
Coastal Marine Monitoring Experiments at the National Research Council in Messina, Italy: 30 Years of Research



Abstract
:1. Introduction
2. The History and Technological Evolution of the Prototypal Monitoring Systems Built in Messina
2.1. Step 1: First Experiments
2.2. Step 2: Starting Instrumentation Development
- The Ministry for Communication had to grant a license for the exploitation of the radio frequency;
- A site, high enough on the sea and without obstacles in the direction of the buoy station, was needed to host a Land Base Station;
- The antennas had to be in reciprocal view;
- The marine aerosol caused the attenuation of the signal;
- The use of directional antennas with a good gain sometimes became necessary to lower the transmission power, but this solution was not always applicable to buoy systems, because of the small size of the buoy, and of the buoy’s movement caused by currents or wind;
- The antennas height determined the maximum reachable distance;
- Further limitations could be imposed through municipal laws;
- The possible reception of background noise viaantennas pointed too low on the sea horizon had to be considered.
2.3. Step 3: Definition of the Final Architecture
2.3.1. Design of a New Platform
2.3.2. System Hardware
2.3.3. System Software
2.4. Newer Developments
- Battery recharging systems (solar panels or wind generators) had to be available on the buoy;
- Equipment could not draw too much energy from the supply system;
- Modularity and flexibility had to always be pursued;
- Communication link had to be reliable;
- Maintenance had to be easily performed in situ;
- Costs had to be minimized.
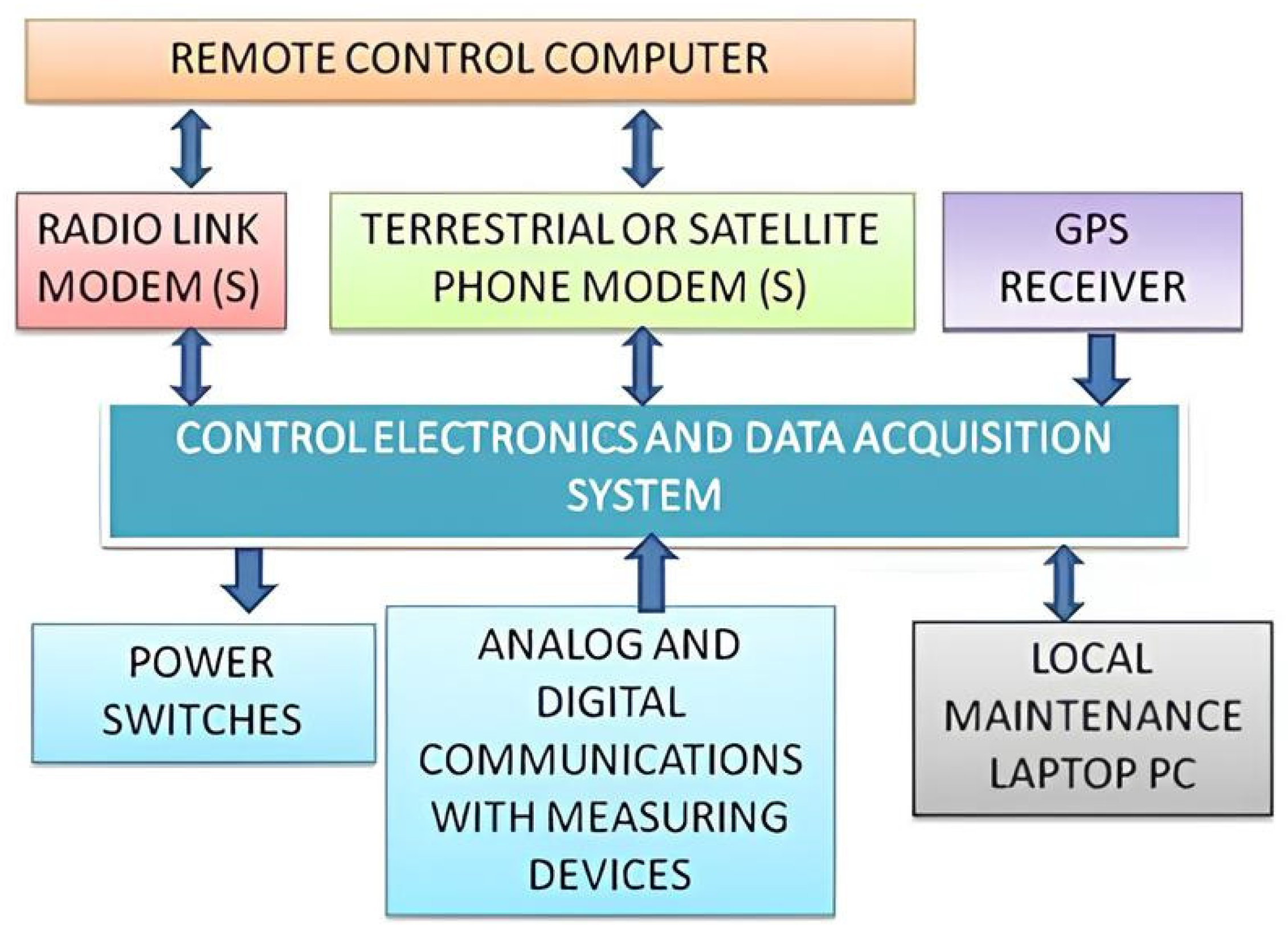
- A computer of any kind (software was however written for PC-like ones) could be used to control the sea station, allowing the storage of the collected measurements in a database (remote or local).
