Abstract
Container seaport congestion is a challenging problem in improving the service level and optimizing evacuating container vessels after congestion. There is a lack of research on container vessel evacuation strategies for continuous terminals. In this article, the weight of the objective function is regarded as the index for the service priority of vessels. The effects of the service priority on the continuous terminal are analyzed by establishing a mixed integer programming model. The model minimizes the total weighted delay departure time of vessels. Two sets of weight values are adopted, including handling volume of each ship and the squared handling volume, then the optimization results are compared with the unweighted scenario. The model is solved using a genetic algorithm. Lianyungang Port is selected as a case study. The results show that the method using the square of handled container volume is more conducive to ensuring the shipping period of large vessels after congestion. Besides, the quay crane number of large vessels affecting the scheduling strategy is discussed. The method proposed in this article provides a new idea for arranging scheduling strategies in other ports under congestion situations, which can better ensure the planned shipping period of large vessels.
1. Introduction
Container ship transportation generally affects the entire maritime supply chain in global trade. The container freight throughput volume of Chinese ports in 2021 was 2884.3 thousand TEUs (Twenty-feet Equivalent Unit, TEU) [1]. However, container port congestion has become a new challenge in the supply chain, especially after the outbreak of COVID-19 [2]. The container port encounters congestion generally because of external factors including: sea fog; hurricanes; epidemics; the shortage of empty containers; the delay of land transportation; and internal factors such as fewer workers, insufficient or poorly maintained handling equipment, limited yards and poor management [3]. The container vessels are forced to stay at anchorage and the handling operations are stopped once the port is congested. During this period, arriving ships are required to berth at anchorages outside the port. Port congestion causes delays in shipping companies’ schedules and low production efficiency in ports [4]. Greenhouse gas emissions from vessels are an important cause of port pollution [5]. Addressing port congestion can reduce air pollution from ports [6,7,8,9]. Therefore, in order to ensure efficient port operations and just-in-time arrival at port, port operators are actively seeking for decision support methods based on optimization in handling vessel evacuation problems after port congestion.
Vessel evacuation decisions are generally made artificially considering the size and urgency of vessels. Because berthing and handling processes of the large-scale container vessels are more time-consuming than small ones, large vessels cost more for the same delay departure time [10]. To enhance the service satisfaction and ensure the shipping period, large vessels should be given higher service priority than other ships. Thus, it is necessary to optimize the integrated berth allocation and quay crane assignment problem (BACAP) in container terminals when large container vessels are more and more used [11].
The integrated BACAP has become a major issue in port management. The berth layout types include discrete berth, continuous berth, and hybrid berth [12]. The continuous berth layout is widely used in coastal ports. When there is a significant difference in the types and lengths of the arriving vessels, continuous berth layout can make fuller use of limited shoreline resources than discrete layout. Most of the existing literature is discrete layout, and the continuous layout is solved after discretization of quay line [13]. For example, Malekahmadi, et al. [14] divided the continuous quay length into 20-unit lengths in the solution of meta-heuristic algorithms. Zheng, et al. [15] discretized the terminal line into 100-metre segments when minimizing the total turnaround time of vessels for the BACAP. Liu, et al. [16] utilized 10-metre segments in dealing with BACAP by artificial fish swarm algorithm. Correcher, et al. [17] compared the results for discretization of quay length to 10 and 50 meters in continuous BACAP and considered a finer discretization can produce better solutions. Tang, et al. [18] proposed a discretization strategy in dealing with continuous berth layout and the continuous problem was transformed into a discrete optimization problem. In the current studies, the discretization accuracy of the quay has not been improved to one meter. Thus, it is necessary that the optimization is more refined with the automation and intelligence development in port and the increasing number of large vessels.
The integrated BACAP basically includes the berth allocation problem (BAP) and the quay crane assignment problem (QCAP). BAP addresses the quay space and berth time assignment. QCAP deals with the assigned number of quay cranes (QC) to a certain vessel. One integrated approach is to solve one problem by giving precise solution of another problem under particular circumstance. Another method is to use the relationship between the two problems by solving two problems alternately so that the decision space is restricted by each other [19]. Methods for solving the scheduling problem include exact method and heuristic algorithm. Exact methods, such as the branch and bound method, the branch and cut method and cutting plane method etc., depend more on the quality of the bounds. Wang, et al. [20] applied a branch and bound method to solve the integrated BACAP. Agra and Oliveira [21] adopted a branch and cut approach in an integrated berth allocation and quay crane assignment and scheduling problem. Iris, et al. [13] presented the cutting planes in the lower bound calculation procedure. Turkogullari, et al. [22] used cutting plane algorithm to satisfy condition for generating an optimal solution. Li, et al. [23] developed an exact solution approach on a dynamic programming algorithm in solving ship routing and scheduling problem. However, there are great difficulties in obtaining exact solution, especially the scale of the problem is large [24]. Thus, heuristic approaches are applied to calculate approximate solutions in these integrated problems. These methods include genetic algorithm (GA) [15,25,26,27,28,29], tabu search [30], simulated annealing [31], and particle swarm optimization [32] etc. For example, Imai, et al. [29] employed GA to obtain a solution for simultaneous berth and crane allocation problem. Wang, et al. [33] solved the integrated berth allocation, quay crane assignment, and yard assignment problem on large-scale instances by column generation based heuristic algorithm. Cao, et al. [34] proposed a logic-based benders decomposition algorithm in a joint berth allocation and ship loader scheduling problem. Jiang, et al. [35] developed GA, combining a simulated annealing mechanism and greedy construction strategy in the integrated berth and crane scheduling problem.
The allocation strategies for vessels mainly include first-come-first-served (FCFS), last-come-first-served (LCFS) and first-served with priority. The service rule of vessels in most literature is FCFS. There are a few studies deciding service order according to priority. Cheong, et al. [36] defined the priority value under either FCFS or LCFS rule is incremented from one. As for first-served with priority, the service priority can be defined by the vessel size or handling volume. Imai, et al. [10] gave priority to megaships and ensured them berthing without delay in the multi-user container terminals. Tang, et al. [37] developed the berth allocation model with service priorities to analyze the relationship between the scale of container vessels and shipping companies. Imai, et al. [38] selected the container volume, squared value of container volume, 1, the reciprocal of the container volume, and the reciprocal of the container volume squared as the weight for every ship in solving discrete BACAP. Zhang and Zhao [39] defined the weights with the ratio of unloading volume and a constant number. Besides, Xu, et al. [40] developed the model with weight randomly generated according to a discrete uniform distribution within one to ten. In this article, the container handling volume and squared value of handling volume were chosen to study the effect of service priority on the different vessel types in continuous BACAP.
Container port congestion puts tremendous pressure on normal port operations. Stergiopoulos, et al. [41] investigated methods for detecting large-scale traffic congestion between interconnected ports and ship routes in the maritime network. To alleviate congestion, Xu, et al. [42] proposed increasing the transport infrastructure, multimodal transport, smart strategy, and interconnection as solutions to port congestion. Dulebenets [43] proposed a new adaptive island evolutionary algorithm in the berth scheduling problem by minimizing the total weighted service cost of vessels. In order to mitigate container port congestion when the number of feeders is evidently larger than the number of deep-sea vessels, Jia, et al. [44] studied the way to allocate berths to deep-sea vessels and schedule arrivals of feeders. Song and Wang [45] indicated the waiting time of ships is an important indicator of port congestion. The causes of port congestion were not discussed in depth in this article, but the evacuation strategy of vessels after port congestion was mainly analyzed. In addition, the impact of scheduling strategies on different types of ships was also explored.
A large number of research efforts on port scheduling provide theoretical references and research methods for the study of scheduling after container port congestion. The existing research on ship service priority is mostly intended for discrete berth, and many studies compare the differences between optimization algorithms, but there is a lack of research on continuous berth layout considering the vessel service priority at the same time. This article discussed the influence of service priority on evacuating vessels by solving the integrated continuous berth allocation and quay crane assignment problem. The model was solved by GA on the goal of minimizing the total weighted delay departure time. The calculation accuracy of ship berthing location was set to one meter. The model is designed to handle service priority by two systematic values related to loading and unloading volume. The trend of large-scale container vessels is significant at Lianyungang Port, but port congestion caused by special weather has put pressure on the port operations. In 2015, affected by the strong cold air, the wind in the Lianyungang sea area was as high as level 8 to 9, and ships entering and leaving the port were stopped. A total of 46 vessels were anchored at anchorages and 38 vessels were stranded in the port [46]. Thus, Lianyungang Port was chosen as a case to compare the influence of service priority indices in determining the operating sequence of congested vessels. Note that the research method proposed in this article can be also applied to other container ports.
