
Analysis of Flow-Induced Vibration Control in a Pontoon Carrier Based on a Pendulum-Tuned Mass Damper
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Dynamic Model of SSXCTD Buoyancy Vehicle
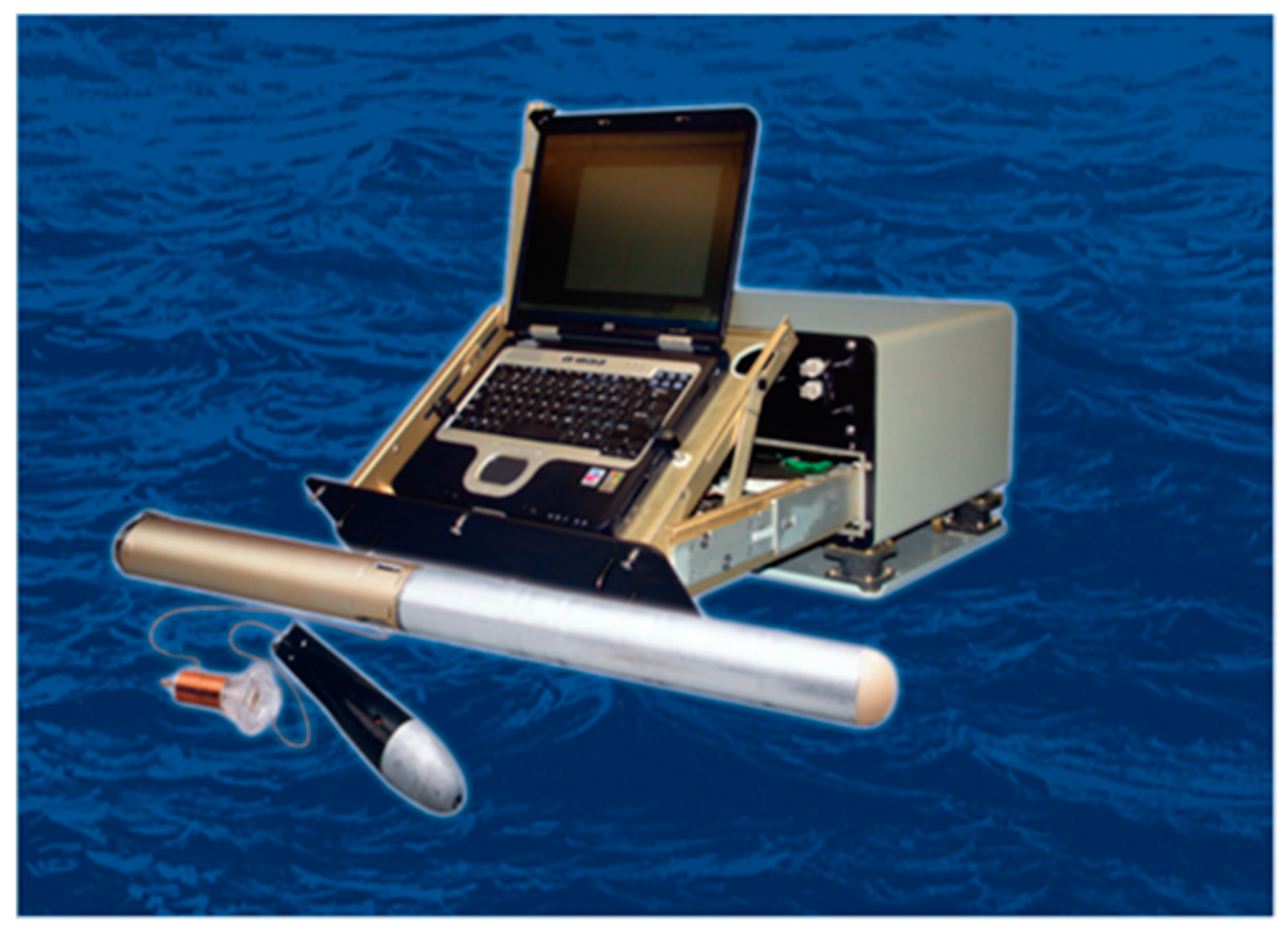
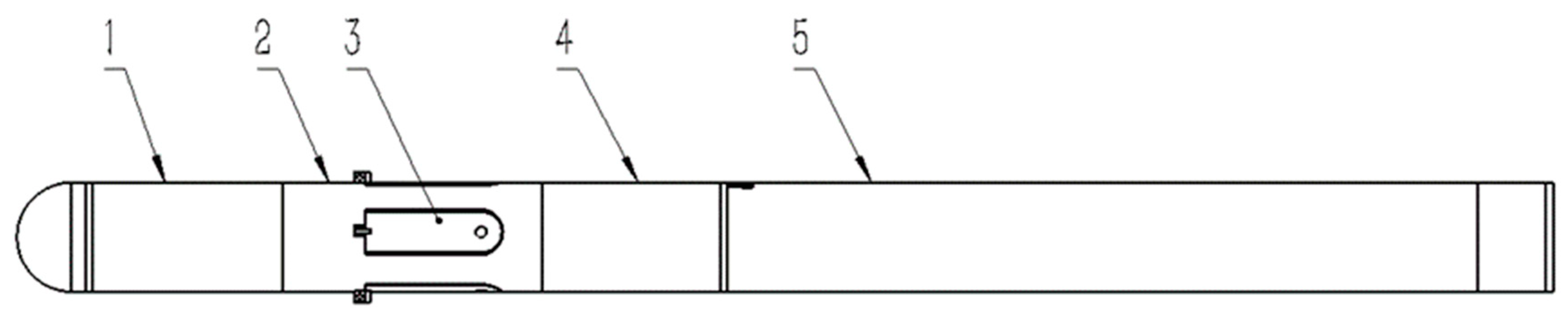
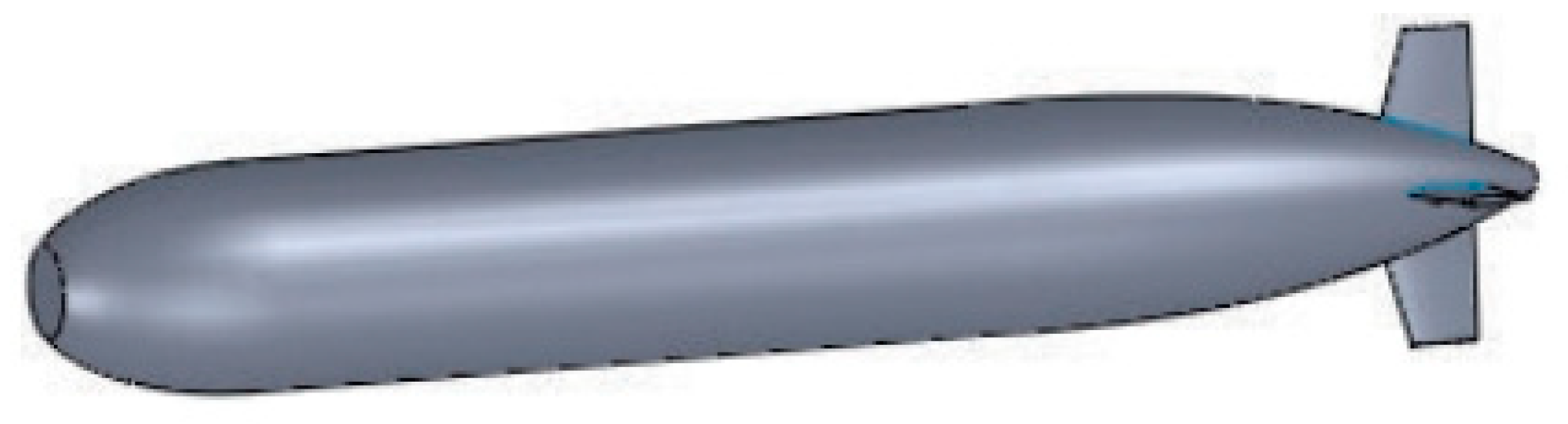
2.1. SSXCTD Buoyancy Vehicle
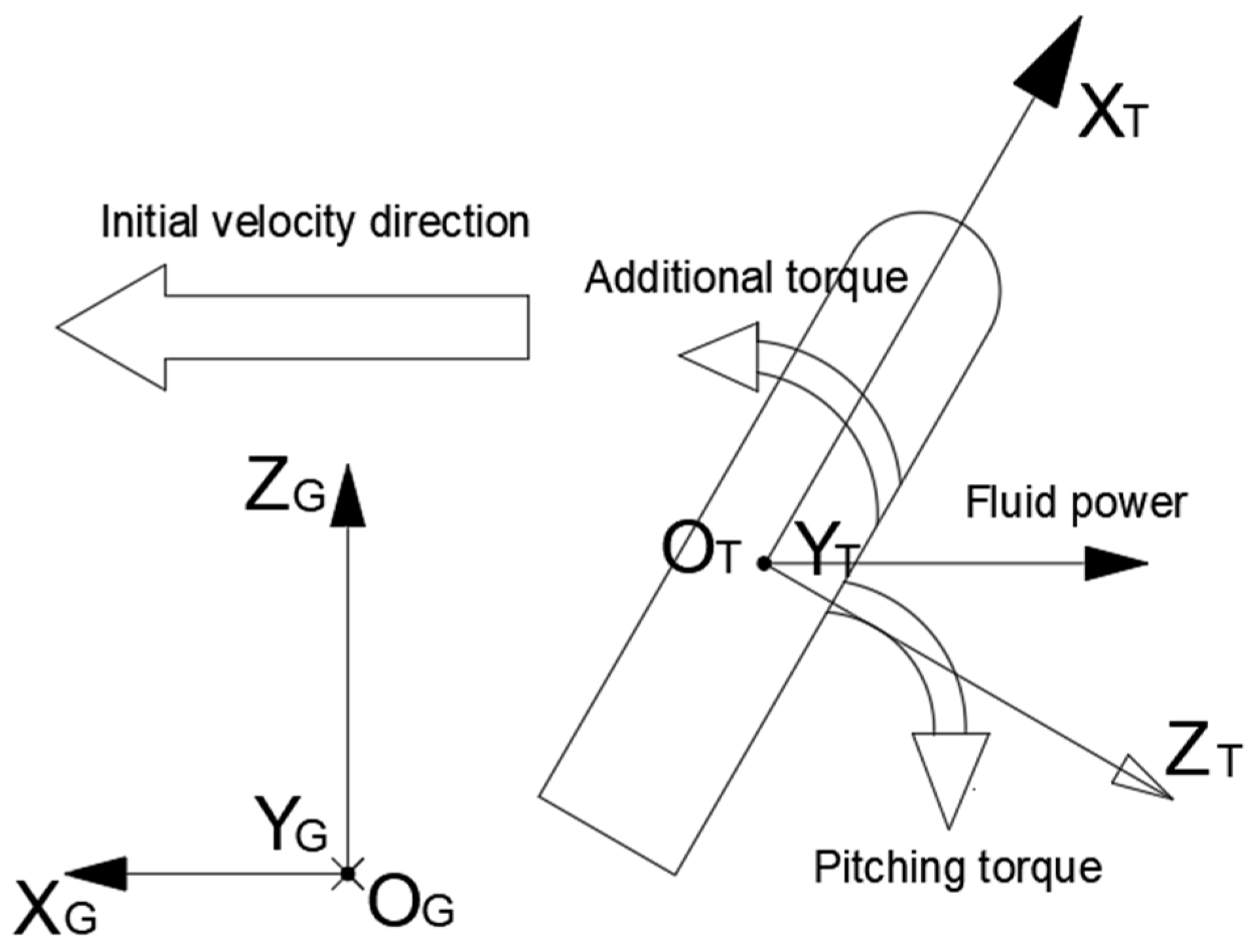
2.2. The Dynamical Model of the SSXCTD Buoyancy Vehicle
2.3. Analysis of Buoyancy Vehicle’s Attitude Stability
3. PTMD System Design
3.1. The Working Principle of the PTMD System
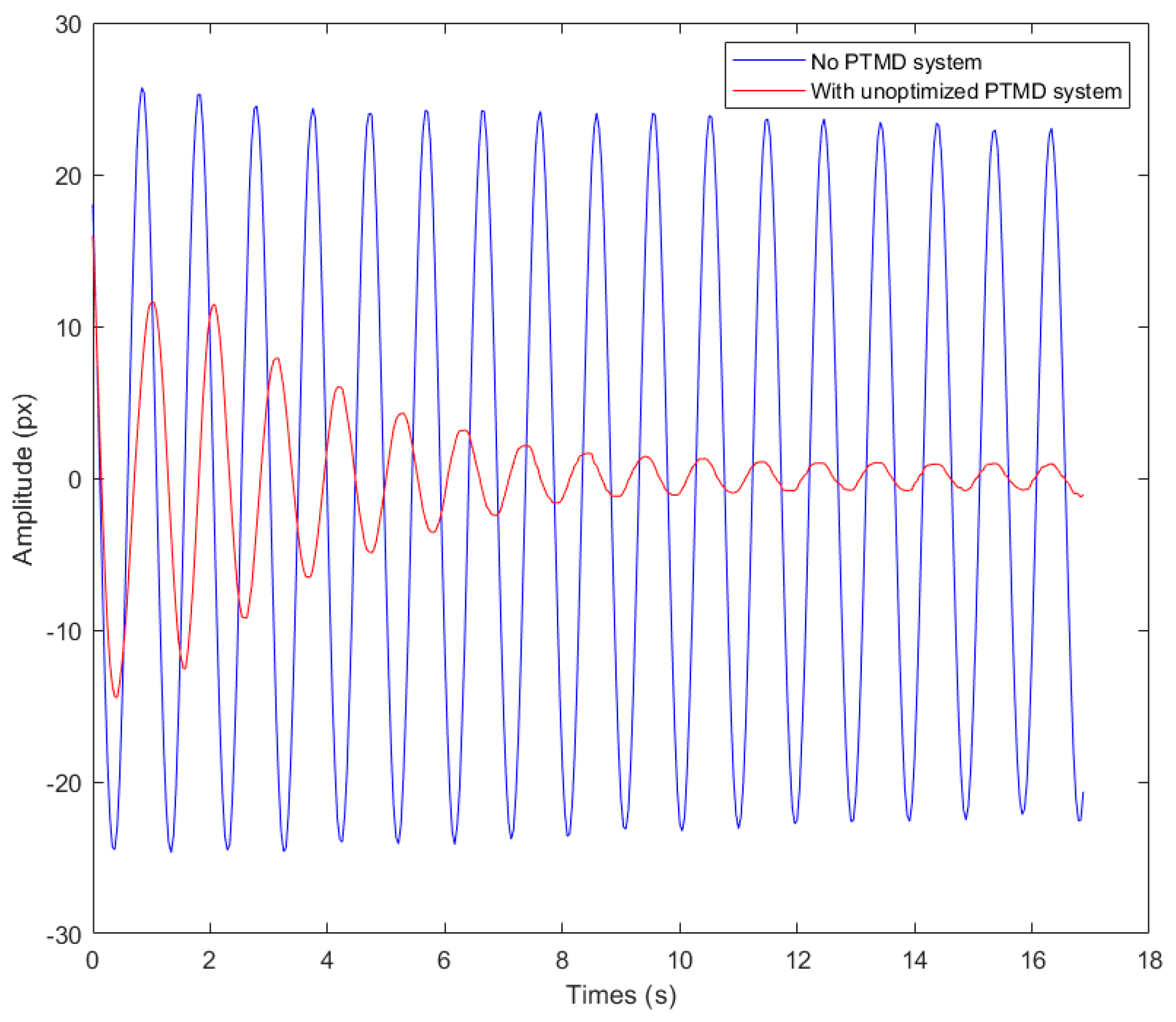
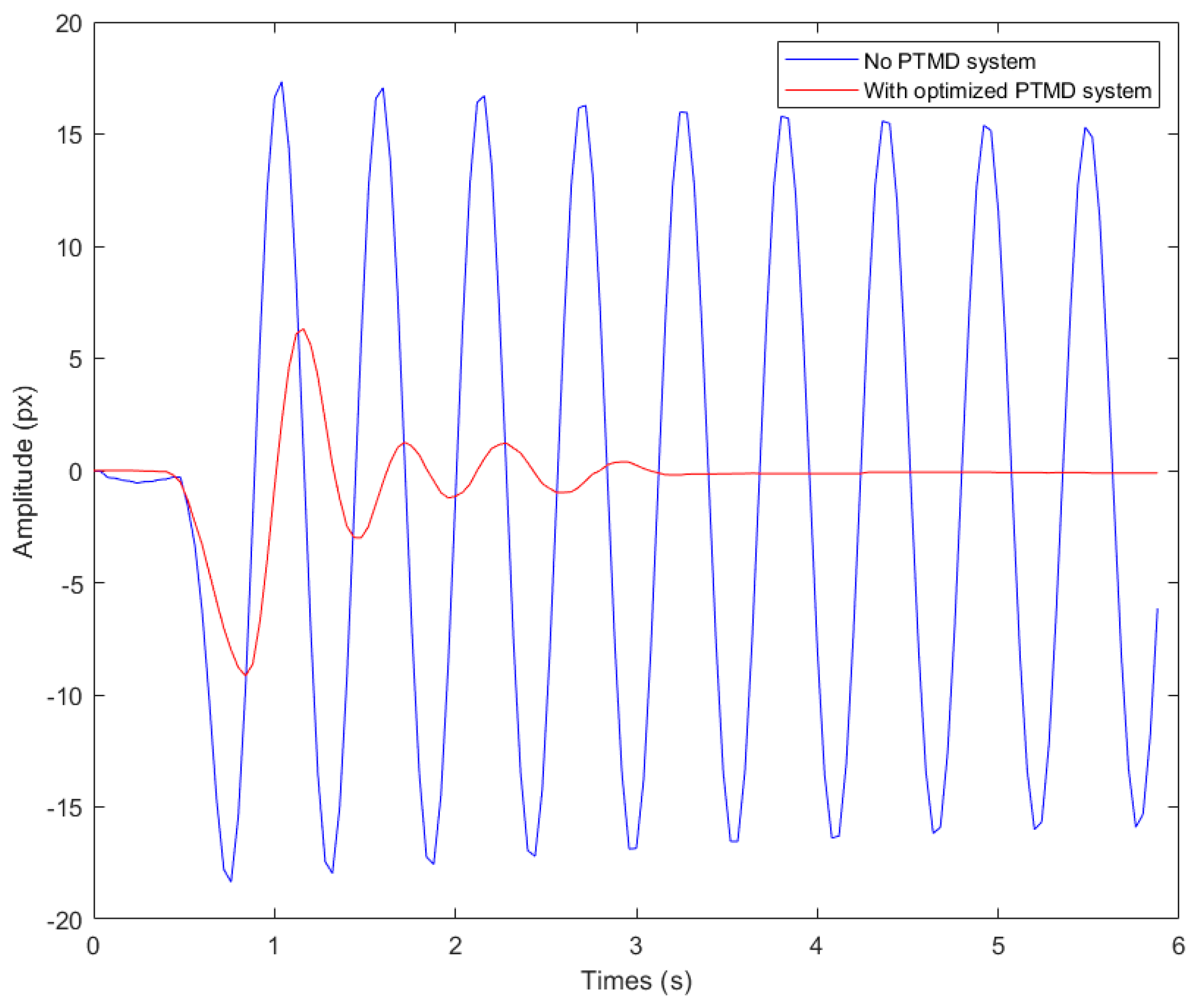
3.2. Numerical Calculations for PTMD System Design
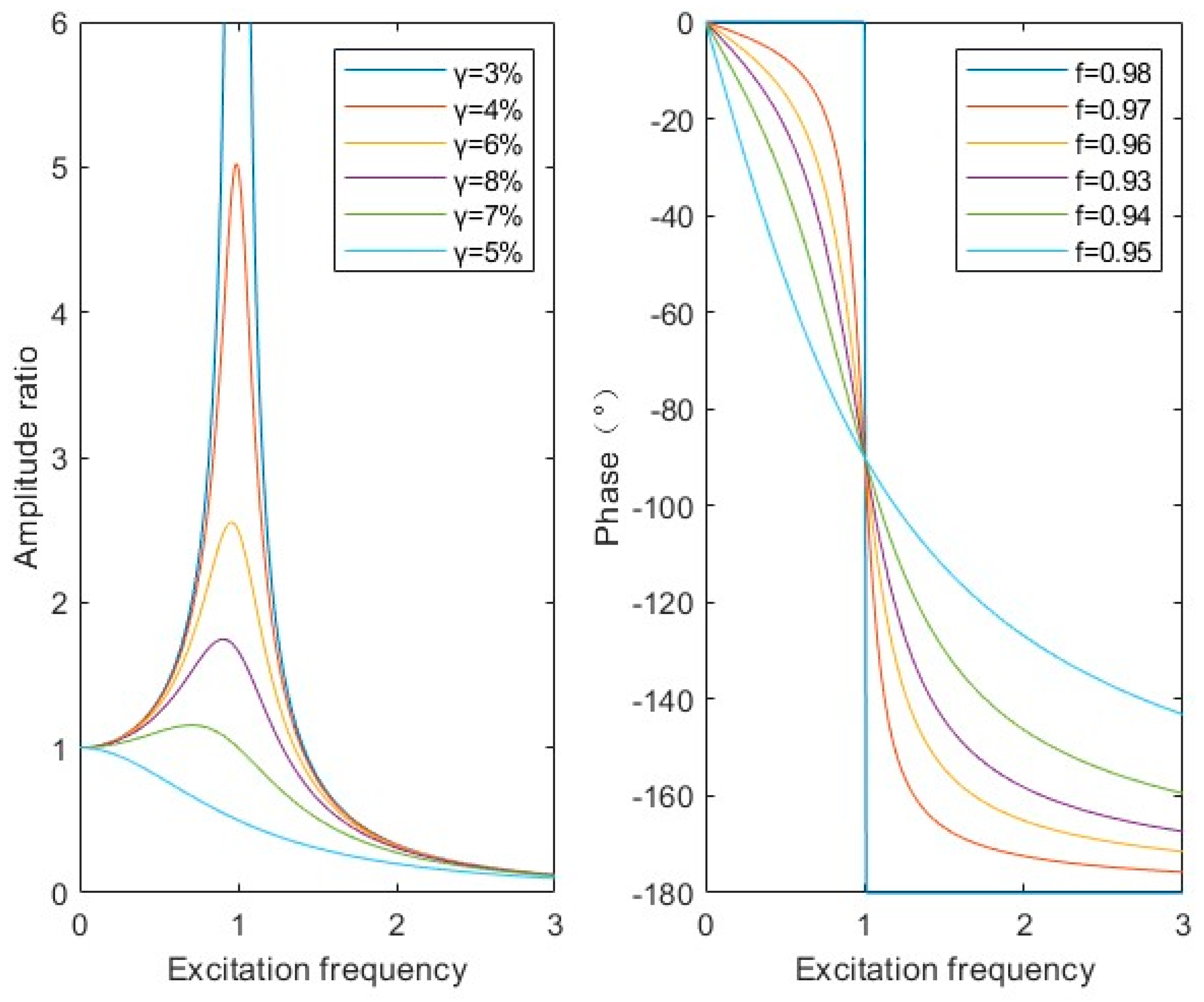
