
Fatigue Assessment Comparison between a Ship Motion-Based Data-Driven Model and a Direct Fatigue Calculation Method






Abstract
:1. Introduction
2. Spectral and Fatigue Assessment for Ship Structure
2.1. Ship Fatigue and S-N Method
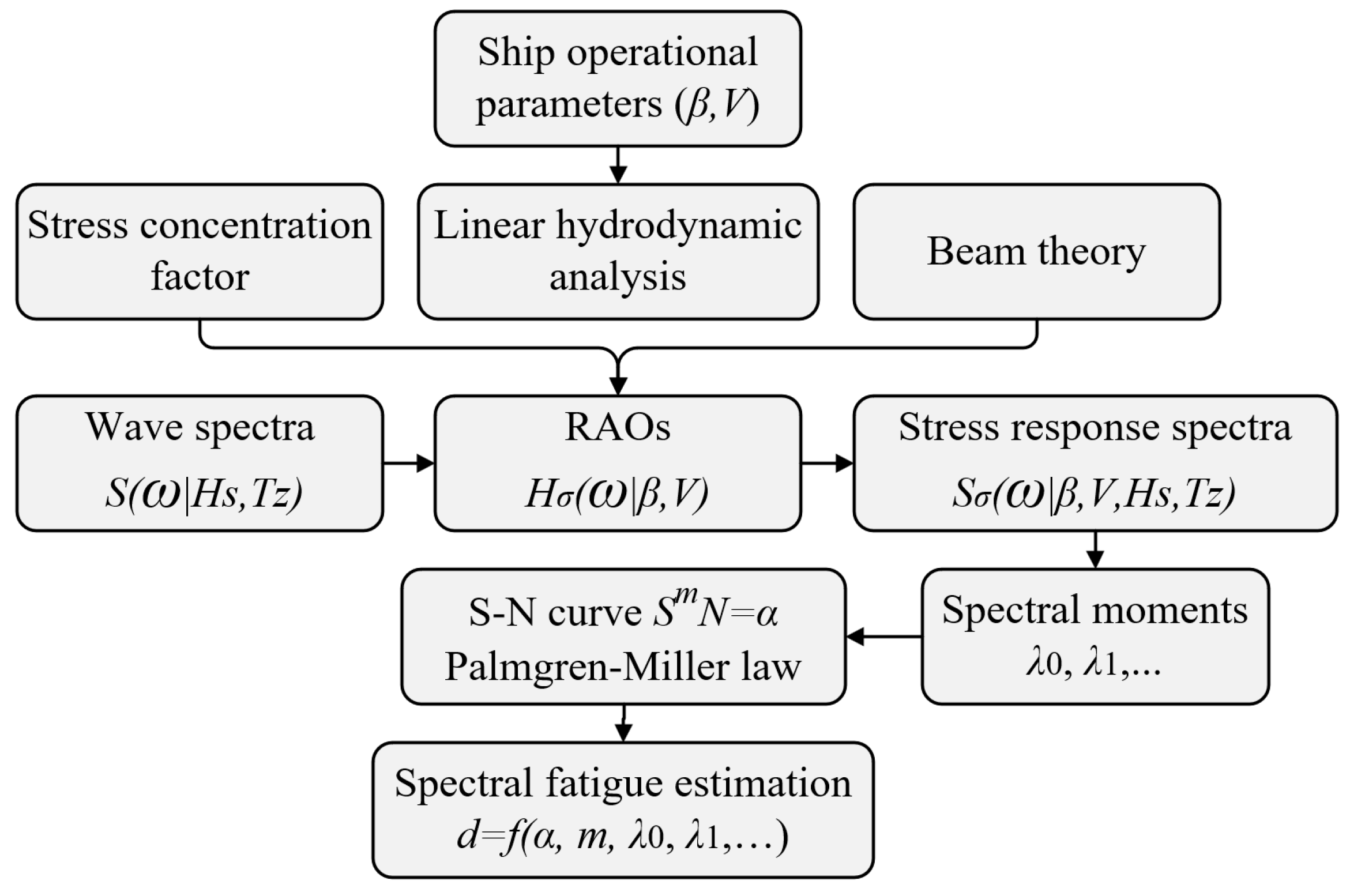
2.2. Direct Fatigue Estimation Using the Spectral Method
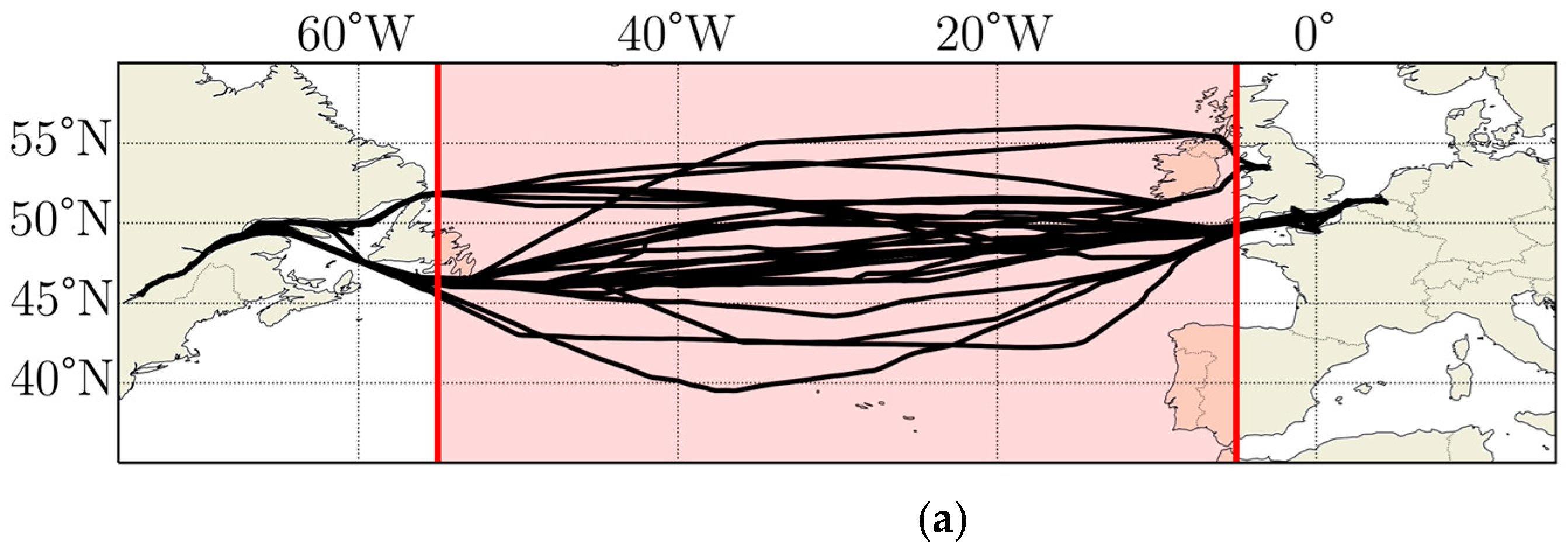
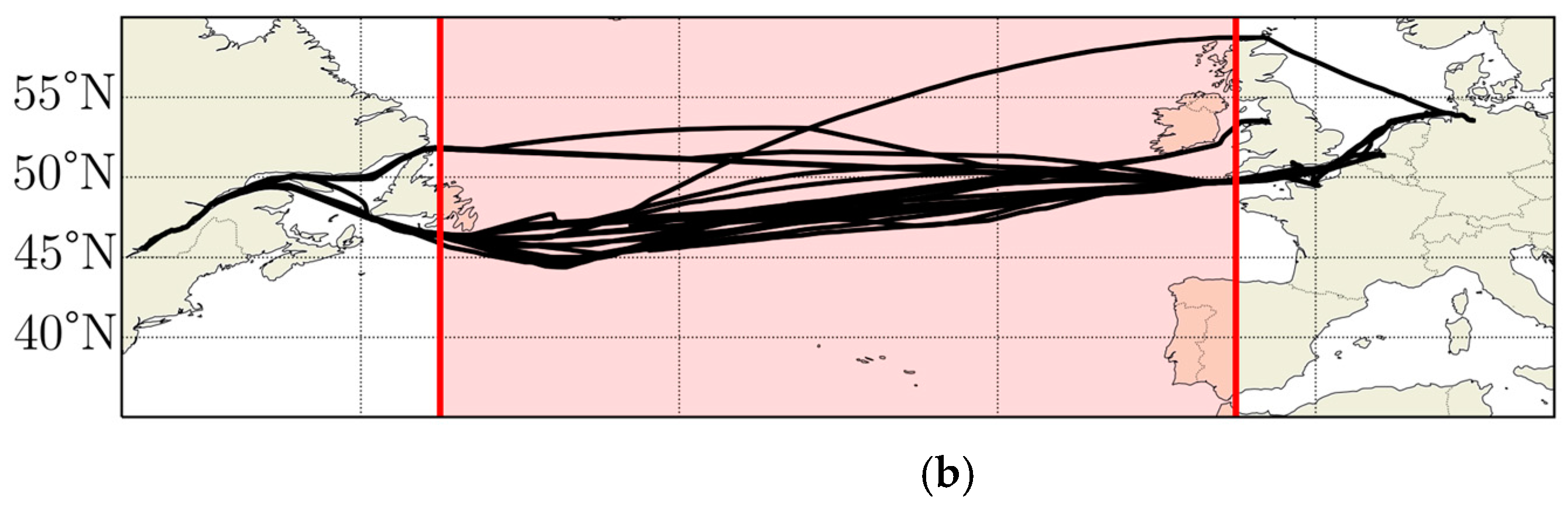
3. Full-Scale Measurements
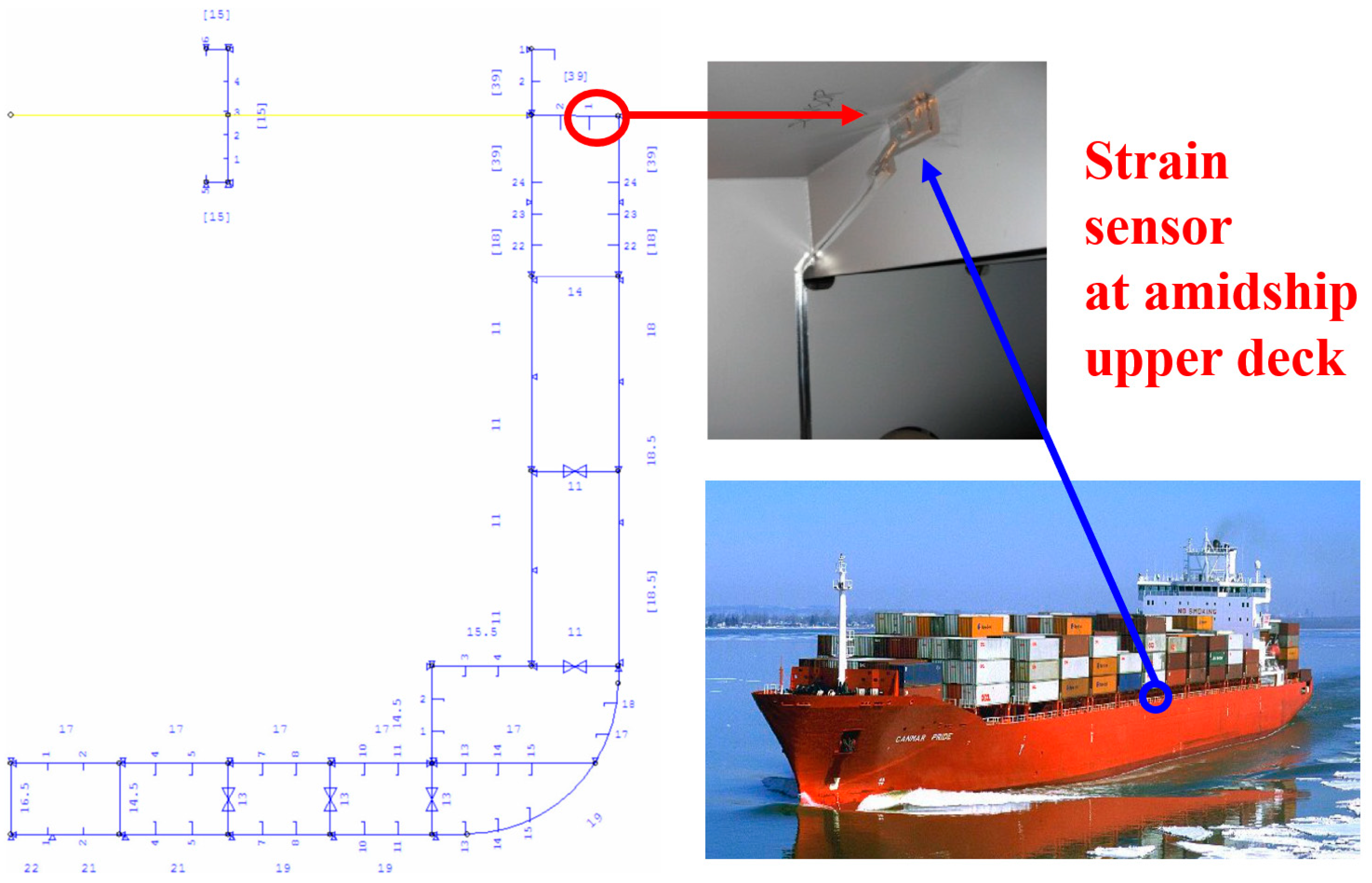
3.1. Case-Study Ship
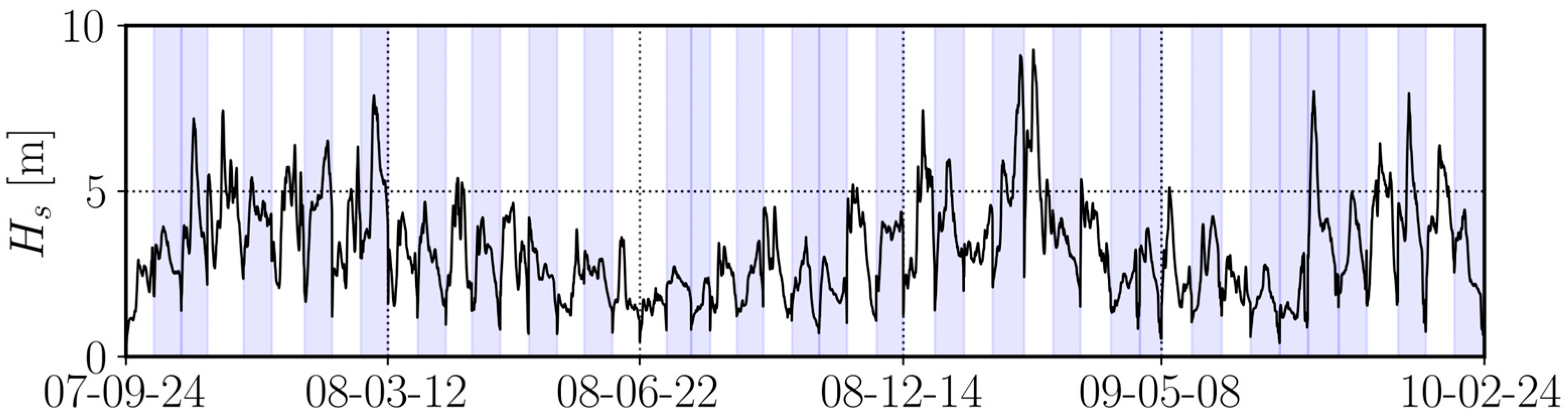
3.2. Data Analysis
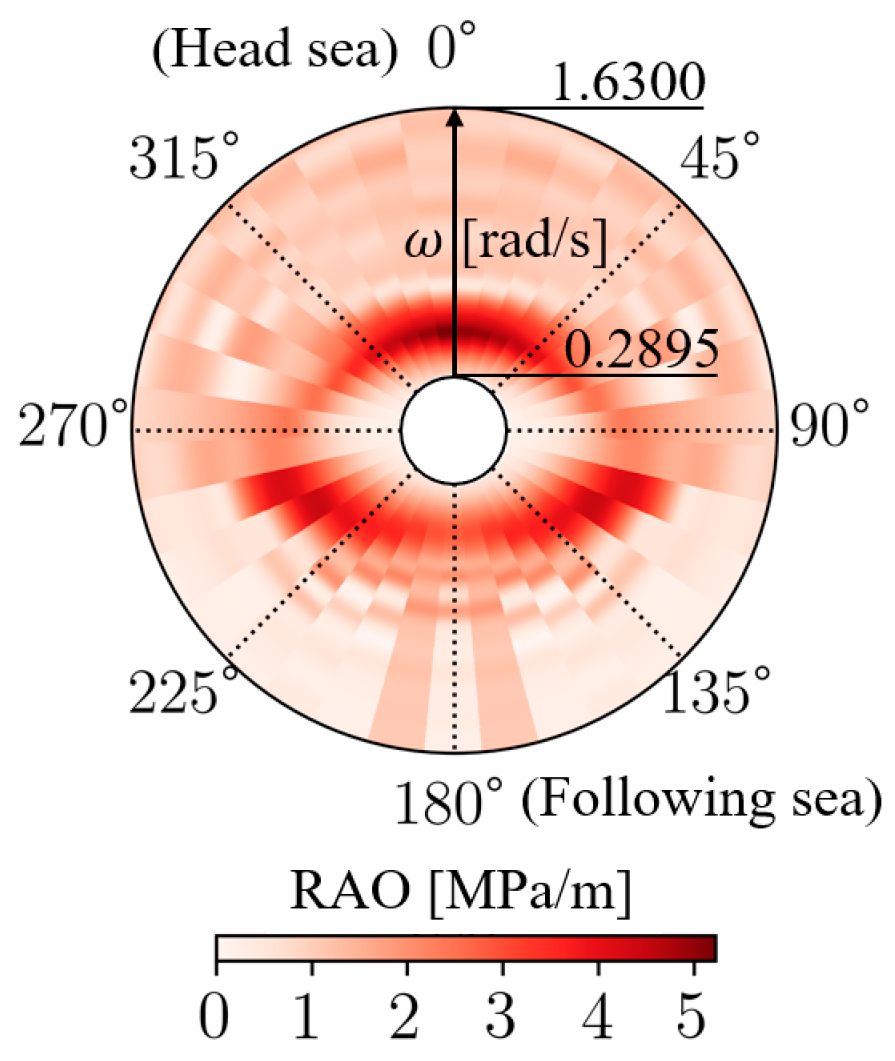
3.3. Rainflow Count Fatigue Damage and RAOs for Spectral Methods
4. Machine Learning Model Establishment
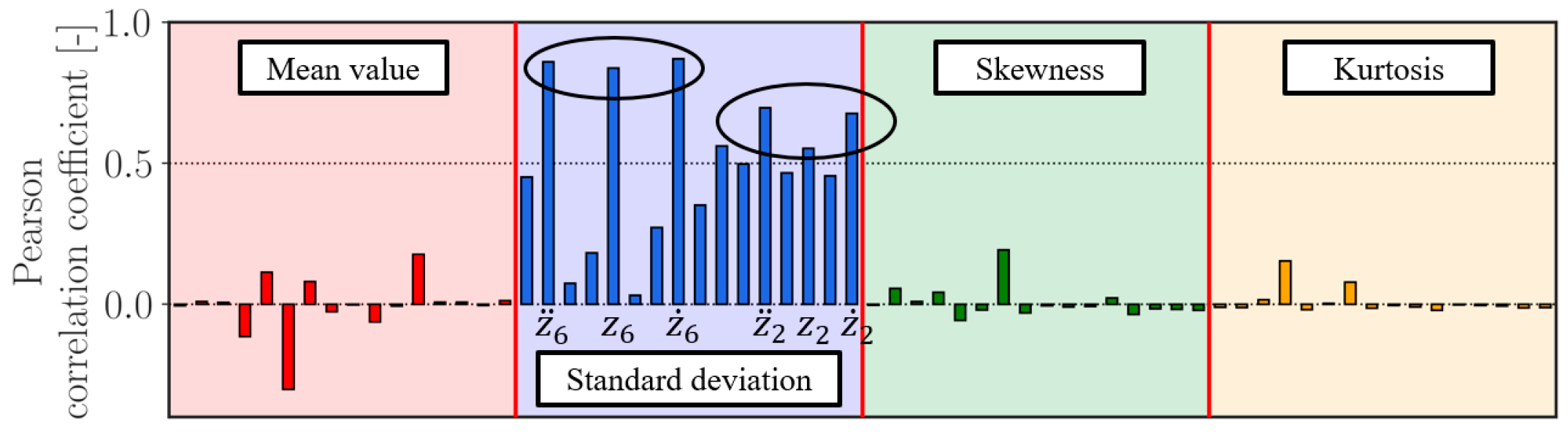
4.1. Input Features
4.2. XGBoost Algorithm
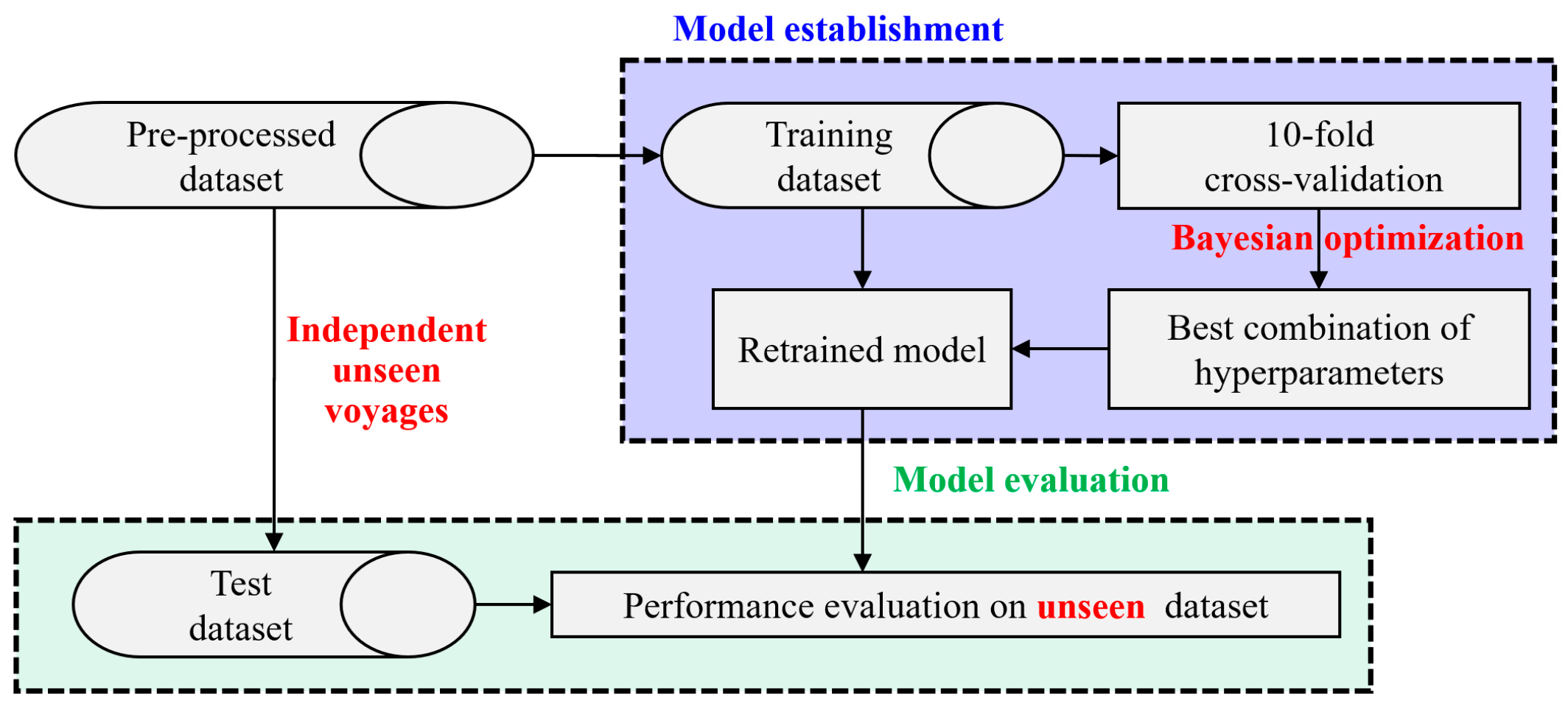
4.3. Model Establishment
5. Results and Discussion
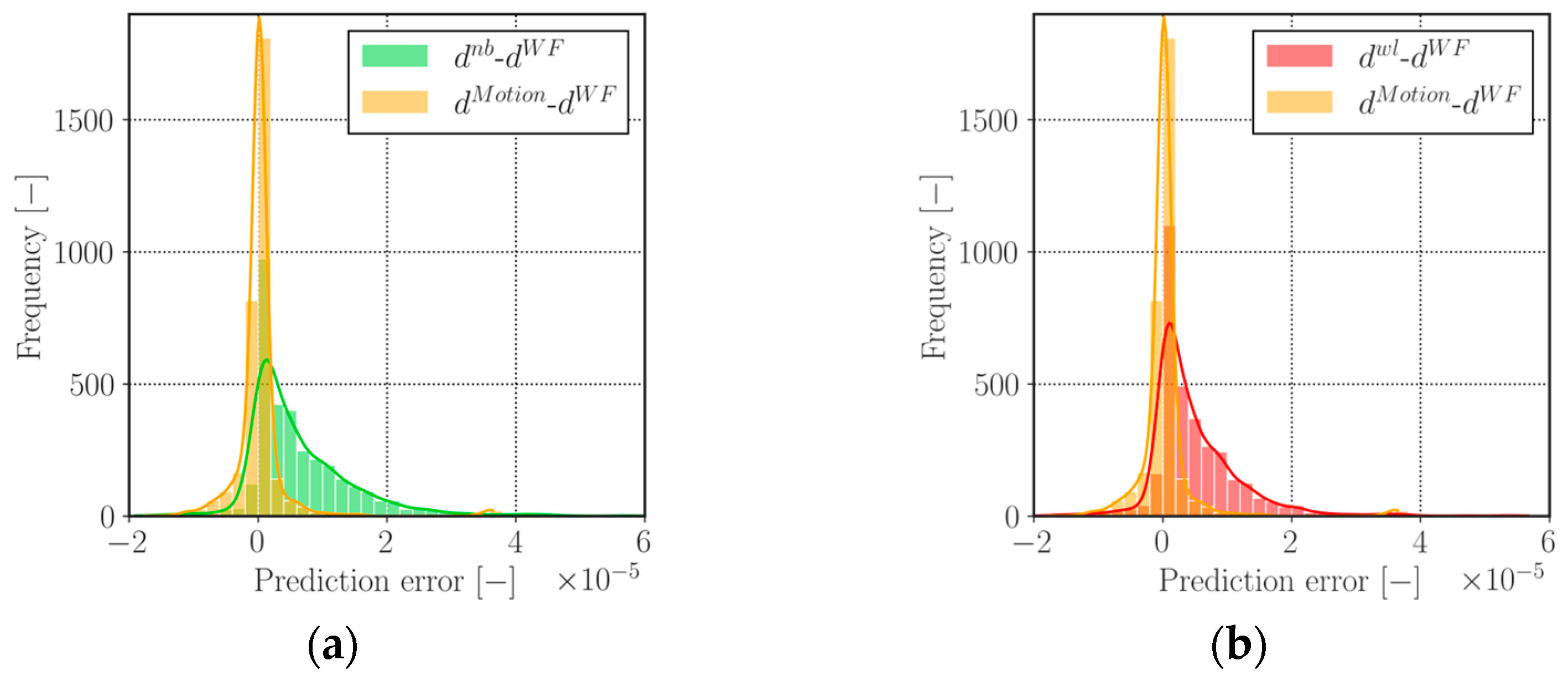
5.1. Fatigue Prediction Uncertainties of Spectral Methods Based on RAOs
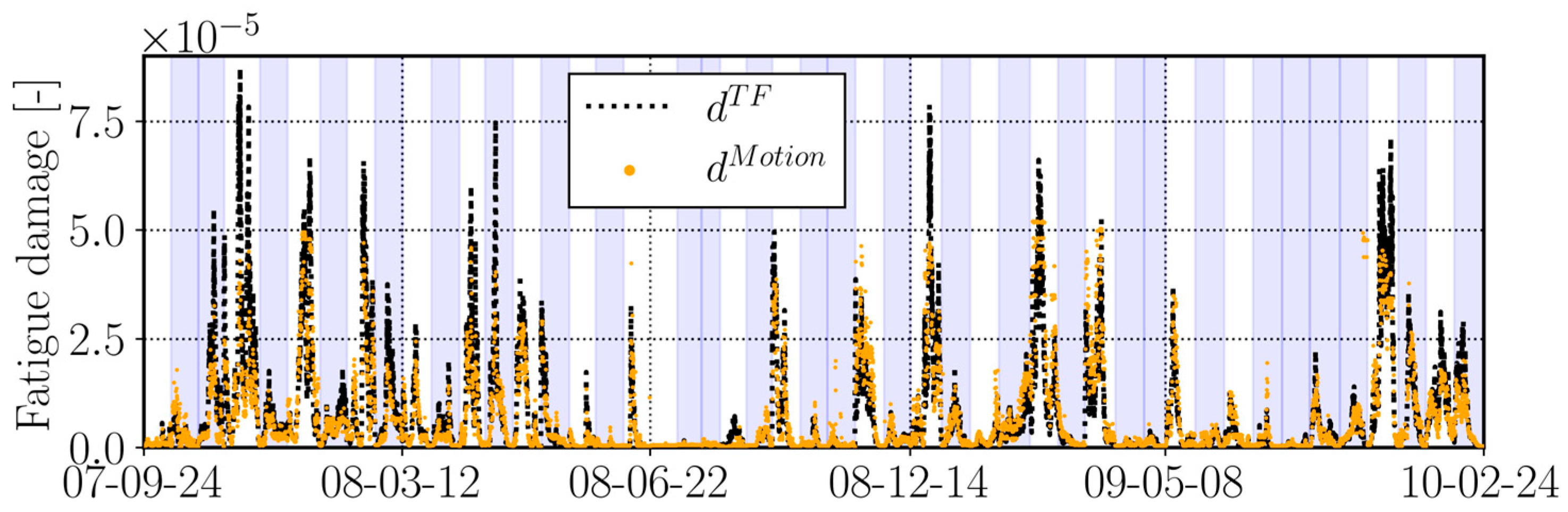
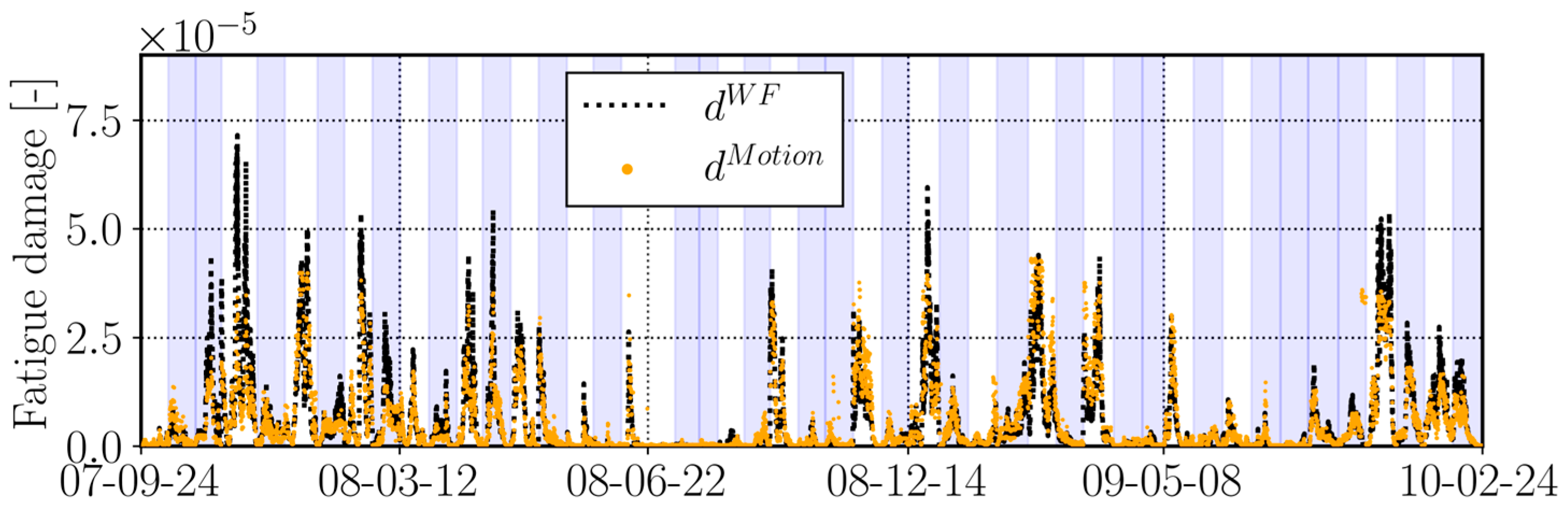
5.2. Fatigue Prediction by Proposed Machine Learning Model Based on Heave and Pitch Motions
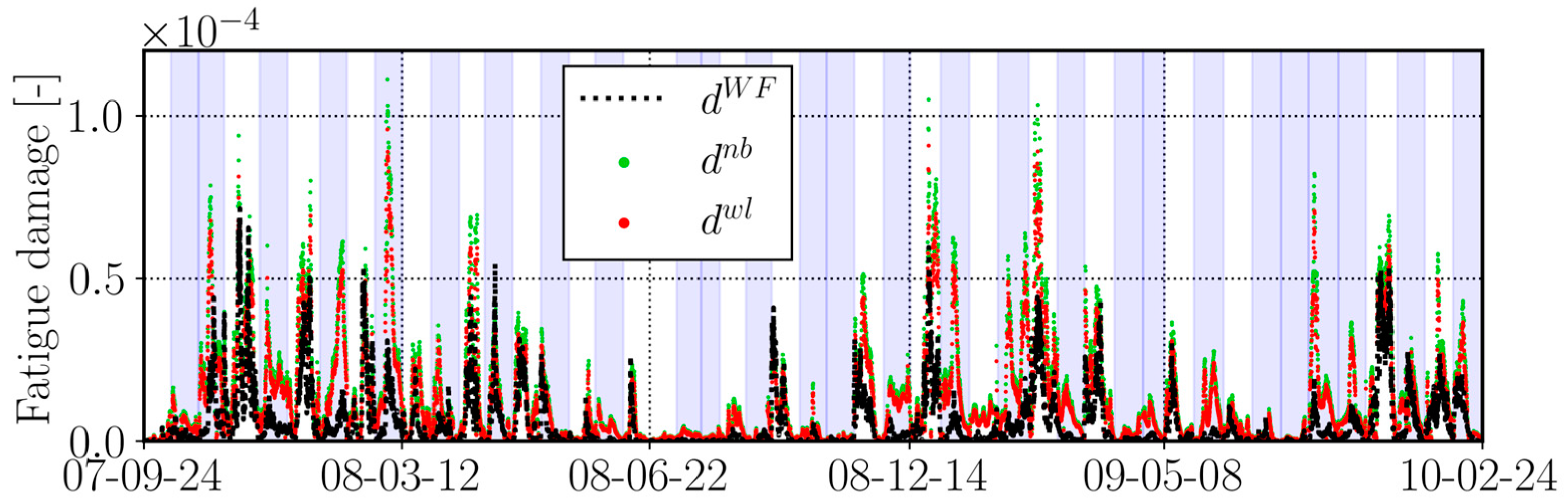
5.3. Fatigue Prediction Ability Evaluation for Long-Term Unseen Voyages
