Figure 1.
Location of Lingshan Island and the measurement area. Insets show the equipment used to collect sea clutter data and ocean parameters.
Figure 1.
Location of Lingshan Island and the measurement area. Insets show the equipment used to collect sea clutter data and ocean parameters.
Figure 2.
Oceanic parameters of the measurement region: significant wave height (SWH), wave direction, wind speed, and wind direction from 8 August to 30 November 2014. The solid blue line represents SWH and wind speed, and the dashed red line represents the wave and wind directions.
Figure 2.
Oceanic parameters of the measurement region: significant wave height (SWH), wave direction, wind speed, and wind direction from 8 August to 30 November 2014. The solid blue line represents SWH and wind speed, and the dashed red line represents the wave and wind directions.
Figure 3.
The distribution of observed data in different SWH and wave directions is shown in polar coordinates.
Figure 3.
The distribution of observed data in different SWH and wave directions is shown in polar coordinates.
Figure 4.
(a) Comparison of measured SWH with predicted SWH. (b). Comparison of measured SWH with measured wind speed.
Figure 4.
(a) Comparison of measured SWH with predicted SWH. (b). Comparison of measured SWH with measured wind speed.
Figure 5.
Workflow of data processing.
Figure 5.
Workflow of data processing.
Figure 6.
Examples of UHF-band sea clutter data at different sea states and range-pulse intensity images. (a) 0.3 m SWH, the 1st sea state, and (b) 2.7 m SWH, the 5th sea state. The color axis scale represents the range of sea clutter intensity; that is, the chromatic values of the color images indicate the intensity of the sea echoes.
Figure 6.
Examples of UHF-band sea clutter data at different sea states and range-pulse intensity images. (a) 0.3 m SWH, the 1st sea state, and (b) 2.7 m SWH, the 5th sea state. The color axis scale represents the range of sea clutter intensity; that is, the chromatic values of the color images indicate the intensity of the sea echoes.
Figure 7.
Range-Doppler images, comparisons of Doppler spectra at different sea states. (a) 0.3 m SWH, the 1st sea state and (b) 2.7 m SWH, the 5th sea state. The color axis scale represents the range of Doppler spectra intensity, spanning from −10 dB to 80 dB.
Figure 7.
Range-Doppler images, comparisons of Doppler spectra at different sea states. (a) 0.3 m SWH, the 1st sea state and (b) 2.7 m SWH, the 5th sea state. The color axis scale represents the range of Doppler spectra intensity, spanning from −10 dB to 80 dB.
Figure 8.
Comparison of mean Doppler spectra of UHF-band sea clutter in the up wave direction at different SWHs.
Figure 8.
Comparison of mean Doppler spectra of UHF-band sea clutter in the up wave direction at different SWHs.
Figure 9.
Comparison of the mean Doppler spectra of UHF-band sea clutter in the cross-wave direction at different SWHs.
Figure 9.
Comparison of the mean Doppler spectra of UHF-band sea clutter in the cross-wave direction at different SWHs.
Figure 10.
Variation of (a) frequency shifts and (b) spectral widths for various grazing angles at different sea states (SS) in the up wave direction. Markers represent mean values of measured data, and lines represent curve fitting (CF).
Figure 10.
Variation of (a) frequency shifts and (b) spectral widths for various grazing angles at different sea states (SS) in the up wave direction. Markers represent mean values of measured data, and lines represent curve fitting (CF).
Figure 11.
Variation of (a) frequency shifts and (b) spectral widths with grazing angles at different sea states in the cross-wave direction. Markers represent mean values of measured data.
Figure 11.
Variation of (a) frequency shifts and (b) spectral widths with grazing angles at different sea states in the cross-wave direction. Markers represent mean values of measured data.
Figure 12.