The rest of the article is organized as follows. Section two gives the description of the BACAP, and then establishes corresponding mathematical model. Section three introduces the GA used in this study, including the structure of chromosome, the design of fitness function, the use of crossing and mutation operators, and the selection method of chromosome. Section four conducts a serious of mathematical experiments and analysis of the solutions of the models, then section five discusses the effect of the number of quay cranes allocated to large vessels. Finally, the conclusions and future work are presented.
2. Problem Description and Model Formulation
To enhance the operation efficiency and service level of the container port and reduce the impact of port congestion on large vessels, the berth allocation problem under congestion situation was studied. The service satisfaction of the vessel is considered to be related with the delay of departure time [47]. The longer the delay departure time, the more dissatisfied the vessel is with the port service. Due to the limitation of the schedule of the next port in the voyage, large vessels are more demanding to leave the port on time than small ones. Therefore, this research aims to minimize the total weighted delay departure time of vessels, and then explores the impact of different types of weight on the vessel’s service sequence, time in the port, and the delay time, etc. In the setting of service priorities, the loading and unloading volume was selected as the determining index. Two weighting rules proposed in this article are handling volume of each ship and the squared loading and unloading volume. The unweighted scenario means that the weight equals to constant 1.
During the evacuation period, as there are already many vessels waiting to berth, all upcoming vessels will be temporarily moored at anchor and will not be considered for the study. The vessels already in port area can be arranged to berth after congestion situation if the remaining terminal is long enough. If the berthing conditions could be satisfied, vessels enter the berthing area to berth directly. Before carrying out loading and unloading operations, the vessel leaves the anchorage and enters the designated location under the guidance of the scheduling department. The handling process is carried out directly by the quay cranes. Their locations are stochastically distributed when no vessel is at the terminal, and the quay cranes are considered to be the same type. The processing time is inversely proportional to the assigned number of quay cranes [25]. The quay crane number is considered to be constraint condition in the model. A vessel can leave the port once finishing handling process.
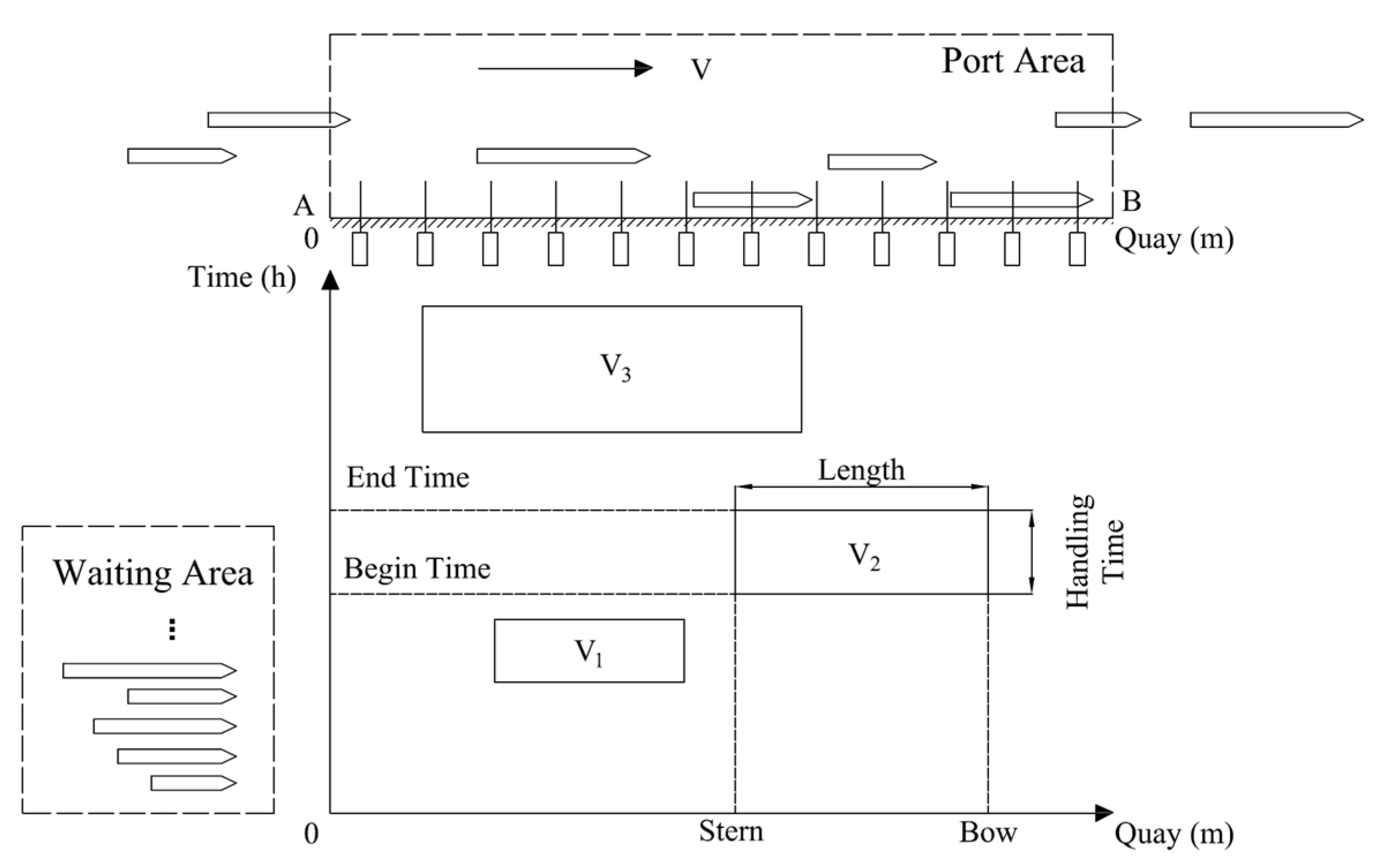
The whole problem can be abstracted as a two-dimensional problem [48] illustrated in the lower part of Figure 1. In the established model, the movement of the vessel is projected to the direction of the shoreline after entering the port area, and the transverse movement perpendicular to the shoreline is ignored (the upper part of Figure 1). Vessels are represented by rectangles, of which the length and the height corresponds to the ship length and the handling time, respectively. The coordinate of lower-left vertex is the distance away from the origin and the beginning handling time. The vessels in the study are set to be waiting in the same anchorage area, so the initial coordinate of each vessel is its negative ship length.
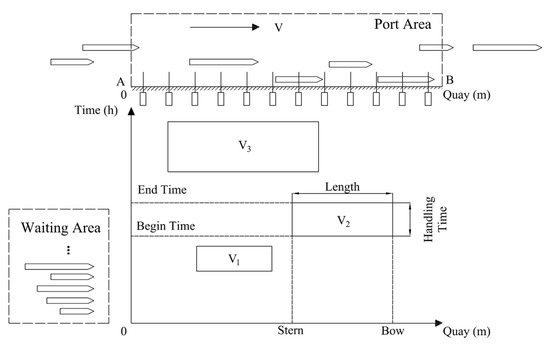
Figure 1.
Two-dimensional diagram of integrated BACAP for continuous berth layout.
