
Adaptive Fuzzy Quantized Control for a Cooperative USV-UAV System Based on Asynchronous Separate Guidance



Abstract
:1. Introduction
2. Problem for Formulation and Preliminaries
2.1. USV-UAV System Modeling
2.2. Fuzzy Logic System
2.3. Hysteresis Quantization
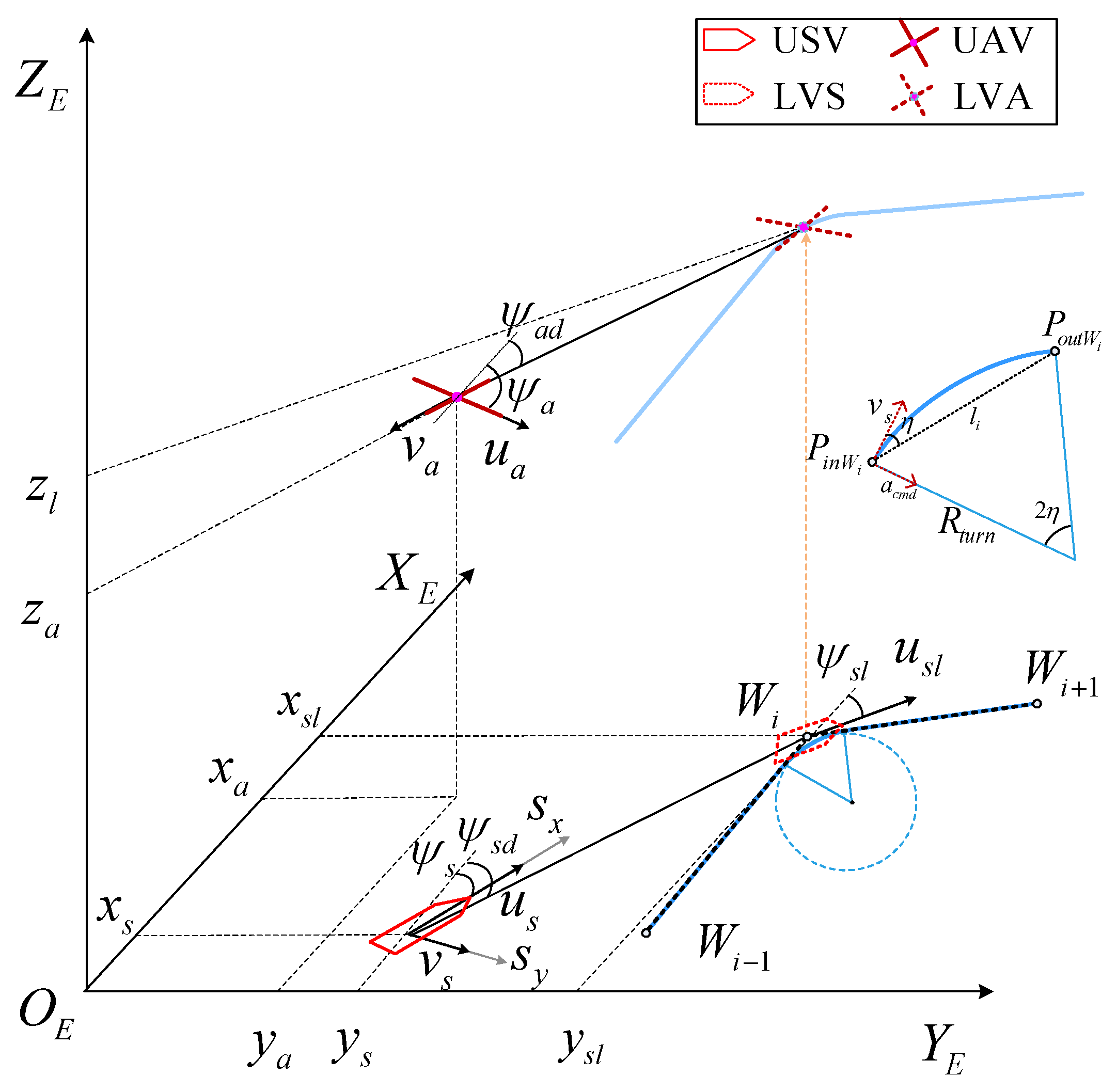
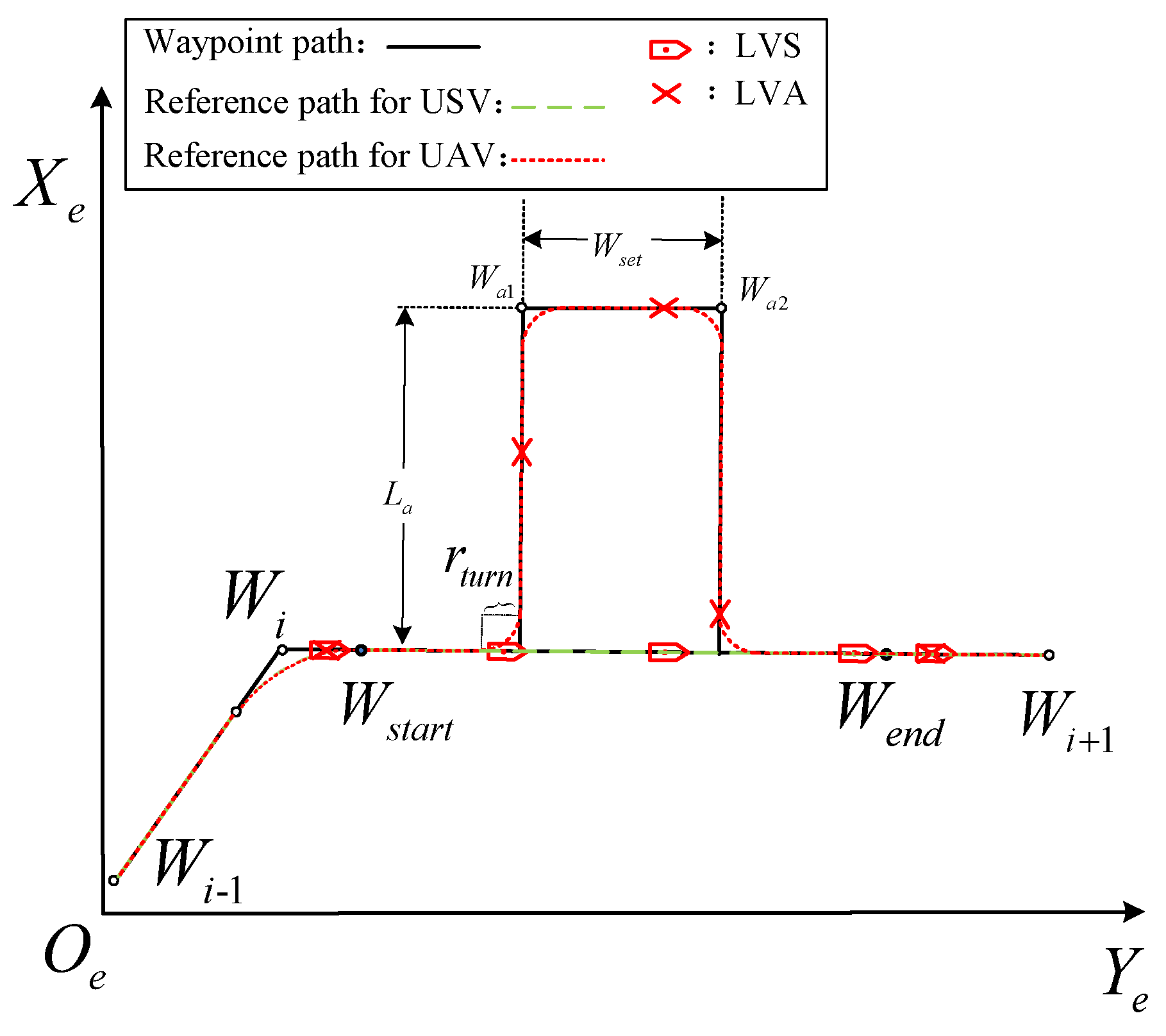
3. Asynchronous Separate Guidance Principle
3.1. The Guidance Principle for USV
3.2. The Guidance Principle for UAV
4. Control Design
4.1. Control Design for the Position Loop
4.2. Control Design for the Attitude Loop
4.3. Stability Analysis
5. Numerical Experiment
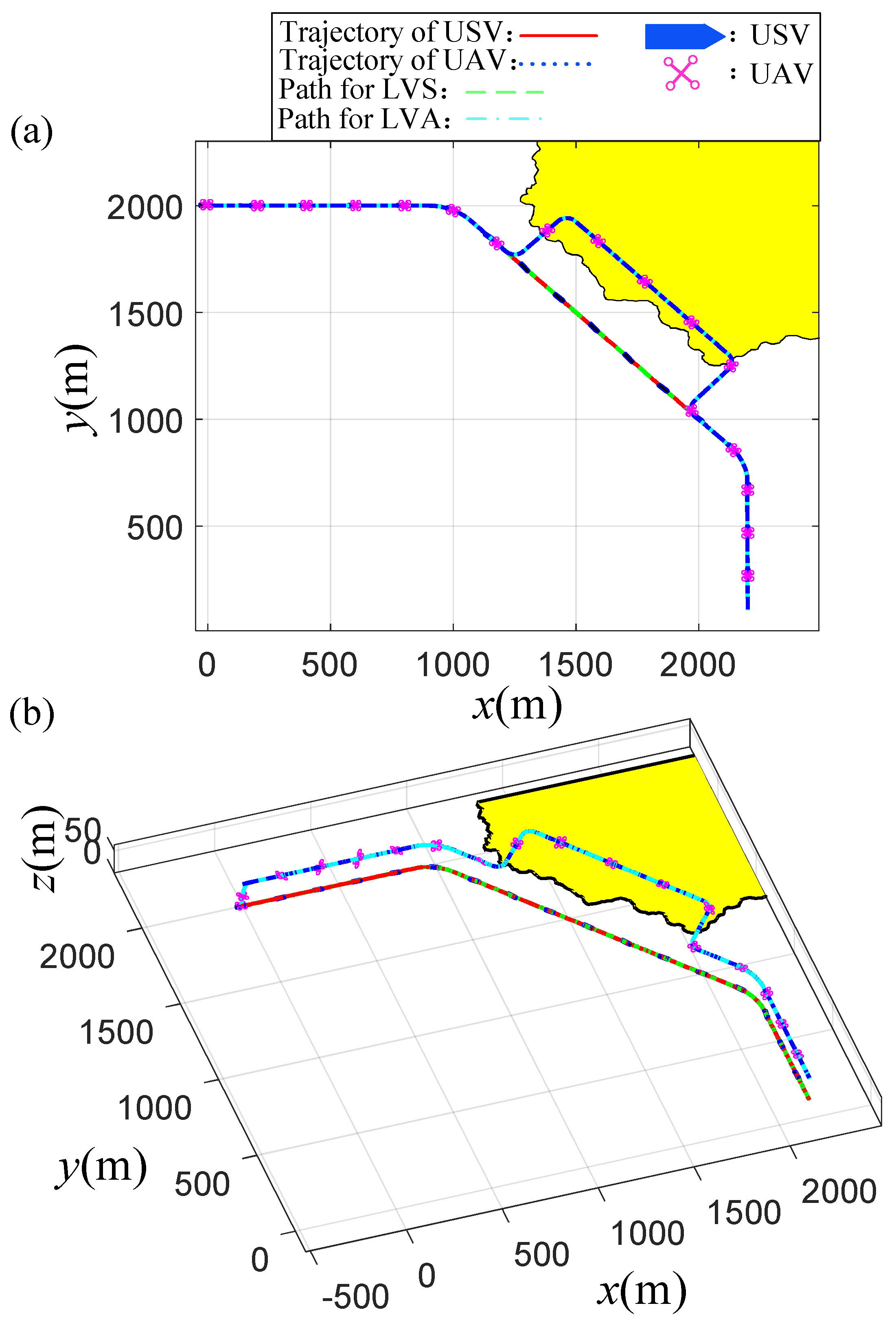
5.1. Guidance-based Simulation Experiment
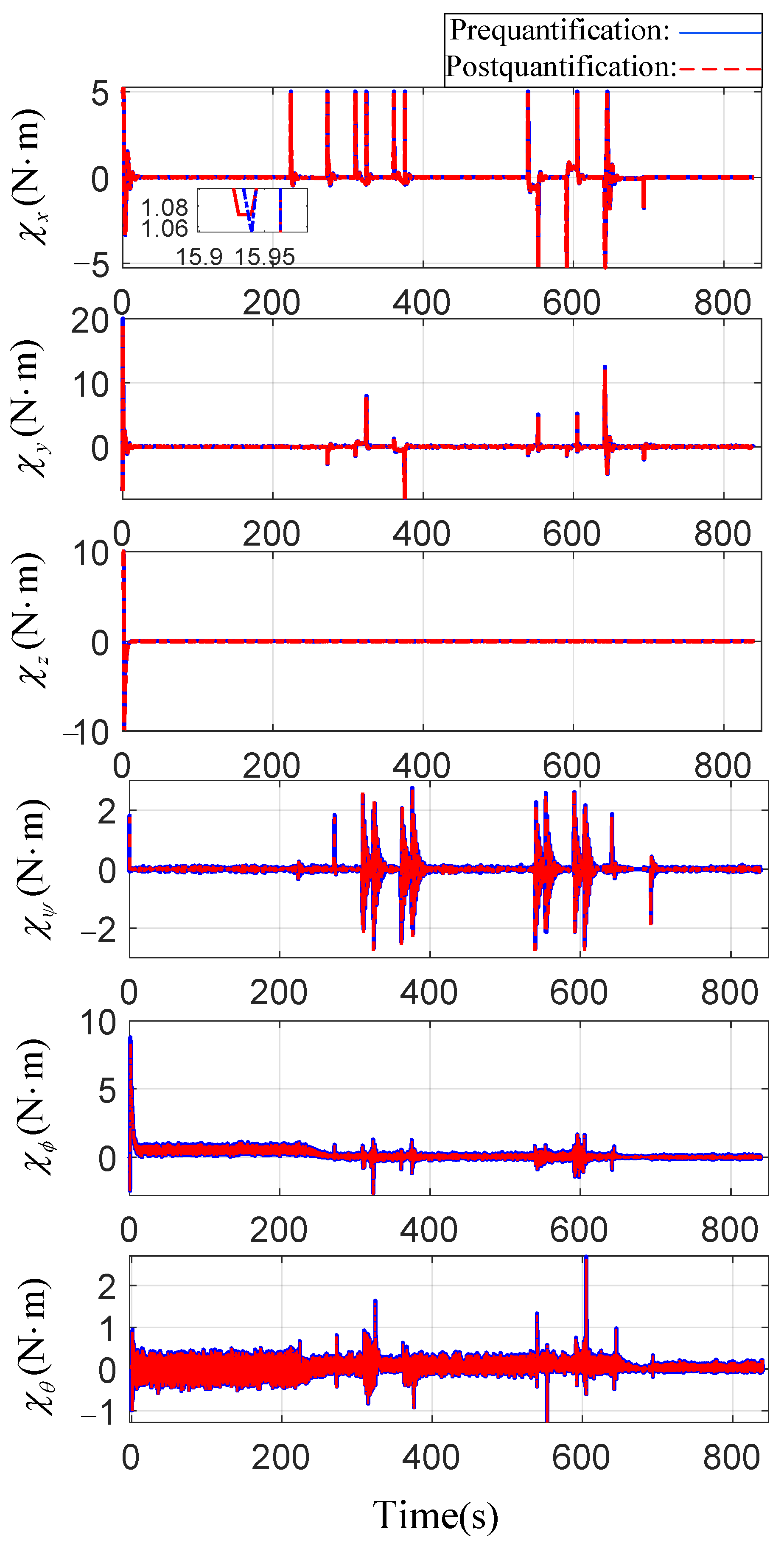
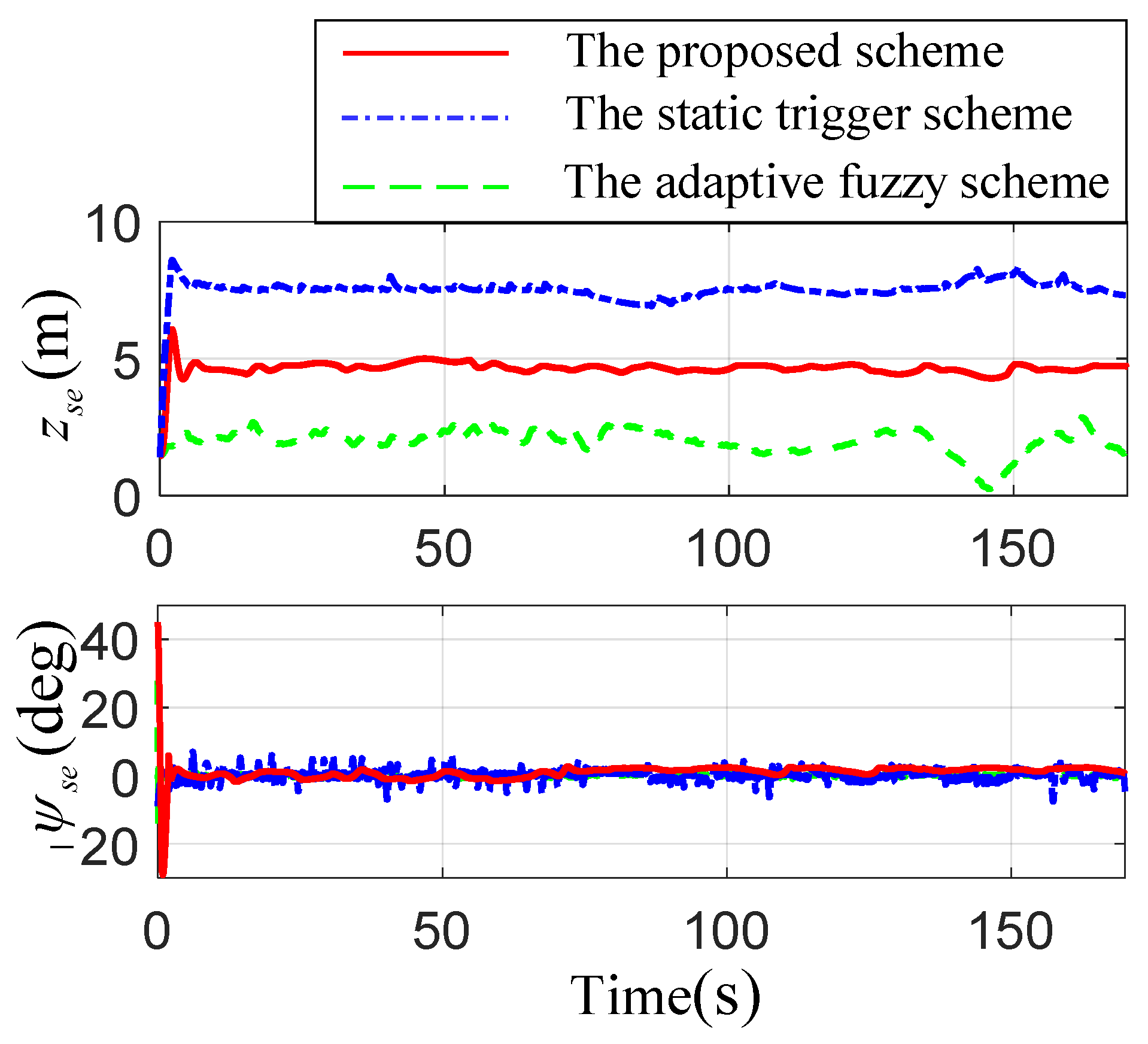
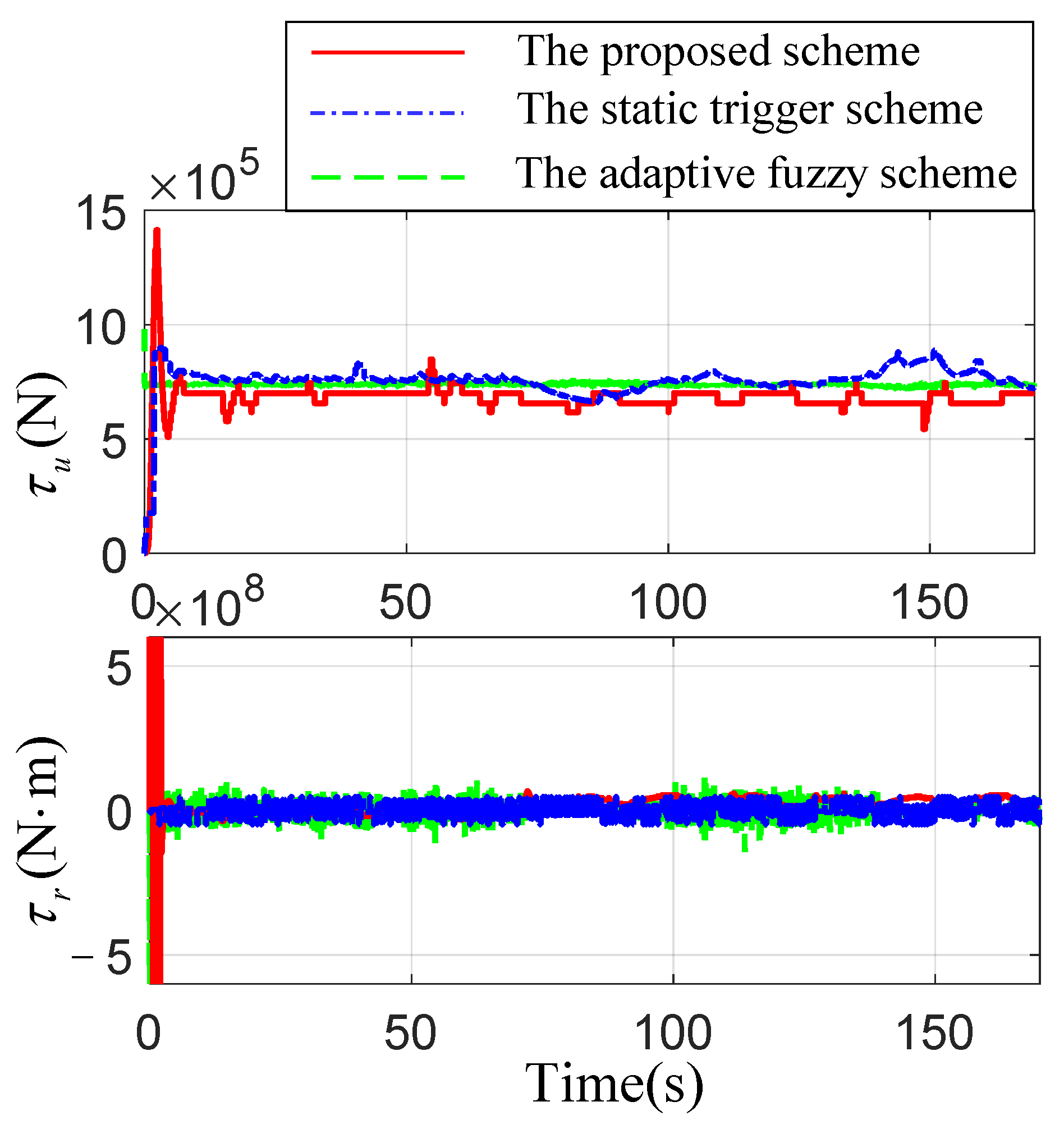
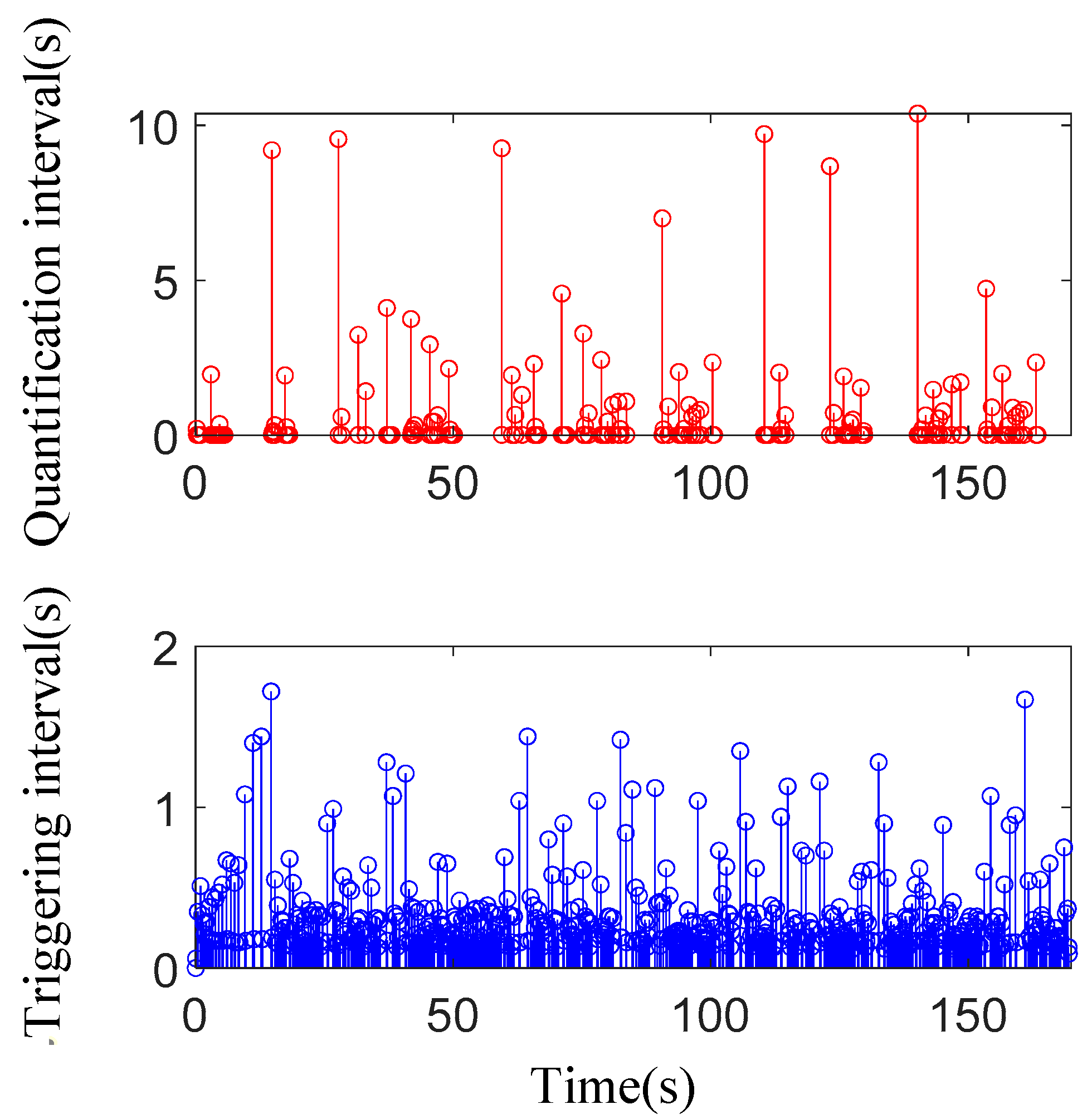
5.2. Comparative Experiment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Trejo, J.A.V.; Ponsart, J.-C.; Adam-Medina, M.; Valencia-Palomo, G.; Theilliol, D. Distributed Observer-based Leader-following Consensus Control for LPV Multi-agent Systems: Application to multiple VTOL-UAVs Formation Control. In Proceedings of the 2023 International Conference on Unmanned Aircraft Systems (ICUAS), Warsaw, Poland, 6–9 June 2023; pp. 1316–1323. [Google Scholar]