Spectral frequency shifts at different wave directions, varying with SWH. (a) 60th range bin, corresponding to 6.8° and (b) 100th range bin, corresponding to 4.1°. Markers represent measured data, and lines represent CF. UW represents the up wave direction, and CW 20–40 represents the oblique-cross wave direction with a relative angle of 20–40°; CW 40–60, CW 60–80, and CW 80–90 represent the wave direction of the corresponding relative angle.
Figure 12.
Spectral frequency shifts at different wave directions, varying with SWH. (a) 60th range bin, corresponding to 6.8° and (b) 100th range bin, corresponding to 4.1°. Markers represent measured data, and lines represent CF. UW represents the up wave direction, and CW 20–40 represents the oblique-cross wave direction with a relative angle of 20–40°; CW 40–60, CW 60–80, and CW 80–90 represent the wave direction of the corresponding relative angle.
Figure 13.
Variations of spectral widths at different wave directions vary with SWH. (a) 60th range bin, corresponding to 6.8°. (b) 100th range bin, corresponding to 4.1°. Markers represent measured data.
Figure 13.
Variations of spectral widths at different wave directions vary with SWH. (a) 60th range bin, corresponding to 6.8°. (b) 100th range bin, corresponding to 4.1°. Markers represent measured data.
Figure 14.
Variations of frequency shifts and spectral widths at different wave directions varying with wind speed, at 100th range bin, corresponding to 4.1°. (a) Variations of frequency shifts. (b) Variations of spectral widths.
Figure 14.
Variations of frequency shifts and spectral widths at different wave directions varying with wind speed, at 100th range bin, corresponding to 4.1°. (a) Variations of frequency shifts. (b) Variations of spectral widths.
Figure 15.
Normalized intensity of sea returns in the 80th range bin, corresponding to grazing angle 5.1° in the up wave direction. (a) 0.6 m SWH and (b) 2.7 m SWH.
Figure 15.
Normalized intensity of sea returns in the 80th range bin, corresponding to grazing angle 5.1° in the up wave direction. (a) 0.6 m SWH and (b) 2.7 m SWH.
