1. Introduction
Shipping in the future will be green, intelligent, and resilient. Green shipping will help protect the ecological environment and improve efficiency. To promote the green development of the shipping industry and reduce its greenhouse gas emissions, the International Maritime Organization (IMO) has put forward a series of mandatory ship energy efficiency regulations [
1]. Additionally, they have proposed ship energy efficiency measures for technology and operation, such as new energy application [
2], propulsion system optimization [
3], speed optimization, etc. Increasing the applications of new energy technologies and intelligent energy efficiency management technologies for ships has become an effective means of fulfilling the requirements of international conventions, achieving energy conservation and emission reduction targets, and winning competitive advantages. In Europe, people are conducting research on inland vessels and on the intelligence of such vessels. Projects such as the AEGIS, NOVIMAR, and MOSES which use new technologies to improve the efficiency and safety of shipping are ongoing. In China, we do not only focus on intelligent vessels; in addition, there are a lot of ongoing projects for both inland waterways and open seas. Shipping is the transportation of cargo by ships and the intelligence of the carrier is the most important aspect of all the techniques involved in the shipping industry.
The International Maritime Organization (IMO) named these vessels Maritime Autonomous Surface Ships (MASS), which are believed to be safer, greener, and more efficient than the traditional ones. Since 2012, starting with the MUNIN project, a lot of work has been dedicated to this field, and breakthroughs are expected soon. MASS have different levels and different functions. Semi-autonomous navigation and remote monitoring are believed to be the key functions of future vessels. There are many ongoing projects; some have been developed in the last 3 years including the SEAFAR project from Belgium [
4], the intelligent tug developed by Wartsila in Singapore in 2019 [
5], and the remote-control operations in Japan and Korea in 2021 [
6,
7]. Encouraged by the rapid improvement of single intelligent vessel technology, vessel formation has also attracted much attention for its economic advantages in inland, sea-river, or short-sea waterways [
8]. For example, the Vessel Train, consisting of a Lead Vessel and several Follower Vessels, was proposed by the NOVIMAR project in 2017 [
9].
Before entering the world of intelligent vessels, we must know what is the driving force of this trend. Why does the world need intelligent vessels? From our perspective, first of all, intelligent vessels can improve safety. Nowadays, accidents are believed to be primarily caused by human errors or mistakes. If artificial intelligence technology can be used to help human beings and gradually replace human functions, it is a way of reducing the occurrence of accidents. Second, future shipping is expected to increase economic benefits by transporting more cargo with higher efficiency. The deckhouse staff can transfer the work from the shipside to the shoreside. Future operators may relocate onshore to remotely control the vessel. Then, the vessel would not need to be equipped with a large deckhouse, and thus the economic benefits would be greater because there would be more room available to transport more cargo. Furthermore, if we can reduce the number of people or staff on the vessel, it is clear that labor costs and supplies for staff onboard can be reduced.
Vessels do not sail alone, especially on inland waterways. Inland vessels can receive support from the shoreside (e.g., communication). Therefore, in this paper, we would propose the concept of a new generation of waterway transportation systems. The New Generation of Waterborne Transportation Systems (NEW-WTS) is green, intelligent, and resilient. Based on the cyber-physical system theory, the hierarchical structure is divided into three levels: elemental unit level, functional system level, and architecture system level. The core components of the system are green intelligent vessels, digital ecological infrastructures, reliable shore-based support facilities, and resilient operation services within an integral framework. Practical applications of these core technologies and components are shown in the following sections to be taken as references for relevant developments.
2. Key Technologies for a Green and Intelligent Inland Vessel
The key technologies for green intelligent inland vessels consist of five parts. First, parallel intelligence is the key to developing an intelligent system. Second, intelligent navigation includes reinforcement sensation, intelligent control, and remote control. Third, green energy supports environmentally friendly navigation. Fourth, electricity propulsion of maritime traffic at the shipping scale. Last but not least, testing and verification techniques support development and certification issues.