- Zhang, B.; Ji, D.; Liu, S.; Zhu, X.; Xu, W. Autonomous underwater vehicle navigation: A review. Ocean Eng. 2023, 273, 113861. [Google Scholar] [CrossRef]
- Zeng, Z.; Sammut, K.; Lian, L.; Lammas, A.; He, F.; Tang, Y. Rendezvous path planning for multiple autonomous marine vehicles. IEEE J. Ocean. Eng. 2018, 43, 640–664. [Google Scholar] [CrossRef]
- Liu, B.; Zhang, H.-T.; Meng, H.; Fu, D.; Su, H. Scanning-Chain formation control for multiple unmanned surface vessels to pass through water channels. IEEE Trans. Cybern. 2022, 52, 1850–1861. [Google Scholar] [CrossRef]
- Wu, Y.; Low, K.H.; Lv, C. Cooperative path planning for heterogeneous unmanned vehicles in a search-and-track mission aiming at an underwater target. IEEE Trans. Veh. Technol. 2020, 69, 6782–6787. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Zhang, X.; Zhang, W. Integrating dynamic event-triggered and sensor-tolerant control: Application to USV-UAVs cooperative formation system for maritime parallel search. IEEE Trans. Intell. Transp. Syst. 2023, 1–13. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Zhang, W.; Shan, Q.; Zhang, W. Cooperative path following control of USV-UAVs considering low design complexity and command transmission requirements. IEEE Trans. Intell. Veh. 2023, 1–10. [Google Scholar] [CrossRef]
- Xiang, J.W.; Dong, X.W.; Ding, W.R. Key technologies for autonomous cooperation of unmanned swarm systems in complex environments. Acta Aeronaut. Astronaut. Sin. 2022, 43, 527570. [Google Scholar]
