
Fast Finite-Time Path-Following Control of Unmanned Surface Vehicles with Sideslip Compensation and Time-Varying Disturbances



Abstract
:1. Introduction
- (1)
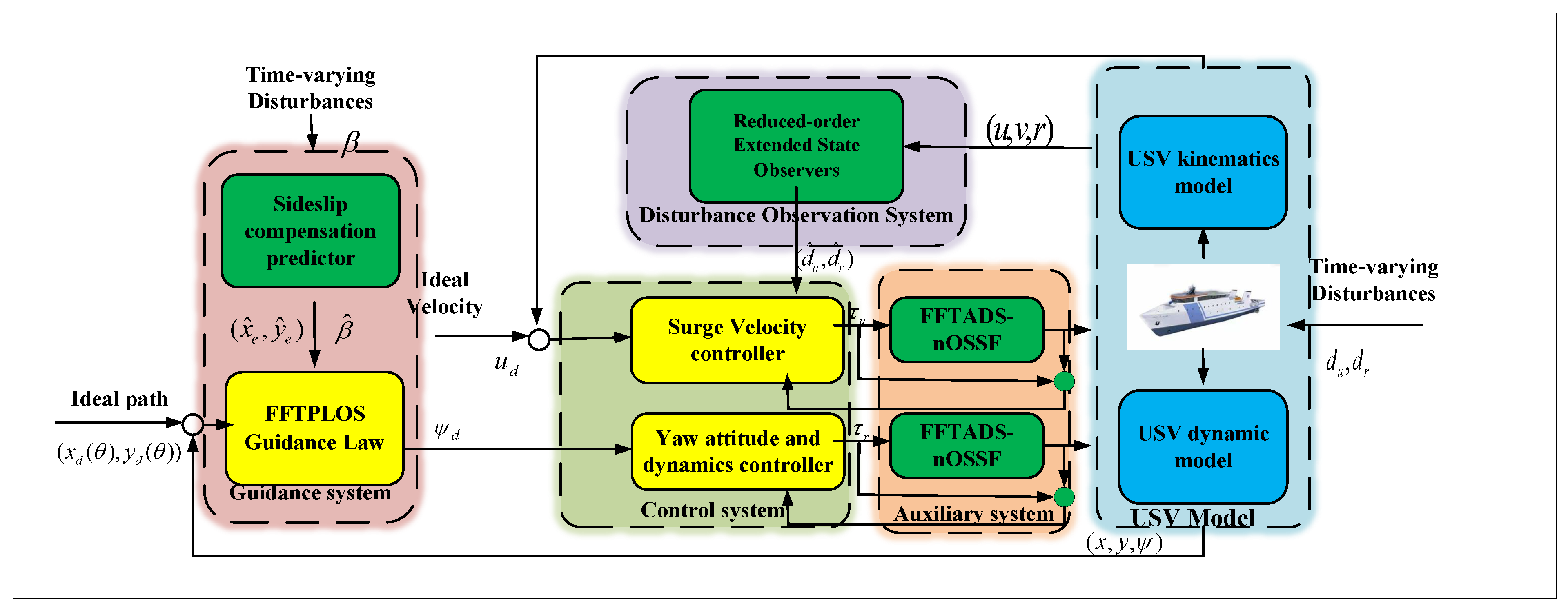
- In the guidance module, compared with the PLOS [12,13] that prediction errors are applied to in order to identify the sideslip angle, the FFTPLOS is employed instead of the PLOS such that this angle is compensated within a finite time. The better estimated performances, not only in steady state but also in transient state, are reached rapidly without causing high-frequency oscillation.
- (2)
- In the control module, a robust finite-time feedback control law is applied to keep vehicles following the desired path. Moreover, the ROESO provide accuracy for the time-varying disturbances on the along velocity and cross velocity, achieving a prominent control effect at the USV’s kinetic level under complex ocean conditions. More importantly, the system exhibits better disturbance estimation performance than [22].