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rychlik, I. A new definition of the rainflow cycle counting method. Int. J. Fatigue 1987, 9, 119–121. [Google Scholar] [CrossRef]
- Rychlik, I. Note of cycle counts in irregular loads. Fatigue Fract. Eng. Mater. Struct. 1993, 16, 377–390. [Google Scholar] [CrossRef]
- Li, Z.; Mao, W.; Ringsberg, J.W.; Johnson, E.; Storhaug, G. A comparative study of fatigue assessments of container ship structures using various direct calculation approaches. Ocean Eng. 2014, 82, 65–74. [Google Scholar] [CrossRef]
- Yang, P.; Li, J.; Zhang, W.; Wu, D.; Gu, X.; Ma, Q. Analysis on statistical uncertainties of wave loads and structural fatigue reliability for a semi-submersible platform. Ocean Eng. 2021, 237, 109609. [Google Scholar] [CrossRef]
- Yosri, A.; Leheta, H.; Saad-Eldeen, S.; Zayed, A. Accumulated fatigue damage assessment of side structural details in a double hull tanker based on spectral fatigue analysis approach. Ocean Eng. 2022, 251, 111069. [Google Scholar] [CrossRef]
- Mao, W. Development of a spectral method and a statistical wave model for crack propagation prediction in ship structures. J. Ship Res. 2014, 58, 106–116. [Google Scholar] [CrossRef]