- Duan, H.B.; Shen, Y.K.; Wang, Y.; Luo, D.; Niu, Y. Review of technological hotspots of unmanned aerial vehicle in 2018. Sci. Technol. Rev. 2019, 37, 82–90. [Google Scholar]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011; pp. 112–124. [Google Scholar]
- Zhang, G.; Zhang, X. A novel DVS guidance principle and robust adaptive path-following control for underactuated ships using 473 low frequency gain-learning. ISA Trans. 2015, 56, 75–85. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Shan, Q.; Zhang, W. A novel cooperative de sign for USV-UAV systems: 3D mapping guidance and adaptive fuzzy control. IEEE Trans. Control Netw. Syst. 2023, 10, 564–574. [Google Scholar] [CrossRef]
- Zhang, H.-T.; Hu, B.-B.; Xu, Z.; Cai, Z.; Liu, B.; Wang, X.; Geng, T.; Zhong, S.; Zhao, J. Visual navigation and landing control of an unmanned aerial vehicle on a moving autonomous surface vehicle via adaptive learning. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 5345–5355. [Google Scholar] [CrossRef] [PubMed]
- Qin, S.; Yang, X.; Zhang, W.; Sun, M.; Liu, X.; Zhen, Z. Multi-target cooperative path planning for air-sea heterogeneous unmanned system. In Proceedings of the 2023 6th International Symposium on Autonomous Systems (ISAS), Nanjing, China, 23–25 June 2023; pp. 1–6. [Google Scholar]
