1. Introduction
With the advent of the Fourth Industrial Revolution, shipping ports and various industries related to goods have undergone significant transformations. This is a time when autonomous ships are becoming increasingly prominent, benefiting from efficient operations facilitated by the internet of things (IoT) and artificial intelligence (AI). Thus, the new port logistics sector is experiencing rapid advancements in digitalization and smartization. These developments extend not only within the port itself, but also encompass external connections [
1].
Among these advancements, smart ports are characterized as ports that optimize port operations, enhance cargo flow, and improve safety and security. This is achieved through the collection and analysis of data obtained from ships and port infrastructure, enabling the efficient handling of large volumes of cargo [
2]. Countries worldwide are actively applying advanced technologies and engaging in research and development to establish smart port locations. Although smart ports are being established in Korea, such as Busan Port and Gwangyang Port, there is a lag in port technology compared with overseas operations. This is primarily due to the challenges in securing unmanned technology, including automatic transportation capabilities and remote-control methods [
3]. Consequently, the Korean government is actively responding to the new paradigm of autonomous operations and unmanned ships, aiming to become a global leader in smart ports [
4].
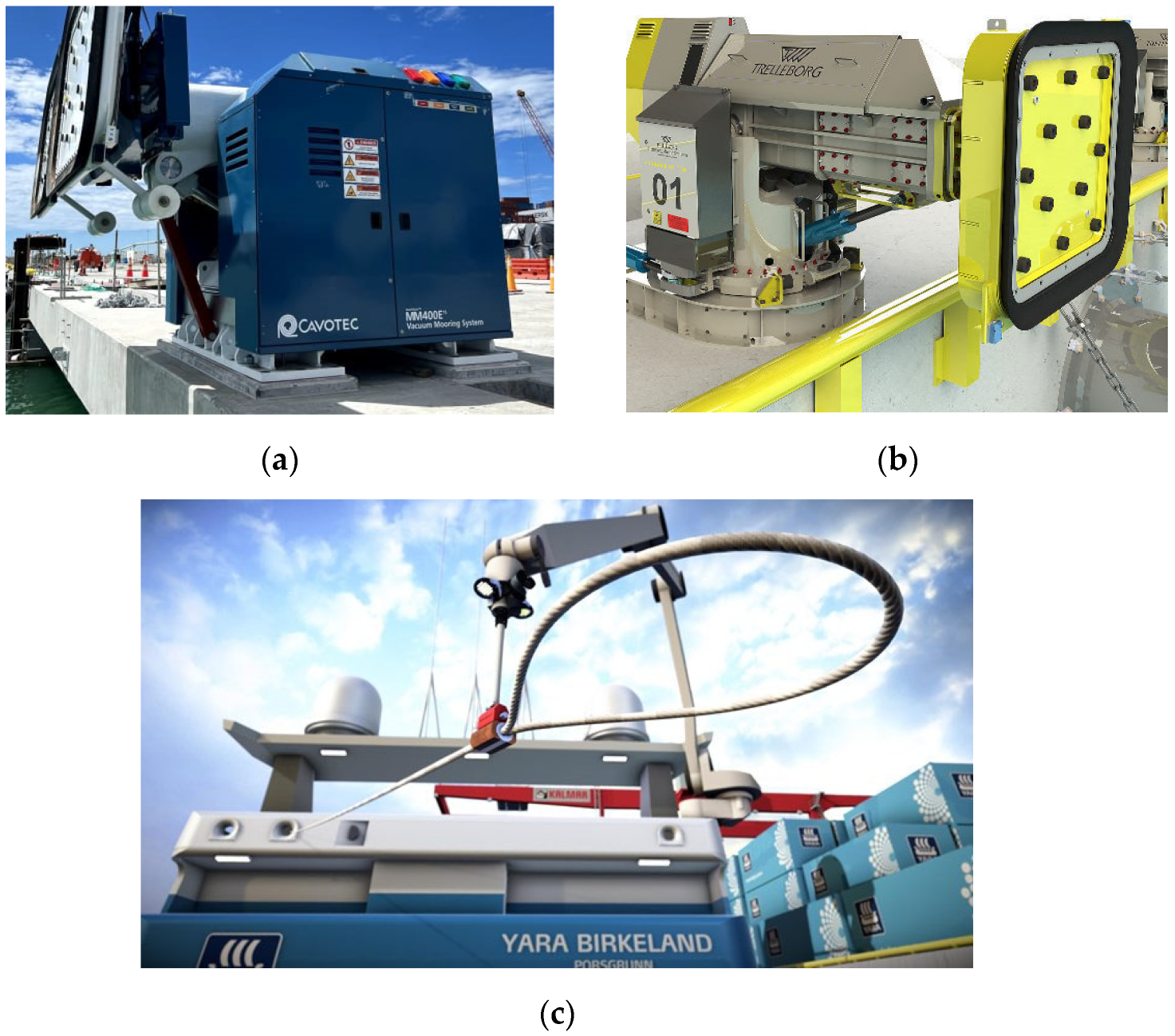
Figure 1 illustrates the various types of automatic mooring devices. Companies such as Trelleborg in Sweden and CAVOTEC in Switzerland have commercialized automatic mooring devices, such as vacuum and magnetic mooring, which are installed on port walls. These companies actively engage in continuous research and development in this field. In cases where a port does not have an installed automatic mooring system, a wiring system, such as wiring mooring, must be established to utilize the existing infrastructure for mooring ships. One successful implementation of the wiring system was seen in the Yara Birkeland project, which utilizes a 7-degree-of-freedom (DOF) robot arm system.
Automatic mooring devices typically employ two main mooring methods: vacuum and magnetic methods. The vacuum method uses a suction pad that operates by reducing the pressure inside the pad. The vacuum suction pad controls the movement of the ship during mooring by creating a pressure difference with the external environment. In contrast, the magnetic method involves a suction pad equipped with a magnet that allows quick detachment. However, notably, mooring with a magnet has the potential to damage the hull of a ship. In terms of configuration, mooring systems can be categorized into single- and double-pad configurations, depending on the number of suction pads installed. These configurations determine the number of points of contact between the ship and mooring system during docking.