Figure 16.
Short-time spectra versus time images of sea returns in range bin 80. (a) 0.6 m SWH and (b) 2.7 m SWH. The color axis scale represents the range of Doppler spectra intensity.
Figure 16.
Short-time spectra versus time images of sea returns in range bin 80. (a) 0.6 m SWH and (b) 2.7 m SWH. The color axis scale represents the range of Doppler spectra intensity.
Figure 17.
Mean Doppler spectra of UHF-band sea clutter in the up wave direction at different significant wave heights.
Figure 17.
Mean Doppler spectra of UHF-band sea clutter in the up wave direction at different significant wave heights.
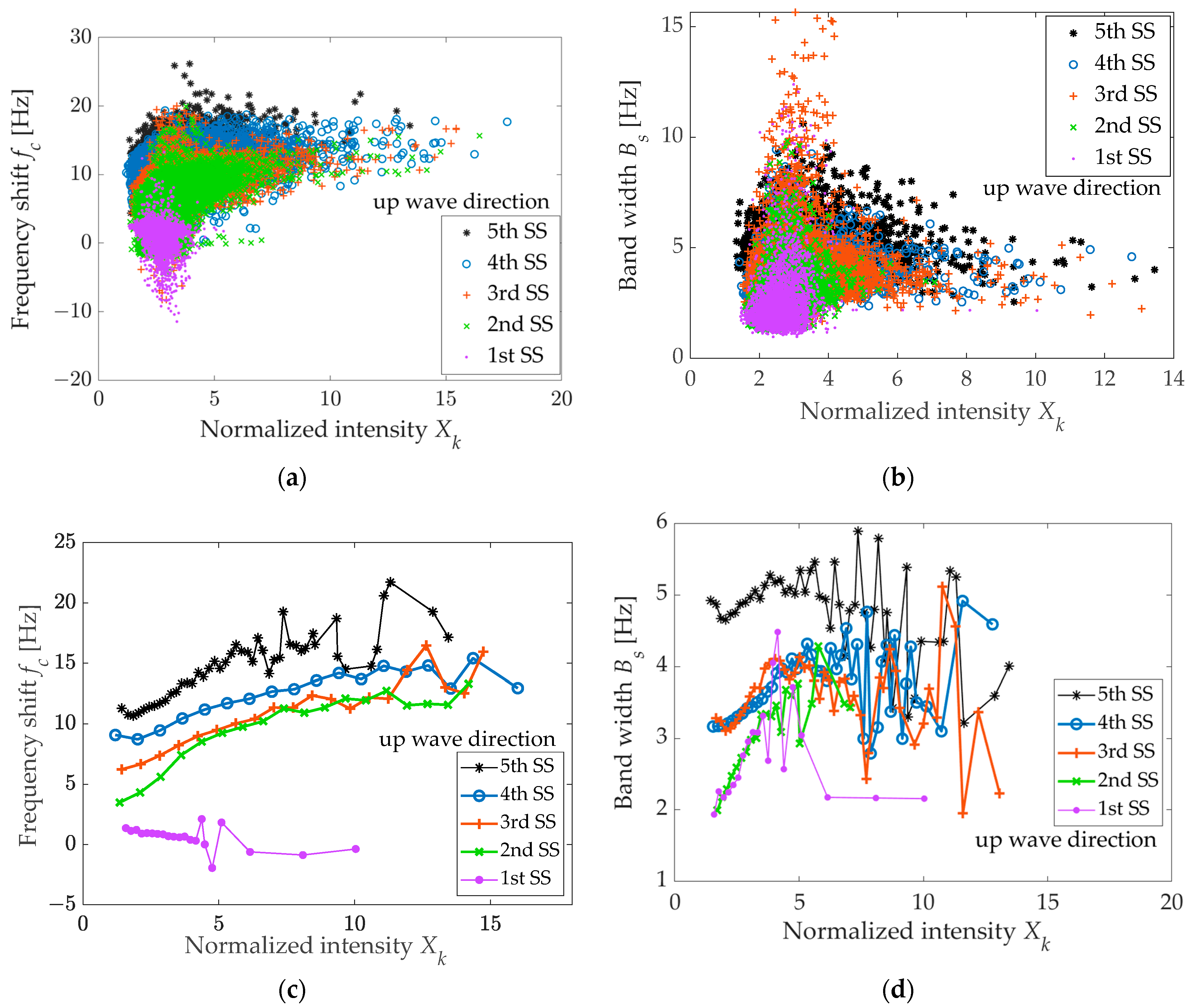
Figure 18.
Frequency shifts and bandwidths of short-time spectra depend on the normalized intensity of sea echoes in the up-wave direction. (a) Frequency shifts of data at different sea states. (b) Spectral widths of data at different sea states. Variation tendencies of (c) frequency shifts and (d) spectral widths.
Figure 18.
Frequency shifts and bandwidths of short-time spectra depend on the normalized intensity of sea echoes in the up-wave direction. (a) Frequency shifts of data at different sea states. (b) Spectral widths of data at different sea states. Variation tendencies of (c) frequency shifts and (d) spectral widths.
Figure 19.
Frequency shift variation tendencies of short-time spectra with a normalized intensity of sea echo at different wave directions. (a) 4th, (b) 3rd, (c) 2nd, and (d) 1st sea states.
Figure 19.
Frequency shift variation tendencies of short-time spectra with a normalized intensity of sea echo at different wave directions. (a) 4th, (b) 3rd, (c) 2nd, and (d) 1st sea states.
Figure 20.
Spectral width variation tendencies of short-time spectra with a normalized intensity of sea echoes at different wave directions. (a) 4th, (b) 3rd, (c) 2nd, and (d) 1st sea states.
Figure 20.
Spectral width variation tendencies of short-time spectra with a normalized intensity of sea echoes at different wave directions. (a) 4th, (b) 3rd, (c) 2nd, and (d) 1st sea states.
Figure 21.