- Niu, H.; Ji, Z.; Liguori, P.; Yin, H.; Carrasco, J. Design, integration and sea trials of 3D printed unmanned aerial vehicle and unmanned surface vehicle for cooperative missions. In Proceedings of the 2021 IEEE/SICE International Symposium on System Integration (SII), Iwaki, Japan, 11–14 January 2021; pp. 590–591. [Google Scholar]
- Liu, D.; Rong, H.; Soares, C.G. Shipping route modelling of AIS maritime traffic data at the approach to ports. Ocean Eng. 2023, 289, 115868. [Google Scholar] [CrossRef]
- Liu, Z.; Huang, D.; Li, S.; Zhang, W.; Lu, H. Adaptive robust control of the UAV-USV heterogeneous system with unknown fractional-order dynamics under multiple disturbances. In Proceedings of the 2023 42nd Chinese Control Conference (CCC), Tianjin, China, 24–26 July 2023; pp. 5872–5877. [Google Scholar]
- MahmoudZadeh, S.; Abbasi, A.; Yazdani, A.; Wang, H.; Liu, Y. Uninterrupted path planning system for Multi-USV sampling mission in a cluttered ocean environment. Ocean Eng. 2022, 254, 111328. [Google Scholar] [CrossRef]
- Zhang, C.-L.; Guo, G. Prescribed performance fault-tolerant control of nonlinear systems via actuator switching. IEEE Trans. Fuzzy Syst. 2023, 1–10. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Cabecinhas, D.; Pascoal, A.; Zhang, W. Prescribed performance path following control of USVs via an output-based threshold rule. IEEE Trans. Veh. Technol. 2023, 1–12. [Google Scholar] [CrossRef]