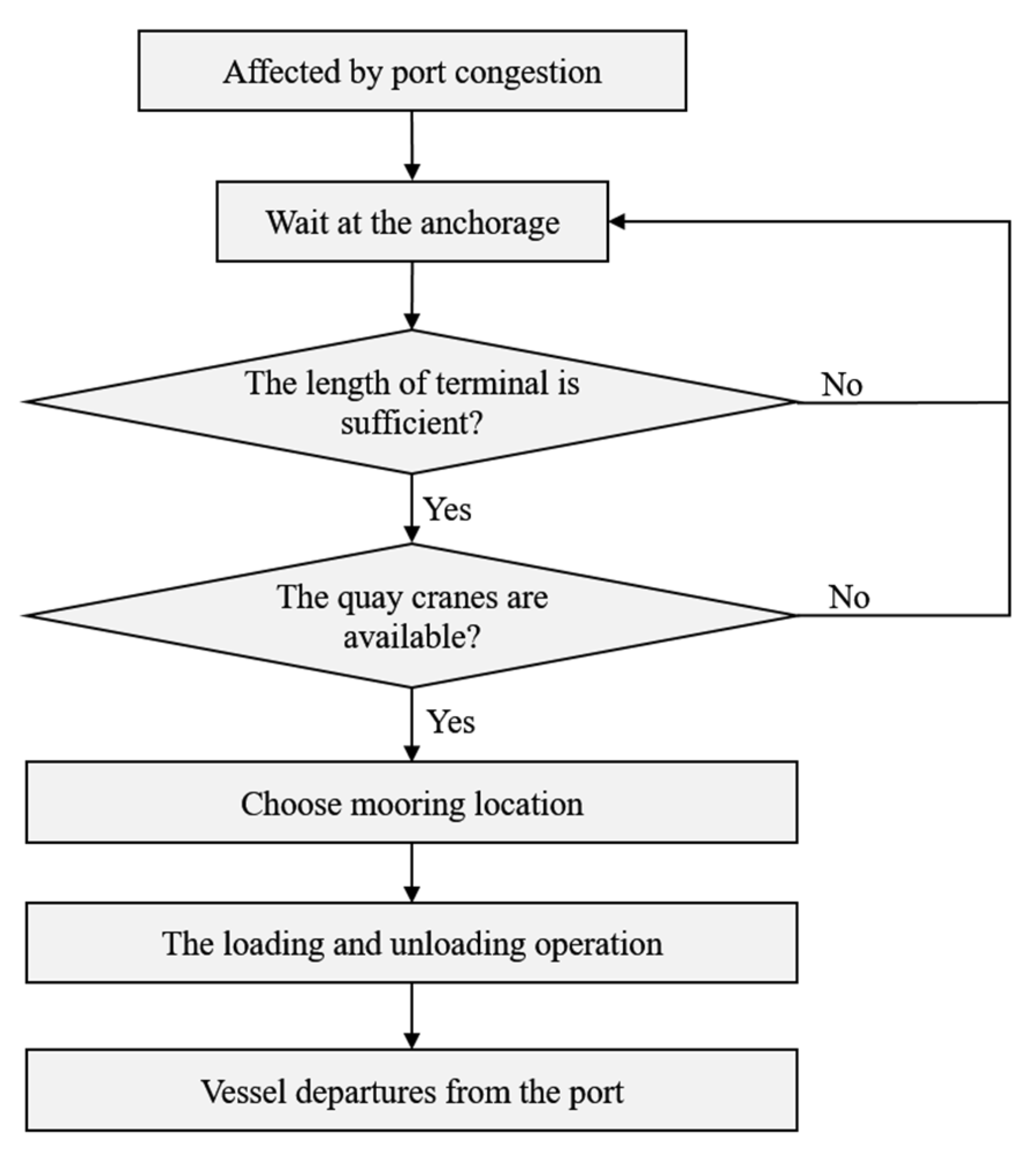
The whole scheduling processes are shown in Figure 2. As for continuous berth layout, firstly, vessels must be berthed at locations where the total length of all vessels in quay including safety margins is less than total quay length. Secondly, it should be considered whether the remaining quay cranes are enough for the vessel in the loading and unloading processes before deciding a definite location. If these requirements are unsatisfied, the vessel must stay in the waiting area. Thirdly, the vessel will leave the port immediately after completing the handling operation.
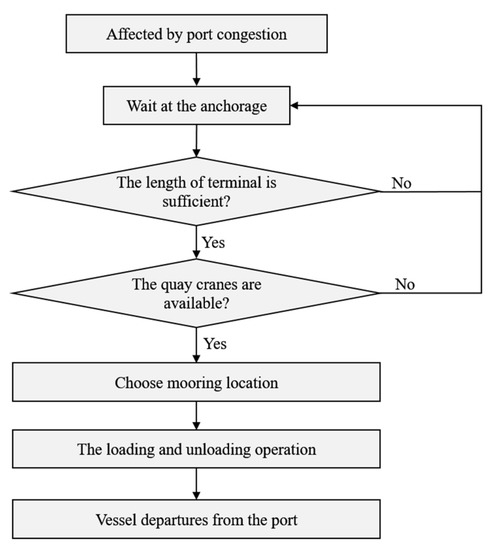
Figure 2.
Flow chart of the integrated BACAP model.
2.1. Parameters
The notations used in the article are listed below.
: Length of quay, m
: Set of all vessels of planning horizon,, where is the number of vessels
: Indices of vessels
: Length of planning horizon, h
: Number of all the quay cranes
: Total length of vessel and safety clearance, m
: Maximum and minimum number of available quay cranes for vessel
: Arriving time for vessel , h
: Expected departure time for vessel , h
: Handling efficiency of per quay crane, TEU/h
: Handling time for vessel , h
: Weight of vessel
: Handling volume for vessel , TEU
Decision variables:
: Departure time for vessel , h
: Berthing time for vessel , h
: Berthing location of vessel , m
: Number of used quay cranes for vessel while handling
: Set to 1 if vessel is berthed at the berth area at time , 0 otherwise
: Set to 1 if vessel is berthed on the leftmost side of the quay at time , 0 otherwise
: Set to 1 if vessel is berthed on the rightmost side of the quay at time , 0 otherwise
: Set to 1 if vessel is berthed between vessel and at time when the is the minimum of all the available location, 0 otherwise. Note that vessel and vessel is on the left and right of the vessel , respectively.
2.2. Basic Assumptions
The assumptions made in this model are given below.
(1) All the new arriving vessels are controlled to stop in the anchorage outside the port. These vessels are not included in the model;
(2) The water depth of the interest area is sufficient. The water area can satisfy the requirements of vessels berthing at any location;
(3) The berthing position of a vessel is determined on the side closest to the direction of arrival within the available shoreline. Each vessel can be docked only once;
(4) Regardless of other factors, the loading and unloading time is only related to the number of assigned quay cranes. The hourly handling volume of each crane is considered to be the same;
(5) The number of quay cranes is within the maximum and minimum number of available quay cranes. The cranes working at the same time have no interaction with each other. They can move along the track but crossing each other is not allowed. Once a ship is being loaded and unloaded, the assigned number of quay crane is constant, but the quay cranes can be adjusted if needed. The time for adjustment is ignored.
2.3. Model Formulation
In order to solve the scheduling problem of continuous terminal, the model was reformulated. The decision variable was defined as a continuously changing integer variable. The weight was given by the three definition methods proposed by [38]. The objective function of the model is to minimize the total weighted delay departure time of vessels, which can be used to indicate the service efficiency of the port [49]. The proposed formulations are given as below:
Equation (1) is the objective function. Constraint (2) guarantees that the vessels begin to berth only after arriving at the port and the departure time is later than berthing time. Constraint (3) ensures that all the vessels must be berthed within the area of the quay. Constraint (4) restricts that the number of assigned quay cranes is not only less than the given maximum number but also over the minimum number. Constraint (5) ensures that the number of quay cranes used in operation processes cannot exceed the total number of available cranes at any moment. Constraints (6–8) define the space restrictions of the vessels and guarantee that the locations of vessels along the quay have no conflict at any time. Constraint (9) is the definition of weights for vessels of different freight volume, which indicates that the weight is greater with the increase of the freight volume of the vessel. Constraint (10) denotes the handling time of each vessel with different quantities of containers. Constraint (11) defines the composition of the departure time. Constraints (12–17) give the range of the corresponding parameters used in the study.
3. Solution Method
BAP has been proven to be a NP-Hard problem with high computational complexity [50]. The BACAP is more complex than the BAP. To obtain a satisfied solution in a reasonable CPU time, the genetic algorithm (GA) is applied to figure out the problem. The GA has shown good performance in tackling this kind of problem [26,51]. The objective function value found by the GA is close to the global optimum [52]. GA is inspired by the natural selection process. The first generation of a population consists of many randomly generated chromosomes that represent the solutions, then the new generation will be produced after an iteration with crossover, mutation, and selection [25]. The iterations will end until the fitness functions are satisfied.
