

Simulation of Handling Operations in Marine Container Terminals for the Purposes of a Profession Simulator




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Concept of Profession Simulators
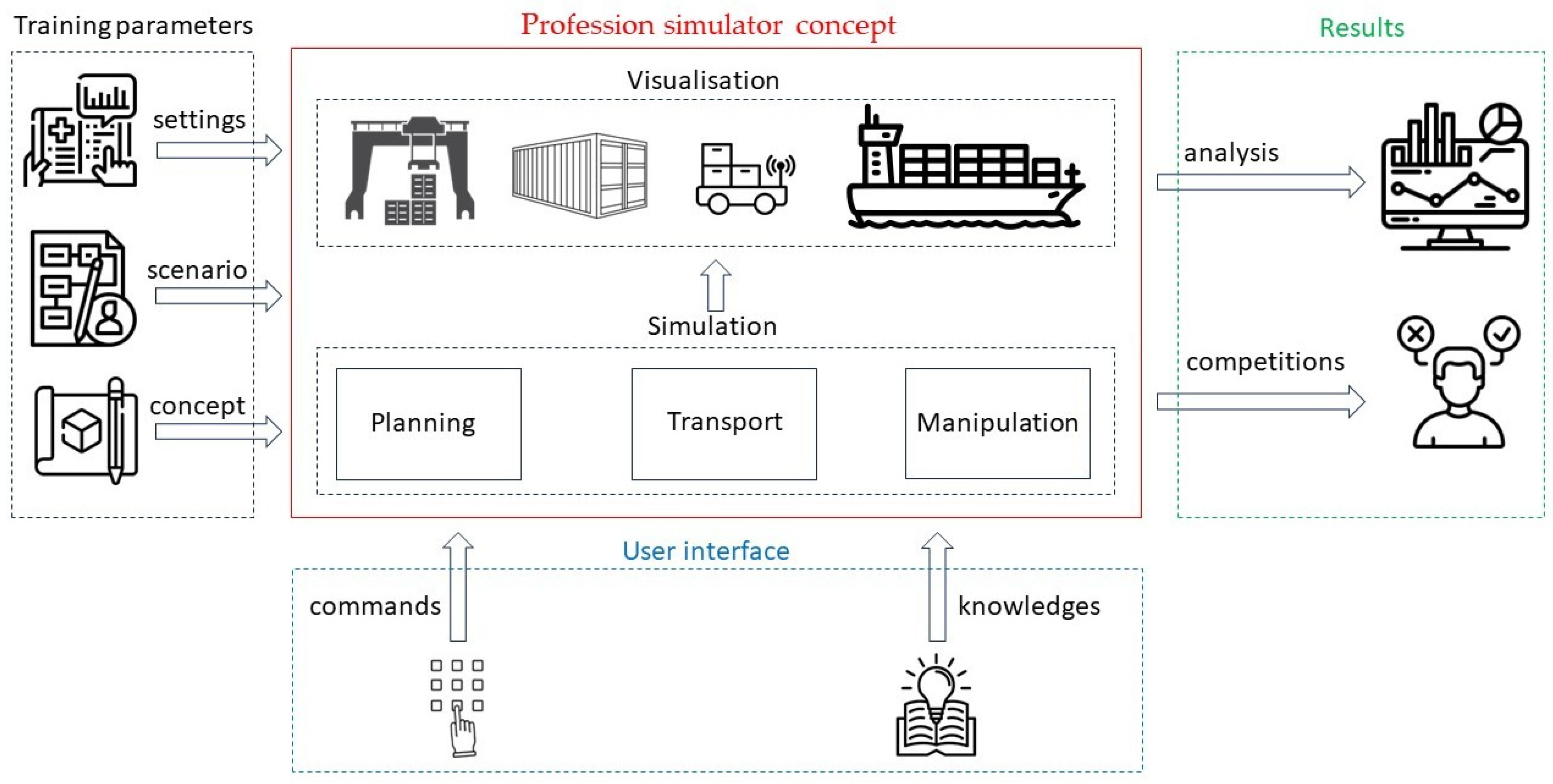
2.1. Profession Simulators
- maci—The yard machine, container i is scheduled to be transferred.
- traveli—The time required to transport container i between the storage area, marshaling area, track area, and/or intermodal terminal.
- setupi—The time required to move the container(s) stored above the next scheduled container.
- xi—The row of the storage area partition where container i is stored.
- yi—The column of the storage area partition where container i is stored.
- zi,t—The vertical storage position of container i stored at time ti; this is measured as the number of containers stored on container i, which delays access by the handling equipment.
- ti—Time at which container i is scheduled for handling (movement).
- arriveS—Arrival time of ship s.
- traveling timei—The time required to transport container i between the storage area, marshaling area, track area, and/or intermodal terminal.
- set-up timei—The time required to move the container(s) stored above the next scheduled container.