Traditional manual mooring can be time-consuming and labor-intensive, often requiring a significant number of crew members to secure a ship in place. In contrast, an automatic mooring system streamlines this procedure by utilizing advanced technology and mechanisms that enable rapid and precise mooring without the need for extensive manual labor. Moreover, safety is a paramount advantage of the automatic mooring system. Manual mooring activities pose inherent risks to crew members, who may be exposed to hazardous conditions such as heavy equipment, unpredictable weather, and moving ships. With the automatic mooring system, these risks are substantially reduced as personnel involvement during mooring is minimized, thereby creating a safer working environment. Financial considerations also underscore the advantages of the automatic mooring system. While initial installation costs may be higher compared to traditional methods, the long-term cost savings are significant. The reduction in labor requirements and the prevention of accidents and ship damage contribute to lower operational expenses and potential insurance premiums. Additionally, the system’s efficiency can lead to faster ship turnaround times, optimizing port capacity and generating potential revenue gains [
5].
The design of a suction pad for an automatic mooring device incorporates various factors, including the mooring force exerted by the target ship (specifically, sway and surge forces), material composition, and shape of the rubber seal [
6]. The size of the suction pad is calculated based on the magnitude of the mooring force exerted on the target ship. This estimation considers different loads, such as wind, current, and wave forces, under specific environmental conditions. Empirical and numerical analytical methods are typically used for this estimation. The selection of the rubber seal material is crucial for withstanding the forces exerted by the ship, considering factors such as heat resistance, pressure resistance, and weather resistance. The objective is to minimize the potential damage and corrosion of the ship’s hull. The shape of the lip and the contact angle of the rubber seal are essential design variables because they directly interact with the hull of the ship. The design process focuses on optimizing these aspects to achieve efficient performance by determining the most suitable lip shape and contact angle.