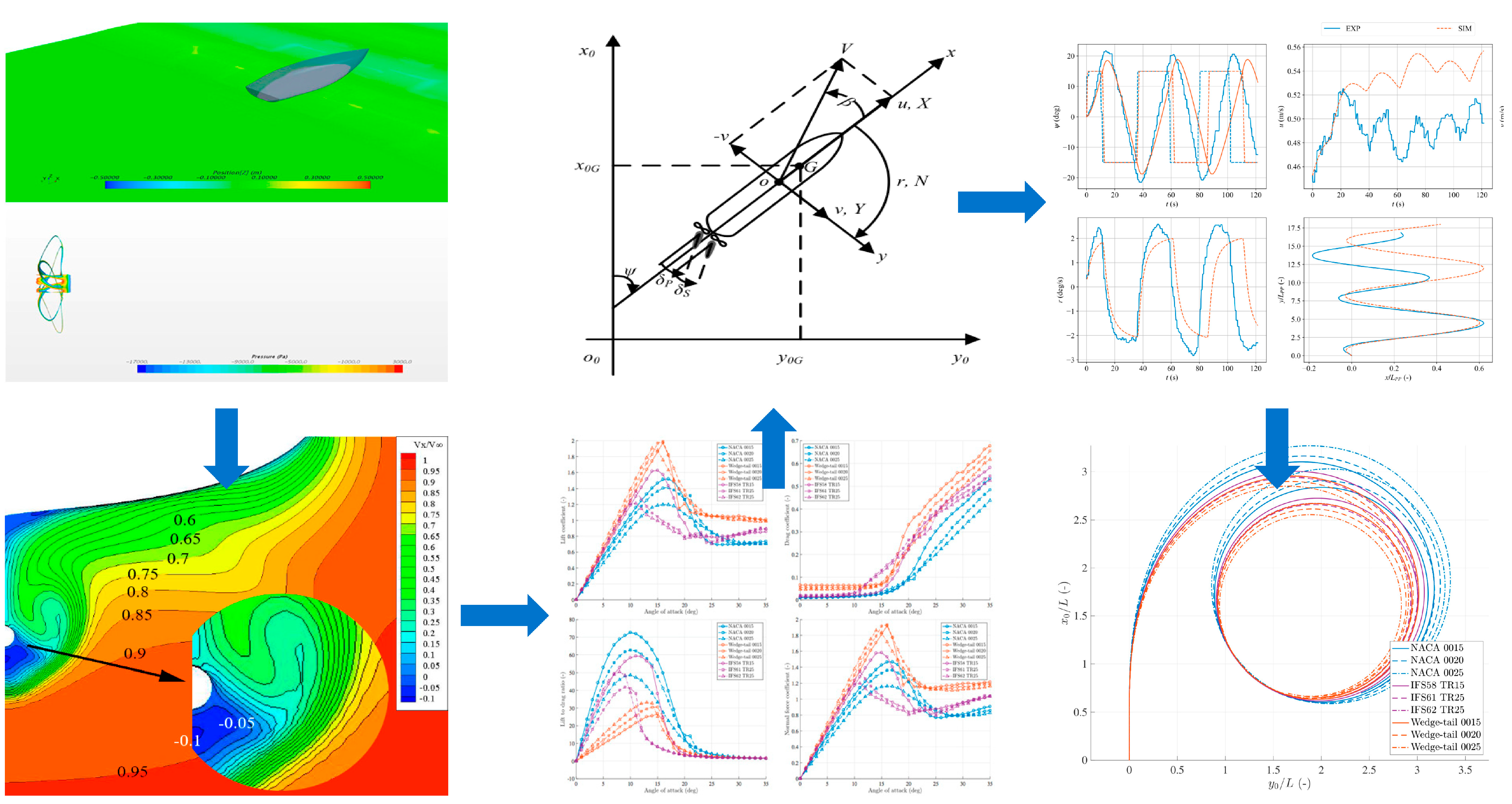
The hydrodynamic characteristics and maneuvering performance of the vessels are important for understanding the reactions or responses of the vessels. Additionally, the maneuvering models are foundational for control algorithms. The CFD technique is a proper way to calculate or simulate flows around the vessels and gradually develop ship motions for the design of simulations and motion controllers [
10]. From CFD calculations, flow features can be extracted and regressed as hydrodynamic coefficients. Accordingly, maneuvering models can be constructed for motion simulations and predictions as shown in
Figure 1. Furthermore, methods such as system identification can be applied to formulate simpler models for controller design, for instance, state space models.
For intelligent navigation, we propose the concept of a navigation brain system. It is the software that we are developing with functions for decision-making using artificial intelligence to process rules, regulations, and experience. By collecting and fusing data from diverse sensors, the NBS offers a systematic, theoretical, and technical foundation for combining AI and manpower [
11]. The NBS system has laid a foundation for AI of the vessels in environment perception and decision-making in route planning and collision avoidance. AI algorithms are trained and tested with the NBS platform to explore the applications of such techniques for model-scale and full-scale ship control.