- Sea station:
- Power supply system managing the power sources (batteries and local generators);
- Measuring system for connecting the installed sensors and devicesvia standard interfaces (typically serial RS232);
- Data acquisition system for coordinating all measuring and management operations;
- A GPS system to monitor the position of the system to send an alarm in case of un-mooring;
- A data transmission system that could be a VHF/UHF link, a terrestrial or satellite mobile telephony modem or, in later years, a LoRa interface.
2.4.1. The Power Supply System
2.4.2. The Measuring System
2.4.3. The Data Acquisition, Communication and Treatment
2.5. Special Equipments: Water Samplers
3. Discussion
3.1. The Technological Progress Made over the Years
3.2. Challenges and Solutions
- (1)
- Power supply: The first buoys were too small to host a recharging system (solar panels or wind generators) or more powerful batteries, but electronic devices needed good, stable and reliable availability of power. Switching off unnecessary devices and putting them into a suspended “sleep” state the acquisition subsystem were the first energy-saving procedures that were implemented. A more accurate design of the power supply subsystem, with the use of “low voltage drop” devices and a new step-up/step-down-high efficiency DC/DC converter, also enabled us to supply the instrumentation with the proper voltage when battery charge was about to end (e.g., for a delayed battery substitution caused by meteo-marine conditions). The use of solar panel on larger buoys and platforms made a big contribution to avoiding battery dis-charged events, but in the case of prolonged bad weather conditions or soiling of the panels, the produced energy could be very low (during the experiments, one of the buoys, moored near Milazzo, was found totally covered with volcanic ash coming from an eruption of the Etna volcano several tens of kilometers away). The addition of wind generators solved any problems.
- (2)
- Communication faults: This kind of problem was quite “normal” when first using systems with private radio links; it was typically caused by the bad coupling of the radio equipment, radio-electric interferences or the obstruction of the “visibility” between the antennas (e.g., caused by large ships passing or anchored near the buoy). To avoid battery discharging, it was necessary to limit the number of transmission retries to three. A low battery condition, with are duction in the transmission power, could also generate communication faults. The use of mobile networks almost solved these communication problems, or at least transferred them to the telecom provider.
- (3)
- System freezing: It was necessary to avoid the acquisition system waiting indefinitely for a reply from a device (that could be out of order). Adding a watchdog timer (hardware in the first systems, software in the latest) to periodically reset all devices solved the problem.
- (4)
- Sensor drift: periodical calibration at the manufacturer was necessary, but to ensure the best possible quality of the acquired data, reference measurements were performed in tandem with periodical maintenance operations (mooring control, fouling removal)
- (5)
- Duties and taxes: A study was conducted on the correct behavior. Comparing Navigation Code, DPR 633/72 (VAT Code) and the pronouncements and opinions of tax offices, the right fiscal regime was individuated, which equated coastal monitoring platforms and equipped small boats to ordinary ships for commercial use, making them subject to a special fiscal regime.
- (6)
- Last but not least (or maybe the most important), the lack of funding: all the described equipment were built using “spot” funding, usually lasting no more than three years; financial reporting rules obliged us to spend all the money before the end of the research program, without saving any amount for subsequent maintenance, which was supposed to be funded by other sources (research programs, external contracts and contributions) that, when found, were very scarce.