3. Applications
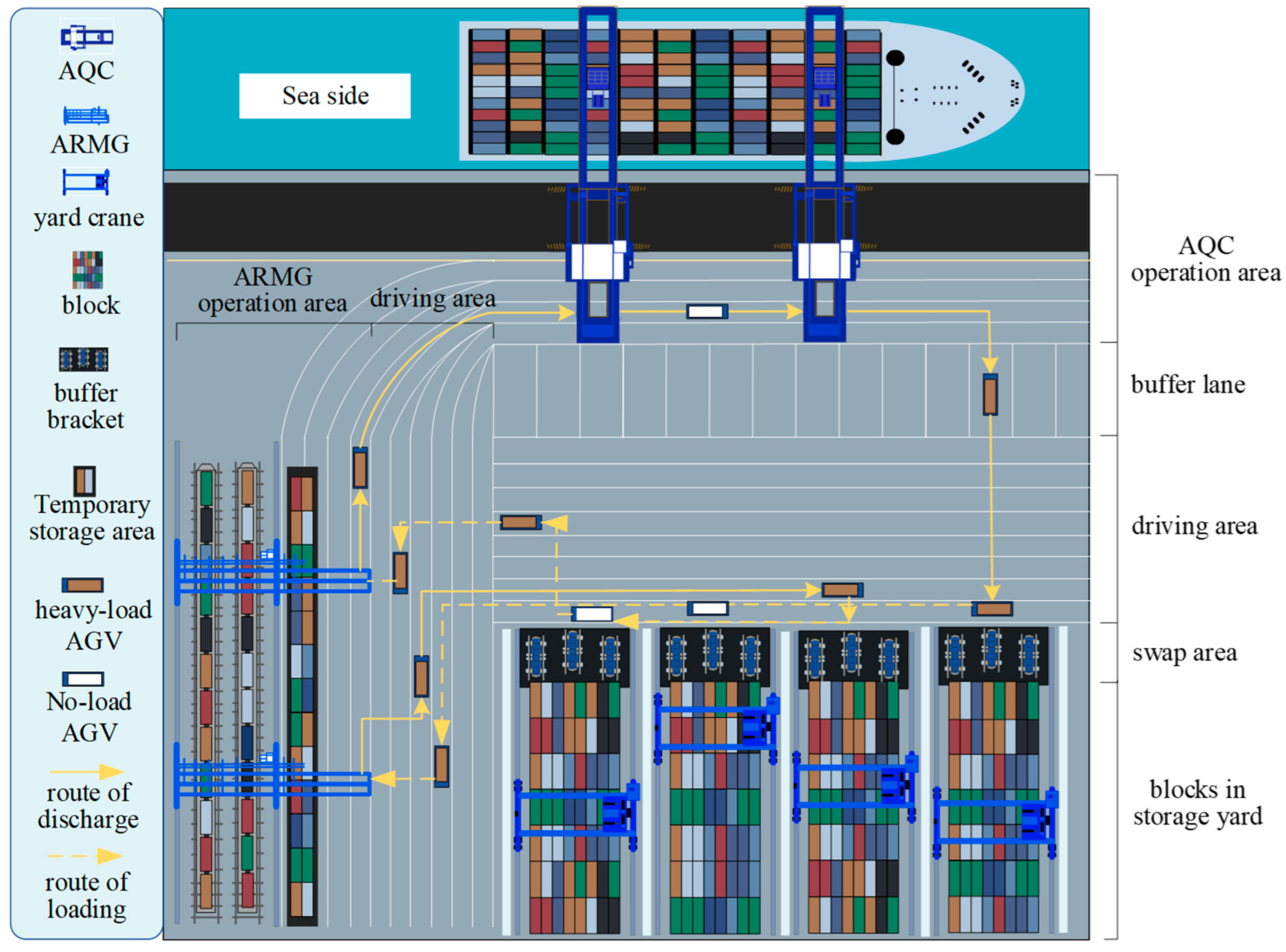
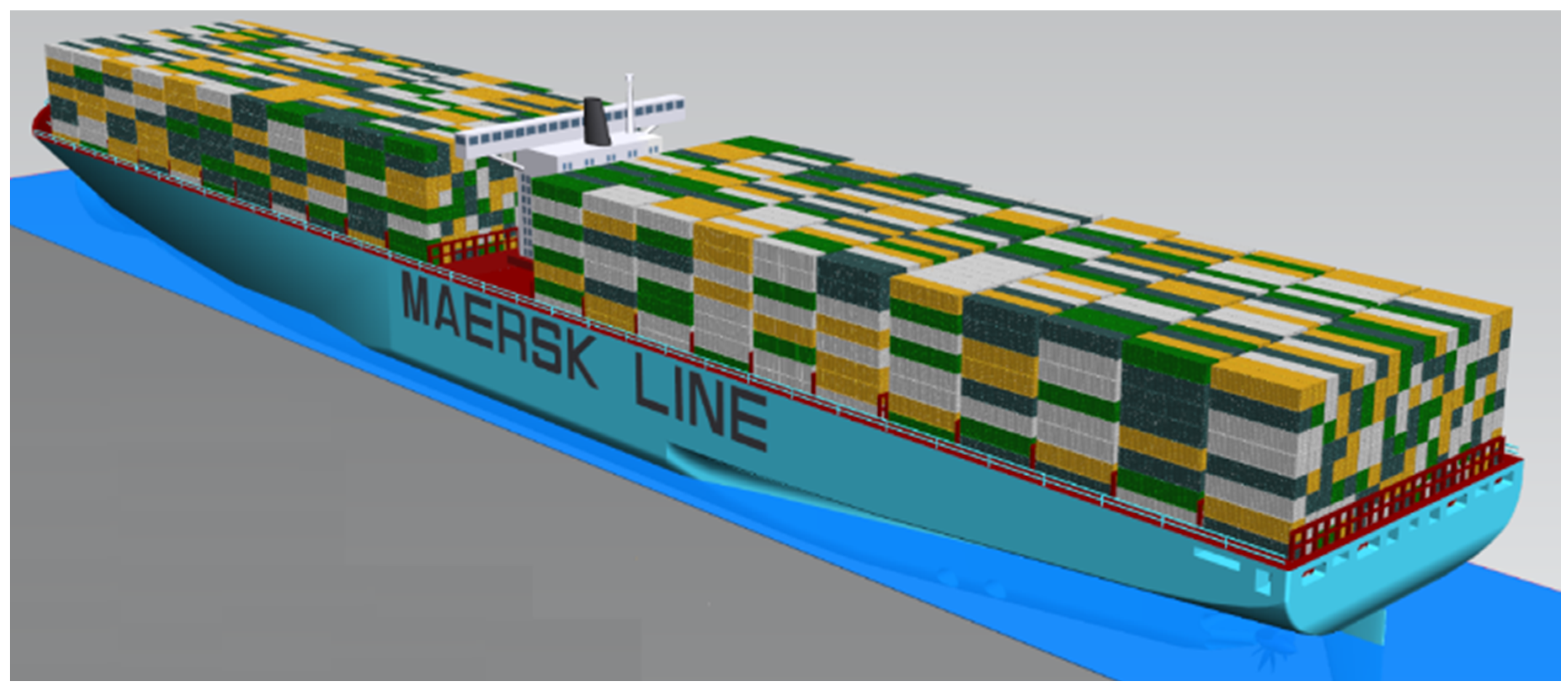
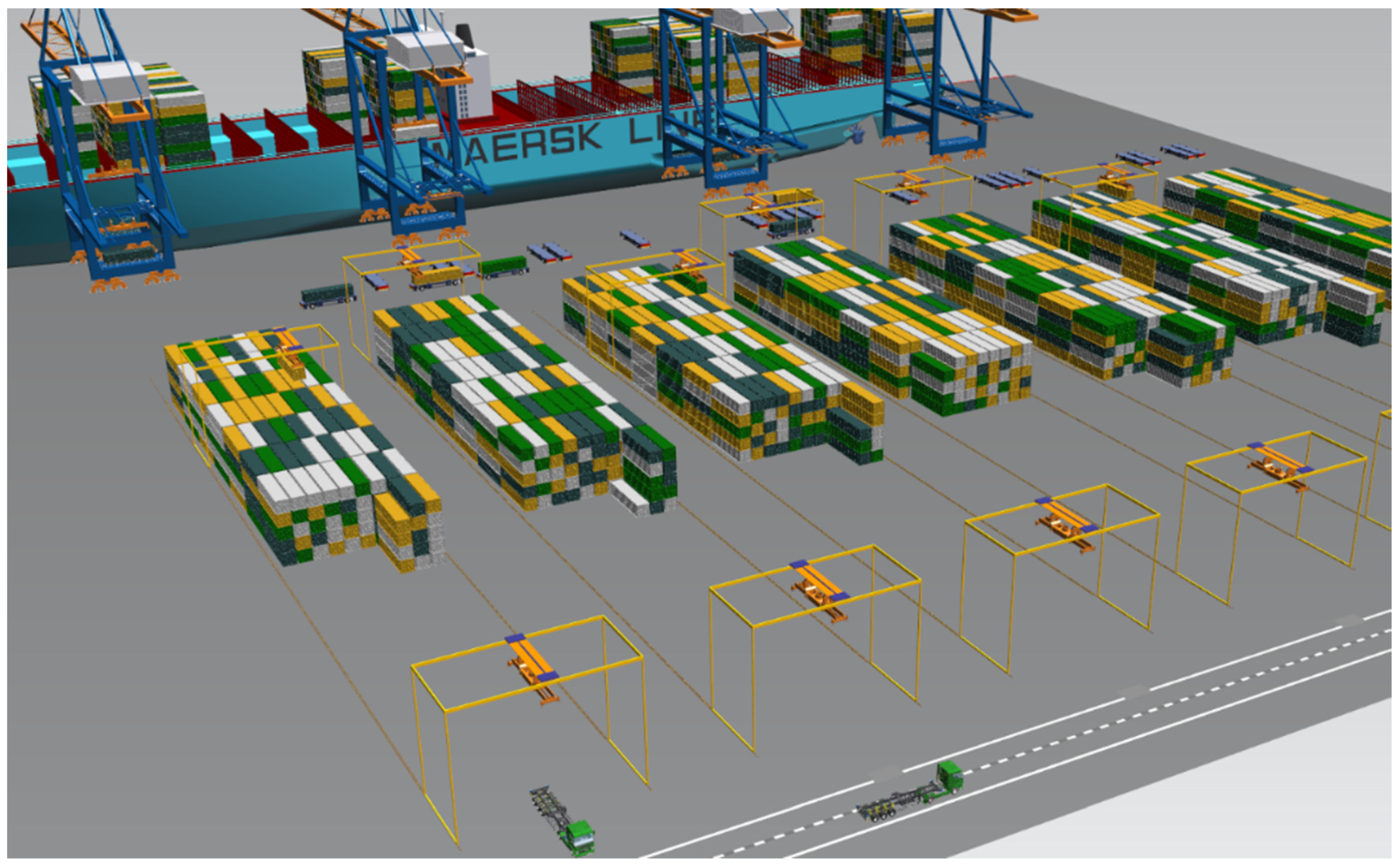
3.1. Marine Container Terminal
3.2. Handling Devices in Container Terminals
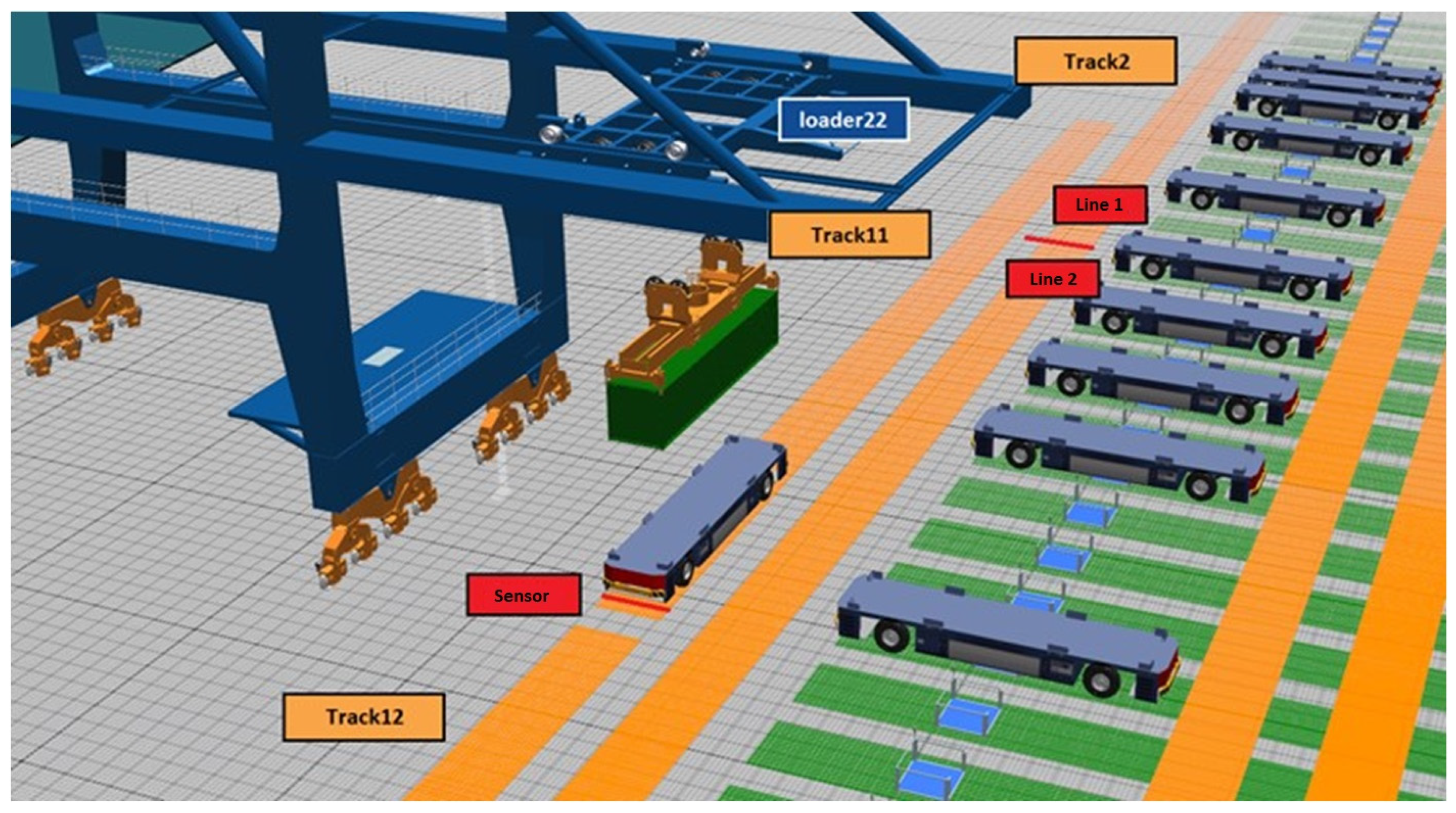
3.3. Automatically Driven Vehicles