- Lang, X.; Wang, H.; Mao, W.; Osawa, N. Impact of ship operations aided by voyage optimization on a ship’s fatigue assessment. J. Mar. Sci. Technol. 2020, 26, 750–771. [Google Scholar] [CrossRef]
- Gaidai, O.; Storhaug, G.; Naess, A.; Ye, R.; Cheng, Y.; Xu, X. Efficient fatigue assessment of ship structural details. Ships Offshore Struct. 2019, 15, 1–8. [Google Scholar] [CrossRef]
- Thompson, I. Fatigue damage variation within a class of naval ships. Ocean Eng. 2018, 165, 123–130. [Google Scholar] [CrossRef]
- Yamamoto, N. Fatigue evaluation of ship structures considering change in mean stress condition. Weld. World 2017, 61, 987–995. [Google Scholar] [CrossRef]
- Mao, W. Fatigue Assessment and Extreme Prediction of Ship Structures. PhD Thesis, Chalmers University of Technology, Gothenburg, Sweden, 2010. [Google Scholar]
- Jordan, C.R.; Cochran, C.S. In-service performance of structural details. In Ship Structure Committee; Report SSC-272; US Coast Guard: Washington, DC, USA, 1978. [Google Scholar]
- Jordan, C.R.; Knight, L.T. Further survey of in-service performance of structural details. In Ship Structure Committee; Report SSC-294; US Coast Guard: Washington, DC, USA, 1978. [Google Scholar]
- Fricke, W. Fatigue and fracture of ship structures. In Encyclopedia of Maritime and Offshore Engineering; John Wiley & Sons, Ltd.: New York, NY, USA, 2017; pp. 1–12. [Google Scholar]