3.1. Chromosome Structure and Initialization
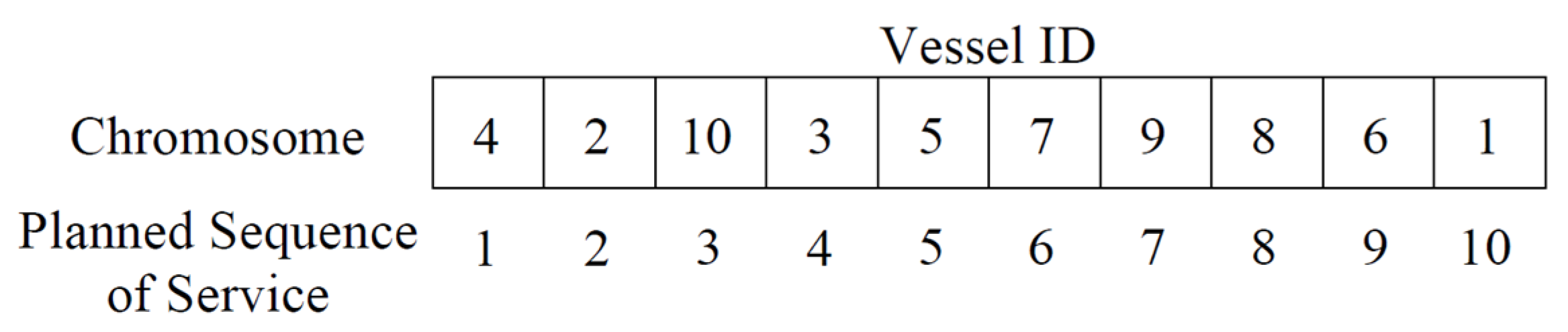
The chromosome was encoded using a string of the vessel number in the order of entering the port. An example of the chromosome is shown in Figure 3. The chromosome given in the example shows that 10 vessels waiting for entering the port in order are vessels 4, 2, 10, 3, ⋯, 1.
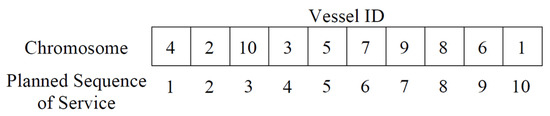
Figure 3.
Chromosome structure representation.
A population is initialized through random function before starting to search for a satisfactory solution. The population size is generally set to be 30–100. The convergence speed is faster with the increase of the number of individuals, but the total computing time is longer [51].
3.2. Fitness Evaluation
The fitness of the chromosome is evaluated during each generation, and the next generation with the best fitness value is selected [53]. Thus, the average fitness value of the current generation is gradually increased. In this article, the model dealt with minimization problems, and the smaller objective function value is, the larger fitness evaluation value should be. The fitness evaluation value is inverse proportion to the objective function value consequently. The reciprocal of the objective value is widely used in the literature and was selected in this study [25,54,55,56]. The function is given below.
3.3. Crossover
The crossover is one way to introduce new individuals by recombining current genes [57]. Crossover operator plays an important role in GAs. There are many types of crossover operators [58], such as Partially Mapped Crossover (PMX), Simulated Binary Crossover (SBX) and Cycle Crossover (CX). PMX crossover operator is particularly suitable in solving order-based problems [59], so the PMX was used to generate the offspring of next generation. The process of the PMX includes three steps. First, two chromosomes are chosen from the present population randomly, then two random points of the same position are selected on the two parent chromosomes. Second, the corresponding segments between two points are exchanged. Third, the repetitive genes on the non-matched segments are replaced according to the correspondence of the alleles on the matched segments.
3.4. Mutation
The mutation operator is used to maintain the diversity of the population in the generations and to fully exploit the solution space. Inverse mutation operator was employed for the entry order of vessels on the chromosome. Genes located between the two randomly selected points are placed in reverse order during the inverse mutation [60].
3.5. Selection
The parent selection is of great significance to the natural reproduction of the population. The aim of this process is to choose the chromosomes from the current population and create offspring for the next generation. For the selection operator, roulette wheel selection method [51] is widely used in the genetic algorithm. First, the fitness values of the chromosomes are normalized so that all fitness values are between 0 and 1. Second, the current population is sorted by descending fitness values and accumulating normalized fitness values. Third, a random number is generated between 0 and 1, then the first individual is found whose accumulated normalized value is greater than . All the fitness values were normalized as follows.
where is the normalized fitness value for individual chromosome , is the sum of the fitness values of all the chromosomes in the current population.
4. Results
All the computations of the study were programmed by MATLAB language and conducted on an Intel(R) Core(TM) i7–8700 @ 3.20GHz processor (Intel Corporation, Santa Clara, CA, USA).
4.1. Computational Experiments
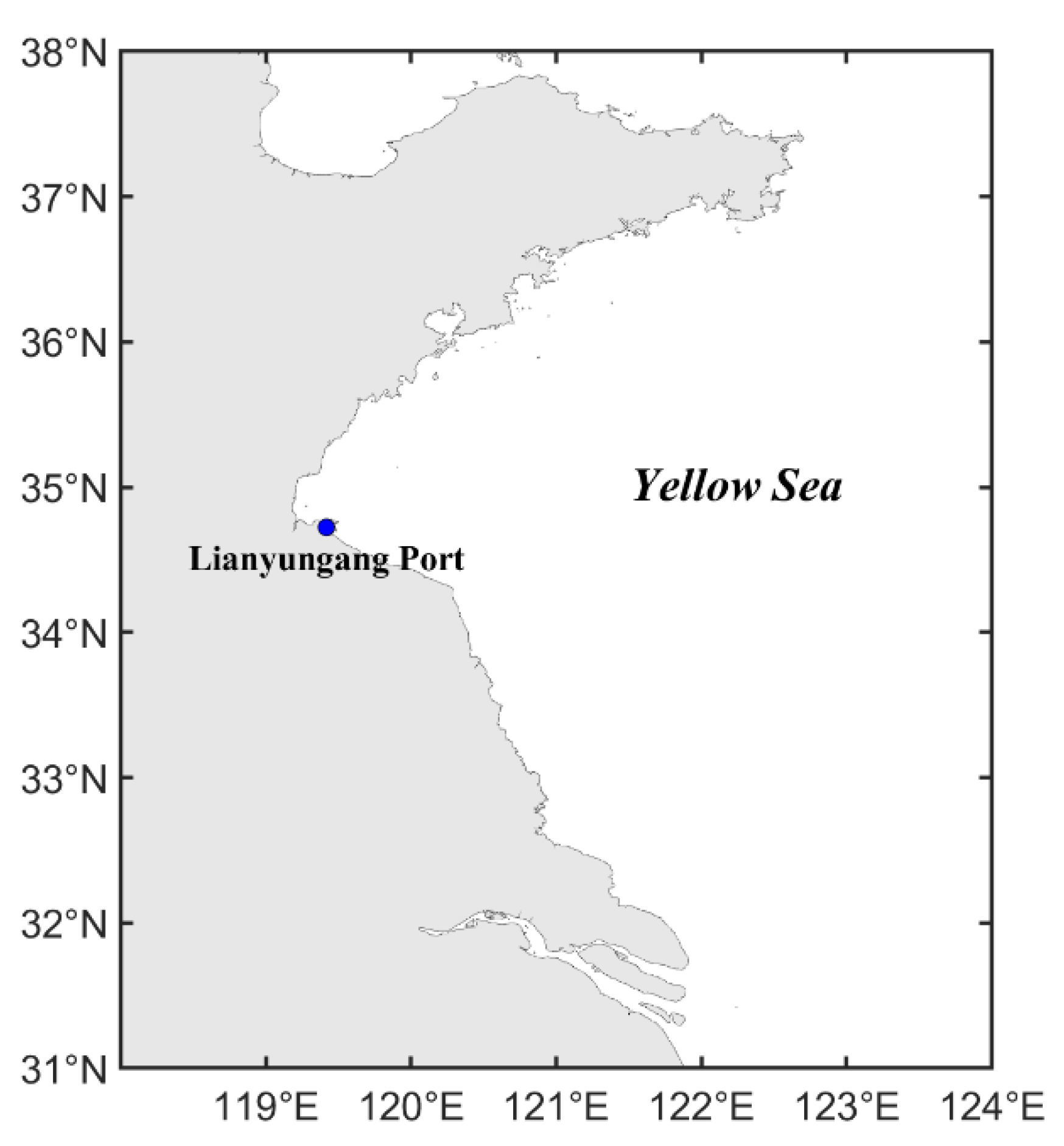
A series of computational experiments are performed at Lianyungang Port to explore the effects of different service priorities on the BACAP. Lianyungang Port is the largest seaport in Jiangsu Province in China and has better waterway transportation advantages over other inland ports (Figure 4). The container transportation is located in the Miaoling operation area in the port. A section of continuous container shoreline in the operation area is selected as an example. The chosen shoreline is 1220 m in length, and the safety distance between the two vessels is 30 m. There are 14 quay cranes along the quay side, the loading and unloading efficiency is 30 TEUs per hour. All the arrival container vessels in Miaoling operation area are composed of 20,000-ton and 100,000-ton ones.