3.3. Comparative Analysis
4. Conclusions
5. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bonamano, S.; Piermattei, V.; Madonia, A.; Paladini de Mendoza, F.; Pierattini, A.; Martellucci, R.; Stefanì, C.; Zappalà, G.; Caruso, G.; Marcelli, M. The Civitavecchia Coastal Environment Monitoring System (C-CEMS): A new tool to analyze the conflicts between coastal pressures and sensitivity areas. Ocean Sci. 2016, 12, 87–100. [Google Scholar] [CrossRef]
- Griffiths, G.; Davis, R.; Eriksen, C.; Frye, D.; Marchand, P.; Dickey, T. Towards New Platform Technology for Sustained Observations. In Proceedings of the Ocean Obs99, Saint-Raphael, France, 18–22 October 1999; Available online: http://www.bom.gov.au/OceanObs99/Papers/Griffiths.pdf (accessed on 23 February 2007).
- Lessing, P.; Henderson, D.; Edwards, B. Architecture and development of an environmental acquisition and reporting system. In Proceedings of the MTS-IEEE OCEANS’99 Conference II, Seattle, WA, USA, 7–9 September l999; pp. 785–788.
- Grisard, K. Eight years-experience with the Elbe Estuary environmental survey net. In Proceedings of the OES-IEEE OCEANS’94 Conference I, Brest, France, 13–16 September 1994; pp. 38–43. [Google Scholar]
- Sauzade, D.; Hénocque, Y.; Carof, A.H. Arcobleu, an integrated surveillance system for chronic and accidental pollution. Water Sci. Technol. 1995, 32, 25–31. [Google Scholar] [CrossRef]
- Canepa, E.; Pensieri, S.; Bozzano, R.; Faimali, M.; Traverso, P.; Cavaleri, L. The ODAS Italia1 buoy: More than forty years of activity in the Ligurian Sea. Progr. Oceanogr. 2015, 135, 48–63. [Google Scholar] [CrossRef]
- Autori Vari. Sistema Integrato per il Monitoraggio Automatico Della Rada di Augusta. II-Risultati dei Rilevamenti Della Rete di Monitoraggio (1990–1992); Rapporti Consiglio Nazionale delle Ricerche, Istituto Sperimentale Talassografico-Messina: Messina, Italy, 1994; Volume 7, pp. 1–241. (In Italian) [Google Scholar]
- Autori Vari. La Ricerca Scientifica per Venezia: Il Progetto Sistema Lagunare Veneziano; Istituto Veneto di Scienze, Lettere ed Arti: Venice, Italy, 2000. (In Italian) [Google Scholar]
- Zappalà, G.; Caruso, G.; Azzaro, F.; Crisafi, E. Marine environment monitoring in coastal Sicilian waters. WIT Trans. Ecol. Environ. 2006, 95, 337–346. [Google Scholar] [CrossRef]
- Zappalà, G.; Alberotanza, L.; Crisafi, E. Assessment of environmental conditions using automatic monitoring systems. In Proceedings of the MTS-IEEE OCEANS’99 Conference II, Seattle, WA, USA, 7–9 September l999; pp. 796–800.