Significant prior research has been conducted on the development of safe and efficient ship mooring methods and automatic mooring systems. In Korea, efforts have been made to develop automatic systems for ship-to-ship docking [
7]. Empirical studies have also been conducted to design a sliding mode control system for automatic mooring between ships and ports [
8]. Seo and Oh [
9] conducted research to estimate the mooring force applied to the training ship HANBADA, adhering to the design standards for ports and fishing ports. In a separate study, Son et al. [
10] investigated and analyzed the changes in the mechanical properties of materials suitable for rubber seals used in vacuum-type automatic mooring systems in response to temperature fluctuations. In international studies, an innovative design has been proposed to replace the traditional single-rope mode with a dual-rope parallel mode that maintains high tensile strength and low effective spring constants in the ropes. This design has been verified to reduce momentary tension and increase the safety factor of the ropes [
11]. Additionally, a research and development effort has been focused on an intelligent mooring system based on ship hydrodynamics, mechanism kinetics, and intelligent algorithms, yielding effective suppression of mooring line movements under various operational conditions [
12]. In previous studies, novel mooring methods have been proposed from a stability perspective. Additionally, research has been conducted on ship motion control, estimation of mooring forces for suction, and the selection and design of rubber seal materials to prevent system damage for the development of automatic mooring devices. However, there has been a lack of research on the performance testing of the suction pads applied in the automatic mooring system.
This study investigated the design requirements for future smart port construction in Korea and assessed the performance of automatic mooring systems through real-scale testing. To determine the target suction force for the automatic mooring device, the longitudinal (Fx) and transverse (Fy) mooring forces were estimated based on established design standards for ports and fishing ports. The suction method (vacuum or magnetic) and pad type (single pad or double pad) were selected considering the prevailing environmental conditions and port infrastructure. The suction pad utilizes a thermoplastic elastomer rubber seal known for its outstanding properties, including ozone resistance, weather resistance, flame retardancy, and strong adhesion to metals and plastics. Natural rubber (NR) with a high tensile strength and excellent mechanical properties was chosen as the material for the rubber seal. The design of the rubber seal focused on maximizing the contact area between the hull and pad while preventing the rubber from drying, with special attention paid to the lip area and contact angle. For the real-scale test, equipment was developed to evaluate the performance of the automatic mooring device. The experimental results were compared with the theoretically calculated suction forces, and the displacement of the rubber suction pad was measured under the maximum mooring force. Moreover, the ability of the ship to withstand the maximum mooring force in the surge and sway directions under various environmental conditions was assessed to ensure an accurate reflection of real-world scenarios.
In this study, the design and performance testing of vacuum suction pads for the development of an automatic mooring system could hold significant implications for various future research domains. It could aid in securing the feasibility of LiDAR visual sensor system development for assessing ship docking conditions [
13]. By utilizing the vacuum change and displacement data obtained in this study, we can develop the capacity to proactively detect situations such as improper object adhesion or slipping during movement, thus preventing accidents during operations. Consequently, it introduces novel suggestions to address the challenge of when harbor workers and passengers should evacuate or abandon the ship [
14]. Additionally, leveraging the mentioned data, the PID controller can proficiently regulate the force of hydraulic actuators, thereby contributing to effectively managing ship motion within desired ranges, not only under environmental disturbances but also in other scenarios [
15]. This way, the study contributes to enhancing maritime technology and its applications.
In this way, this study presents a significant approach to advancing maritime technology, despite certain limitations and assumptions. It accomplishes this by introducing an innovative vacuum suction pad design and a comprehensive performance testing methodology, thereby offering a crucial avenue for the advancement of oceanic technology. Moreover, it models the future of automatic mooring systems and their integration into smart port environments.
2. HANBADA Ship’s Mooring Force Estimation
2.1. Target Ship
Figure 2 depicts the mooring process of HANBADA, which is a training ship measuring 104 m in length overall (LOA). It falls under the 6600-ton ship category and is specifically designed to accommodate future demonstrations. Additional information regarding the ship is provided in
Table 1.
2.2. Estimation of the Mooring Force on the HANBADA Ship
When designing a mooring system for a ship, it is crucial to consider the various loads that the ship encounters while docking at port. These loads include the wind force, fluid force from the current, and fluid force from waves. In this study, the port selected for analysis was the pier at the Korea Maritime and Ocean University. The port has a depth of approximately 6–7 m, and the tide in the vicinity is influenced by illumination, resulting in a dampened effect compared with the main tide in the port. The tide flows toward the inner port through the illuminated area [
17]. As shown in
Figure 3, the ship “HANBADA” is moored at the pier of Korea Maritime and Ocean University. The direction of the mooring force was determined by calculating the loads acting on the ship in the most significant longitudinal direction (
Fx) and lateral direction (
Fy) based on the ship’s central axis.