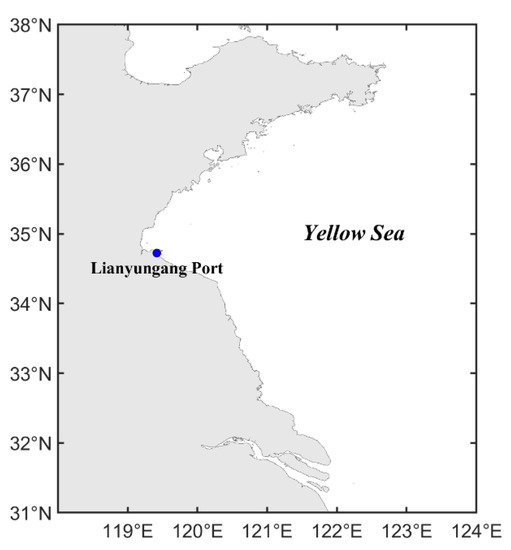
Figure 4.
The location of Lianyungang Port.
4.2. Parameter Setting
The planning period is 48h. All the vessels delayed in the port have been waiting to be served in this study because of congestion. 10 vessels are included in each case, of which 100,000-ton and 20,000-ton vessels occupies 20% and 80%, respectively. The proportion of vessels is obtained according to the available historical arrival data. Note that two types of container vessels are used, but for container ports with multiple ship types, the research method present in this study is still applicable. The average speed of the vessels is 3 knots/h in the port. The loading and unloading volume were determined by the ship length according to a linear relationship according to the statistical results of arrival vessels. The planned departure time of the vessel was a linear function of the loading and unloading volume. The planned departure time of a vessel should be greater than the time of the vessel’s loading and unloading operations calculated on the basis of the maximum allocated number of quay cranes. The parameters for generating instances are listed in Table 1 and a set of instances are shown in Table 2.

Table 1.
Ship parameters for generating instances.
Table 2.
Vessels information of a set of instances.
For the vessels waiting to enter the port, the berthing order was randomly selected. The berthing location was selected preferentially close to the entrance side of the port. The number of quay cranes was generated randomly with its upper and lower bounds. The model was solved using GA. The population consisted of 100 individual chromosomes. The maximum evolutionary algebra was 100 generations. During the genetic operation, the crossover probability and mutation probability were 0.9 and 0.1, respectively.
4.3. Experimental Results
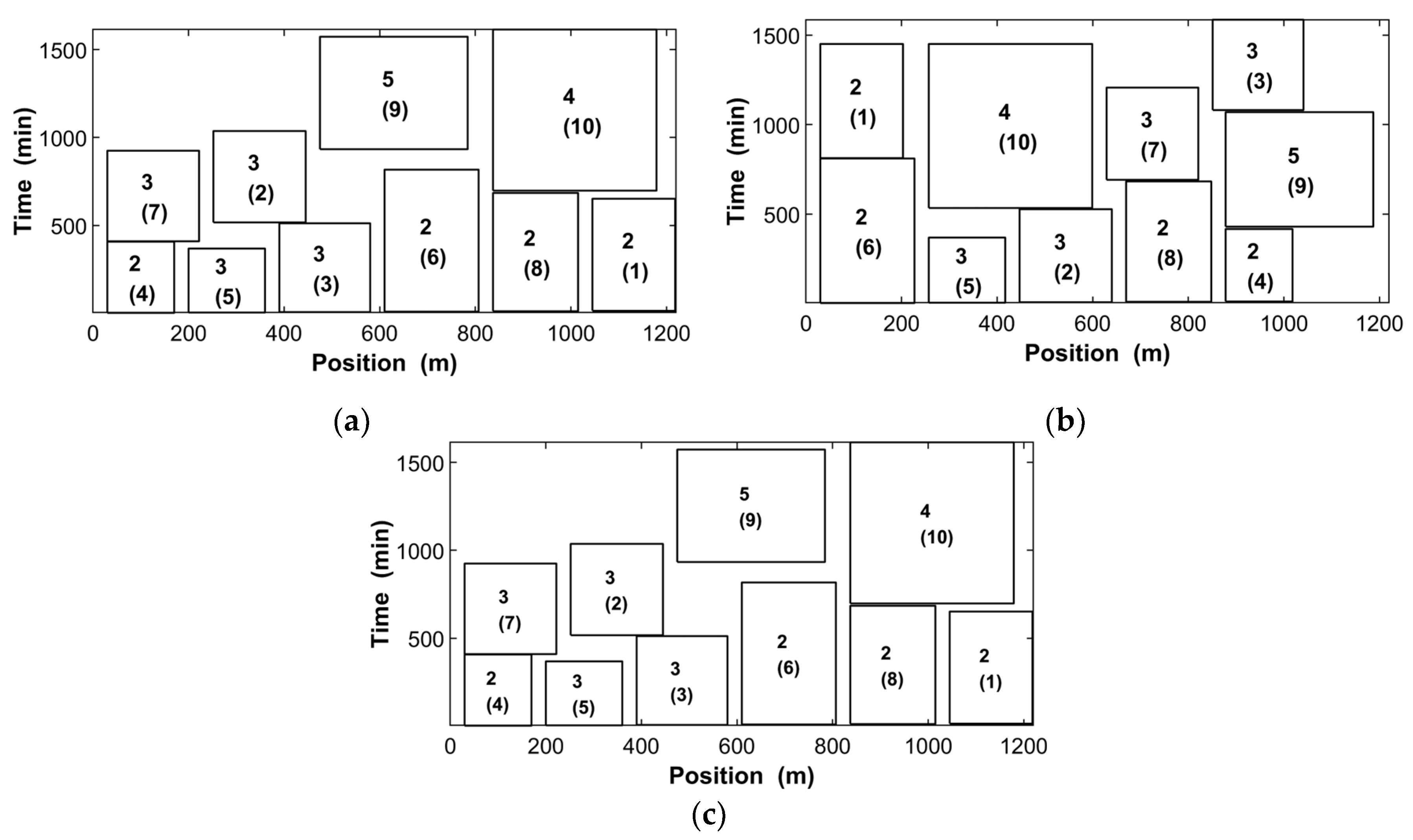
Two scenarios, where the objective functions are weighted by the handling volume of each vessel and the squared handling volume, have been calculated through the model. In order to eliminate the randomness of the numerical experiment results, 10 sets of repetitive experiments were performed in calculating each instance [61]. Affected by the high accuracy of ship berthing location, the average calculation time of each case is around one hour. The results of integrated BACAP are compared in Table 3, including the berthing time, berthing location, the number of quay cranes assigned to vessels, operating order, time of vessels at the port, delay departure time and the waiting time for berthing. Table 4 lists the berthing order of the 10 vessels under unweighted scenario and two different service order determination rules. The berthing order in the Table 4 is the set of numerical experiment closest to the average level of 10 group experiments. Figure 5 is a schematic diagram of the berthing time and location of a vessel. The numbers in the middle of the rectangle demonstrate the number of quay cranes used by the vessel and the vessel ID. For example, 2 (4) means two quay cranes are used for operating the No. 4 vessel. The calculation results show that the algorithm in the study is reliable, and the scheduling strategy can make full use of the shoreline.
Table 3.
Results comparisons of objective function 1 and objective function 2.
Table 4.
Berthing order results under different service priorities.

Figure 5.
Time-location diagrams under different service priorities. (a) ; (b) ; (c) .
The service priority has a significant impact on the operation sequence in the port. Weighting by the squared loading and unloading volume of vessels () expands the weight gap between large and small vessels. The maximum weight under scenario is 20.5 times of the minimum weight, and the maximum weight under scenario is 4.5 times of the minimum weight. Therefore, scenario is more conductive to promoting the priority of large vessels. The average operation sequence for large vessels is advanced with the increase in weight gap from the Case 1 to Case 3, but the average order for small vessels is postponed. However, the average operation sequence of large vessels increases more than the value of small vessels decreases. When the service priority is determined according to and , the average operation sequence of large vessels is 19.35% and 45.16% earlier than that determined in Case 1, respectively. The average operation sequence of small vessels in Case 2 and Case 3 is delayed by 9.89% and 23.08% than the result in Case 1, respectively.
