
Numerical Investigation on Interactive Hydrodynamic Performance of Two Adjacent Unmanned Underwater Vehicles (UUVs)



Abstract
:1. Introduction
2. Materials and Methods
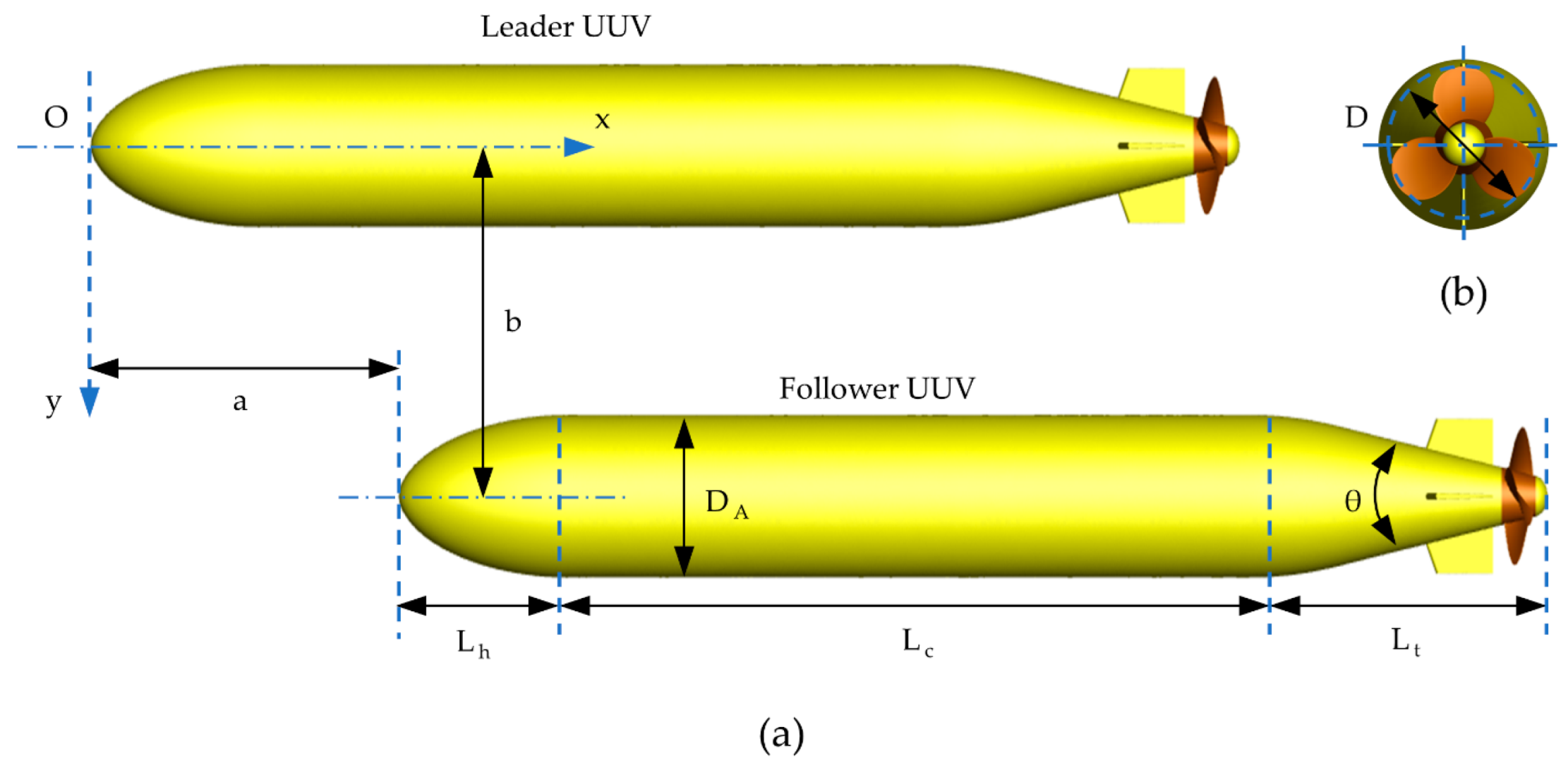
2.1. UUV Geometry Parameters
2.2. Definition of Dimensionless Parameters
3. Numerical Methods
3.1. Governing Equations
3.2. Computational Domain and Boundary Conditions
3.3. Meshing Settings
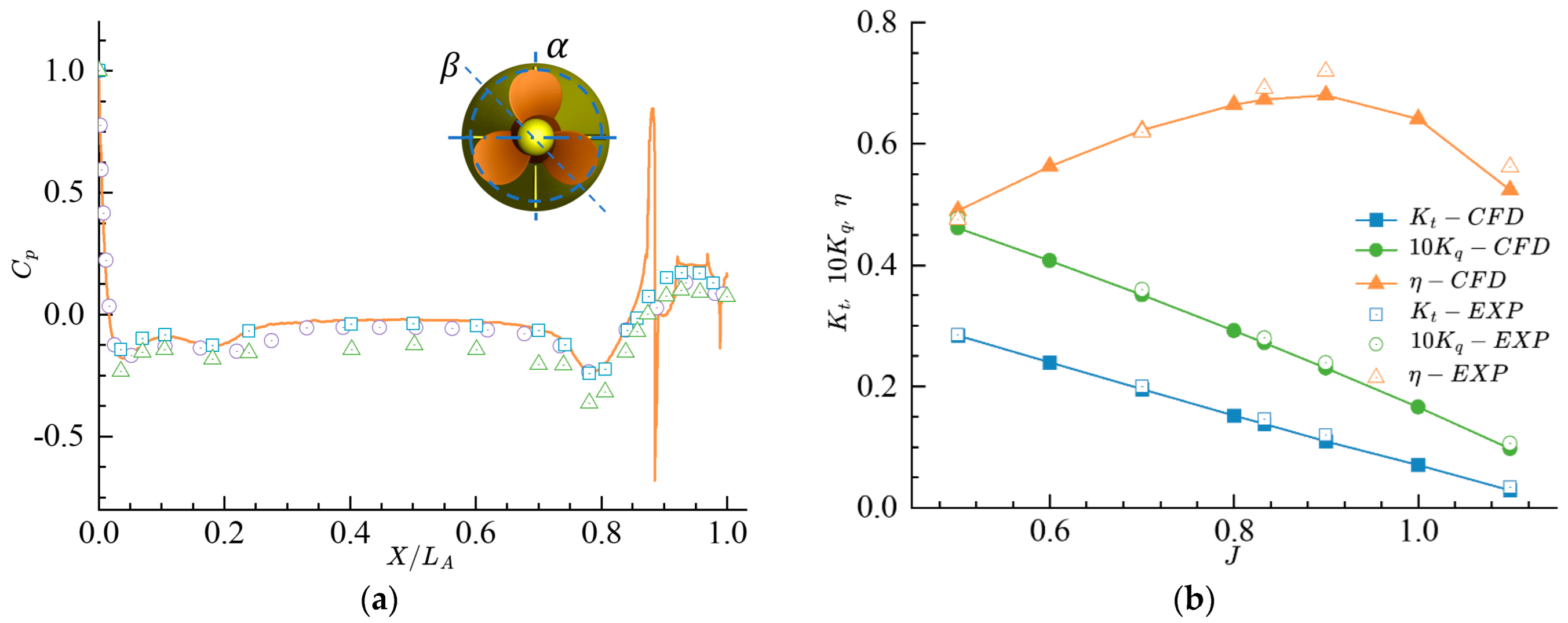
3.4. Verification of Numerical Method
4. Results and Discussion
4.1. Single Propeller UUV Numerical Simulation Results
4.2. Numerical Results of the Hydrodynamic Test of the UUV Formation
4.2.1. Influence of a UUV’s Relative Distance on Hydrodynamic Performance
4.2.2. Influence of a UUV’s Relative Distance on Hydrodynamic Performance
5. Conclusions
- When analyzing the drag coefficient of an individual UUV within a formation, the map depicting relative distances primarily divides into pull and push regions. The extreme values of and in the heat map are located in the same position;
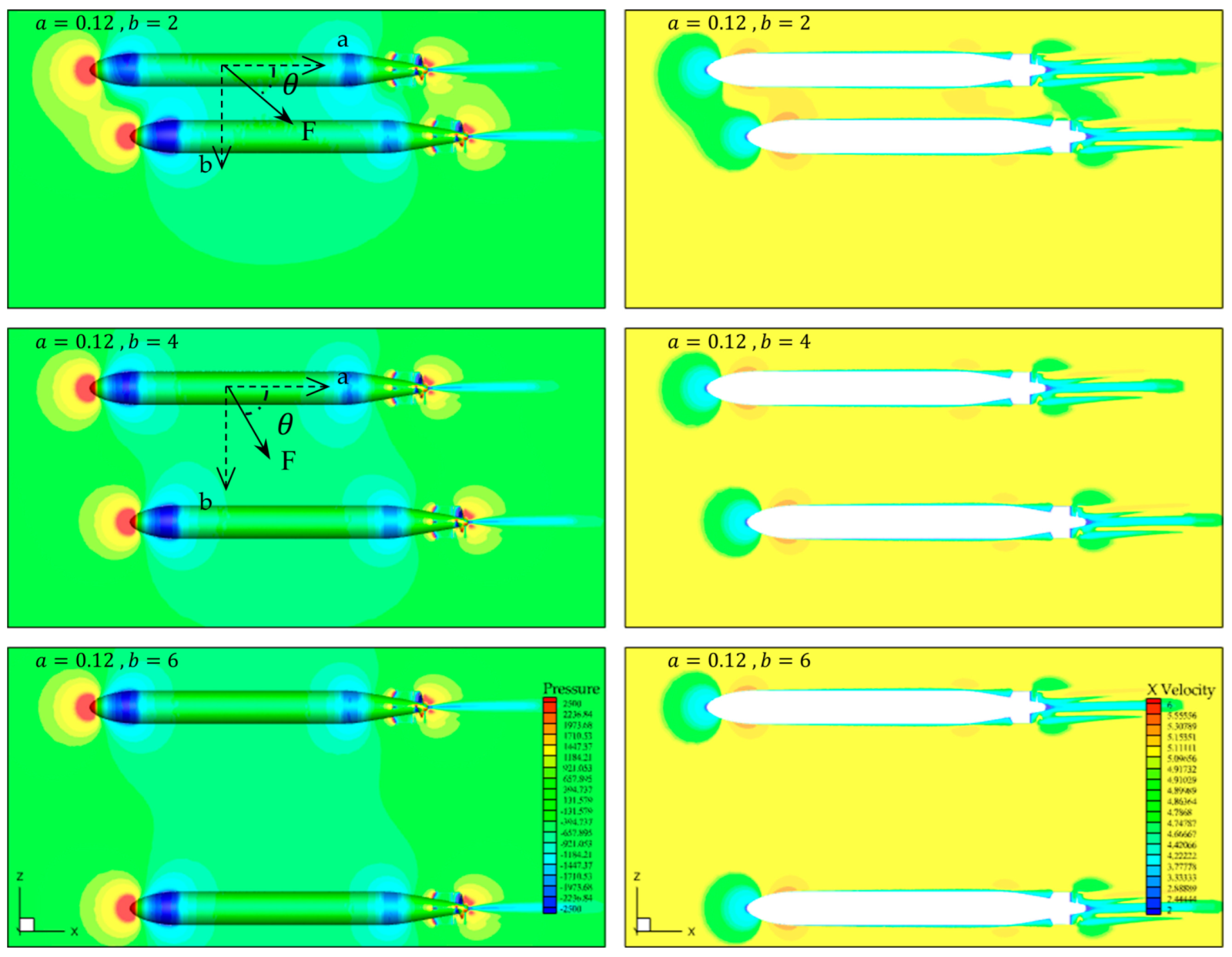
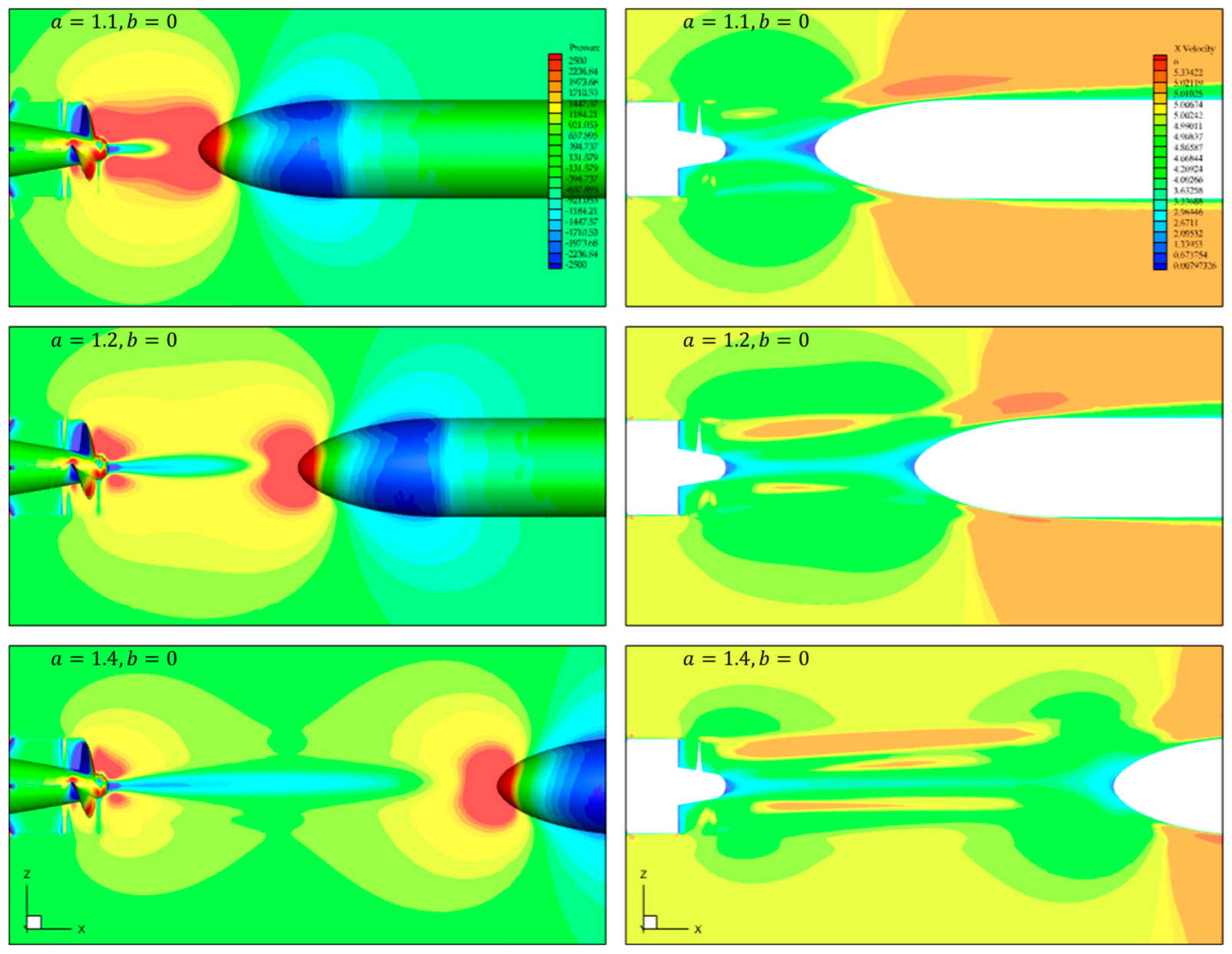
- In the pull region, the high-pressure areas at the head and tail of the formation are gradually separated as the “a” value increases; meanwhile, the direction of the force between UUVs is gradually biased towards the “a” direction, and the force between UUVs is weakened. The of the leading UUV shows an approximate increasing and then decreasing trend in the “a” direction, while the corresponding of