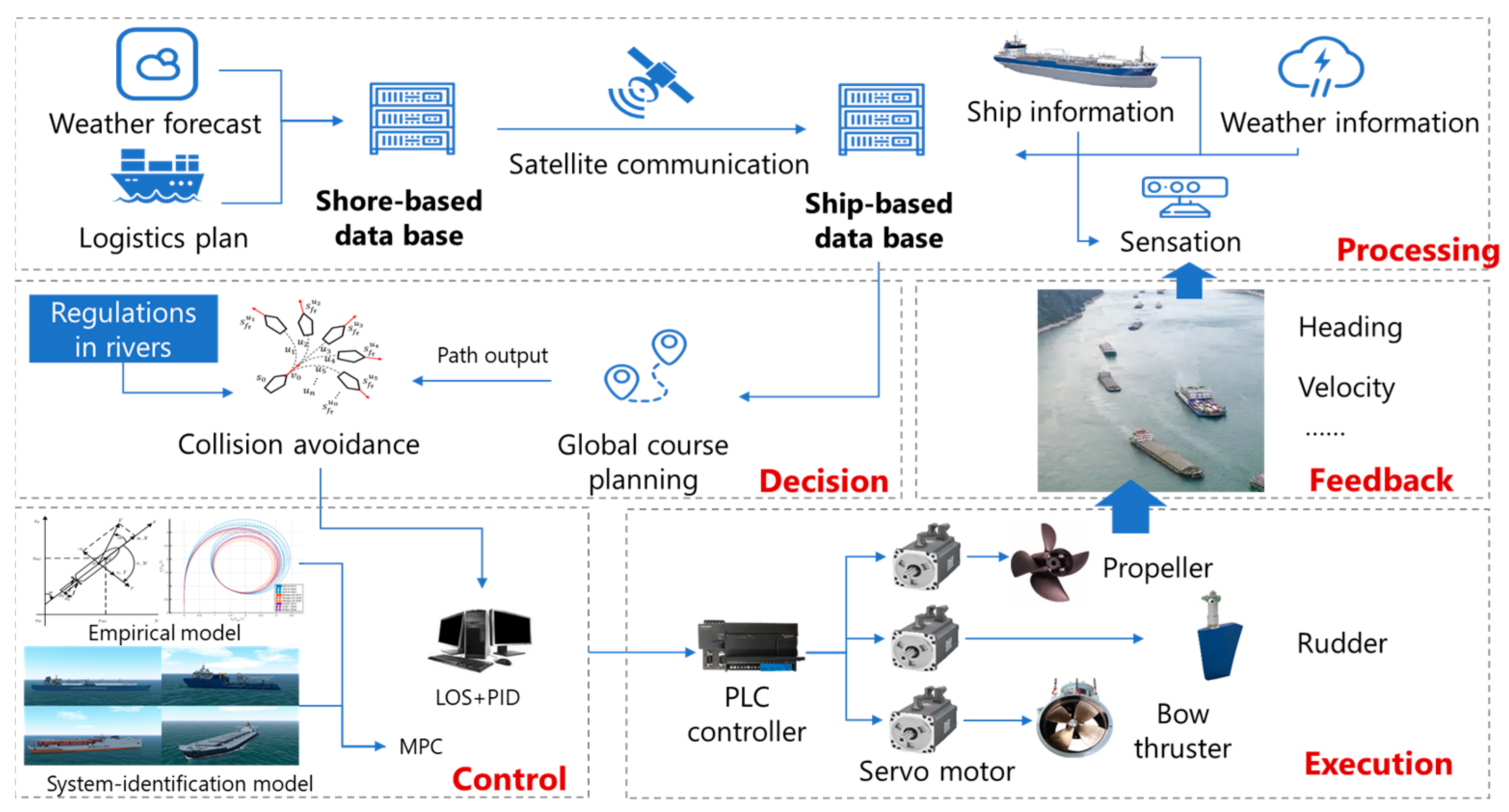
We propose a common architecture of autonomous control through the decision, execution, and feedback loop. The system may have different modules, such as the shore-based database for weather forecasts and logistics plants. We use satellite communication to link the shore-based database and ship-based database. Now, the most important aspect of vessels is collision avoidance.
As shown in
Figure 2, the system takes inputs from ship-based and shore-based databases for real-time information and predicted information. The decision module plays roles in long-distance course planning and short-distance avoidance, which gives outputs of road points and heading angles to the control module. The control model is designed based on the ship motion model. Different control algorithms are applied to different scenarios for different control desires such as efficiency first or accuracy first. The control orders such as rudder angles, propeller revolution rates, or engine telegraphs are given to the excitation module through different protocols. In the end, rudders and propellers are controlled to sail the ship to planned routes, so that the control loop is closed within the system architecture and repeated until the target navigation assignment is completed.
Ship energy efficiency is one of the measures proposed by the IMO to control greenhouse gas emissions (GHG) from ships. The purpose of improving energy efficiency is not just to meet the requirements of emission reduction regulations but also an effective measure for shipping companies to reduce costs and increase efficiency, which is greatly welcomed by shipowners. Ship energy efficiency measures mainly include technical energy efficiency measures for new shipbuilding and operational energy efficiency measures for existing ships [
12,
13]. For a large number of existing ships, the intelligent energy efficiency control technology aims to realize energy conservation and emission reduction during ship operation by optimizing the ships’ speed, route, trim, and power-system energy output with consideration of the complex and changing internal and external factors. Ship operational-energy efficiency is affected by many internal and external factors, mainly the type and dynamic performance of the power system, navigable environment (water velocity, water depth, wind speed, and direction, etc.), and navigation constraints (voyage schedule, cargo load, etc.).