Variation tendencies of coefficients and with grazing angle . Calculated results of (a) coefficient and (b) coefficient . Markers represent calculated results, and lines represent CF.
Figure 21.
Variation tendencies of coefficients and with grazing angle . Calculated results of (a) coefficient and (b) coefficient . Markers represent calculated results, and lines represent CF.
Figure 22.
Model prediction results with data validation example. (a) 4.1° grazing angle in the up wave direction. (b) 5.6° grazing angle in the cross-wave direction with a relative angle of 20–40°. (c) 6.8° grazing angle in the cross-wave direction with a relative angle of 60–80°. Markers represent data, and lines represent model prediction results.
Figure 22.
Model prediction results with data validation example. (a) 4.1° grazing angle in the up wave direction. (b) 5.6° grazing angle in the cross-wave direction with a relative angle of 20–40°. (c) 6.8° grazing angle in the cross-wave direction with a relative angle of 60–80°. Markers represent data, and lines represent model prediction results.
Figure 23.
Variation tendencies of coefficients and with grazing angle . Calculated results of (a) coefficient and (b) coefficient . Markers represent calculated results, and lines represent CF.
Figure 23.
Variation tendencies of coefficients and with grazing angle . Calculated results of (a) coefficient and (b) coefficient . Markers represent calculated results, and lines represent CF.
Figure 24.
Model prediction results with data validation example. (a) 0.7, (b) 0.9, and (c) 1.2 m SWH. Markers represent data, and lines represent model prediction results.
Figure 24.
Model prediction results with data validation example. (a) 0.7, (b) 0.9, and (c) 1.2 m SWH. Markers represent data, and lines represent model prediction results.
Figure 25.
Variation tendencies of frequency shift with normalized intensity in a mixed wave direction.
Figure 25.
Variation tendencies of frequency shift with normalized intensity in a mixed wave direction.
Figure 26.
Variation tendencies of frequency shift with normalized intensity in a mixed wave direction. Markers represent data, and lines represent model prediction results.
Figure 26.
Variation tendencies of frequency shift with normalized intensity in a mixed wave direction. Markers represent data, and lines represent model prediction results.
Table 1.
Radar parameters during measurement.
Table 1.
Radar parameters during measurement.
| Parameter | Value |
|---|
| Polarization | HH |
| PRF | 1000 Hz |
| Frequency | 456 MHz |
| Elevation angle | −4° |
| Pulse width | 10 us (0.4 us compressed) |
| Resolution | 60 m |
| Height | 430 m |
| Grazing angles | 2° to 8° |
Table 2.
Oceanic parameters and definitions of relative wave or wind directions.
Table 2.
Oceanic parameters and definitions of relative wave or wind directions.
| Oceanic Parameters | Value |
|---|
| Wind speed (m/s) | 0.1–15 |
| SWH (m) | 0.1–3.0 |
| Wave/wind direction (°) | up wave/up wind () |
| cross wave/cross wind ( and ) |
down wave/downwind ()
oblique-cross wave/wind (other values of ) |
Table 3.
Sea clutter datasets at each sea state in the Douglas standard.
Table 3.
Sea clutter datasets at each sea state in the Douglas standard.
| Condition of Sea Surface | Parameters | Number of Datasets |
|---|
| Sea state | 1st | 1911 |
| 2nd | 5654 |
| 3rd | 1986 |
| 4th | 160 |
| 5th | 11 |
| Wave direction | up wave | 2252 |
| down wave | 73 |
| cross wave | 1044 |
| oblique-cross wave | 6353 |
Table 4.
Statistical occurrence probability of bimodal phenomenon.
Table 4.