the following UUV shows an approximate decreasing and then increasing trend. Along the “b” direction, as the distance increases, the high-pressure zones at the head and tail of the formation and the low-pressure zones in the parallel profile are gradually separated, while the direction of the force between the UUVs is gradually biased toward the “b” direction, and, thus, the force between the UUVs is weakened. The leading UUV experiences a steady decrease in , while the corresponding of the following vehicles continues to rise. In the push region, the high-pressure areas at the rear of the leading UUV and the front of the following UUV separate slowly as the distance between the “a” and “b” directions increases, leading to a progressive reduction in the force between the UUVs. The values of the leading UUV in both “a” and “b” directions show a tendency to gradually increase, while the corresponding values of the following UUV gradually decrease.
- In vehicle formations, a positive static thrust area is present when two vehicles are arranged in a staggered position. As the relative distance increases, the static thrust value declines.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| UUVs: | Unmanned underwater vehicles |
| CFD: | Computation fluid dynamics |
| : | Maximum diameter of the UUV |
| : | Length of the UUV |
| : | Position of the follower UUV |
| : | Normalized position of the follower UUV |
| : | Pressure coefficients |
| Y+: | y-plus value |
| : | Reynolds number of UUV |
| : | Rotational speeds of propeller |
| : | Drag acting on the UUV with the propeller removed |
| : | Thrust generated by the propeller |
| : | Convergence factor |
| : | Drag coefficient of the Single UUV |
| : | Drag coefficient of the leader UUV |
| : | Drag coefficient of the follower UUV |
| : | Drag ratio of the follower UUV |
| : | Drag ratio of the leader UUV |
| : | Drag of the fleet |
References
- Liu, X.; Hu, Y.; Mao, Z.; Tian, W. Numerical Simulation of the Hydrodynamic Performance and Self-Propulsion of a UUV near the Seabed. Appl. Sci. 2022, 12, 6975. [Google Scholar] [CrossRef]
- Cao, X.; Guo, L. A leader-follower formation control approach for target hunting by multiple Autonomous Underwater Vehicles in Three-Dimensional Underwater Environments. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419870664. [Google Scholar] [CrossRef]
- Zhao, P.; Li, J.; Mao, Z.; Ding, W. Cooperative Search Path Planning for Multiple Unmanned Surface Vehicles. In Proceedings of the 2022 International Conference on Autonomous Unmanned Systems (ICAUS 2022); Springer Nature: Singapore, 2023; pp. 3434–3445. [Google Scholar]
- Zhang, L.C.; Xu, S.F.; Liu, M.Y.; Xu, D.M. Progress in cooperative navigation and localization of multiple unmanned underwater vehicles (UUVs). High-Tech Commun. 2016, 26, 475–482. [Google Scholar]
- Xie, Q.L.; Song, L.; Lu, H.; Zhou, B.C.H. Synthesis of research on cooperative navigation techniques. Aero Weapon. 2019, 26, 23–30. [Google Scholar]