- Storhaug, G.; Moe, E.; Piedras Lopes, T.A. Whipping measurements onboard a midsize container vessel operating in the North Atlantic. In Proceedings of the International Symposium on Ship Design and Construction, Marintec, Shanghai, China, 27-30 November 2007; pp. 55–70. [Google Scholar]
- Zhang, M.; Kujala, P.; Musharraf, M.; Zhang, J.; Hirdaris, S. A machine learning method for the prediction of ship motion trajectories in real operational conditions. Ocean Eng. 2023, 283, 114905. [Google Scholar] [CrossRef]
- Gupta, P.; Rasheed, A.; Steen, S. Ship performance monitoring using machine-learning. Ocean Eng. 2022, 254, 111094. [Google Scholar] [CrossRef]
- Bao, H.; Wu, S.; Wu, Z.; Kang, G.; Peng, X.; Withers, P.J. A machine-learning fatigue life prediction approach of additively manufactured metals. Eng. Fract. Mech. 2021, 242, 107508. [Google Scholar] [CrossRef]
- Feng, C.; Su, M.; Xu, L.; Zhao, L.; Han, Y.; Peng, C. A novel generalization ability-enhanced approach for corrosion fatigue life prediction of marine welded structures. Int. J. Fatigue 2023, 166, 107222. [Google Scholar] [CrossRef]
- He, L.; Wang, Z.L.; Akebono, H.; Sugeta, A. Machine learning-based predictions of fatigue life and fatigue limit for steels. J. Mater. Sci. Technol. 2021, 90, 9–19. [Google Scholar] [CrossRef]
