 83, 1907–1919. [Google Scholar] [CrossRef] [Green Version]
- Ullah, S.; Khan, Q.; Mehmood, A.; Kirmani, S.A.M.; Mechali, O. Neuro-adaptive fast integral terminal sliding mode control design with variable gain robust exact differentiator for under-actuated quadcopter UAV. ISA Trans. 2021, 120, 293–304. [Google Scholar] [CrossRef]
- Cruz-Ortiz, D.; Chairez, I.; Poznyak, A. Non-singular terminal sliding-mode control for a manipulator robot using a barrier Lyapunov function. ISA Trans. 2021, 121, 268–283. [Google Scholar] [CrossRef]
- Humphris, S.E.; Tivey, M.K.; Tivey, M.A. The Trans-Atlantic Geotraverse hydrothermal field: A hydrothermal system on an active detachment fault. Deep. Sea Res. Part II Top. Stud. Oceanogr. 2015, 121, 8–16. [Google Scholar] [CrossRef] [Green Version]
- Graber, S.; Petersen, S.; Yeo, I.; Szitkar, F.; Klischies, M.; Jamieson, J.; Stobbs, I. Structural control, evolution, and accumulation rates of massive sulfides in the TAG hydrothermal field. Geochem. Geophys. Geosystems 2020, 21, e2020GC009185. [Google Scholar] [CrossRef]
- Jiang, H.; Breier, J.A. Physical controls on mixing and transport within rising submarine hydrothermal plumes: A numerical simulation study. Deep. Sea Res. Part I Oceanogr. Res. Pap. 2014, 92, 41–55. [Google Scholar] [CrossRef]
- Matulka, A.; López, P.; Redondo, J.M.; Tarquis, A. On the entrainment coefficient in a forced plume: Quantitative effects of source parameters. Nonlinear Processes Geophys. 2014, 21, 269–278. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| , , |
| , |
| , |
| , |
| , , |
| . |
| eii | 0.1 [5;7;7;5;6;7] | t0i | 15 [1;1;1;1;1;1] |
| ai | 5 [4;2;1;1;1;3] | 10 [3;3;3;3;3;3] |
| ITAE | ITASE | IASE | ||
|---|---|---|---|---|
| FTFTARSMCer | e31 | 206.7718 | 2.1955 | 0.0997 |
| e32 | 45.3205 | 0.1031 | 0.0011 | |
| e33 | 33.4241 | 1.9037 | 1.3802 | |
| e34 | 14.3956 | 0.0104 | 0.0001 | |
| e35 | 24.8612 | 0.0309 | 0.0004 | |
| e36 | 180.7496 | 1.6545 | 0.0243 | |
| CWA | e31 | 325.5508 | 2.6156 | 0.1369 |
| e32 | 26.7925 | 0.0471 | 0.0006 | |
| e33 | 34.2774 | 1.9877 | 1.4256 | |
| e34 | 14.1360 | 0.0111 | 0.0001 | |
| e35 | 18.7225 | 0.0196 | 0.0002 | |
| e36 | 279.7739 | 2.6131 | 0.0644 | |
| CWO | e31 | 193.1567 | 1.9803 | 0.0984 |
| e32 | 41.1993 | 0.0862 | 0.0010 | |
| e33 | 33.3455 | 1.8076 | 1.3446 | |
| e34 | 20.0825 | 0.0203 | 0.0002 | |
| e35 | 28.9049 | 0.0421 | 0.0005 | |
| e36 | 207.3014 | 2.1813 | 0.0379 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, G.; Liu, Y.; Zhang, Z.; Xu, Y. Adaptive Disturbance-Observer-Based Continuous Sliding Mode Control for Small Autonomous Underwater Vehicles in the Trans-Atlantic Geotraverse Hydrothermal Field with Trajectory Modeling Based on the Path. J. Mar. Sci. Eng. 2022, 10, 721. https://doi.org/10.3390/jmse10060721
Chen G, Liu Y, Zhang Z, Xu Y. Adaptive Disturbance-Observer-Based Continuous Sliding Mode Control for Small Autonomous Underwater Vehicles in the Trans-Atlantic Geotraverse Hydrothermal Field with Trajectory Modeling Based on the Path. Journal of Marine Science and Engineering. 2022; 10(6):721. https://doi.org/10.3390/jmse10060721
Chicago/Turabian StyleChen, Guofang, Yihui Liu, Ziyang Zhang, and Yufei Xu. 2022. "Adaptive Disturbance-Observer-Based Continuous Sliding Mode Control for Small Autonomous Underwater Vehicles in the Trans-Atlantic Geotraverse Hydrothermal Field with Trajectory Modeling Based on the Path" Journal of Marine Science and Engineering 10, no. 6: 721. https://doi.org/10.3390/jmse10060721
APA StyleChen, G., Liu, Y., Zhang, Z., & Xu, Y. (2022). Adaptive Disturbance-Observer-Based Continuous Sliding Mode Control for Small Autonomous Underwater Vehicles in the Trans-Atlantic Geotraverse Hydrothermal Field with Trajectory Modeling Based on the Path. Journal of Marine Science and Engineering, 10(6), 721. https://doi.org/10.3390/jmse10060721