- (3)
- Compared with the ADS in [28] that alleviates input saturation of the propulsion systems, the novel FFTADS-SSF is introduced to replace the ADS such that actuator input is limited within a finite settling time, which produces lower consumption. The better physical constraints are superior to the ADS scheme in tracking performance and control accuracy.
2. Problem Formulation and Preliminaries
2.1. USV Model
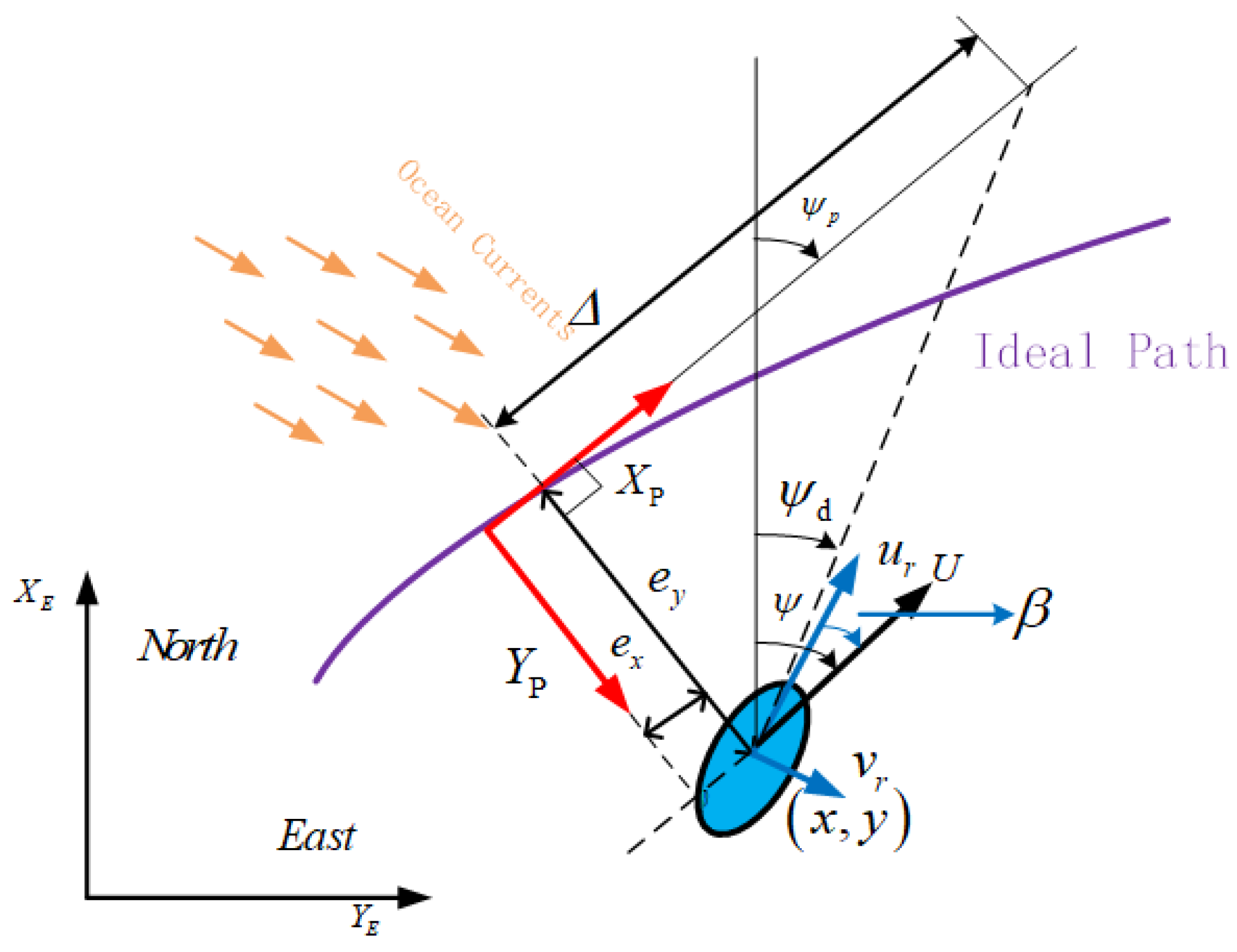
2.2. Position Error Dynamic Equation
2.3. Lemma and Assumption
2.4. Control Objectives
3. Guidance Law Design
3.1. Fast Finite-Time Sideslip Angle Estimation
3.2. Guidance Law Design
4. Path-Following Control Design
4.1. Yaw Attitude and Dynamics Controller Design
4.2. Surge Velocity Controller Design
5. Stability Analysis
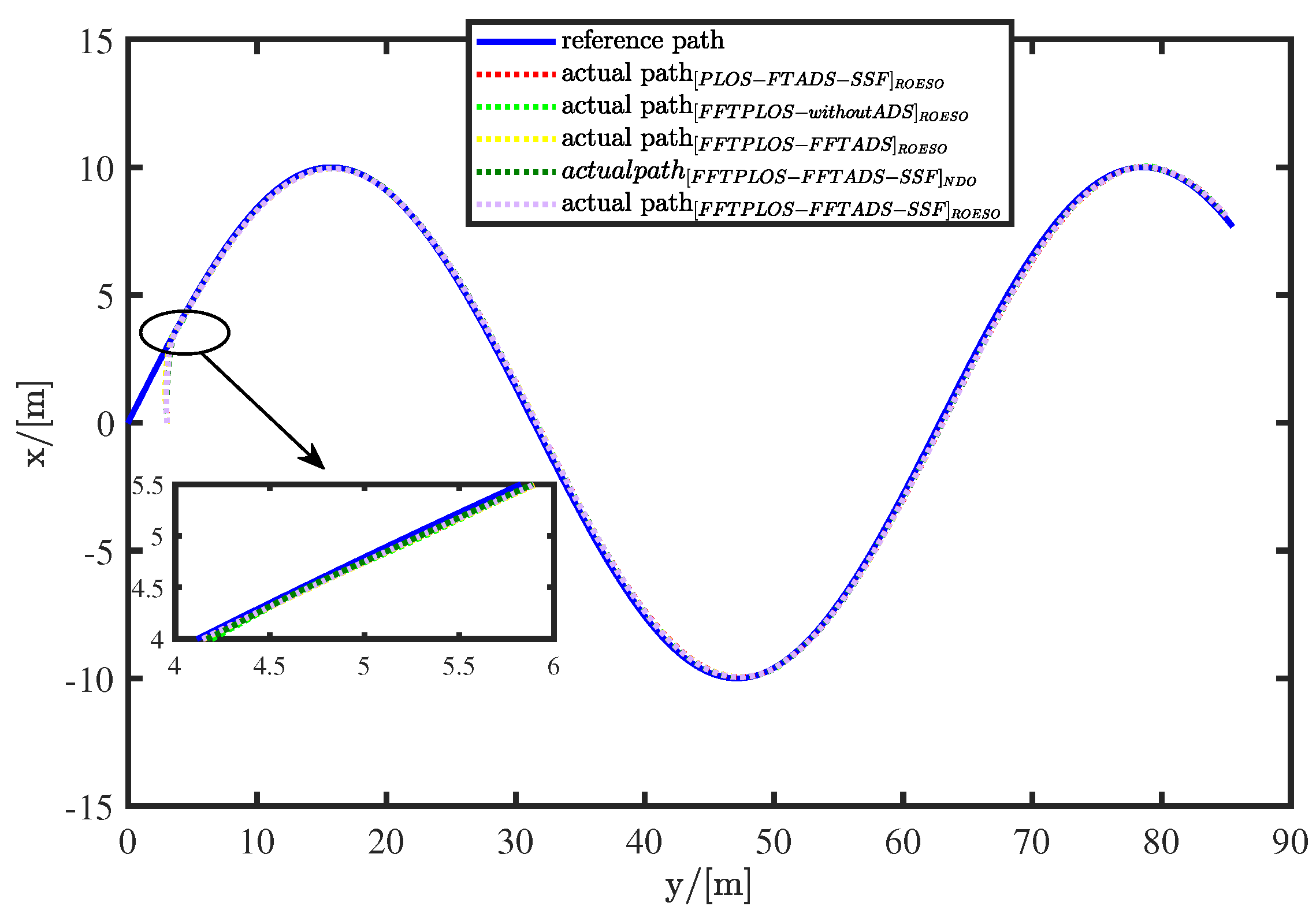
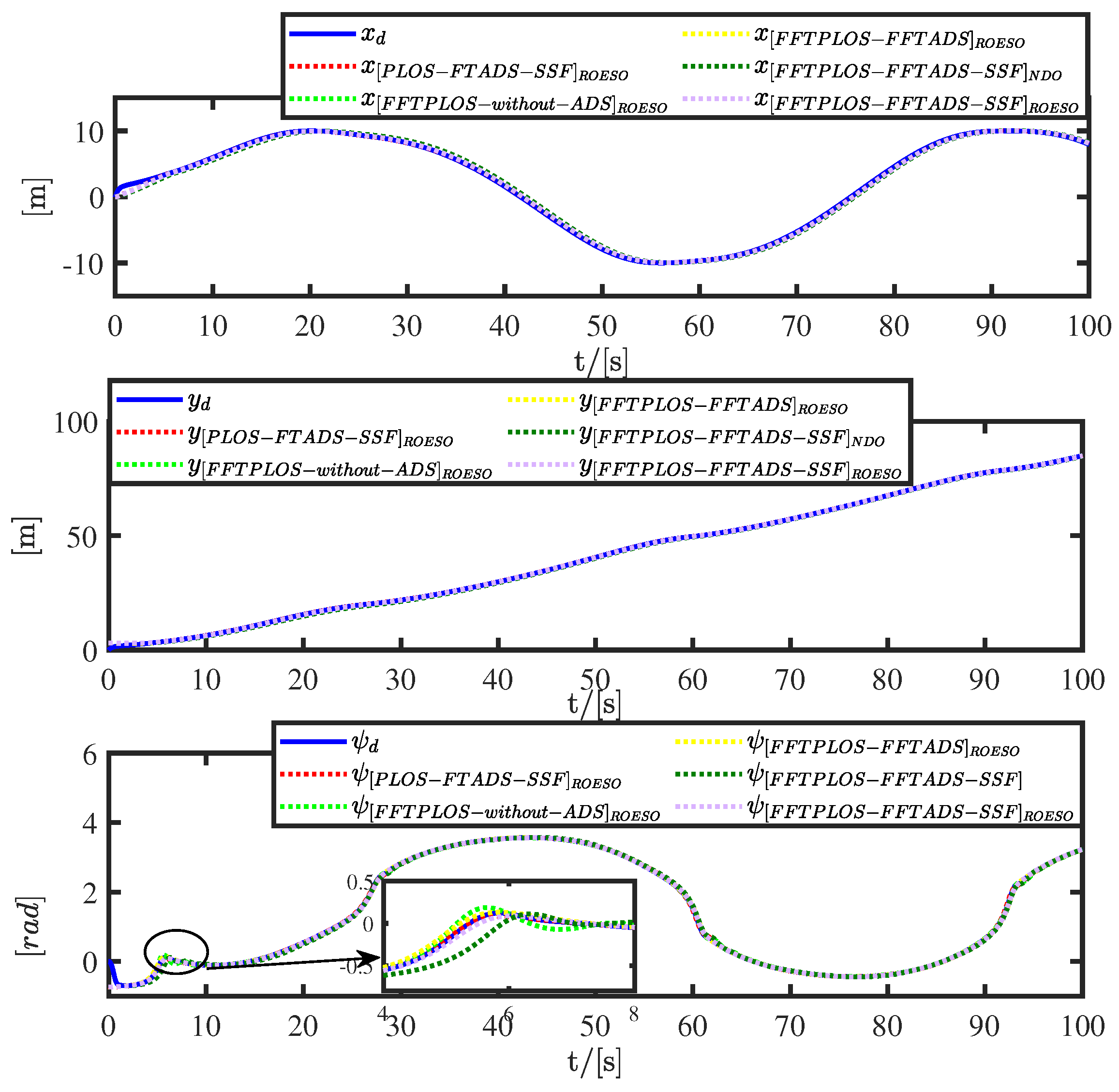
6. Simulations
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| USV | unmanned surface vehicle |
| LOS | line-of-sight |
| DOF | degree of freedom |
| FFTPLOS | fast finite-time predictor-based line-of-sight |
| ROESO | reduced-order extended state observers |
| IS | input saturation |
| ADS | auxiliary dynamic system |
| FFTADS | fast finite-time auxiliary dynamic system |
| FFTADS-SFF | fast finite-time auxiliary dynamic system with smoothly switching function |
References
- Sinisterra, A.J.; Dhanak, M.R.; Ellenrieder, K.V. Stereovision-based target tracking system for USV operations. Ocean. Eng. 2017, 133, 197–214. [Google Scholar] [CrossRef]
- Fan, Y.; Mu, D.; Zhang, X.; Wang, G.; Guo, C. Course keeping Control Based on Integrated Nonlinear Feedback for a USV with Pod-like Propulsion. J. Navig. 2018, 74, 878–898. [Google Scholar] [CrossRef]
- Wang, N.; Sun, Z.; Zhang, Z.J. Finite-Time Sideslip Observer-Based Adaptive Fuzzy Path-Following Control of Underactuated Marine Vehicles with Time-Varying Large Sideslip. Int. J. Fuzzy Syst. 2018, 20, 1767–1778. [Google Scholar] [CrossRef]