Large vessels take up more quay space and cranes than small ones. Prioritizing loading and unloading large vessels will cause small vessels waiting longer. It can be found that the average delay departure time for large vessels decreases from the cases of weighting by 1, and . The value determined by and scenario is 45.24% and 7.85% of the time calculated in Case 1, respectively. The average delay departure time for small vessels increases with the changes from Case 1 to Case 3, and the time calculated by and scenario is 1.82 and 4.26 times of the value from unweighted case, respectively. The average time of large vessels at port decreases from the Case 1 to Case 3, but the value increases for small vessels. The average time of large vessels at port of weighting method and is 85.27% and 66.04% of the time calculated in unweighted Case 1 respectively, and the time for small vessels is 1.03 and 1.41 times of the value from Case 1 respectively.
As for total delay departure time of vessels and total waiting time for berthing, both indices increase as the weighting method changes from 1 to . There is no obvious difference when calculating total delay departure time of vessels, total time of vessels at port and total waiting time for berthing by Case 2 with those determined by unweighted Case 1. However, the three time indices obtained from weighted scenario increase 1.94, 1.14 and 1.53 times of the results from the unweighted case. Overall, the weighting rules of and have less influence on the average operation sequence of small vessels, but the service level of large vessels is greatly improved with as the index of service priority.
5. Discussion
The influence of service priority and total delay time of vessels have been taken into consideration in the model by attaching a weight of or to the vessels, which artificially advances the operation sequence of large vessels. When there are strict requirements on the shipping period of large vessels, the weighting method is beneficial to guarantee the interests of both the port and the shipping companies. Compared to weighted and unweighted scenarios, is more recommended to determine the operation order of vessels while arranging the scheduling tasks after port congestion.
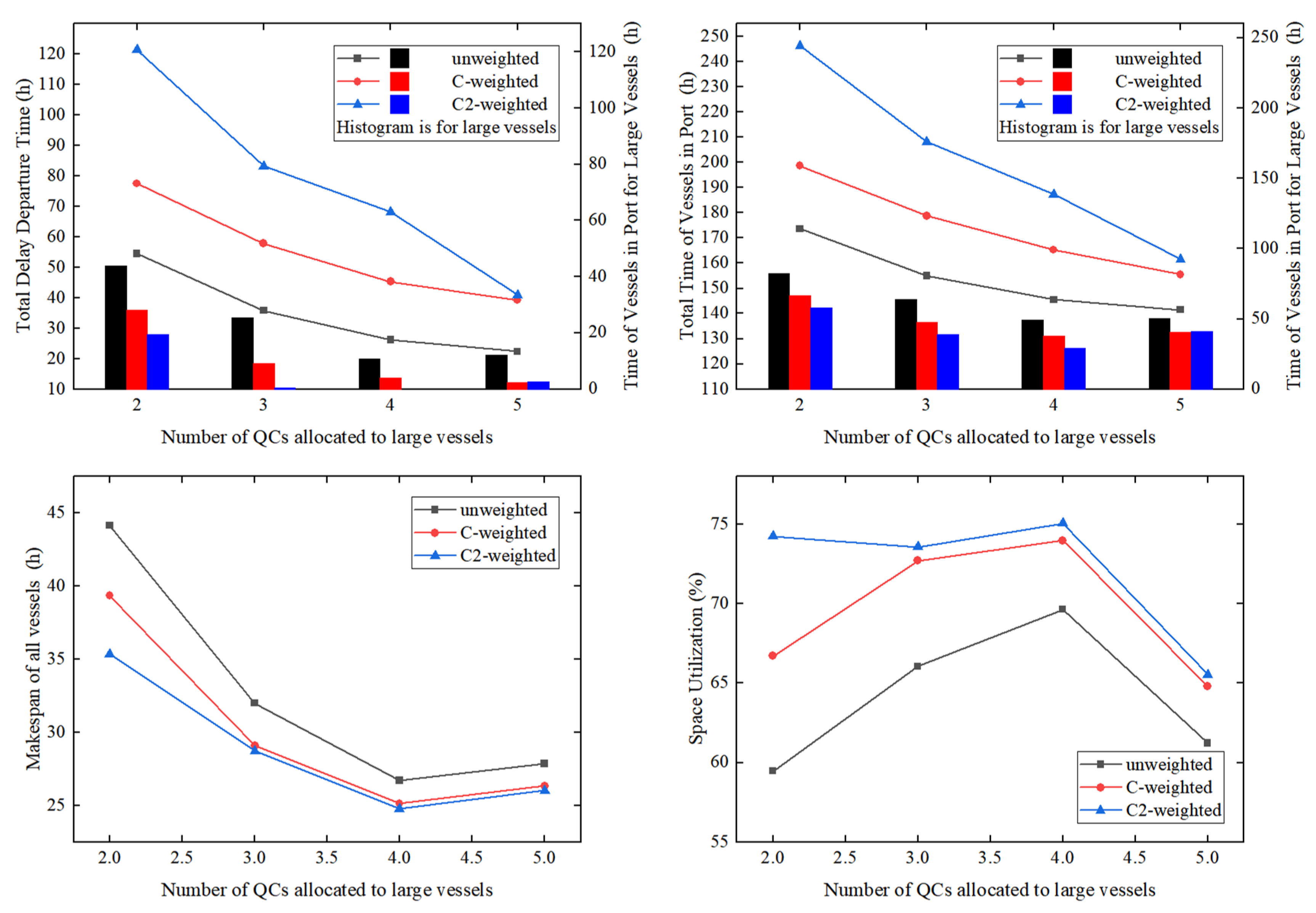
The handling time is determined by the number of quay cranes assigned to a vessel [17]. The influence of the number of quay cranes allocated to large vessels () on the vessel evacuation strategy is analyzed. Considering the lack of quay cranes during congestion, the is set to 2,3,4 and 5. The other ships information is the same as the former experiments. The calculation results are compared in Figure 6.
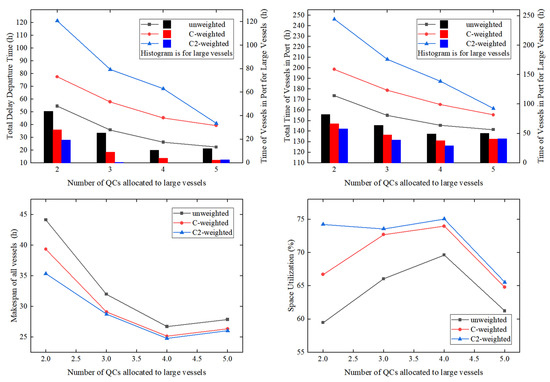
Figure 6.
Scheduling results of different numbers of QCs allocated to large vessels.
The total delay departure time and total time of vessels at port decrease with the increase in under three weighting cases. Regardless of the value of , the total delay departure time and total time of vessels at port weighted by are always greater than those weighted by , and the two values obtained from unweighted scenario are both the smallest. The total delay departure time for large vessels and total time of large vessels at port tend to decrease when varies from two to five, but these two values tend to increase slightly when .
The makespan of all vessels decreases as changing from two to four, but it increases a little when . The makespan in scenario is less than that in scenario, and the value of unweighted case is the largest.
Without considering the arrival of subsequent vessels, the utilization rate of the terminal is represented by the ratio of the rectangles to the area of the total time-location diagram (Figure 5). The utilization rate of the terminal increases with the changes from two to four no matter which weighting scenario, but the values in three scenarios reduce sharply when . The utilization rate of the terminal in unweighted case and weighting case is the lowest and the highest of the three weighting methods, respectively.
6. Conclusions
Port congestion has gradually become an important problem affecting container port operations. In order to better evacuate congested vessels, a method of using service priority to determine the vessel operation sequence was proposed.
In the study, a mixed integer programming model was established to figure out the integrated continuous berth allocation and quay crane assignment problem with the service priority of vessels. The service priority decides the operation sequence of the vessels and is determined by two types of weighting methods. The methods include handling volume weighting and the square of handling volume weighting. Then a genetic algorithm was constructed by minimizing the total weighted delay departure time of vessels at port. The weighted models were compared with unweighted scenario. Lianyungang Port was selected as an example to analyze the method. In order to ensure the generated vessels in the example closer to the actual situation, a linear function relationship between the planned departure time of vessels and the handling volume was obtained based on the actual historical data of vessels arriving at Lianyungang Port. Then another linear relationship between the number of containers to be handled and the ship length was concluded as well.