- Wang, Y.T.; Yan, W.S. Consensus formation tracking control of multiple autonomous underwater vehicle systems. Control. Theory Appl. 2013, 30, 379–384. [Google Scholar]
- Zeng, B.; Zhang, H.Q.; Li, H.P. Research on anti-submarine strategy for unmanned undersea vehicles. Syst. Eng. Electron. 2022, 44, 3174–3181. [Google Scholar]
- Xie, W.; Tao, H.; Gong, J.B.; Luo, W.; Yin, F.; Liang, X. Research advances in the development status and key technology of unmanned marine vehicle swarm operation. Chin. J. Ship Res. 2021, 16, 7–17, 31. [Google Scholar] [CrossRef]
- Jagadeesh, P.; Murali, K.; Idichandy, V.G. Experimental Investigation of Hydrodynamic Force Coefficients over AUV Hull Form. Ocean. Eng. 2009, 36, 113–118. [Google Scholar] [CrossRef]
- Guo, C.Y.; Zhao, Q.X.; Zhao, D.G. Data Processing Method of Self-propulsion Test of Ship Based on CFD. Ship Ocean. Eng. 2013, 42, 17–20. [Google Scholar]
- Vali, A.; Saranjam, B.; Kamali, R. Experimental and Numerical Study of a Submarine and Propeller Behaviors in Submergence and Surface Conditions. JAFM 2018, 11, 1297–1308. [Google Scholar] [CrossRef]
- Zhang, R.; Dong, X.; Wang, Z.; Huang, Y.; Yu, J. Numerical Design and Validation of Propeller for Long-range AUV. China Shipbuild. 2019, 60, 141–153. [Google Scholar]
- Posa, A.; Broglia, R.; Felli, M.; Falchi, M.; Balaras, E. Characterization of the Wake of a Submarine Propeller via Large-Eddy Simulation. Comput. Fluids 2019, 184, 138–152. [Google Scholar] [CrossRef]