2.3. Estimation of the Mooring Force Due to Wind
The wind force acting on a moored ship is determined by considering the forces in the
Fx and
Fy directions, which account for the variations in the wind speed and the hull cross-sectional shape. The wind force in the
Fx direction primarily affected the frontal projection area of the upper part of the water surface, resulting in a relatively smaller force. Conversely, wind from the
Fy direction acts on the transverse projection area of the upper part of the water surface, leading to a significantly larger force. Typically, wind force is calculated assuming a specific wind speed distribution, such as an exponential distribution, based on sea wind characteristics in the port area. However, in this study, a conservative approach was adopted by assuming a uniform flow. Considering the sea area of the port and the avoidance of wind speeds up to beafort 7, the maximum wind speed for the port was set to 14 m/s, corresponding to beafort 6. Ideally, the wind pressure coefficients (
Cx,
Cx,
Cy and
CM) should be obtained through wind tunnel experiments or water tank tests specific to the ship under consideration. However, these experiments are time-consuming and expensive. Therefore, in this study, the wind pressure coefficient was calculated using computational fluid dynamics (CFD) values derived by Sea and Oh [
9], and Equations (1)–(3) from the port and fishing port design standards provided by the Ministry of Ocean and Fisheries [
18] were employed.
Cx: x-direction wind drag coefficient.
Cy: y-direction wind drag coefficient.
CM: Wind pressure moment coefficient at the ship center.
Rx: Sum of x-direction component of wind force (kN).
Ry: Sum of y-direction component of wind force (kN).
RM: Moment of rotation of the ship’s central axis of the combined wind force (kN·m).
: Density of air (kg/m3).
Ar: Transverse projected area (m2).
AL: Lateral projected area (m2).
LPP: Length between perpendiculars.
2.4. Estimation of the Mooring Force Due to Current
The fluid force generated by the current can be divided into friction and pressure resistance components. The friction resistance is more significant in the flow direction, whereas the pressure resistance is dominant in the lateral flow direction. However, accurately separating the friction resistance from the pressure resistance is challenging because of their interconnected nature. In the case of the Korea Maritime and Ocean University Port, located near the entrance of Busan Port, the current speed was determined to be 0.5 knots with a direction of 030°. The fluid pressure resulting from the current can be calculated using Equation (4), provided by the Ministry of Oceans and Fisheries [
18].
: Fluid pressure (kN).
: The specific gravity of sea water (≒1.03 ton/m3).
: Gravitational acceleration.
: Temperature (°C) (≒15 °C).
: Submerged surface area (m2).
: Flow rate (m/s).
: Coefficient (≒0.14).
2.5. Estimation of the Mooring Force Due to Waves
The calculation of the wave force acting on a moored ship requires an appropriate method that considers the shape of the ship and wave specifications based on port and fishing port design standards. An accurate calculation of the wave force can be performed through model tests, CFD, and kinematic analyses. However, in this study, the wavelength of the sea area was relatively large (0.5 m); therefore, the strip method was used for the calculation. The wavelength of the port, on the other hand, was not significant at 0.5 m, and was therefore disregarded in this study [
9].
2.6. Total Mooring Force of the HANBADA Ship
Table 2 presents the forces that can occur when the 6400-ton HANBADA moors at the pier of the Korea Maritime and Ocean University under specific environmental conditions. The wind speed is 14 m/s, the current flows at 0.5 knots, and there are waves with a height of 0.5 m and a period of 8.3 s. The projection area was relatively small in the longitudinal direction of the ship and the effect of the current was insignificant, resulting in a force of approximately 17.7 kN. However, in the lateral direction, a substantial force of 248 kN was generated because of the larger lateral projection area caused by the superstructure of the ship.