- Zhang, G.; Li, J.; Jin, X.; Liu, C. Robust adaptive neural control for wing-sail-assisted vehicle via the multiport event-triggered approach. IEEE Trans. Cybern. 2022, 52, 12916–12928. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, X.; Bu, R. Radial basis function neural network sliding mode control for ship path following based on position prediction. J. Mar. Sci. Eng. 2021, 9, 1055. [Google Scholar] [CrossRef]
- Hua, C.-C.; Wang, K.; Chen, J.-N.; You, X. Tracking differentiator and extended state observer-based nonsingular fast terminal sliding mode attitude control for a quadrotor. Nonlinear Dyn. 2018, 94, 343–354. [Google Scholar] [CrossRef]
- Swaroop, D.; Hedrick, J.K.; Yip, P.P.; Gerdes, J.C. Dynamic surface control for a class of nonlinear systems. IEEE Trans. Autom. Control 2000, 45, 1893–1899. [Google Scholar] [CrossRef]
- Yu, J.L.; Dong, W.X.; Li, Q.D.; Ren, Z. Practical time-varying formation tracking for high-order nonlinear multi-agent systems based on the distributed extended state observer. Int. J. Control 2019, 92, 2451–2462. [Google Scholar] [CrossRef]
- Liao, F.; Teo, R.; Wang, J.L.; Dong, X.; Lin, F.; Peng, K. Distributed Formation and Reconfiguration Control of VTOL UAVs. IEEE Trans. Control Syst. Technol. 2017, 25, 270–277. [Google Scholar] [CrossRef]
