
Nonlinear Innovation-Based Maneuverability Prediction for Marine Vehicles Using an Improved Forgetting Mechanism


Abstract
:1. Introduction
- (1)
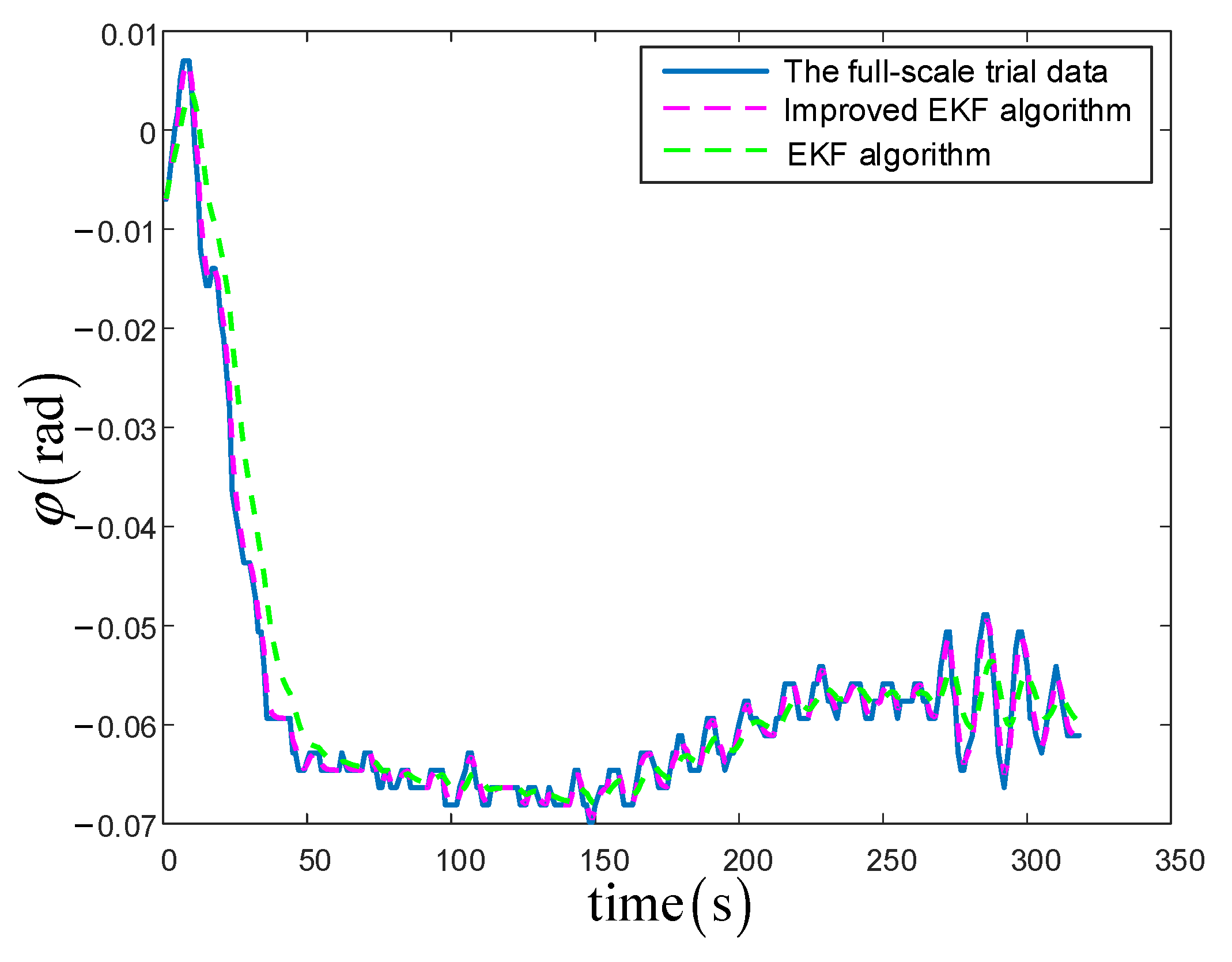
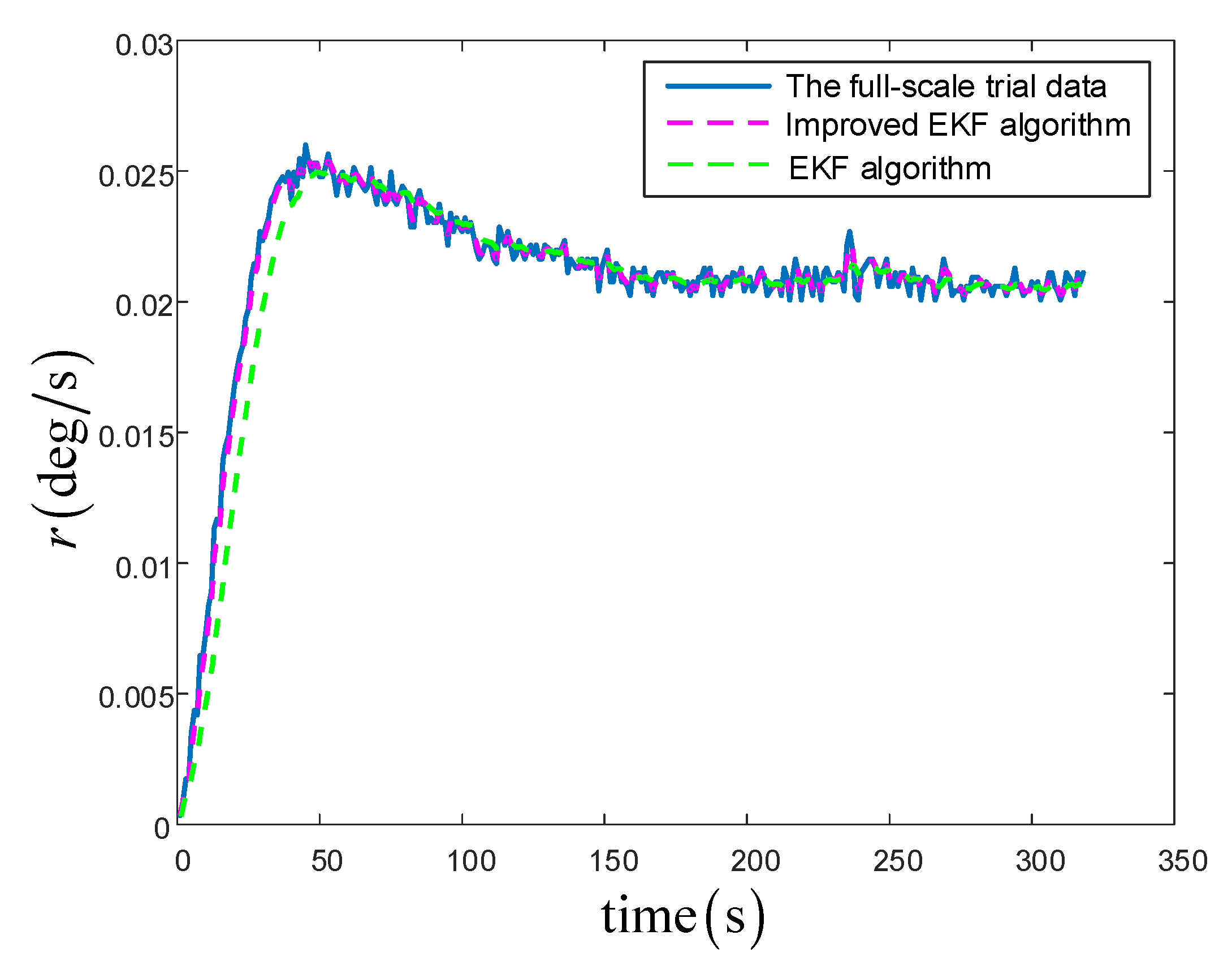
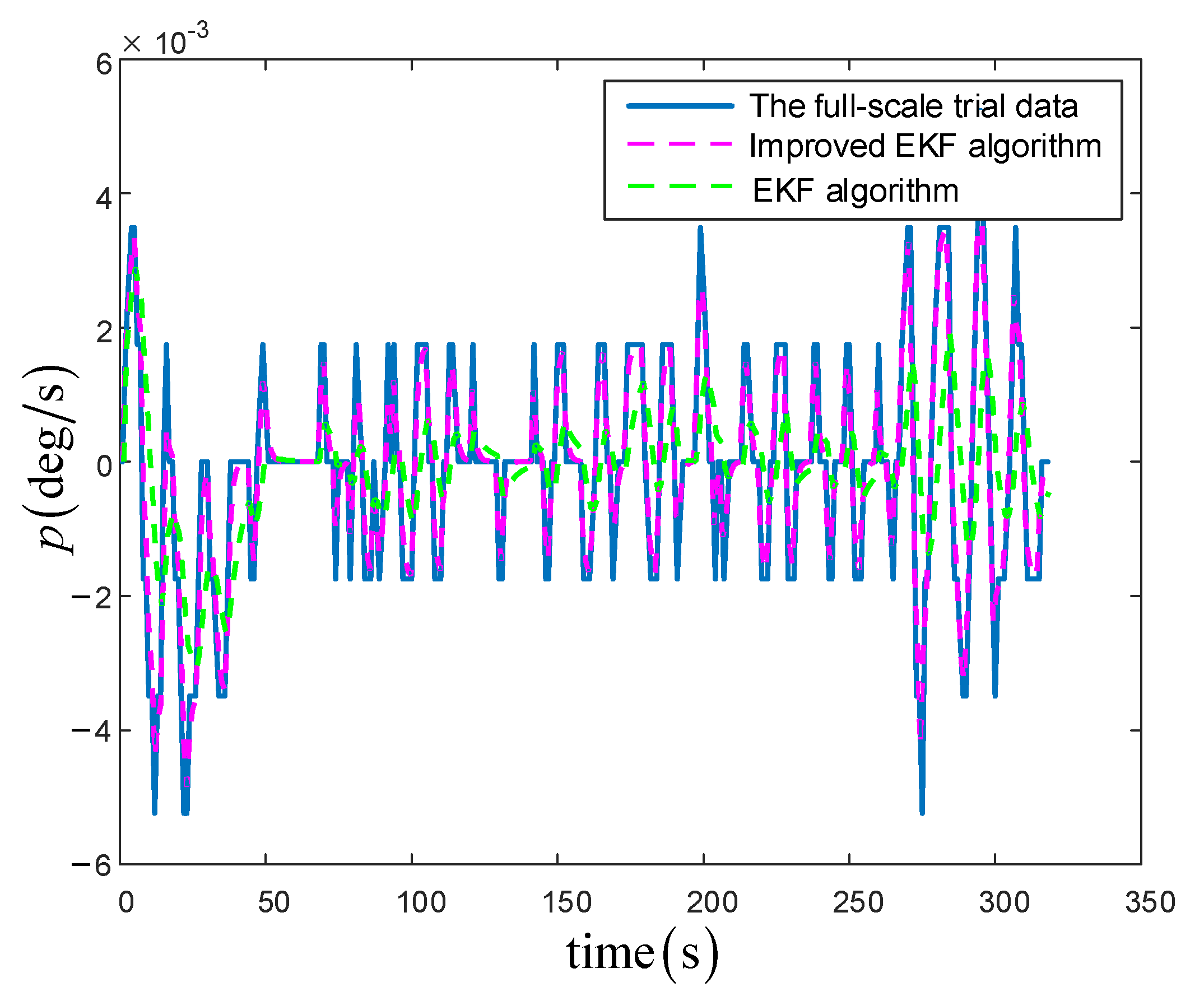
- In this paper, an improved EFK algorithm was developed by virtue of nonlinear innovation. This solved the problem of limited innovation length for full-scale trail data and improved the online prediction convergence speed in engineering practice. Then, the tangent function was used to process errors. The forgetting factor was introduced to reduce the cumulative impact of historical interference data. The convergence of the improved algorithm identification and the consistency between the real-time prediction of ship maneuvering and the actual navigation were analyzed theoretically. In order to verify the effectiveness of the proposed method, this paper used real ship experimental data for turning tests. On this basis, the improved algorithm was compared with full-scale test data. The results showed that the proposed algorithm is effective, and that the real-time prediction data were more than 95% consistent with the ship’s actual navigation. This is more suitable for ship model parameter identification and maneuverability prediction. This has leading significance for practical engineering applications.
- (2)
- In this paper, a maneuvering prediction method was proposed for 4-DOF attitude prediction, using the corresponding nonlinear innovation algorithm. The parameters in the motion model were optimized to reduce the estimation error of the minimum variance, greatly improving the identification accuracy and efficiency. The most important purpose of this was to reduce the fitting time and improve the fitting degree. The effectiveness of this method for the real-time identification of ship motion mathematical model parameters was proven, and the feasibility of the ship motion prediction was verified. This method provides a theoretical reference for the real-time identification of actual ship motion.