- Zappalà, G.; Caruso, G.; Crisafi, E. Design and use of advanced technology devices for seawater monitoring. In Operational Oceanography; Implementation at the European and Regional Scales; Flemming, N.C., Vallerga, S., Pinardi, N., Behrens, H.W.A., Manzella, G., Prandle, D., Stel, J.H., Eds.; Oceanography Series; Elsevier: Amsterdam, The Netherlands, 2002; Volume 66. [Google Scholar] [CrossRef]
- Zappala, G.; Caruso, G.; Crisafi, E. The “SAM” integrated system for coastal monitoring. In Proceedings of the Fourth International Conference on Environmental Problems in Coastal Regions, Coastal Environment IV; Brebbia, C.A., Ed.; WIT Press: Southampton, UK; Boston, UK, 2002; pp. 341–350. [Google Scholar] [CrossRef]
- Zappalà, G. A software set for environment monitoring networks. In Proceedings of the Envirosoft 2004, Ancona, Italy, 2–4 June 2004; Latini, G., Passerini, G., Brebbia, C.A., Eds.; WIT Press: Southampton, UK; Boston, UK, 2004; pp. 3–12. [Google Scholar]
- Autori Vari. Piani di Potenziamento della Rete Scientifica e Tecnologica; Ministero dell’Istruzione, dell’Università e della Ricerca: Rome, Italy, 1999. (In Italian)
- Zappalà, G.; Azzaro, F. A new generation of coastal monitoring platforms. Chem. Ecol. 2004, 20, 387–398. [Google Scholar] [CrossRef]
- Zappalà, G. A versatile software-hardware system for environmental data acquisition and transmission. WIT Trans. Model. Simul. 2009, 48, 283–294. [Google Scholar] [CrossRef]
- Autori Vari. Realizzazione ed attivazione di una rete integrata di piattaforme costiere e mezzo mobile attrezzati per Sistemi Avanzati di Monitoraggio delle acque (SAM). In Programma Cluster 10-Potenziamento delle Reti di Ricerca Nelle aree Depresse; Rendicontazione Scientifica Finale, CNR-Istituto Sperimentale Talassografico Messina: Messina, Italy, 2004. (In Italian) [Google Scholar]
- Zappalà, G.; Caruso, G.; Piermattei, V.; Bonamano, S.; Madonia, A.; Cicco, A.D.; Martellucci, R.; Marcelli, M. Integrated marine measurements in Civitavecchia, near Rome. WIT Trans. Model. Simul. 2013, 55, 221–235. [Google Scholar] [CrossRef]
- Zappalà, G.; Piermattei, V.; Madonia, A.; Martellucci, R.; Bonamano, S.; Pierattini, A.; Burgio, C.; Marcelli, M. Assessment of environmental conditions in Civitavecchia (Rome, Italy) harbour. WIT Trans. Ecol. Environ. 2014, 182, 271–282. [Google Scholar] [CrossRef]
- Zappalà, G.; Caruso, G.; Bonamano, S.; Madonia, A.; Piermattei, V.; Martellucci, R.; Di Cicco, A.; Pannocchi, A.; Stefanì, C.; Borsellino, C.; et al. A multi-platform approach to marine environment assessment in the Civitavecchia (Rome) area. J. Oper. Oceanogr. 2016, 9, s131–s143. [Google Scholar] [CrossRef]
- Zappalà, G.; Caruso, G.; Crisafi, E. Coastal pollution monitoring by an automatic multisampler coupled with a fluorescent antibody assay. Environ. Stud. 2004, 10, 125–133. [Google Scholar] [CrossRef]
- Zappalà, G.; Bruzzone, G.; Caruso, G.; Azzaro, M. Development of an automatic sampler for extreme polar environments: First in situ application in Svalbard Islands. Rend. Lincei 2016, 27, S251–S259. [Google Scholar] [CrossRef]
- Zappalà, G.; Bruzzone, G.; Azzaro, M.; Caruso, G. New advanced technology devices for operational oceanography in extreme conditions. Int. J. Sustain. Develop. Plan. 2017, 12, 61–70. [Google Scholar] [CrossRef]
- Piermattei, V.; Madonia, A.; Bonamano, S.; Martellucci, R.; Bruzzone, G.; Ferretti, R.; Odetti, A.; Azzaro, M.; Zappalà, G.; Marcelli, M. Cost-effective technologies to study the Arctic Ocean environment. Sensors 2018, 18, 2257. [Google Scholar] [CrossRef] [PubMed]