4. Simulation Model and Results
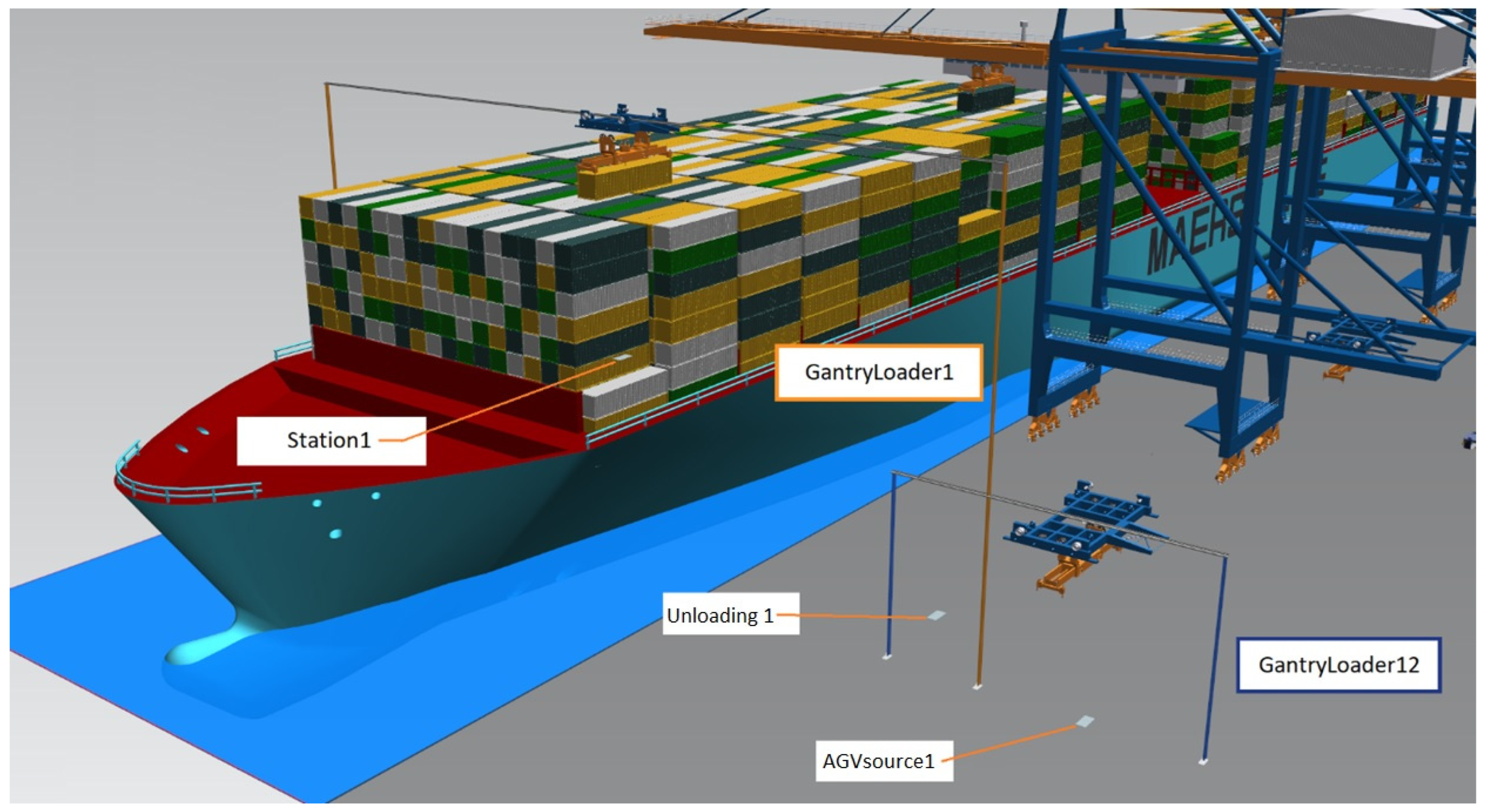
4.1. Concept of the Simulation Model within the Profession Simulator
4.2. Parameters of the Simulation Model
4.3. Management of Processes within the Simulation Model
4.4. Use of the Profession Simulator
- -
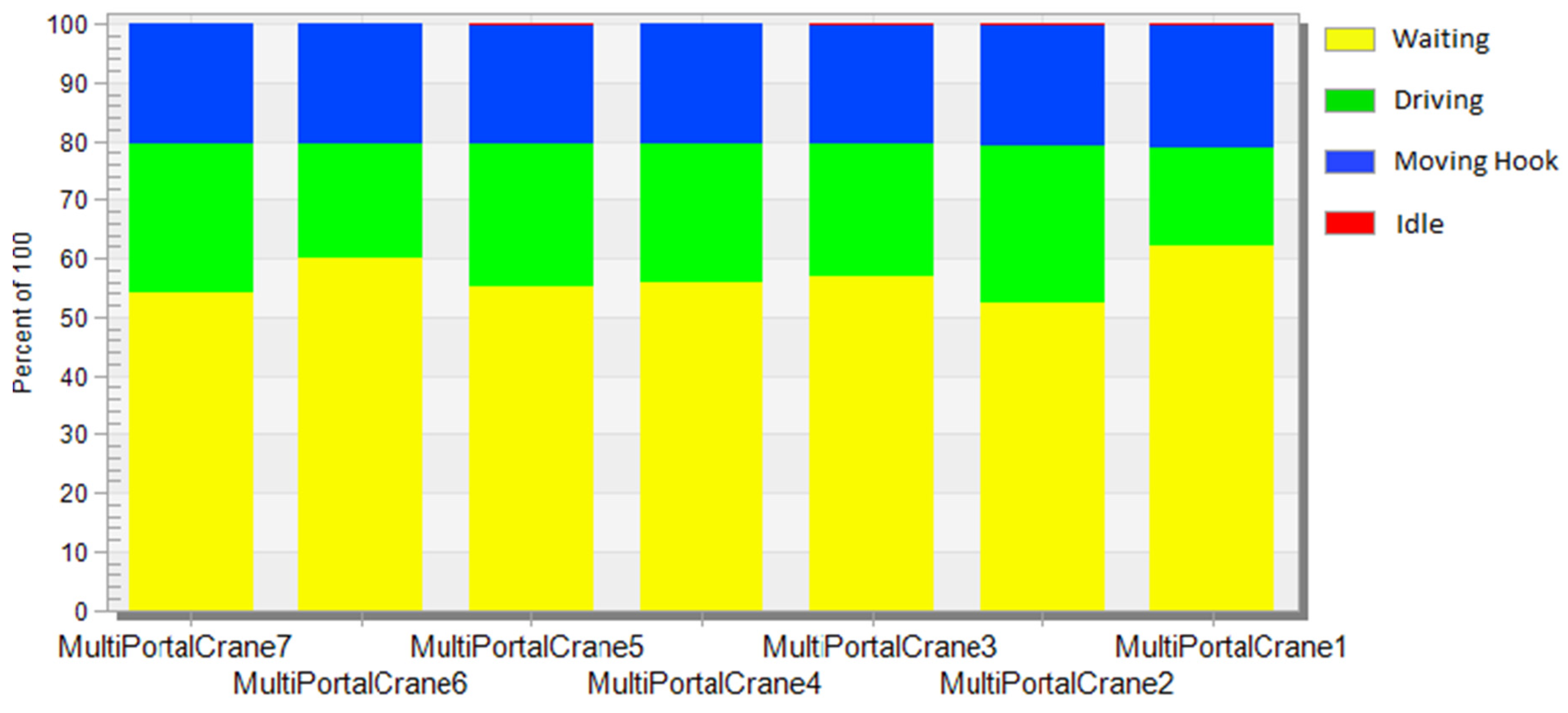