The calculation results reveal that weighting by the square of handled container volume can shorten the average delay departure time of large vessels. Weighting by was more beneficial to ensure the planned shipping period of large vessels after congestion in Lianyungang Port without seriously affecting the average operation order of small vessels. As for further study on the number of quay cranes used by large vessels, the results show that total delay departure time of vessels and the total time of vessels at port decrease with the increase in . The makespan of all vessels decreases first and then increases as increases. The space utilization rate of the port increases first and then decreases as increases. The research method proposed in this article can reduce total delay and ensure the shipping schedule of large vessels as well. The method provides a new idea for arranging vessel scheduling strategy after congestion situation and can be applied in other container seaports.
It should be noted that some details still need to be studied in future. The upcoming vessels were not considered in the established model, which may affect the scheduling results. Therefore, the subsequent stage of research will focus on the dynamic continuous berth allocation and quay crane assignment problem.
Author Contributions
Conceptualization, S.T. and S.X.; methodology, J.G.; software, S.T.; validation, S.X., M.M. and P.L.; formal analysis, S.T.; investigation, M.M.; resources, S.X.; data curation, S.T.; writing—original draft preparation, S.T.; writing—review and editing, M.M.; visualization, S.T.; supervision, S.X.; project administration, S.X.; funding acquisition, S.T. and S.X. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Transportation Technology and Achievement Transformation Project of Jiangsu Province (No. 2017T29), Postgraduate Research & Practice Innovation Program of Jiangsu Province (No. KYCX20_0139) and Fundamental Research Funds for the Central Universities (No. 3221002116D).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Statistics Bulletin of Transportation Industry Development in 2021. Available online: http://www.gov.cn/shuju/2022-05/25/content_5692174.htm (accessed on 20 July 2022).
- Muren; Meng, W.Y.; Li, G.R.; Hua, L.L. A goal-programming based optimal port docking scheme under COVID-19. Ocean. Coast. Manag. 2022, 225, 11. [Google Scholar] [CrossRef]
- Gui, D.P.; Wang, H.Y.; Yu, M. Risk Assessment of Port Congestion Risk during the COVID-19 Pandemic. J. Mar. Sci. Eng. 2022, 10, 150. [Google Scholar] [CrossRef]
- Christodoulou, A.; Kappelin, H. Determinant factors for the development of maritime supply chains: The case of the Swedish forest industry. Case Stud. Transp. Policy 2020, 8, 711–720. [Google Scholar] [CrossRef]
- Kontovas, C.; Psaraftis, H.N. Reduction of emissions along the maritime intermodal container chain: Operational models and policies. Marit. Policy Manag. 2011, 38, 451–469. [Google Scholar] [CrossRef]
- Winnes, H.; Styhre, L.; Fridell, E. Reducing GHG emissions from ships in port areas. Res. Transp. Bus. Manag. 2015, 17, 73–82. [Google Scholar] [CrossRef]
- Poulsen, R.T.; Sampson, H. A swift turnaround? Abating shipping greenhouse gas emissions via port call optimization. Transp. Res. Part D Transp. Environ. 2020, 86, 102460. [Google Scholar] [CrossRef]
- Christodoulou, A.; Gonzalez-Aregall, M.; Linde, T.; Vierth, I.; Cullinane, K. Targeting the reduction of shipping emissions to air A global review and taxonomy of policies, incentives and measures. Marit. Bus. Rev. 2019, 4, 16–30. [Google Scholar] [CrossRef]
- Poulsen, R.T.; Sampson, H. ‘Swinging on the anchor’: The difficulties in achieving greenhouse gas abatement in shipping via virtual arrival. Transport. Res. Part D Transport. Environ. 2019, 73, 230–244. [Google Scholar] [CrossRef]
- Imai, A.; Nishimura, E.; Hattori, M.; Papadimitriou, S. Berth allocation at indented berths for mega-containerships. Eur. J. Oper. Res. 2007, 179, 579–593. [Google Scholar] [CrossRef]
- Gharehgozli, A.H.; Roy, D.; de Koster, R. Sea container terminals: New technologies and OR models. Marit. Econ. Logist. 2016, 18, 103–140. [Google Scholar] [CrossRef]
- Bierwirth, C.; Meisel, F. A survey of berth allocation and quay crane scheduling problems in container terminals. Eur. J. Oper. Res. 2010, 202, 615–627. [Google Scholar] [CrossRef]
- Iris, Ç.; Pacino, D.; Ropke, S. Improved formulations and an adaptive large neighborhood search heuristic for the integrated berth allocation and quay crane assignment problem. Transp. Res. Part E Logist. Transp. Rev. 2017, 105, 123–147. [Google Scholar] [CrossRef]
- Malekahmadi, A.; Alinaghian, M.; Hejazi, S.R.; Saidipour, M.A.A. Integrated continuous berth allocation and quay crane assignment and scheduling problem with time-dependent physical constraints in container terminals. Comput. Ind. Eng. 2020, 147, 106672. [Google Scholar] [CrossRef]
- Zheng, F.F.; Li, Y.; Chu, F.; Liu, M.; Xu, Y.F. Integrated berth allocation and quay crane assignment with maintenance activities. Int. J. Prod. Res. 2019, 57, 3478–3503. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, J.; Shahbazzade, S. The improved AFSA algorithm for the berth allocation and quay crane assignment problem. Clust. Comput. 2019, 22, 3665–3672. [Google Scholar] [CrossRef]
- Correcher, J.F.; Alvarez-Valdes, R.; Tamarit, J.M. New exact methods for the time-invariant berth allocation and quay crane assignment problem. Eur. J. Oper. Res. 2019, 275, 80–92. [Google Scholar] [CrossRef]
- Tang, M.; Ji, B.; Fang, X.P.; Yu, S.S. Discretization-strategy-based solution for berth allocation and quay crane assignment problem. J. Mar. Sci. Eng. 2022, 10, 495. [Google Scholar] [CrossRef]
- Bierwirth, C.; Meisel, F. A follow-up survey of berth allocation and quay crane scheduling problems in container terminals. Eur. J. Oper. Res. 2015, 244, 675–689. [Google Scholar] [CrossRef]
- Wang, T.S.; Wang, X.C.; Meng, Q. Joint berth allocation and quay crane assignment under different carbon taxation policies. Transp. Res. Part B Methodol. 2018, 117, 18–36. [Google Scholar] [CrossRef]
- Agra, A.; Oliveira, M. MIP approaches for the integrated berth allocation and quay crane assignment and scheduling problem. Eur. J. Oper. Res. 2018, 264, 138–148. [Google Scholar] [CrossRef] [Green Version]
- Türkoğulları, Y.B.; Taskin, Z.C.; Aras, N.; Altınel, K. Optimal berth allocation and time-invariant quay crane assignment in container terminals. Eur. J. Oper. Res. 2014, 235, 88–101. [Google Scholar] [CrossRef]
- Li, F.; Yang, D.; Wang, S.; Weng, J.X. Ship routing and scheduling problem for steel plants cluster alongside the Yangtze River. Transp. Res. Part E Logist. Transp. Rev. 2019, 122, 198–210. [Google Scholar] [CrossRef]
- Lujan, E.; Vergara, E.; Rodriguez-Melquiades, J.; Jiménez-Carrión, M.; Sabino-Escobar, C.; Gutierrez, F. A fuzzy optimization model for the berth allocation problem and quay crane allocation problem (BAP + QCAP) with n quays. J. Mar. Sci. Eng. 2021, 9, 15. [Google Scholar] [CrossRef]
- Shang, X.T.; Cao, J.X.; Ren, J. A robust optimization approach to the integrated berth allocation and quay crane assignment problem. Transp. Res. Part E Logist. Transp. Rev. 2016, 94, 44–65. [Google Scholar] [CrossRef]