- Flores, G.; Lugo-Cardenas, I.; Lozano, R. A nonlinear path-following strategy for a fixed-wing MAV. In Proceedings of the 2013 International Conference on Unmanned Aircraft Systems, Atlanta, GA, USA, 28–31 May 2013; pp. 1014–1021. [Google Scholar]
- Wang, H.; Zuo, Z.; Wang, Y.; Yang, H. Composite Nonlinear Path-Following Control for Unmanned Ground Vehicles with Anti-Windup ESO. IEEE Trans. Syst. Man, Cybern. Syst. 2021, 1–12. [Google Scholar] [CrossRef]
- Lekkas, A.M.; Fossen, T.I. Integral LOS Path Following for Curved Paths Based on a Monotone Cubic Hermite Spline Parametrization. IEEE Trans. Control. Syst. Technol. 2014, 22, 2287–2301. [Google Scholar] [CrossRef]
- Fossen, T.T.; Pettersen, K.Y.; Galeazzi, R. Line-of-Sight Path Following for Dubins Paths With Adaptive Sideslip Compensation of Drift Forces. IEEE Trans. Control. Syst. Technol. 2015, 23, 820–827. [Google Scholar] [CrossRef] [Green Version]
- Liu, T.; Dong, Z.P.; Du, H.W.; Song, L.F.; Mao, Y.S. Path Following Control of the Underactuated USV Based on the Improved Line-of-Sight Guidance Algorithm. Pol. Marit. Res. 2017, 24, 3–11. [Google Scholar] [CrossRef] [Green Version]
- Fossen, T.I.; Lekkas, A.M. Direct and indirect adaptive integral line-of-sight path-following controllers for marine craft exposed to ocean currents. Adapt. Control. Signal Process. Mar. Syst. 2017, 31, 445–463. [Google Scholar] [CrossRef]
- Mu, D.D.; Wang, G.F.; Fan, Y.S.H. Adaptive LOS Path Following for a Podded Propulsion Unmanned Surface Vehicle with Uncertainty of Model and Actuator Saturation. Appl. Sci. 2017, 7, 1232. [Google Scholar] [CrossRef] [Green Version]