- Use of quay cranes (percentage of working conditions of quay cranes) (Figure 11);
- -
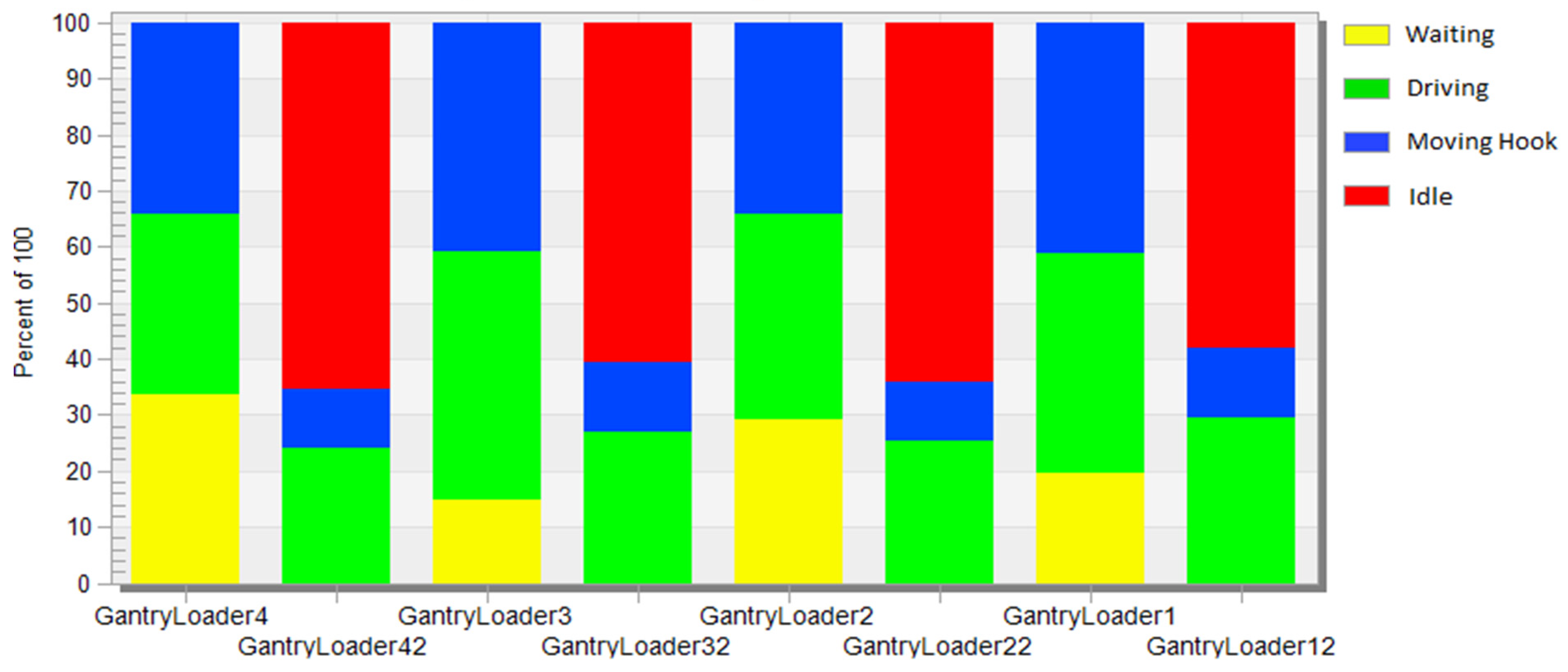
- Use of gantry cranes (percentage of working conditions of gantry cranes) (Figure 12);
- -
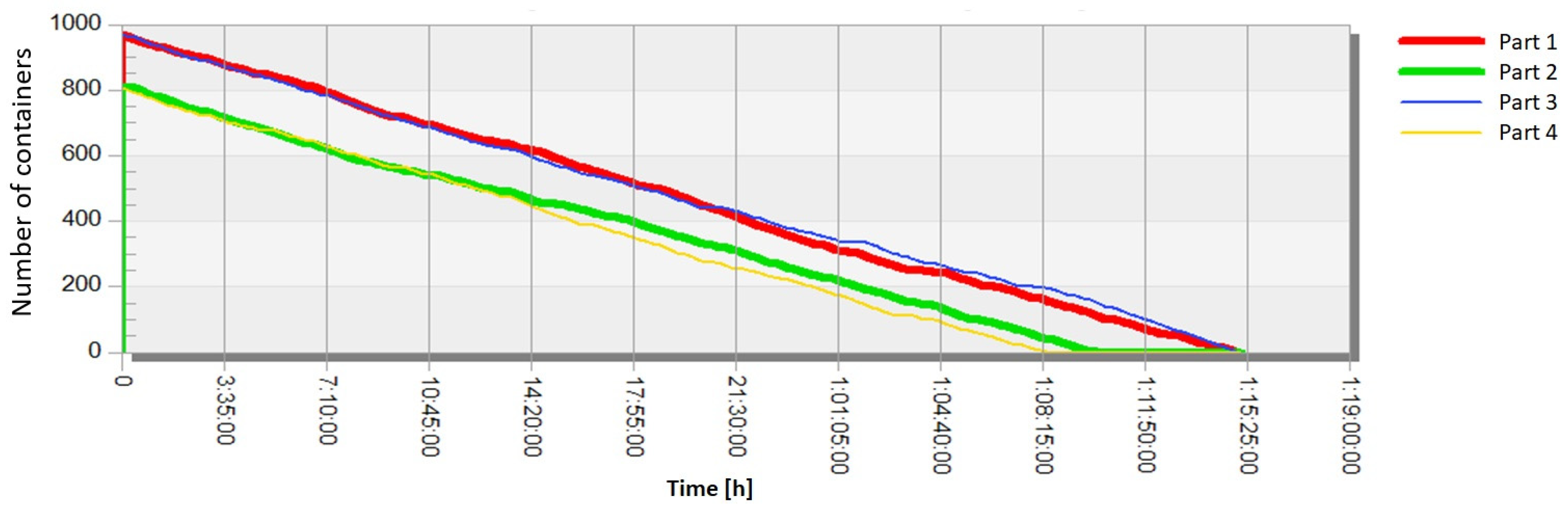