- Yan, W.; Deng, L.; Zhang, F.; Li, T.; Li, S. Probabilistic machine learning approach to bridge fatigue failure analysis due to vehicular overloading. Eng. Struct. 2019, 193, 91–99. [Google Scholar] [CrossRef]
- DNV. Classification Note No. 30.7: Fatigue Assessment of Ship Structure; Det Norske Veritas: Bærum, Norway, 2010. [Google Scholar]
- Garbatov, Y.; Ås, S.K.; Besten, H.D.; Haselbach, P.; Kahl, A.; Karr, D.; Kim, M.H.; Liu, J.; Lourenço de Souza, M.I.; Mao, W.; et al. Committee III.2: Fatigue and Fracture. In Proceedings of the 21st International Ship and Offshore Structures Congress, Vancouver, BC, Canada, 11–15 September 2022; Volume 1. [Google Scholar]
- Lee, H.W.; Basaran, C. A review of damage, void evolution, and fatigue life prediction models. Metals 2021, 11, 609. [Google Scholar] [CrossRef]
- Basaran, C. Introduction to Unified Mechanics Theory with Applications, 2nd ed.; Springer-Nature: Berlin/Heidelberg, Germany, 2023. [Google Scholar]
- Egner, W.; Sulich, P.; Mrozinski, S.; Egner, H. Modelling thermo-mechanical cyclic behavior of P91 steel. Int. J. Plast. 2020, 135, 102820. [Google Scholar] [CrossRef]