- Lu, L.; Wang, D.; Peng, Z. ESO-Based Line-of-Sight Guidance Law for Path Following of Underactuated Marine Surface Vehicles With Exact Sideslip Compensation. IEEE J. Ocean. Eng. 2017, 42, 477–487. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Peng, Z. Predictor-based LOS guidance law for path following of underactuated marine surface vehicles with sideslip compensation. Ocean. Eng. 2016, 124, 340–348. [Google Scholar] [CrossRef]
- Fan, Y.; Zou, X.; Wang, G.; Mu, D. Robust Adaptive Path Following Control Strategy for Underactuated Unmanned Surface Vehicles with Model Deviation and Actuator Saturation. Appl. Sci. 2022, 12, 2696. [Google Scholar] [CrossRef]
- Mu, D.D.; Zhao, Y.S.H.; Wang, G.F. Course control of USV based on fuzzy adaptive guide control. In Proceedings of the 2016 Chinese Control and Decision Conference (CCDC), Yinchuan, China, 28–30 May 2016; pp. 6433–6437. [Google Scholar]
- Lapierre, L.; Jouvencel, B. Nonlinear Path Following Control of an AUV. Ocean. Eng. 2007, 34, 1734–1744. [Google Scholar] [CrossRef]
- Rui, W.; Wang, S.; Yu, W. Path following for a biomimetic underwater vehicle based on ADRC. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation, Singapore, 29 May–3 June 2017; pp. 3519–3524. [Google Scholar]
- Qiu, B.B.; Wang, G.F.; Fan, Y.S.H. Robust Adaptive Trajectory Linearization Control for Tracking Control of Surface Vessels with Modeling Uncertainties under Input Saturation. IEEE Access 2019, 7, 5057–5070. [Google Scholar] [CrossRef]
- Gonzalez-Garcia, H.; Castañeda, H. Guidance and Control Based on Adaptive Sliding Mode Strategy for a USV Subject to Uncertainties. IEEE J. Ocean. Eng. 2021, 46, 1144–1154. [Google Scholar] [CrossRef]
- Fossen, T.I.; Berge, S.P. Nonlinear vectorial backstepping design for global exponential tracking of marine vessels in the presence of actuator dynamics. In Proceedings of the 36th IEEE Conference on Decision and Control, San Diego, CA, USA, 12 December 1997; pp. 4237–4242. [Google Scholar]