- Time flow of the container numbers on the parts of the loading area of a cargo container ship (Figure 11);
- -
- Occupancy of the parts of parking lots by empty AGVs (Figure 13);
- -
- Occupancy of the transshipment point of AGVs before blocks of the storage area (Figure 14);
- -
- Occupancy of the transshipment point of road vehicles before blocks of storage area;
- -
- Use of the second lane for AGVs (percentage of a certain number of vehicles on the specific lane) (Figure 15);
- -
- The actual loading time of AGVs;
- -
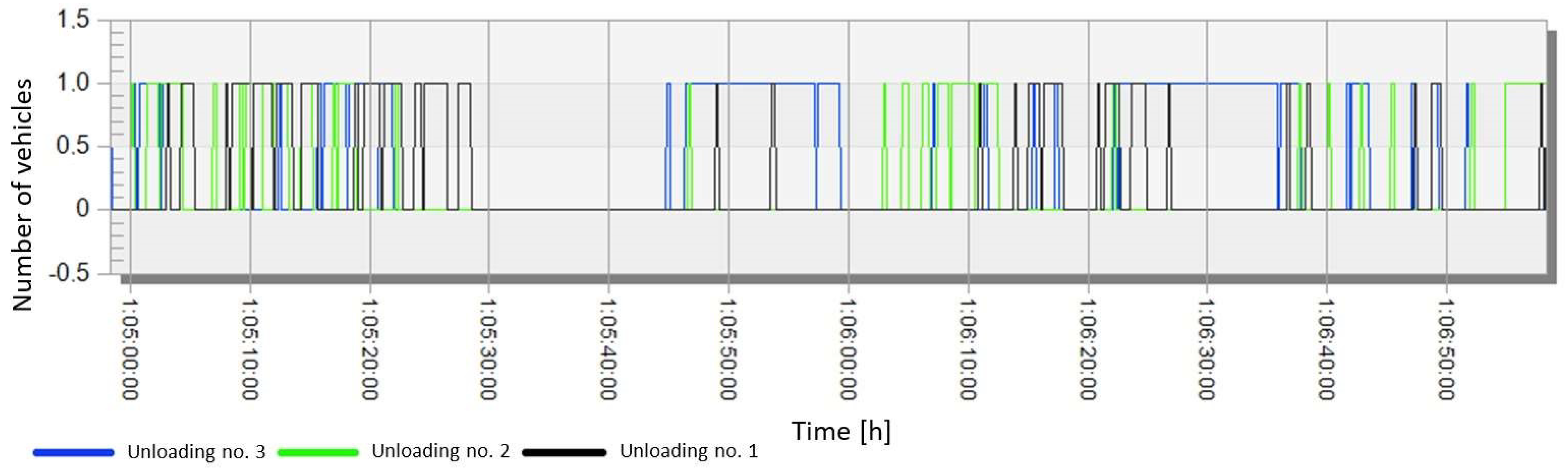
- Total unloading time of the cargo container ship (Figure 16).