- Correcher, J.F.; Alvarez-Valdes, R. A biased random-key genetic algorithm for the time-invariant berth allocation and quay crane assignment problem. Expert Syst. Appl. 2017, 89, 112–128. [Google Scholar] [CrossRef]
- Liu, D.D.; Shi, G.Y.; Kang, Z. Fuzzy scheduling problem of vessels in one-way waterway. J. Mar. Sci. Eng. 2021, 9, 1064. [Google Scholar] [CrossRef]
- Fatemi-Anaraki, S.; Tavakkoli-Moghaddam, R.; Abdolhamidi, D.; Vahedi-Nouri, B. Simultaneous waterway scheduling, berth allocation, and quay crane assignment: A novel matheuristic approach. Int. J. Prod. Res. 2020, 59, 7576–7593. [Google Scholar] [CrossRef]
- Imai, A.; Chen, H.C.; Nishimura, E.; Papadimitriou, S. The simultaneous berth and quay crane allocation problem. Transp. Res. Part E Logist. Transp. Rev. 2008, 44, 900–920. [Google Scholar] [CrossRef]
- Giallombardo, G.; Moccia, L.; Salani, M.; Vacca, I. Modeling and solving the tactical berth allocation problem. Transp. Res. Part B Methodol. 2010, 44, 232–245. [Google Scholar] [CrossRef]
- Lin, S.W.; Ting, C.J. Solving the dynamic berth allocation problem by simulated annealing. Eng. Optim. 2014, 46, 308–327. [Google Scholar] [CrossRef]
- Hsu, H.P. A HPSO for solving dynamic and discrete berth allocation problem and dynamic quay crane assignment problem simultaneously. Swarm Evol. Comput. 2016, 27, 156–168. [Google Scholar] [CrossRef]
- Wang, K.; Zhen, L.; Wang, S.; Laporte, G. Column generation for the integrated berth allocation, quay crane assignment, and yard assignment problem. Transp. Sci. 2018, 52, 812–834. [Google Scholar] [CrossRef]
- Cao, Z.; Wang, W.Y.; Jiang, Y.; Xu, X.L.; Xu, Y.Z.; Guo, Z.J. Joint berth allocation and ship loader scheduling under the rotary loading mode in coal export terminals. Transp. Res. Part B Methodol. 2022, 162, 229–260. [Google Scholar] [CrossRef]
- Jiang, M.X.; Zhou, J.; Feng, J.J.; Zhou, L.; Ma, F.Z.; Wu, G.H. Integrated berth and crane scheduling problem considering crane coverage in multi-terminal tidal ports under uncertainty. J. Mar. Sci. Eng. 2022, 10, 506. [Google Scholar] [CrossRef]
- Cheong, C.Y.; Tan, K.C.; Liu, D.K.; Lin, C.J. Multi-objective and prioritized berth allocation in container ports. Ann. Oper. Res. 2010, 180, 63–103. [Google Scholar] [CrossRef]
- Tang, L.M.; Dai, L.L. Berth allocation with service priority for container terminal of hub port. In Proceedings of the 4th International Conference on Wireless Communications, Networking and Mobile Computing, Dalian, China, 12–14 October 2018; pp. 8490–8493. [Google Scholar]
- Imai, A.; Nishimura, E.; Papadimitriou, S. Berth allocation with service priority. Transp. Res. Part B Methodol. 2003, 37, 437–457. [Google Scholar] [CrossRef]
- Zhang, Y.T.; Zhao, G. Dynamic distribution of berth-quay crane based on ship’s priority. In Proceedings of the 2018 6th International Conference on Machinery, Materials and Computing Technology, Osaka, Japan, 6–8 January 2018; Zuo, M., Ed.; Atlantis Press: Paris, France, 2018; Volume 152, pp. 141–146. [Google Scholar]
- Xu, D.; Li, C.-L.; Leung, J.Y.T. Berth allocation with time-dependent physical limitations on vessels. Eur. J. Oper. Res. 2012, 216, 47–56. [Google Scholar] [CrossRef]
- Stergiopoulos, G.; Valvis, E.; Mitrodimas, D.; Lekkas, D.; Gritzalis, D. Analyzing Congestion Interdependencies of Ports and Container Ship Routes in the Maritime Network Infrastructure. IEEE Access 2018, 6, 63823–63832. [Google Scholar] [CrossRef]
- Xu, B.W.; Li, J.J.; Liu, X.Y.; Yang, Y.S. System Dynamics Analysis for the Governance Measures Against Container Port Congestion. IEEE Access 2021, 9, 13612–13623. [Google Scholar] [CrossRef]
- Dulebenets, M.A. An adaptive island evolutionary algorithm for the berth scheduling problem. Memetic Comput. 2020, 12, 51–72. [Google Scholar] [CrossRef]
- Jia, S.; Li, C.L.; Xu, Z. A simulation optimization method for deep-sea vessel berth planning and feeder arrival scheduling at a container port. Transp. Res. Part B Methodol. 2020, 142, 174–196. [Google Scholar] [CrossRef]
- Song, Y.T.; Wang, N.U. On probability distributions of the time deviation law of container liner ships under interference uncertainty. J. R. Stat. Soc. Ser. A 2021, 184, 354–367. [Google Scholar] [CrossRef]
- Transport, C.W. Lianyungang MSA Makes Every Effort to Ensure the Navigation Safety of Ships. Available online: http://www.zgsyb.com/news.html?aid=373443 (accessed on 20 July 2022).
- Xiang, X.; Liu, C.C.; Miao, L.X. A bi-objective robust model for berth allocation scheduling under uncertainty. Transp. Res. Part E Logist. Transp. Rev. 2017, 106, 294–319. [Google Scholar] [CrossRef]
- Meisel, F.; Bierwirth, C. Heuristics for the integration of crane productivity in the berth allocation problem. Transp. Res. Part E Logist. Transp. Rev. 2009, 45, 196–209. [Google Scholar] [CrossRef]
- Wang, T.S.; Du, Y.Q.; Fang, D.B.; Li, Z.C. Berth allocation and quay crane assignment for the trade-off between service efficiency and operating cost considering carbon emission taxation. Transp. Sci. 2020, 54, 1307–1331. [Google Scholar] [CrossRef]
- Lim, A. The berth planning problem. Oper. Res. Lett. 1998, 22, 105–110. [Google Scholar] [CrossRef]
- Chang, D.F.; Jiang, Z.H.; Yan, W.; He, J.L. Integrating berth allocation and quay crane assignments. Transp. Res. Part E Logist. Transp. Rev. 2010, 46, 975–990. [Google Scholar] [CrossRef]
- Wang, Q.J. Using genetic algorithms to optimise model parameters. Environ. Modell. Softw. 1997, 12, 27–34. [Google Scholar] [CrossRef]
- Ganji, S.R.S.; Babazadeh, A.; Arabshahi, N. Analysis of the continuous berth allocation problem in container ports using a genetic algorithm. J. Mar. Sci. Technol. 2010, 15, 408–416. [Google Scholar] [CrossRef]
- Tan, C.M.; He, J.L. Integrated proactive and reactive strategies for sustainable berth allocation and quay crane assignment under uncertainty. Ann. Oper. Res. 2021, 1–32. [Google Scholar] [CrossRef]
- Yu, J.J.; Tang, G.L.; Song, X.Q. Collaboration of vessel speed optimization with berth allocation and quay crane assignment considering vessel service differentiation. Transp. Res. Part E Logist. Transp. Rev. 2022, 160, 102651. [Google Scholar] [CrossRef]
- Liu, J.; Huang, W.; Shi, X. Damage Diagnosis for Offshore Platform Based on Genetic Algorithm. J. Vib. Meas. Diagn. 2012, 32, 327–331. [Google Scholar]
- Nishimura, E.; Imai, A.; Papadimitriou, S. Berth allocation planning in the public berth system by genetic algorithms. Eur. J. Oper. Res. 2001, 131, 282–292. [Google Scholar] [CrossRef]
- Tao, Z. TSP problem solution based on improved genetic algorithm. In Proceedings of the Icnc 2008: Fourth International Conference on Natural Computation, Jinan, China, 18–20 October 2008; Volume 1, pp. 686–690. [Google Scholar]
- Lazzerini, B.; Marcelloni, F. A genetic algorithm for generating optimal assembly plans. Artif. Intell. Eng. 2000, 14, 319–329. [Google Scholar] [CrossRef]
- Pongcharoen, P.; Hicks, C.; Braiden, P.M. The development of genetic algorithms for the finite capacity scheduling of complex products, with multiple levels of product structure. Eur. J. Oper. Res. 2004, 152, 215–225. [Google Scholar] [CrossRef]
- Yu, T.; Qiang, Z.; Benfei, Z. A genetic algorithm based on spatiotemporal conflict between continuous berth-allocation and time-varying specific crane assignment. Eng. Optim. 2019, 51, 390–411. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).