3.3. Analysis of the Computational Results
4. Finite Volume Simulation of SSXCTD Floating Buoy’s Motion and Attitude
4.1. Introduction to the SSXCTD Model
4.2. Domain and Boundary Condition Settings for Calculation
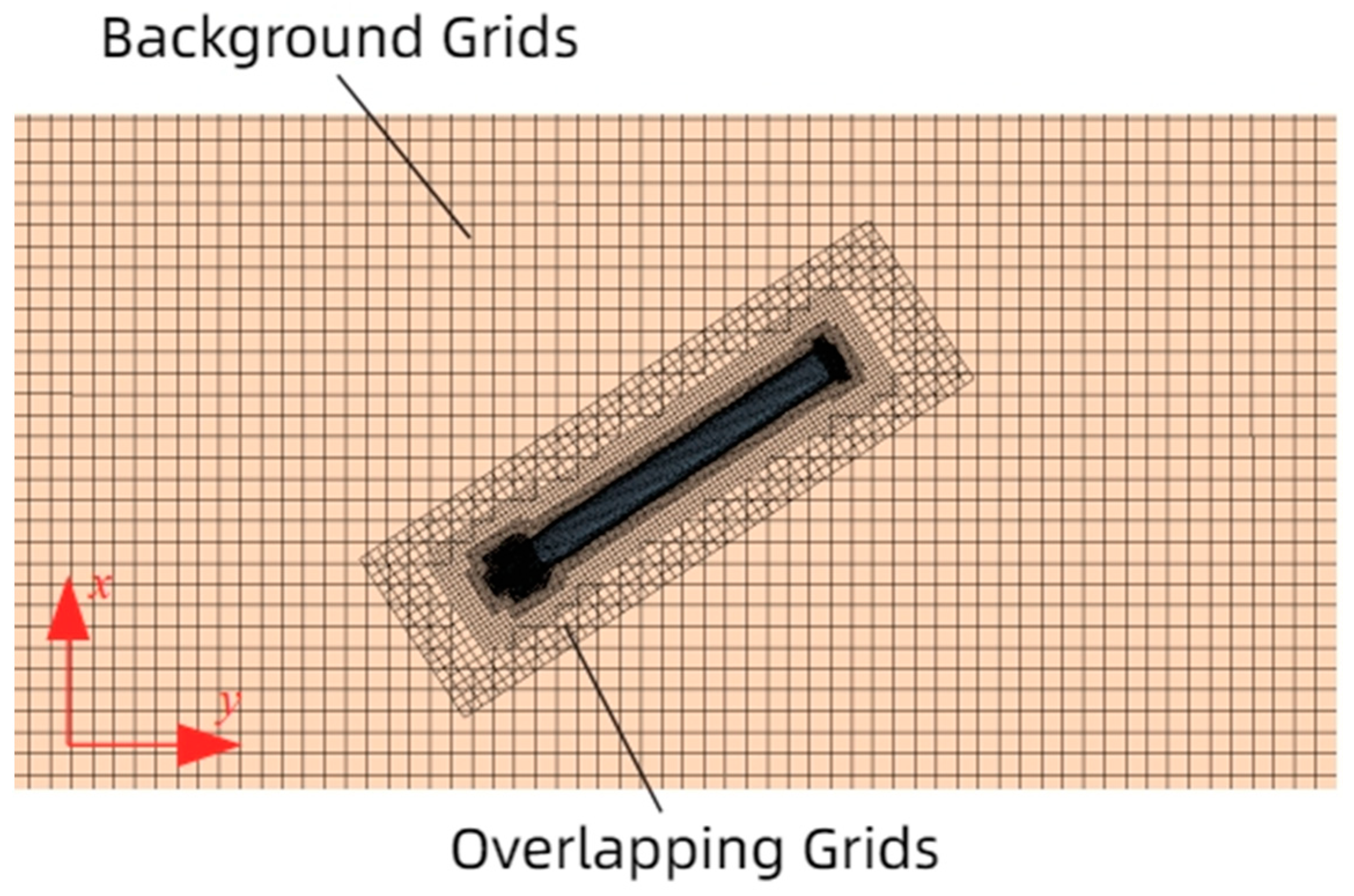
4.3. Computational Domain Meshing
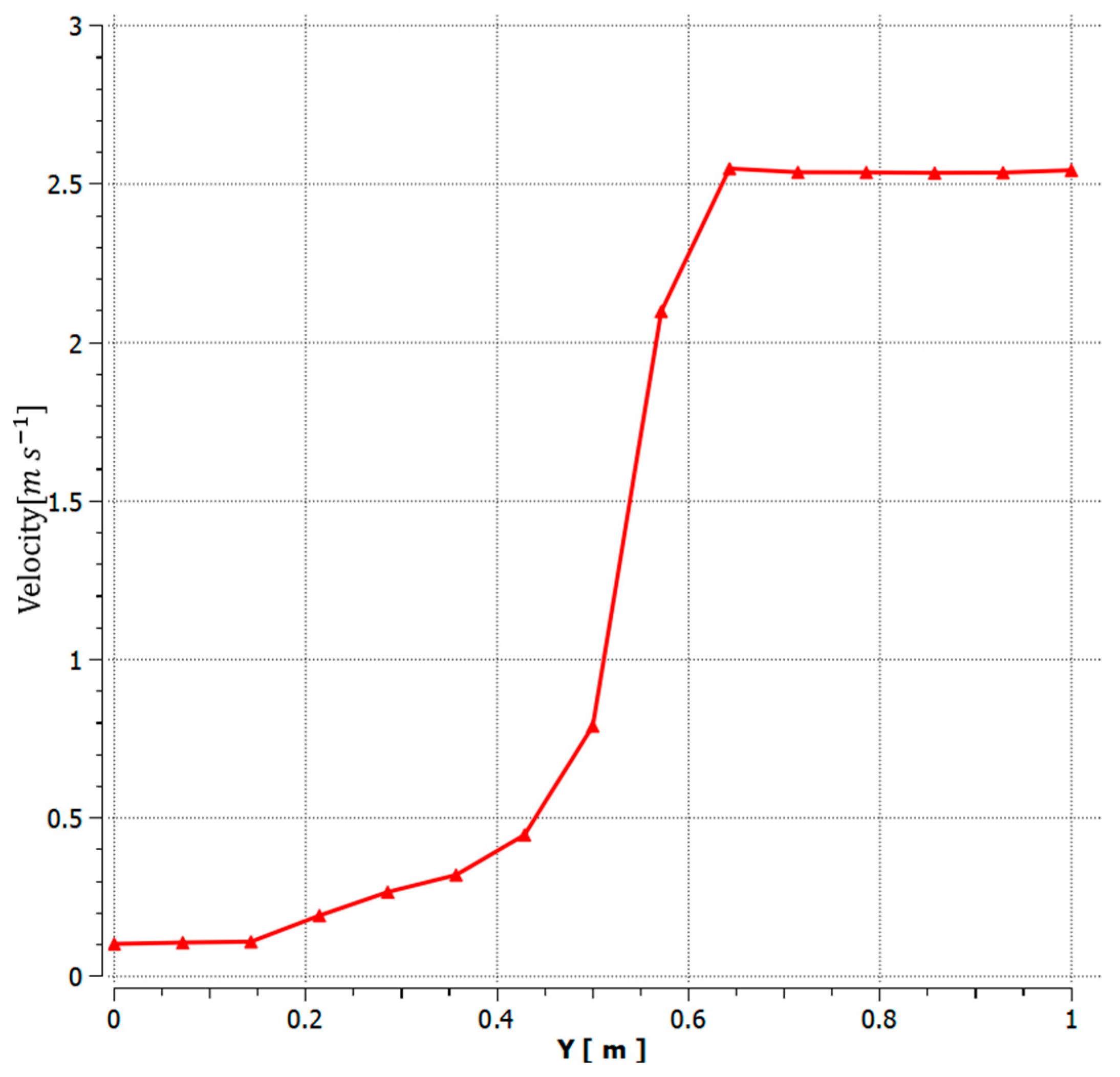
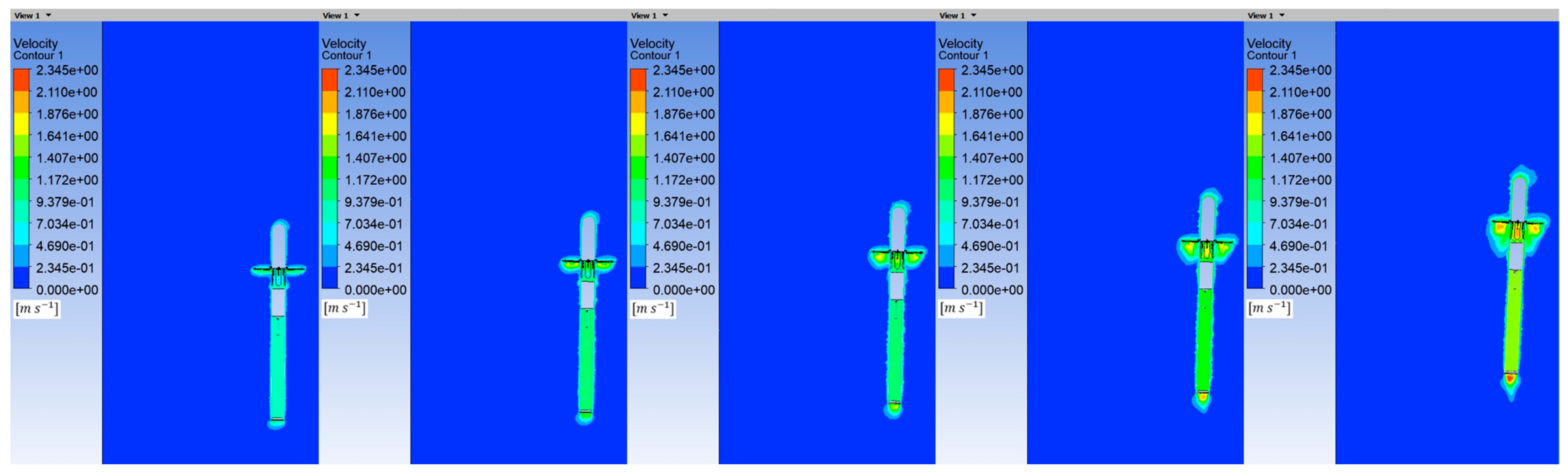
4.4. Numerical Simulation Results
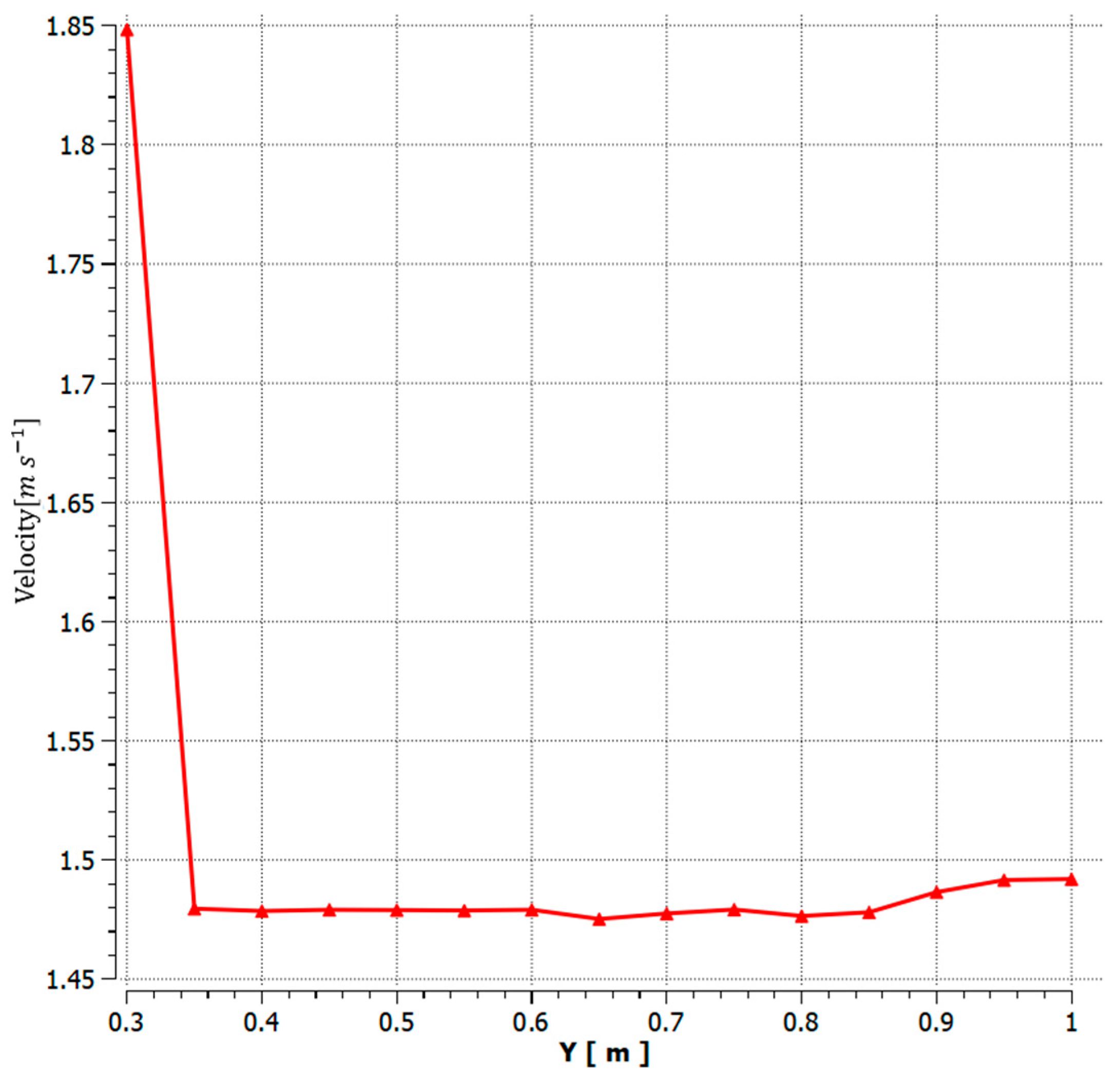
4.5. Comparison of Numerical Simulation Results
5. Conclusions
6. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shi, X.; Su, Q. Development status of expendable ocean instruments and equipment. Acoust. Electron. Eng. 2015, 4, 46–48. [Google Scholar]