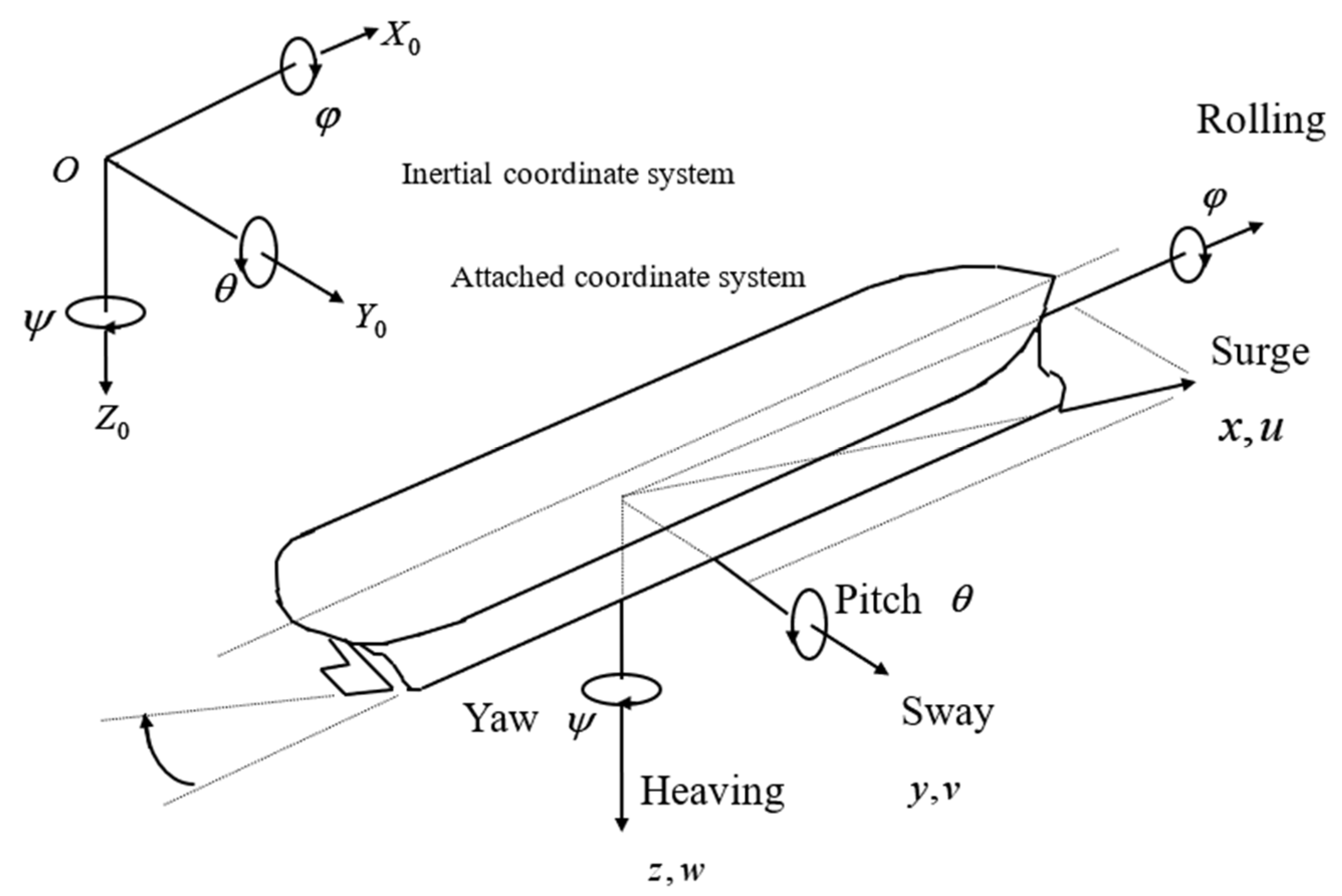
2. Description of the Mathematical Model
3. Design of the Nonlinear Innovation Based on the Identification Algorithm
4. Experiment for the Maneuvering Prediction and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Duncombe, J.U. Infrared navigation—Part I: An assessment of feasibility. IEEE Trans. Electron Devices 1959, ED-11, 34–39. [Google Scholar] [CrossRef]
- Guo, J.; Chiu, F.C.; Cheng, S.W.; Chen, H.W. Docking control for a biomimetic autonomous underwater vehicle using active vision. IFAC Proc. Vol. 2006, 3916, 335–347. [Google Scholar] [CrossRef]
- Song, C.; Zhang, X.; Zhang, G. Nonlinear innovation identification of ship response model via the hyperbolic tangent function. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2021, 235, 977–983. [Google Scholar] [CrossRef]
- Parczewski, K.; Wnk, H. The influence of vehicle body roll angle on the motion stability and maneuverability of the vehicle. Combust. Engines 2017, 56, 133–139. [Google Scholar] [CrossRef]
- Hu, J.; Bu, R.; Yin, J.; Wang, Y. Adaptive control for ship steering based on clonal selection model identification. In Proceedings of the 2009 Chinese Control and Decision Conference, Guilin, China, 17–19 June 2009; pp. 2863–2868. [Google Scholar]
- Sonnenburg, C.R.; Woolsey, C.A. Modeling, identification, and control of an unmanned surface vehicle. J. Field Robot. 2013, 30, 371–398. [Google Scholar] [CrossRef]
- Van Gestel, T.; De Brabanter, J.; De Moor, B.; Vandewalle, J.; Suykens, J.A.K.; Van Gestel, T. Least Squares Support Vector Machines; World Scientific: Singapore, 2002. [Google Scholar]
- Zhang, X.-K.; Zhang, G.-Q.; Ren, H.-X.; Yang, G.-P. Linear reduction of backstepping algorithm based on nonlinear decoration for ship course-keeping control system. Ocean. Eng. 2018, 147, 1–8. [Google Scholar] [CrossRef]
- Qin, Y.; Ma, Y. Parametric Identification of ship’s Maneuvering Motion Based on Improved Least Square Method. In Proceedings of the 2014 International Conference on Mechatronics, Electronic, Industrial and Control Engineering (MEIC-14), Shenyang, China, 15–17 November 2014; Atlantis Press: Amsterdam, The Netherlands, 2014. [Google Scholar]
- Hu, Y.; Xu, S. A direct generalized predictive controller for ship course keeping. In Proceedings of the 2007 Mediterranean Conference on Control & Automation, Athens, Greece, 27–29 June 2007; pp. 1–4. [Google Scholar]
- Xie, S.; Chu, X.; Liu, C.; Wang, L.; Mao, W. Ship heading control based on backstepping and Least squares support vector machine. In Proceedings of the 2017 4th International Conference on Transportation Information and Safety (ICTIS), Banff, AB, Canada, 8–10 August 2017. [Google Scholar]