Statistical occurrence probability of bimodal phenomenon.
| Sea States | Probability of Bimodal Spectra (%) | (dB) | (dB) | (Hz) | (Hz) | (Hz) |
|---|
| 1st sea state | Up wave | 22.68 | 43.43 | 37.28 | 0.98 | −1.95 | 5.49 |
| Oblique-cross wave | 30.58 | 44.13 | 37.29 | −0.98 | 0.98 | 4.97 |
| Cross wave | 27.08 | 44.78 | 36.00 | 1.91 | 0.10 | 5.20 |
| 2nd sea state | Up wave | 20.52 | 46.28 | 37.98 | 2.64 | 0.00 | 6.97 |
| Oblique-cross wave | 21.11 | 46.19 | 36.86 | 0.72 | 1.14 | 5.96 |
| Cross wave | 22.28 | 46.91 | 35.29 | −1.95 | 0.00 | 6.32 |
| 3rd sea state | Up wave | 7.95 | 48.32 | 38.02 | 5.41 | 11.72 | 8.12 |
| Oblique-cross wave | 4.78 | 47.98 | 45.11 | 2.31 | 3.29 | 6.25 |
| Cross wave | 4.36 | 47.64 | 41.27 | −1.56 | 1.17 | 5.14 |
| 4th sea state | Up wave | 2.35 | 55.13 | 44.20 | 11.21 | 18.69 | 9.77 |
| Oblique-cross wave | 1.10 | 47.48 | 40.61 | 6.18 | 15.95 | 9.94 |
| 5th sea state | Up wave | 0.74 | 63.56 | 52.29 | 12.83 | 22.42 | 11.87 |
Table 5.
Fitting curve formula coefficients for frequency shifts and spectral widths with grazing angles.
Table 5.
Fitting curve formula coefficients for frequency shifts and spectral widths with grazing angles.
| Sea States | Fitting Curve Formula |
|---|
| |
|---|
| a | b | c | d |
|---|
| Up wave direction | 1st | −0.11 | 1.19 | −0.65 | 6.23 |
| 2nd | −0.21 | 2.59 | −0.39 | 4.93 |
| 3rd | −0.50 | 7.73 | −0.27 | 4.81 |
| 4th | −0.81 | 13.79 | −0.14 | 4.18 |
| 5th | −1.16 | 18.50 | −0.004 | 5.20 |
Table 6.
Fitting curve formula coefficients for frequency shifts and spectral widths with SWHs.
Table 6.
Fitting curve formula coefficients for frequency shifts and spectral widths with SWHs.
| (°) | (°) | Fitting Curve Formula |
|---|
| |
|---|
| | | |
|---|
| 60th range bin, 6.8° | Up wave | 5.57 | −1.89 | 1.36 | 1.42 |
| Cross wave (20–40°) | 4.37 | −1.47 | 1.36 | 1.42 |
| Cross wave (40–60°) | 3.89 | −1.23 | 1.36 | 1.42 |
| Cross wave (60–80°) | 2.52 | −1.87 | 0.84 | 1.41 |
| Cross wave (80–90°) | 0 | 0 | 0.84 | 1.41 |
| 100th range bin, 4.1° | Up wave | 7.51 | −2.48 | 0.84 | 2.75 |
| Cross wave (20–40°) | 6.80 | −2.73 | 0.76 | 2.62 |
| Cross wave (40–60°) | 5.91 | −1.78 | 0.58 | 2.66 |
| Cross wave (60–80°) | 4.97 | −3.62 | 0.28 | 3.29 |
| Cross wave (80–90°) | 0 | 0 | 0.19 | 2.84 |
Table 7.
Fitting curve formula coefficients for frequency shifts and spectral widths with wind speed.
Table 7.
Fitting curve formula coefficients for frequency shifts and spectral widths with wind speed.
| (°) | (°) | Fitting Curve Formula |
|---|
| |
|---|
| | | |
|---|
| 100th range bin, 4.1° | up wave | 1.16 | −0.44 | 0.055 | 3.39 |
| oblique-cross wave | 0.42 | −0.71 | 0.036 | 3.11 |
| cross wave | −0.24 | −2.03 | −0.18 | 3.93 |
| down wave | −3.58 | 2.02 | 0.014 | 3.02 |





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}