- Chen, W.; Zhang, L.; Sun, X.; Duan, J. Overview of the application and development of expendable ocean temperature-depth profiler. J. Oceanogr. 2020, 44, 114–122. [Google Scholar]
- Hu, Y.; Xu, J.; Cheng, C.; Zhou, H.; Cai, X. Passive vibration control of floating offshore wind turbine based on electromechanical inertial capacitance. J. Mech. Eng. 2023, 59, 202–211. [Google Scholar]
- Tan, J.; Ho, S.C.M.; Zhang, P.; Jiang, J. Experimental Study on Vibration Control of Suspended Piping System by SingleSided Pounding Tuned Mass Damper. Appl. Sci. 2019, 9, 285. [Google Scholar] [CrossRef]
- Guan, X.; Guo, H.; Wang, H.; Wang, Z. Parameter optimization of TMD based on genetic algorithm. J. Xi’an Univ. Archit. Technol. (Nat. Sci. Ed.) 2023, 55, 211–216. [Google Scholar] [CrossRef]
- Xia, H. Collision Damping and Vibration Reduction Control of Offshore Wind Turbine under Combined Wind and Wave Action. Master’s Thesis, Wuhan University of Technology, Wuhan, China, 2020. [Google Scholar] [CrossRef]
- Lockheed Martin. Submarine-Launched Expendable Profiling System; Lockheed Martin: Washington, DC, USA, 2003. [Google Scholar]
- Geng, B.; Xu, Z.; Pei, Y. Underwater motion modeling and simulation of unmanned carriers. Comput. Simul. 2017, 34, 6–9+67. [Google Scholar]
- Wang, C.; Shi, W. Optimal Design and Application of a Multiple Tuned Mass Damper System for an In-Service Footbridge. Sustainability 2019, 11, 2801. [Google Scholar] [CrossRef]