- Zheng, Z.; Feroskhan, M. Path following of a surface vessel with prescribed performance in the presence of input saturation and external disturbances. IEEE/ASME Trans. Mechatron. 2017, 22, 2564–2575. [Google Scholar] [CrossRef]
- Lili, W.; Chen, M. Distributed DETMs-based internal collision avoidance control for UAV formation with lumped disturbances. Appl. Math. Comput. 2022, 433, 127362. [Google Scholar]
- Nuchkrua, T.; Leephakpreeda, T. Novel Compliant Control of a Pneumatic Artificial Muscle Driven by Hydrogen Pressure Under a Varying Environment. IEEE Trans. Ind. Electron. 2022, 69, 7120–7129. [Google Scholar] [CrossRef]
- Hayakawaa, T.; Ishii, H.; Tsumurac, K. Adaptive quantized control for linear uncertain discrete-time systems. Automatica 2009, 45, 692–700. [Google Scholar] [CrossRef]
- Hayakawaa, T.; Ishii, H.; Tsumurac, K. Adaptive quantized control for nonlinear uncertain systems. Syst. Control Lett. 2009, 58, 625–632. [Google Scholar] [CrossRef]
- Zhou, J.; Wen, C.; Yang, G. Adaptive backstepping stabilization of nonlinear uncertain systems with quantized input signal. IEEE Trans. Autom. Control 2014, 59, 460–464. [Google Scholar] [CrossRef]
- Yang, W.; Cui, G.; Yu, J.; Tao, C.; Li, Z. Finite-time adaptive fuzzy quantized control for a quadrotor UAV. IEEE Access 2020, 8, 179363–179372. [Google Scholar] [CrossRef]