Furthermore, based on the installation case of CAVOTEC, if a specific technology is not applied, most installations have a capacity of less than 400 kN (200 kN for 1, 200 kN for 2, and 400 kN for 1) based on the sway. To calculate the target suction force, least-squares curve fitting was employed using the CAVOTEC’s ship length specification data to derive the expected mooring force for the ship being tested in comparison with the LOA. A comparative verification was performed using the values calculated from the empirical formula. When comparing all ship types, considering data from a relatively challenging environment (port without a breakwater), an excessive suction force may be calculated, and application specifications can vary depending on the ship type. Therefore, it was deemed appropriate to use data that compared only the Ferry and Ro-Ro lines, which are similar in length to HANBADA. The estimated expected mooring force is shown in
Figure 4.
The expected performance may vary depending on the order of the selected curves. However, for the data selected based on the Ferry and Ro-Ro lengths, a mooring force of approximately 600 kN was required. In addition, the lateral (sway) force under extreme oceanic conditions (Beaufort 6) was estimated to have a maximum mooring force of 248 kN. Therefore, the target suction force was calculated as the maximum mooring force of approximately 200 kN per suction pad, and it is expected that two to three automatic mooring devices will be required to moor the training ship HANBADA. Furthermore, upon reviewing the data from all ships, it is evident that the mooring forces exceed 900 kN. Given the approximately 46% difference between the Ferry and Ro-Ro data, it becomes essential to consider the feasibility of suction for large ships when applying the automatic mooring system.
6. Conclusions
In this study, the design elements required for a vacuum suction pad applied to an automatic mooring device in preparation for the construction of a smart port in Korea were identified. Rubber materials were selected, and rubber seals were designed and manufactured. A real-scale performance test was conducted to evaluate the vacuum ratio and displacement values and assess the pad’s ability to withstand the maximum mooring force.
The maximum mooring force of the HANBADA training ship at the Korea Maritime and Ocean University was calculated based on empirical formulas. In the sway direction, which is the longitudinal direction of the ship, a force of approximately 17.7 kN was estimated owing to the smaller projection area and weaker tides. However, in the surge direction, a mooring force of 248 kN was estimated, owing to the larger lateral projection area caused by the superstructure of the ship. Based on the least-squares curve, fitting was applied to the CAVOTEC’s ship length specification data, and a mooring force of approximately 600 kN was determined for the Ferry and Ro-Ro ships. Considering these factors, it was concluded that a maximum suction force of 200 kN per unit and a double-pad type would ensure stable mooring. The specifications of the vacuum suction pad were modified to increase the dimensions by 60 mm compared to the COVOTEC pad specifications. This maximized the suction area of the hull and pad, resulting in an increased suction force of 181.6 kN, which was approximately 2.6% higher than that of the previous model. The selection and design of rubber seal materials involved the addition of NR with excellent mechanical properties and a small amount of CR material for ozone resistance to prevent performance degradation.
The real-scale performance tests included leakage, sway, and water spray tests in the surge direction. The leakage test confirmed that no air leakage occurred and that the vacuum pressure remained constant. In the sway test, vacuum was maintained even under a maximum load of 200 kN under dry conditions with a vacuum pressure of −80 kPa. Under the water spray condition, the vacuum ratio increased slightly to 1.03; however, the suction force was maintained. In the surge direction, under both dry and water spray conditions, the vacuum ratio decreased to 0.99, indicating slight air leakage in the pad owing to ground friction.
Displacement measurements were conducted using a laser sensor to observe the changes in the shape of the rubber seal when a load was applied and subsequently removed. In the sway state, there was a difference of 1–3 mm compared with the average displacement, whereas the water spray condition showed a more uniform displacement, measuring 3 mm less than the average displacement under dry conditions. In the surge state, the displacement reached 20 mm under dry conditions and 50 mm under water spray conditions; however, no drying or damage to the rubber seal was observed.
In future studies, furthermore, this paper estimated mooring forces based on a 6400-ton HANBADA ship. However, there are plans to expand the research by selecting various types of ships, such as large container ships (KCS), tanker ships (KVLCC2), and cargo ships (JBC). These plans also include calculating mooring forces considering different harbor environmental conditions and conducting suction performance tests.
The suction performance test is planned to be conducted under conditions where welding lines and anti-fouling coatings are applied, simulating the hull environment. This test will consider the suction situation in areas of the hull with curvature, as well as on inclined surfaces, where the bottom surface is slanted, and further tests will be performed to determine the required range of vacuum pressure and load considering the water spray conditions and elastic recovery of the rubber.


 ,
, 

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}