- Hou, B.; Xiao, R.; Sun, T.F.; Wang, Y.; Liu, J.G.; Zhao, H.; Li, Y.L. A new testing method for the dynamic response of soft cellular materials under combined shear–compression. Int. J. Mech. Sci. 2019, 159, 306–314. [Google Scholar] [CrossRef]
- Mozafari, F.; Thamburaja, P.; Moslemi, N.; Srinivasa, A. Finite-element simulation of multi-axial fatigue loading in metals based on a novel experimentally-validated microplastic hysteresis-tracking method. Finite Elem. Anal. Des. 2021, 187, 103481. [Google Scholar] [CrossRef]
- Tucker, M.J. Waves in Ocean Engineering; Ellis Horwood Ltd.: Chichester, UK, 1991. [Google Scholar]
- Mao, W.; Ringsberg, J.W.; Rychlik, I.; Storhaug, G. Development of a fatigue model useful in ship routing design. J. Ship Res. 2010, 54, 281–293. [Google Scholar] [CrossRef]
- Wirsching, P.H.; Light, M.C. Fatigue under wide band random stresses. J. Struct. Div. 1980, 106, 1593–1607. [Google Scholar] [CrossRef]
- Copernicus. Copernicus Climate Change Service (C3S): ERA5 Fifth Generation of ECMWF Atmospheric Reanalyses of the Global Climate. Available online: https://cds.climate.copernicus.eu/cdsapp#!/home (accessed on 20 October 2021).
- CMEMS. Copernicus Marine Service: Global Ocean Physics Reanalysis. Available online: https://marine.copernicus.eu/ (accessed on 20 October 2021).