- Chunyu, S.; Zhang, X.; Zhang, G. Nonliner Identification For 4 DOF Ship Maneuvering Modeling Via Full-Scale Trial Data. IEEE Trans. Ind. Electron. 2021, 69, 1829–1835. [Google Scholar]
- Hess, D.; Faller, W. Simulation of ship maneuvering using recursive neural networks. In Proceedings of the 23rd Symposium on Naval Hydrodynamics, Val de Reuil, France, 17–22 September 2000. [Google Scholar]
- Zhang, X.; Wang, X.; Meng, Y.; Yin, Y. Research progress and future development trend of ship motion modeling and simulation. J. Dalian Marit. Univ. 2021, 47, 1–8. [Google Scholar]
- Zhang, G.Q.; Zhang, X.K.; Pang, H.S. Multi-innovation auto-constructed least squares identification for 4 DOF ship maneuvering modelling with full-scale trial data. Isa Trans. 2015, 58, 186–195. [Google Scholar] [CrossRef]
- Xie, L.B.; Feng, D.; Wang, Y. Auxiliary model-based identification method for quantized control systems. Kongzhi Lilun Yu Yinyong/Control. Theory Appl. 2009, 26, 277–282. [Google Scholar]
- Ruichek, Y. Multilevel- and neural-network-based stereo-matching method for real-time obstacle detection using linear cameras. IEEE Trans. Intell. Transp. Syst. 2005, 6, 54–62. [Google Scholar] [CrossRef]
- Zhang, X.G.; Zou, Z.J. Black-box modeling of nonlinear hydrodynamic model for ship maneuvering based on support-vector-regression. In Proceedings of the International Conference on Marine Simulation and Ship Maneuverability 2012 (MARSIM 2012), Singapore, 23–27 April 2012. [Google Scholar]
- Zhang, X.G.; Zou, Z.J. Black box modeling of ship maneuvering motion based on support vector machine. J. Beijing Univ. Aeronaut. Astronsutics 2013, 11, 025. [Google Scholar]
- Xie, S.; Chen, D.; Chu, X.; Liu, C. Improved multi-innovation Kalman filter method to identify ship response model. J. Harbin Eng. Univ. 2018, 39, 8. [Google Scholar]
- Bai, W.; Ren, J. Multi-Innovation Gradient Iterative Locally Weighted Learning Identification for A Nonlinear Ship Maneuvering System. China Ocean. Eng. 2018, 32, 288–300. [Google Scholar] [CrossRef]
- Perez, T.; Fossen, T. Time-domain models of marine surface vessels based on seakeeping computations. In Proceedings of the 7th IFAC Conference on Maneuvering and Control of Marine Vessels MCMC, Lisbon, Portugal, 20–22 September 2006. [Google Scholar]
- Ross, A. Nonlinear Maneuvering Models for Ships: A Lagrangian Approach. Ph.D. Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2008. [Google Scholar]
- Randeni, P.S.; Forrest, A.L.; Cossu, R.; Leong, Z.Q.; Ranmuthugala, D.; Schmidt, V. Parameter identification of a nonlinear model: Replicating the motion response of an autonomous underwater vehicle for dynamic environments. Nonlinear Dyn. 2018, 91, 1229–1247. [Google Scholar] [CrossRef]
- Haseltine, E.L.; Rawlings, J.B. Critical Evaluation of Extended Kalman Filtering and Moving-Horizon Estimation. Ind. Eng. Chem. Res. 2005, 44, 2451–2460. [Google Scholar] [CrossRef]