- Sun, Z.; Zhang, G.; Yi, B. Practical proportional integral sliding mode control for underactuated surface ships in the fields of marine practice. Ocean. Eng. 2017, 142, 217–223. [Google Scholar] [CrossRef]
- Yu, Y.L.; Guo, C.H.; Yu, H.M. Finite-Time PLOS-Based Integral Sliding-Mode Adaptive Neural Path Following for Unmanned Surface Vessels with Unknown Dynamics and Disturbances. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1500–1511. [Google Scholar] [CrossRef]
- Liu, C.; Mcaree, O.; Chen, W.H. Path following control for small fixed-wing unmanned aerial vehicles under wind disturbances. Int. J. Robust Nonlinear Control 2012, 23, 1682–1698. [Google Scholar] [CrossRef]
- Chen, W.H.; Yang, J.; Guo, L. Disturbance-Observer-Based Control and Related Methods—An Overview. IEEE Trans. Ind. Electron. 2016, 63, 1083–1095. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.S.H.; Qiu, B.B.; Wang, G.F.; Fan, Y.S.H. Robust Path Following Control of Underactuated Unmanned Surface Vehicle with Disturbances and Input Saturation. IEEE Access 2021, 9, 46106–46116. [Google Scholar] [CrossRef]
- Wu, G.Q.; Song, S.M.; Sun, J.G. Finite-Time Dynamic Surface Antisaturation Control for Spacecraft Terminal Approach Considering Safety. J. Spacecr. Rocket. 2018, 55, 6. [Google Scholar] [CrossRef]
- Deng, Y.; Zhang, X.; Im, N. Adaptive fuzzy tracking control for underactuated surface vessels with unmodeled dynamics and input saturation. ISA Trans. 2020, 103, 52–62. [Google Scholar] [CrossRef] [PubMed]
- Baca, T.; Loianno, G.; Saska, M. Embedded model predictive control of unmanned micro aerial vehicles. In Proceedings of the 2016 21st International Conference on Methods and Models in Automation and Robotics (MMAR), Międzyzdroje, Poland, 29 August–1 September 2016; pp. 992–997. [Google Scholar]
- Zheng, Z.W.; Sun, L. Path following control for marine surface vessel with uncertainties and input saturation. Neurocomputing 2016, 177, 158–167. [Google Scholar] [CrossRef]