- Wang, L.; Martin, J.E.; Felli, M.; Carrica, P.M. Experiments and CFD for the Propeller Wake of a Generic Submarine Operating near the Surface. Ocean. Eng. 2020, 206, 107304. [Google Scholar] [CrossRef]
- Carrica, P.M.; Kim, Y.; Martin, J.E. Near-Surface Self Propulsion of a Generic Submarine in Calm Water and Waves. Ocean. Eng. 2019, 183, 87–105. [Google Scholar] [CrossRef]
- Luo, W.; Jiang, D.; Wu, T.; Liu, M.; Li, Y. Numerical Simulation of the Hydrodynamic Characteristics of Unmanned Underwater Vehicles near Ice Surface. Ocean. Eng. 2022, 253, 111304. [Google Scholar] [CrossRef]
- Yang, G. Asymptotic Tracking with Novel Integral Robust Schemes for Mismatched Uncertain Nonlinear Systems. Intl. J. Robust Nonlinear 2023, 33, 1988–2002. [Google Scholar] [CrossRef]
- Shi, K.; Wang, X.H.; Xu, H.-X.; Guo, C.-L.; Chen, H. Model-free parameter adaptive sliding mode control for autonomous underwater helicopters. Ship Sci. Technol. 2022, 44, 73–79. [Google Scholar]
- Li, H.; An, X.; Feng, R.; Chen, Y. Motion Control of Autonomous Underwater Helicopter Based on Linear Active Disturbance Rejection Control with Tracking Differentiator. Appl. Sci. 2023, 13, 3836. [Google Scholar] [CrossRef]
- Du, P.; Yang, W.; Wang, Y.; Hu, R.; Chen, Y.; Huang, S.H. A Novel Adaptive Backstepping Sliding Mode Control for a Lightweight Autonomous Underwater Vehicle with Input Saturation. Ocean. Eng. 2022, 263, 112362. [Google Scholar] [CrossRef]
- Molland, A.F.; Utama, I.K.A.P. Experimental and Numerical Investigations into the Drag Characteristics of a Pair of Ellipsoids in Close Proximity. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2002, 216, 107–115. [Google Scholar] [CrossRef]