- Krstic, M.; Kanellakopoulos, I.; Kokotovic, P.V. Adaptive Nonlinear Control Without Over Parametrization. Syst. Control. Lett. 1992, 19, 177–185. [Google Scholar] [CrossRef]
- Salid, S.; Jenssen, N.A. Adaptive Ship Autopilot with Wave Filter. Model. Identif. Control. 1983, 4, 33–46. [Google Scholar] [CrossRef]
- Gupta, S.; Kambli, R.; Wagh, S.; Kazi, F. Support-Vector-Machine-Based Proactive Cascade Prediction in Smart Grid Using Probabilistic Framework. IEEE Trans. Ind. Electron. 2015, 62, 2478–2486. [Google Scholar] [CrossRef]
- Qin, P.; Lv, G.; Liu, M.; Miao, Q.; Chen, X. Research and Application of Moving Target Tracking Based on Multi-innovation Kalman Filter Algorithm; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Ding, Y.K.; Meng-Hong, Y.U. Parallel EKF Identification Methods for Mathematics Model of Ship. Ship Eng. 2015, 1, 72–74. [Google Scholar]
- Chen, B.; Dang, L.; Gu, Y.; Zheng, N.; Príncipe, J.C. Minimum Error Entropy Kalman Filter. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 5819–5829. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, G.; Zhang, Q.; Zhang, G.; Zhang, Y. Improved Concise Backstepping Control of Course-Keeping for Ships Using Nonlinear Feedback Technique. J. Navig. 2017, 70, 1–14. [Google Scholar] [CrossRef]
- Lv, G.H.; Qing, P.L.; Miao, Q.G. Research of Extended Kalman Filter Based on Multi-innovation Theory. J. Chin. Comput. Syst. 2016, 37, 576–580. [Google Scholar]
- Luo, W.; Zou, Z.; Xiang, H. Simulation of Ship Maneuvering in the Proximity of a Pier by Using Support Vector Machines. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Conversion from Gaussian and CGS EMU to SI |
|---|---|
| Length between perpendiculars | |
| Breadth | |
| Mean draft | |
| Displacement volume | |
| Height of the initial stability | |
| Block coefficient | |
| Rudder area | |
| Aspect ratio | |
| Max. rudder angle | |
| Max. rudder rate | |
| Propeller diameter | |
| Speed | |
| Max. shaft velocity |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, C.; Zhang, X.; Zhang, G. Nonlinear Innovation-Based Maneuverability Prediction for Marine Vehicles Using an Improved Forgetting Mechanism. J. Mar. Sci. Eng. 2022, 10, 1210. https://doi.org/10.3390/jmse10091210
Song C, Zhang X, Zhang G. Nonlinear Innovation-Based Maneuverability Prediction for Marine Vehicles Using an Improved Forgetting Mechanism. Journal of Marine Science and Engineering. 2022; 10(9):1210. https://doi.org/10.3390/jmse10091210
Chicago/Turabian StyleSong, Chunyu, Xianku Zhang, and Guoqing Zhang. 2022. "Nonlinear Innovation-Based Maneuverability Prediction for Marine Vehicles Using an Improved Forgetting Mechanism" Journal of Marine Science and Engineering 10, no. 9: 1210. https://doi.org/10.3390/jmse10091210