- Du, J.; Hu, X.; Krsti, M. Robust dynamic positioning of ships with disturbances under input saturation. Automatica 2016, 73, 207–214. [Google Scholar] [CrossRef]
- Li, M.C.H.; Guo, C.H.; Yu, H.M. Line-of-sight-based global finite-time stable path following control of unmanned surface vehicles with actuator saturation. ISA Trans. 2021, 125, 306–317. [Google Scholar] [CrossRef] [PubMed]
- Li, M.C.H.; Guo, C.H.; Yu, H.M. Global finite-time control for coordinated path following of multiple underactuated unmanned surface vehicles along one curve under directed topologies. Ocean. Eng. 2021, 237, 109608. [Google Scholar] [CrossRef]
- Skjetne, R.; Fossen, T.I.; Kokotovic, P.V. Adaptive maneuvering, with experiments, for a model ship in a marine control laboratory. Automatica 2005, 41, 289–298. [Google Scholar] [CrossRef]
- Chen, X.; Liu, Z.H.; Zhang, J.Q. Adaptive sliding-mode path following control system of the underactuated USV under the influence of ocean currents. J. Syst. Eng. Electron. 2018, 29, 1271–1283. [Google Scholar]
- Do, K.D.; Pan, J. Global tracking control of underactuated ships with nonzero off-diagonal terms in their system matrices. Automatica 2005, 41, 87–95. [Google Scholar]
- Fortuna, J.; Fossen, T.I. Cascaded line-of-sight path-following and sliding mode controllers for fixed-wing UAVs. In Proceedings of the 2015 IEEE Conference on Control and Applications (CCA 2015), Sydney, Australia, 21–23 September 2015; pp. 798–803. [Google Scholar]
- Wu, J.; Chen, W.; Zhao, D. Globally stable direct adaptive backstepping NN control for uncertain nonlinear strict-feedback systems. Neurocomputing 2013, 122, 134–147. [Google Scholar] [CrossRef]
- Zou, Y.; Zheng, Z. A Robust Adaptive RBFNN Augmenting Backstepping Control Approach for a Model-Scaled Helicopter. IEEE Trans. Control Syst. Technol. 2015, 23, 2344–2352. [Google Scholar] [CrossRef]