- Rong, J. Study on the attitude motion stability of unmanned carriers. Adv. Hydrodyn. (Ser. A) 1998, 1, 88–94. [Google Scholar]
- Ouyang, L. Design and Analysis of Tuned Mass Damper. Ph.D. Thesis, Huazhong University of Science and Technology, Wuhan, China, 2017. [Google Scholar]
- Li, H. Structural Vibration Control Research Based on Strong Magnetic Array Tuned Mass Damper. Ph.D. Thesis, Dalian University of Technology, Dalian, China, 2022. [Google Scholar] [CrossRef]
- Cai, Q.; Zhang, Y.; Wang, Y.; Zhang, P. Ballistic characterisation of uplift of large depth unpowered vehicle. Comput. Simul. 2012, 29, 38–41+50. [Google Scholar]
- Den Hartog, J.P. Mechanical Vibrations, 4th ed.; McGraw Hill: New York, NY, USA, 1956. [Google Scholar]
- Liu, X.; Shi, W.; Chen, X. Introduction to pendulum-type TMD and analysis of its vibration reduction performance. Struct. Eng. 2012, 28, 66–71. [Google Scholar] [CrossRef]
- Liu, L.; Tan, P.; Li, X.; Zhang, Y.; Zhou, F. Analysis of phase and control effect of TMD control system. J. Vib. Shock 2015, 34, 160–165. [Google Scholar] [CrossRef]
- Shi, W.; Wang, L.; Yan, J.; Shan, J. Research on the vibration reduction performance of an improved self-tuning pendulum-type TMD. J. Huazhong Univ. Sci. Technol. (Nat. Sci. Ed.) 2018, 46, 40–45. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhai, J.; Zhang, X. Water trajectory simulation of unmanned carriers based on Simulink. Silicon Val. 2011, 22, 20–21+50. [Google Scholar]