4.5. The Accuracy of a Profession Simulator
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Parola, F.; Sciomachen, A. Modal split evaluation of a maritime container terminal. Marit. Econ. Logist. 2009, 11, 77–97. [Google Scholar] [CrossRef]
- de Haas, J. Gard Guidance on Freight Containers; Gard AS: Arendal, Norway, 2016; ISBN 978-82-90344-35-6. [Google Scholar]
- Agershou, H. Planning and Design of Ports and Marine Terminals, 2nd ed.; ICE Publishing: London, UK, 2004. [Google Scholar]
- Meisel, F. Seaside Operations Planning in Container Terminals; Physica: Heidelberg, Germany, 2009; ISBN 978-3-7908-2586-2. [Google Scholar]
- Gancheva, Y. Some Problems Related To The Exploitation Of Automated Container Terminals. Pedagog.-Pedagog. 2021, 93, 122–131. [Google Scholar] [CrossRef]
- Ottjes, J.A.; Hengst, S.; Tutuarima, W.H. A simulation model of a sailing container terminal service in the Port of Rotterdam. In Proceedings of the European Conference on Modelling and Simulation ESM-94, Barcelona, Spain, 1–3 June 1994; pp. 876–880. [Google Scholar]
- Ambrosino, D.; Tanfani, E. A Discrete Event Simulation Model For The Analysis of Critical Factors in the Expansion Plan of A Marine Container Terminal. In Proceedings of the 23rd European Conference on Modelling and Simulation, Madrid, Spain, 9–12 June 2009; Otamendi, J., Bargiela, A., Montes, J.L., Pedrera, L., Eds.; European Council Modelling & Simulation: Nottingham, UK, 2009; pp. 288–294. [Google Scholar]
- Lee, T.-W.; Park, N.-K.; Lee, D.-W. A simulation study for the logistics planning of a container terminal in view of SCM. Marit. Policy Manag. 2003, 30, 243–254. [Google Scholar] [CrossRef]
- Nam, K.C.; Kwak, K.S.; Yu, M.S. Simulation study of Container Terminal performance. J. Waterw. Port Coast. Ocean Eng. 2002, 128, 126–132. [Google Scholar] [CrossRef]
- Maione, G. Discrete-event simulation of a complex intermodal container terminal—A case-study of standard unloading/loading processes of vessel ships. In Proceedings of the ICINCO 2008, the Fifth International Conference on Informatics in Control, Automation and Robotics, Vol Spsmc: Signal Processing, Systems Modeling and Control, Funchal-Madeira, Funchal, Portugal, 11–15 May 2008; Filipe, J., Cetto, J.A., Ferrier, J., Eds.; Insticc-Inst Syst Technologies Information Control & Communication: Setubal, Portugal, 2008; pp. 171–176. [Google Scholar]
- Gronalt, M.; Haeuslmayer, H.; Posset, M.; Rojas-Navas, S. SIMCONT—Theory And Practice in Simulation of Binnenland Container Terminals. In Proceedings of the 13rd International Conference on Harbor, Maritime & Multimodal Logistics Modeling and Simulation (HMS 2011), Roma, Italy, 12–14 September 2011; Bruzzone, A., Longo, F., Merkuryev, Y., Piera, M., Eds.; Diptem University Genoa: Genoa, Italy, 2011; pp. 155–160. [Google Scholar]
- Briskorn, D.; Hartmann, S. Simulating Dispatching Strategies for Automated Container Terminals. In Proceedings of the Operations Research Proceedings; Springer: Berlin/Heidelberg, Germany, 2006; pp. 97–102. [Google Scholar]
- Zhou, P.; Guo, Z.; Song, X. Simulation study on container terminal performance. In Proceedings of the 2006 International Conference on Management Science & Engineering (13th); Lille, France, 6–7 October 2006, Lan, H., Ed.; Harbin Institute Technology Publishers: Harbin, China, 2006; Volume 1–3, pp. 177–182. [Google Scholar]
- Liu, C.I.; Jula, H.; Ioannou, P.A. Design, Simulation, and Evaluation of Automated Container Terminals. IEEE Trans. Intell. Transp. Syst. 2002, 3, 12–26. [Google Scholar] [CrossRef]
- Kulak, O.; Polat, O.; Gujjula, R.; Guenther, H.-O. Strategies for improving a long-established terminal’s performance: A simulation study of a Turkish container terminal. Flex. Serv. Manuf. J. 2013, 25, 503–527. [Google Scholar] [CrossRef]
- Nawawi, M.K.M.; Jamil, F.C.; Hamzah, F.M. Evaluating Performance of Container Terminal Operation Using Simulation. In Proceedings of the International Conference on Mathematics, Engineering and Industrial Applications 2014 (ICOMEIA 2014), Penang, Malaysia, 20–28 May 2014; Ramli, M.F., Junoh, A.K., Roslan, N., Masnan, M.J., Kharuddin, M., Eds.; Amer Inst Physics: Melville, NY, USA, 2015; Volume 1660. [Google Scholar]
- Cho, G.-S.; Hwang, H.-S.; Bae, S.-T. A study on an evaluation model for solving container terminal performance problem by simulation method. In Proceedings of the Sixth International Conference on Information and Management Sciences, Lhasa, China, 1–6 July 2007; Lee, T.S., Liu, Y., Zhao, X., Eds.; California Polytechnic State University: San Luis Obispo, CA, USA, 2007; Volume 6, pp. 445–450. [Google Scholar]
- Canonaco, P.; Legato, P.; Mazza, R.M. An integrated simulation model for channel contention and berth management at a maritime container terminal. In Proceedings of the 21st European Conference on Modelling and Simulation Ecms 2007: Simulations in United Europe, Prague, Czech Republic, 4–6 June 2007; Zelinka, I., Oplatkova, Z., Orsoni, A., Eds.; European Council Modelling & Simulation: Nottingham, UK, 2007; p. 353. [Google Scholar]
- Cimpeanu, R.; Devine, M.T.; O’Brien, C. A simulation model for the management and expansion of extended port terminal operations. Transp. Res. Part E-Logist. Transp. Rev. 2017, 98, 105–131. [Google Scholar] [CrossRef]
- Maruri, L.; Nunez, L.; Vidarte, A.; Ezquerra, J.M.; Martinez, A. Smulation of a container transport system between port and inland terminal depots. In Proceedings of the 1st International Industrial Simulation Conference 2003, Valencia, Spain, 9–11 June 2003; Guerri, J.C., Pajares, A., Palau, C., Eds.; EUROSIS: Ghent, Belgium, 2003; pp. 238–242. [Google Scholar]
- Wang, N.; Chang, D.; Shi, X.; Yuan, J.; Gao, Y. Analysis and Design of Typical Automated Container Terminals Layout Considering Carbon Emissions. Sustainability 2019, 11, 2957. [Google Scholar] [CrossRef]
- Maione, G.; Mangini, A.M.; Ottomanelli, M. A Generalized Stochastic Petri Net Approach for Modeling Activities of Human Operators in Intermodal Container Terminals. IEEE Trans. Autom. Sci. Eng. 2016, 13, 1504–1516. [Google Scholar] [CrossRef]