- Tian, W.; Mao, Z.; Zhao, F.; Zhao, Z. Layout Optimization of Two Autonomous Underwater Vehicles for Drag Reduction with a Combined CFD and Neural Network Method. Complexity 2017, 2017, 5769794. [Google Scholar] [CrossRef]
- Joung, T.-H.; Sammut, K.; He, F.; Lee, S.-K. Shape Optimization of an Autonomous Underwater Vehicle with a Ducted Propeller Using Computational Fluid Dynamics Analysis. Int. J. Nav. Archit. Ocean. Eng. 2012, 4, 44–56. [Google Scholar] [CrossRef]
- Huang, T.; Liu, H.L. Measurements of Flows over an Axisymmetric Body with Various Appendages in a Wind Tunnel: The DARPA SUBOFF Experimental Program; British Maritime Technology: London, UK, 1994. [Google Scholar]
- Jiménez, J.M.; Hultmark, M.; Smits, A.J. The Intermediate Wake of a Body of Revolution at High Reynolds Numbers. J. Fluid Mech. 2010, 659, 516–539. [Google Scholar] [CrossRef]
- Jessup, S.D.; Boswell, R.J.; Nelka, J.J. Experimental Unsteady and Time Average Loads on the Blades of the Cp Propeller on a Model of the Dd-963 Class Destroyer for Simulated Modes of Operation; David W. Taylor Naval Ship Research and Development Center: Bethesda, MD, USA, 1977. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 0.2 m | 0.5 m | ||
| 2 m | 20° | ||
| 0.3 m | Variable | ||
| 1.2 m | Variable |
| DTMB 4119 Model Propeller | |
|---|---|
| D (m) | 0.1829 |
| Z | 3 |
| Skew (o) | 0 |
| Rake (o) | 0 |
| Blade section | NACA66 a = 0.8 |