- Zhang, H.; Gu, H.; Lin, Y.; Gao, H.; Feng, M. Analysis of inclined climbing up-floating characteristics of unmanned carriers. Chin. Ship Res. 2020, 15, 38–47. [Google Scholar] [CrossRef]
- Yuan, H.; Guan, Q.; Zhang, T. South Pacific ocean current speed prediction based on LSTM-BP combined model. Bull. Oceanogr. Limnol. 2022, 44, 10–16. [Google Scholar] [CrossRef]
- Wang, K.; Li, F.; Yang, X. Estimation of sea current velocity using ocean environmental noise. Appl. Acoust. 2022, 41, 263–269. [Google Scholar]
- Zhang, H. Research on Hydrodynamic Characteristics of Deep-Sea Vehicle without Power Uplift. Master’s Thesis, Northeastern University, Xi’an, China, 2020. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, L.; Cui, Y.; Ma, Y.; Liu, J.; Liu, Z. Analysis of Flow-Induced Vibration Control in a Pontoon Carrier Based on a Pendulum-Tuned Mass Damper. J. Mar. Sci. Eng. 2023, 11, 1963. https://doi.org/10.3390/jmse11101963
Du L, Cui Y, Ma Y, Liu J, Liu Z. Analysis of Flow-Induced Vibration Control in a Pontoon Carrier Based on a Pendulum-Tuned Mass Damper. Journal of Marine Science and Engineering. 2023; 11(10):1963. https://doi.org/10.3390/jmse11101963
Chicago/Turabian StyleDu, Libin, Yongchao Cui, Yanqun Ma, Jie Liu, and Zezheng Liu. 2023. "Analysis of Flow-Induced Vibration Control in a Pontoon Carrier Based on a Pendulum-Tuned Mass Damper" Journal of Marine Science and Engineering 11, no. 10: 1963. https://doi.org/10.3390/jmse11101963