- Grunow, M.; Gunther, H.O.; Ehren, A.; Lehmann, M. Simulation analysis of AGV system performance in container port terminals. In Proceedings of the 2nd International Industrial Simulation Conference 2004, Malaga, Spain, 7–9 June 2004; Marin, J., Koncar, V., Eds.; EUROSIS: Ghent, Belgium, 2004; pp. 304–308. [Google Scholar]
- Azab, A.; Karam, A.; Eltawil, A. A simulation-based optimization approach for external trucks appointment scheduling in container terminals. Int. J. Model. Simul. 2020, 40, 321–338. [Google Scholar] [CrossRef]
- Malyshev, N.V.; Korovyakovskiy, E.K. Robotic automation of logistics container terminals. Proc. Bull. Sci. Res. Results 2020, 63, 15–25. [Google Scholar] [CrossRef]
- Kon, W.K.; Abdul Rahman, N.S.F.; Md Hanafiah, R.; Abdul Hamid, S. The global trends of automated container terminal: A systematic literature review. Marit. Bus. Rev. 2020, 6, 206–233. [Google Scholar] [CrossRef]
- Kozan, E.; Preston, P. Mathematical modelling of container transfers and storage locations at seaport terminals. OR Spectr. 2006, 28, 519–537. [Google Scholar] [CrossRef]
- Arnone, M.; Mancini, S.; Rosa, A. Formulating a Mathematical Model for Container Assignment Optimization on an Intermodal Network. Procedia—Soc. Behav. Sci. 2014, 111, 1063–1072. [Google Scholar] [CrossRef]
- Moura, A.; Oliveira, J.; Pimentel, C. A Mathematical Model for the Container Stowage and Ship Routing Problem. J. Math. Model. Algorithms Oper. Res. 2013, 12, 217–231. [Google Scholar] [CrossRef]
- Steenken, D.; Voß, S.; Stahlbock, R. Container terminal operation and operations research—A classification and literature review. In Container Terminals and Automated Transport Systems; Günther, H.-O., Kim, K.H., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; pp. 3–49. ISBN 3540223282. [Google Scholar]
- Amrou M’Hand, M.; Badir, H.; Boulmakoul, A. Process Mining for port container terminals: The state of the art and issues. In Proceedings of the ASD 2018: Big Data & Applications 12th Edition of the Conference on Advances of Decisional Systems, Marrakech, Morocco, 2–3 May 2018. [Google Scholar]
- Du, D.; Liu, T.; Guo, C. Analysis of Container Terminal Handling System Based on Petri Net and ExtendSim. Promet-Traffic Transp. 2023, 35, 87–105. [Google Scholar] [CrossRef]
- Kurniawan, F.; Musa, S.N.; Moin, N.H.; Sahroni, T.R. A Systematic Review on Factors Influencing Container Terminal’s Performance. Oper. Supply Chain Manag. Int. J. 2022, 15, 174–192. [Google Scholar] [CrossRef]
- Hsu, H.-P.; Chou, C.-C.; Wang, C.-N. Heuristic/Metaheuristic-Based Simulation Optimization Approaches for Integrated Scheduling of Yard Crane, Yard Truck, and Quay Crane Considering Import and Export Containers. IEEE Access 2022, 10, 64650–64670. [Google Scholar] [CrossRef]
- Široký, J. Automatic Transshipment Systems for Container Transport in Terminals. Perners Contact 2011, 6, 145–154. [Google Scholar]
- media.licdn.com. Available online: https://media.licdn.com/dms/image/D4E12AQHw5zenhUTUvg/article-cover_image-shrink_600_2000/0/1680276788040?e=2147483647&v=beta&t=L5dxLUv17-fxjf30xA2m2wNIrz9ZqIcCJaWoJ_BypxI (accessed on 1 October 2023).
- PEMA Container Terminal Automation. Available online: https://www.pema.org/wp-content/uploads/downloads/2016/06/PEMA-IP12-Container-Terminal-Automation.pdf (accessed on 1 October 2023).
- Götting, H.H. Automation and Steering of Vehicles in Ports. Port Technol. Int. 2000, 10, 101–111. [Google Scholar]
- Duan, J.; Li, L.; Zhang, Q.; Qin, J.; Zhou, Y. Integrated Scheduling of Automatic Guided Vehicles and Automatic Stacking Cranes in Automated Container Terminals Considering Landside Buffer Zone. Transp. Res. Rec. 2023, 2677, 502–528. [Google Scholar] [CrossRef]
- Hsu, H.-P.; Tai, H.-H.; Wang, C.-N.; Chou, C.-C. Scheduling of collaborative operations of yard cranes and yard trucks for export containers using hybrid approaches. Adv. Eng. Inform. 2021, 48, 101292. [Google Scholar] [CrossRef]
- Naeem, D.; Gheith, M.; Eltawil, A. A comprehensive review and directions for future research on the integrated scheduling of quay cranes and automated guided vehicles and yard cranes in automated container terminals. Comput. Ind. Eng. 2023, 179, 109149. [Google Scholar] [CrossRef]
- Hamburger Hafen und Logistik AG. Case Study: Li-Ion Battery Automated Guided Vehicles; Hamburger Hafen und Logistik AG: Hamburg, Germany, 2018. [Google Scholar]
- Robinson, S. Conceptual modelling for simulation Part I: Definition and requirements. J. Oper. Res. Soc. 2008, 59, 278–290. [Google Scholar] [CrossRef]
- Robinson, S. Exploring the relationship between simulation model accuracy and complexity. J. Oper. Res. Soc. 2023, 74, 1992–2011. [Google Scholar] [CrossRef]
- Flexport. Available online: www.flexport.com/help/589-pick-up-container-from-destination/ (accessed on 1 October 2023).
- Statista. Available online: https://www.statista.com/statistics/1101596/port-turnaround-times-by-country/ (accessed on 1 October 2023).








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fedorko, G.; Molnár, V.; Mikušová, N.; Strohmandl, J.; Kižik, T. Simulation of Handling Operations in Marine Container Terminals for the Purposes of a Profession Simulator. J. Mar. Sci. Eng. 2023, 11, 2264. https://doi.org/10.3390/jmse11122264
Fedorko G, Molnár V, Mikušová N, Strohmandl J, Kižik T. Simulation of Handling Operations in Marine Container Terminals for the Purposes of a Profession Simulator. Journal of Marine Science and Engineering. 2023; 11(12):2264. https://doi.org/10.3390/jmse11122264
Chicago/Turabian StyleFedorko, Gabriel, Vieroslav Molnár, Nikoleta Mikušová, Jan Strohmandl, and Tomáš Kižik. 2023. "Simulation of Handling Operations in Marine Container Terminals for the Purposes of a Profession Simulator" Journal of Marine Science and Engineering 11, no. 12: 2264. https://doi.org/10.3390/jmse11122264
APA StyleFedorko, G., Molnár, V., Mikušová, N., Strohmandl, J., & Kižik, T. (2023). Simulation of Handling Operations in Marine Container Terminals for the Purposes of a Profession Simulator. Journal of Marine Science and Engineering, 11(12), 2264. https://doi.org/10.3390/jmse11122264