| Rotation direction | Right |
| Scaling | 0.6 |
| Dimensionless Parameters | Description | Range of Values |
|---|---|---|
| Horizontal relative distance | (0, 0.03, 0.06, 0.12, 0.2, 0.4, 0.6, 0.8, 1, 1.1, 1.2, 1.4, 1.6, 1.8, 2, 2.4) | |
| b | Vertical relative distance | (0, 0.2, 0.6, 1, 1.5, 2, 3, 4, 5, 6) |
| Mesh | ||
|---|---|---|
| Coarse | 0.0045 | 0.005 |
| Medium | 0.0034 | 0.0036 |
| Fine | 0.0033 | 0.0034 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Hu, Y.; Mao, Z.; Ding, W.; Han, S. Numerical Investigation on Interactive Hydrodynamic Performance of Two Adjacent Unmanned Underwater Vehicles (UUVs). J. Mar. Sci. Eng. 2023, 11, 2088. https://doi.org/10.3390/jmse11112088
Liu X, Hu Y, Mao Z, Ding W, Han S. Numerical Investigation on Interactive Hydrodynamic Performance of Two Adjacent Unmanned Underwater Vehicles (UUVs). Journal of Marine Science and Engineering. 2023; 11(11):2088. https://doi.org/10.3390/jmse11112088
Chicago/Turabian StyleLiu, Xiaodong, Yuli Hu, Zhaoyong Mao, Wenjun Ding, and Shiyu Han. 2023. "Numerical Investigation on Interactive Hydrodynamic Performance of Two Adjacent Unmanned Underwater Vehicles (UUVs)" Journal of Marine Science and Engineering 11, no. 11: 2088. https://doi.org/10.3390/jmse11112088
APA StyleLiu, X., Hu, Y., Mao, Z., Ding, W., & Han, S. (2023). Numerical Investigation on Interactive Hydrodynamic Performance of Two Adjacent Unmanned Underwater Vehicles (UUVs). Journal of Marine Science and Engineering, 11(11), 2088. https://doi.org/10.3390/jmse11112088