- Zheng, Z.; Feroskhan, M. Path Following of a Surface Vessel with Prescribed Performance in the Presence of Input Saturation and External Disturbances. IEEE/ASME Trans. Mechatron. 2017, 22, 2564–2575. [Google Scholar] [CrossRef]
- Yu, S.H.; Yu, X.H.; Shirinzadeh, B. Continuous finite-time control for robotic manipulators with terminal sliding mode. Automatica 2005, 41, 1957–1964. [Google Scholar] [CrossRef]
- Hong, Y.G.; Huang, J.; Xu, Y.S.H. On an output feedback finite-time stabilization problem. IEEE Trans. Autom. Control 2001, 46, 305–309. [Google Scholar] [CrossRef] [Green Version]
- Roy, S.; Roy, S.B.; Kar, I.N. Adaptive-Robust Control of Euler-Lagrange Systems with Linearly Parametrizable Uncertainty Bound. IEEE Trans. Control Syst. Technol. 2018, 26, 1842–1850. [Google Scholar] [CrossRef] [Green Version]
- Fredriksen, E.; Pettersen, K.Y. Global κ-exponential way-point maneuvering of ships: Theory and experimentsy. Automatica 2006, 42, 677–687. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mark | Value | Mark | Value | Mark | Value |
|---|---|---|---|---|---|
| 25.8 | 33.8 | 1.0115 | |||
| 2.76 | −0.2601 | 0.9257 | |||
| 2.8909 | −0.2601 | 0.5 |
| Metrics | Input Type | PLOS-FFTADS -SFF | FFTPLOS- without -ADS | FFTPLOS- FTADS | FFTPLOS- FFTADS -SFF | FFTPLOS- FFTADS -SFF |
|---|---|---|---|---|---|---|
| IAE | , | = 22.1603 = 0.3775 | = 7.0718 = 0.3544 | = 5.0944 = 0.3427 | = 4.1965 = 0.4006 | = 4.0043 = 0.3879 |
| , | = 13.5847 = 0.7936 | = 13.0046 = 0.7438 | = 13.0732 = 0.7319 | = 13.4949 = 0.8421 | = 12.7466 = 0.8417 | |
| = 8.3814 | = 9.3749 | = 8.0252 | = 4.9489 | = 4.7871 | ||
| ITAE | , | = 1129.8 = 18.9755 | = 361.1162 = 17.3685 | = 258.7596 = 17.4393 | = 205.7960 = 20.4001 | = 205.1941 = 19.8820 |
| , | = 465.4997 = 41.5967 | = 456.9519 = 38.9382 | = 453.6706 = 38.3516 | = 430.9628 = 44.1912 | = 428.1403 = 43.8426 | |