- ISO 15016:2015; Ships and Marine Technology—Guidelines for the Assessment of Speed and Power Performance by Analysis of Speed Trial Data. ISO: Geneva, Switzerland, 2015.
- Mao, W.; Ringsberg, J.; Rychlik, I.; Storhaug, G. Comparison between a fatigue model for voyage planning and measurements of a container vessel. In Proceedings of the International Conference on Ocean Offshore and Arctic Engineering (OMAE), Honolulu, HI, USA, 31 May–5 June 2009. [Google Scholar]
- Friedman, J.; Hastie, T.; Tibshirani, R. Additive logistic regression: A statistical view of boosting. Ann. Statist. 2000, 28, 337–407. [Google Scholar] [CrossRef]
- Chen, T.Q.; Guestrin, C. XGBoost: A scalable tree boosting system. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 785–794. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Magnitude |
|---|---|---|
| Max. TEU | - | 2800 |
| Length between perpendiculars | 232 [m] | |
| Molded breadth | 32.2 [m] | |
| Molded depth | 19.0 [m] | |
| Design draft | 10.78 [m] | |
| Block coefficient | 0.685 | |
| Deadweight | 40,900 [tons] | |
| Service speed | 21.3 [knots] |
| Hyperparameters | Tuning Range |
|---|---|
| learning_rate | (0.01, 1.0) |
| n_estimators | (100, 5000) |
| max_depth | (3, 10) |
| reg_alpha | (0, 100) |
| reg_lambda | (0, 100) |