- Pinardi, N.; Allen, I.; Demirov, E.; De Mey, P.; Korres, G.; Laskaratos, A.; LeTraon, P.Y.; Maillard, C.; Manzella, G.; Tziavos, C. The Mediterranean Ocean Forecasting System: First phase of implementation (1998–2001). Ann. Geophys. 2003, 21, 3–20. [Google Scholar] [CrossRef]
- Marcelli, M.; Di Maio, A.; Donis, D.; Mainardi, U.; Manzella, G. Development of a new expendable probe for the study of the pelagic ecosystems from Voluntary Observing Ships. Ocean Sci. 2007, 3, 311–320. [Google Scholar] [CrossRef]
- Pasculli, L.; Piermattei, V.; Madonia, A.; Bruzzone, G.; Caccia, M.; Ferretti, R.; Odetti, A.; Marcelli, M. New Cost-Effective Technologies Applied to the Study of the Glacier Melting Influence on Physical and Biological Processes in Kongsfjorden Area (Svalbard). J. Mar. Sci. Eng. 2020, 8, 593. [Google Scholar] [CrossRef]
- Marcelli, M.; Piermattei, V.; Madonia, A.; Mainardi, U. Design and Application of NewLow-Cost Instruments for Marine Environmental Research. Sensors 2014, 14, 23348–23364. [Google Scholar] [CrossRef]
- Marcelli, M.; Piermattei, V.; Gerin, R.; Brunetti, F.; Pietrosemoli, E.; Addo, S.; Boudaya, L.; Coleman, R.; Olubumni, N.; Rick, J.; et al. Toward the widespread application oflow-cost technologies in coastal ocean observing (Internet of Things for the Ocean). Medit. Mar. Sci. 2021, 22, 255–269. [Google Scholar] [CrossRef]
- Bourma, E.; Perivoliotis, L.; Petihakis, G.; Korres, G.; Frangoulis, C.; Ballas, D.; Zervakis, V.; Tragou, E.; Katsafados, P.; Spyrou, C.; et al. The Hellenic Marine Observing, Forecasting and Technology System—An Integrated Infrastructure for Marine Research. J. Mar. Sci. Eng. 2022, 10, 329. [Google Scholar] [CrossRef]
- Wang, J.; Wang, Z.; Wang, Y.; Liu, S.; Li, Y. Current situation and trend of marine data buoy and monitoring network technology of China. Acta Oceanol. Sin. 2016, 35, 1–10. [Google Scholar] [CrossRef]
- Vargas-Yáñez, M.; Moya, F.; Serra, M.; Juza, M.; Jordà, G.; Ballesteros, E.; Alonso, C.; Pascual, J.; Salat, J.; Moltó, V.; et al. Observations in the Spanish Mediterranean Waters: A Review and Update of Results of 30-Year Monitoring. J. Mar. Sci. Eng. 2023, 11, 1284. [Google Scholar] [CrossRef]
- She, J.; Allen, I.; Buch, E.; Crise, A.; Johannessen, J.A.; Le Traon, P.-Y.; Lips, U.; Nolan, G.; Pinardi, N.; Reißmann, J.H.; et al. Developing European operational oceanography for Blue Growth, climate change adaptation and mitigation, and ecosystem-based management. Ocean Sci. 2016, 12, 953–976. [Google Scholar] [CrossRef]
- Danovaro, R.; Carugati, L.; Berzano, M.; Cahill, A.E.; Carvalho, S.; Chenuil, A.; Corinaldesi, C.; Cristina, S.; David, R.; Dell’Anno, A.; et al. Implementing and Innovating Marine Monitoring Approaches for Assessing Marine Environmental Status. Front. Mar. Sci. 2016, 3, 213. [Google Scholar] [CrossRef]
- Bean, T.P.; Greenwood, N.; Beckett, R.; Biermann, L.; Bignell, J.P.; Brant, J.L.; Copp, G.H.; Devlin, M.J.; Dye, S.; Feist, S.W.; et al. A Review of the Tools Used for Marine Monitoring in the UK: Combining Historic and Contemporary Methods with Modeling and Socioeconomics to Fulfill Legislative Needs and Scientific Ambitions. Front. Mar. Sci 2017, 4, 263. [Google Scholar] [CrossRef]
- Tintoré, J.; Pinardi, N.; Alvarez-Fanjul, E.; Aguiar, E.; Alvarez-Berastegui, D.; Bajo, M.; Balbin, R.; Bozzano, R.; Bozzano, R.; Nardelli, B.B.; et al. Challenges for Sustained Observing and Forecasting Systems in the Mediterranean Sea. Front. Mar. Sci. 2019, 6, 568. [Google Scholar] [CrossRef]
- Kaiser, B.A.; Hoeberechts, M.; Maxwell, K.H.; Eerkes-Medrano, L.; Hilmi, N.; Safa, A.; Horbel, C.; Juniper, S.K.; Roughan, M.; Theux Lowen, N.; et al. The Importance of Connected Ocean Monitoring Knowledge Systems and Communities. Front. Mar. Sci. 2019, 6, 309. [Google Scholar] [CrossRef]