- Shao, G.; Ma, Y.; Malekian, R.; Yan, X.; Li, Z. A novel cooperative platform design for coupled USV-UAV systems. IEEE Trans. Ind. Inform. 2019, 15, 4913–4922. [Google Scholar] [CrossRef]
- Ke, C.; Chen, H.F. Cooperative path planning for air-sea heterogeneous unmanned vehicles using search-and-tracking mission. Ocean. Eng. 2022, 262, 112020. [Google Scholar] [CrossRef]
- Do, K. Practical control of underactuated ships. Ocean Eng. 2010, 37, 1111–1119. [Google Scholar] [CrossRef]
- Eliker, K.; Zhang, W. Finite-time adaptive integral backstepping fast terminal sliding mode control application on quadrotor UAV. Int. J. Control Autom. Syst. 2020, 18, 415–430. [Google Scholar] [CrossRef]
- Labbadi, M.; Cherkaoui, M. Robust adaptive backstepping fast terminal sliding mode controller for uncertain quadrotor UAV. Aerosp. Sci. Technol. 2019, 93, 105306. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, F.; Zhang, Y.; Chen, C.L.P. Fuzzy adaptive quantized control for a class of stochastic nonlinear uncertain systems. IEEE Trans. Cybern. 2016, 46, 524–534. [Google Scholar] [CrossRef] [PubMed]
- Park, S.; Deyst, J.; How, J.P. A new nonlinear guidance logic for trajectory tracking. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Providence, RI, USA, 16–19 August 2004; Volume 2, pp. 941–956. [Google Scholar]