| colsample_bytree | (0.5, 1) |
| min_child_weight | (0, 10) |
| gamma | (0, 5) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lang, X.; Wu, D.; Tian, W.; Zhang, C.; Ringsberg, J.W.; Mao, W. Fatigue Assessment Comparison between a Ship Motion-Based Data-Driven Model and a Direct Fatigue Calculation Method. J. Mar. Sci. Eng. 2023, 11, 2269. https://doi.org/10.3390/jmse11122269
Lang X, Wu D, Tian W, Zhang C, Ringsberg JW, Mao W. Fatigue Assessment Comparison between a Ship Motion-Based Data-Driven Model and a Direct Fatigue Calculation Method. Journal of Marine Science and Engineering. 2023; 11(12):2269. https://doi.org/10.3390/jmse11122269
Chicago/Turabian StyleLang, Xiao, Da Wu, Wuliu Tian, Chi Zhang, Jonas W. Ringsberg, and Wengang Mao. 2023. "Fatigue Assessment Comparison between a Ship Motion-Based Data-Driven Model and a Direct Fatigue Calculation Method" Journal of Marine Science and Engineering 11, no. 12: 2269. https://doi.org/10.3390/jmse11122269
APA StyleLang, X., Wu, D., Tian, W., Zhang, C., Ringsberg, J. W., & Mao, W. (2023). Fatigue Assessment Comparison between a Ship Motion-Based Data-Driven Model and a Direct Fatigue Calculation Method. Journal of Marine Science and Engineering, 11(12), 2269. https://doi.org/10.3390/jmse11122269