- Cordeiro, C.A.; Aued, A.W.; Barros, F.; Bastos, A.C.; Bender, M.; Mendes, T.C.; Creed, J.C.; Cruz, I.C.; Dias, M.S.; Fernandes, L.D.; et al. Long-term monitoring projects of Brazilian marine and coastal ecosystems. Peer J 2022, 10, e14313. [Google Scholar] [CrossRef]
- Heymans, J.J.; Bundy, A.; Christensen, V.; Coll, M.; De Mutsert, K.; Fulton, E.A.; Piroddi, C.; Shin, Y.-J.; Steenbeek, J.; Travers-Trolet, M. The Ocean decade: A true ecosystem modeling challenge. Front. Mar. Sci. 2020, 7, 554573. [Google Scholar] [CrossRef]
- Visbeck, M. Ocean science research is key for a sustainable future. Nat. Comm. 2018, 9, 690. [Google Scholar] [CrossRef]
- Zappalà, G.; Caruso, G.; Piermattei, V.; Madonia, A.; Bonamano, S.; Petri, A.; Marcelli, M. Devices for environmental observations. WIT Trans. Eng. Sci. 2018, 125, 61–71. [Google Scholar] [CrossRef]
- Systea Analytical Technologies. Available online: https://www.systea.it (accessed on 2 June 2023).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instrument | Parameter | Accuracy | Resolution |
|---|---|---|---|
| IDROMAR IM50 | TEMPERATURE | 0.02 °C | 0.0025 °C |
| IDROMAR IM50 | CONDUCTIVITY | 0.02 mS/cm | 0.004 mS/cm |
| IDROMAR IM50 | DISSOLVED OXYGEN | 2% sat | 0.01%sat |
| IDROMAR IM50 | FLUORESCENCE | 0.05 µg/L | 0.0035 µg/L (f.s. 50) |
| IDROMAR IM50 | TURBIDITY | 1 FTU | 0.015 FTU (f.s. 200 FTU) |
| SEA-BIRD 39T | TEMPERATURE | 0.002 °C | 0.0001 °C |
| SYSTEA NPA | PO4–P (range) | 5–500 µg/L | |
| SYSTEA NPA | NH4–N (range) | 3–1000 µg/L | |
| SYSTEA NPA | (NO3+NO2)–N (range) | 10–500 µg/L | |
| SYSTEA NPA | NO2–N (range) | 2–200 µg/L |
| 1989–1990 First Buoy | 1991–1992 Augusta Buoy | Venice Lagoon System | Prisma 2 | Cluster Platforms | Civitavecchia Platform | |
|---|---|---|---|---|---|---|
| Data acquisition | Commercial closed system | Commercial closed system | Experimental system | Experimental system | Experimental System | Experimental System |
| Static sensors | Multiparametric probe | T, C, DO, Fl, TU | Triaxial Doppler Anemometers | Multiparametric probe—radiometer | Multiparametric probe—SBE 39T probes | Multiparametric probe—SBE 39T probes |
| Measurement equipment (e.g., analyzers) | NO | NO | NO | MicroMac 1000 ammonia analyzer | Experimental NPA nutrient analyzer—pumping system—water sampler—meteo station | All the instruments of cluster platforms could be installed |
| Transmission technology | VHF—basic modem | UHF—radio modem | UHF—smart packet radio modem | GSM telephony | GSM Telephony and SMS | GPRS Telephony and Internet |
| Recharging systems | NO | NO | YES | YES | Solar panels and wind generator | Solar panels and wind generator |
| Un-mooring alarm | NO | NO | N.A. | N.A. | YES | YES |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zappalà, G.; Caruso, G. Coastal Marine Monitoring Experiments at the National Research Council in Messina, Italy: 30 Years of Research. J. Mar. Sci. Eng. 2023, 11, 1958. https://doi.org/10.3390/jmse11101958
Zappalà G, Caruso G. Coastal Marine Monitoring Experiments at the National Research Council in Messina, Italy: 30 Years of Research. Journal of Marine Science and Engineering. 2023; 11(10):1958. https://doi.org/10.3390/jmse11101958
Chicago/Turabian StyleZappalà, Giuseppe, and Gabriella Caruso. 2023. "Coastal Marine Monitoring Experiments at the National Research Council in Messina, Italy: 30 Years of Research" Journal of Marine Science and Engineering 11, no. 10: 1958. https://doi.org/10.3390/jmse11101958
APA StyleZappalà, G., & Caruso, G. (2023). Coastal Marine Monitoring Experiments at the National Research Council in Messina, Italy: 30 Years of Research. Journal of Marine Science and Engineering, 11(10), 1958. https://doi.org/10.3390/jmse11101958