| = 453.3129 | = 511.2425 | = 434.7642 | = 244.2495 | = 240.2223 |
| Metrics | Input Type | PLOS-FFTADS -SFF | FFTPLOS- without -ADS | FFTPLOS- FTADS | FFTPLOS- FFTADS -SFF | FFTPLOS- FFTADS -SFF |
|---|---|---|---|---|---|---|
| IAE | = 0.3262 | = 0.2966 | = 0.2718 | = 1.5889 | = 0.2330 | |
| = 0.3263 | = 0.2967 | = 0.2719 | = 11.5031 | = 0.2332 | ||
| ITAE | = 16.1098 | = 14.6454 | = 13.4254 | = 53.6952 | = 11.5038 | |
| = 15.7509 | = 14.3186 | = 13.1250 | = 492.7868 | = 11.2516 |
| Metrics | Input Type | PLOS- FFTADS -SFF | FFTPLOS- without -ADS | FFTPLOS- FTADS | FFTPLOS- FFTADS -SFF | FFTPLOS- FFTADS -SFF |
|---|---|---|---|---|---|---|
| ISA | 15.3232 | 15.7294 | 14.7035 | 14.5371 | 14.4594 | |
| 183.1642 | 197.2831 | 187.2748 | 185.1934 | 180.8806 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Z.; Wang, G.; Fan, Y.; Qiao, S. Fast Finite-Time Path-Following Control of Unmanned Surface Vehicles with Sideslip Compensation and Time-Varying Disturbances. J. Mar. Sci. Eng. 2022, 10, 960. https://doi.org/10.3390/jmse10070960
He Z, Wang G, Fan Y, Qiao S. Fast Finite-Time Path-Following Control of Unmanned Surface Vehicles with Sideslip Compensation and Time-Varying Disturbances. Journal of Marine Science and Engineering. 2022; 10(7):960. https://doi.org/10.3390/jmse10070960
Chicago/Turabian StyleHe, Zhiping, Guofeng Wang, Yunsheng Fan, and Shuanghu Qiao. 2022. "Fast Finite-Time Path-Following Control of Unmanned Surface Vehicles with Sideslip Compensation and Time-Varying Disturbances" Journal of Marine Science and Engineering 10, no. 7: 960. https://doi.org/10.3390/jmse10070960
APA StyleHe, Z., Wang, G., Fan, Y., & Qiao, S. (2022). Fast Finite-Time Path-Following Control of Unmanned Surface Vehicles with Sideslip Compensation and Time-Varying Disturbances. Journal of Marine Science and Engineering, 10(7), 960. https://doi.org/10.3390/jmse10070960