- Wang, H.; Zhang, S. Event-triggered reset trajectory tracking control for unmanned surface vessel system. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2021, 235, 633–645. [Google Scholar] [CrossRef]
- Lin, X.; Nie, J.; Jiao, Y.; Liang, K.; Li, H. Adaptive fuzzy output feedback stabilization control for the underactuated surface vessel. Appl. Ocean Res. 2018, 74, 40–48. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, Y.; Zhang, G.; Li, J. Adaptive Fuzzy Quantized Control for a Cooperative USV-UAV System Based on Asynchronous Separate Guidance. J. Mar. Sci. Eng. 2023, 11, 2331. https://doi.org/10.3390/jmse11122331
Xing Y, Zhang G, Li J. Adaptive Fuzzy Quantized Control for a Cooperative USV-UAV System Based on Asynchronous Separate Guidance. Journal of Marine Science and Engineering. 2023; 11(12):2331. https://doi.org/10.3390/jmse11122331
Chicago/Turabian StyleXing, Yingshuo, Guoqing Zhang, and Jiqiang Li. 2023. "Adaptive Fuzzy Quantized Control for a Cooperative USV-UAV System Based on Asynchronous Separate Guidance" Journal of Marine Science and Engineering 11, no. 12: 2331. https://doi.org/10.3390/jmse11122331
APA StyleXing, Y., Zhang, G., & Li, J. (2023). Adaptive Fuzzy Quantized Control for a Cooperative USV-UAV System Based on Asynchronous Separate Guidance. Journal of Marine Science and Engineering, 11(12), 2331. https://doi.org/10.3390/jmse11122331