The key processes of intelligent energy-efficiency control include: (1) real-time monitoring of ship energy-efficiency parameters using sensors to carry out the online monitoring of ship-energy consumption equipment and sailing conditions, and collecting, transmitting, and processing the data to lay the foundation for intelligent energy efficiency evaluation and optimization; (2) intelligent energy efficiency evaluation of ship energy efficiency level and status—data mining technologies such as clustering and machine learning are used to analyze the characteristic rules of energy efficiency data, and then the ship energy-efficiency level and status are evaluated by energy efficiency indicators; (3) intelligent decision-making based on energy efficiency optimization—energy efficiency optimization methods usually include speed optimization, route optimization, and trim optimization [
14]; then, the optimization models are built and advanced algorithms are used to carry out energy efficiency optimization, which can provide crew members with better suggestions on energy efficiency management, in order to achieve the goals of energy conservation and emission reduction.
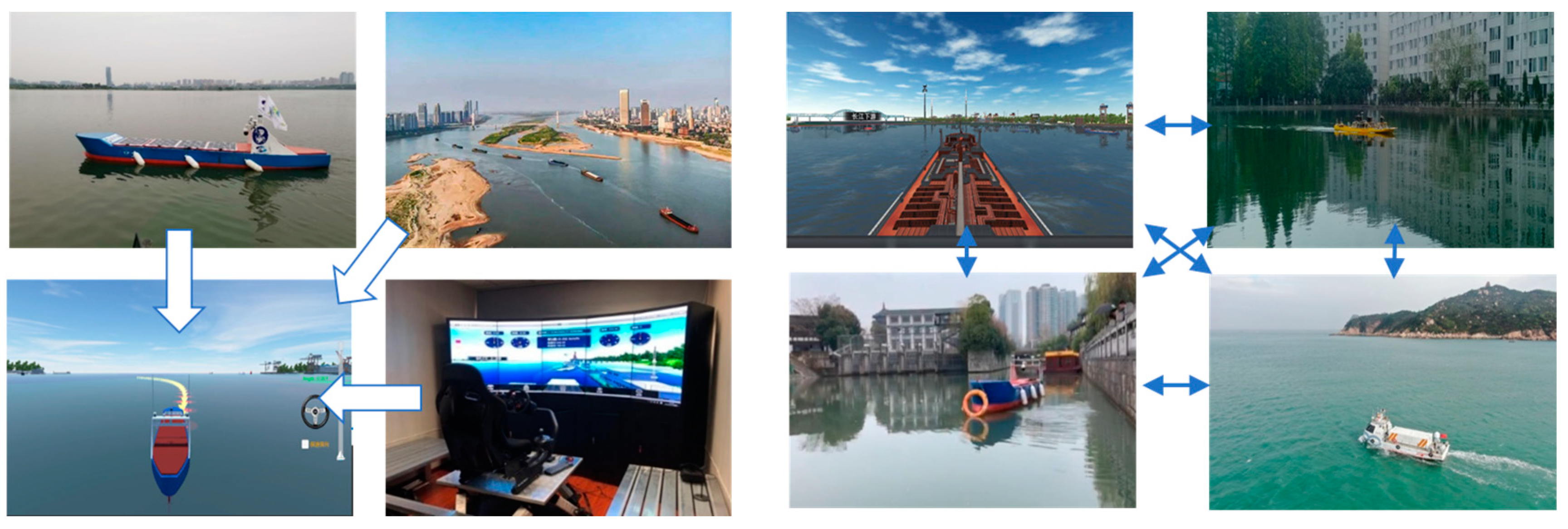
Maritime intelligent supervision maps the real traffic into virtual space. Then, the system carries out the corresponding supervision tasks in the virtual environment, such as the Integrated Supervision Center (ISC). During and after the development of the techniques, their limits must be tested and verified. There are many challenges and problems with testing and verification, such as safety efficiency, cost, coverage, and reality. When testing an intelligent ship, it is important to determine how to secure the safety of the ship itself and the safety of other ships. We developed a testing platform for intelligent ships in Wuhan. The entire test will be completed at different levels such as function level, task level, method level, and performance level. The proposed virtual–real interaction testing is a solution for the above-mentioned challenges and problems. The test is combined with real ships and virtual simulations. The full-scale ship test results will be used to validate the results from towing tank model tests, and the model-scale test will verify assumptions so that we may have a closed testing loop as shown in
Figure 3.
Vessel formation or platoon navigation has been a focus recently on inland waterways because it can improve navigation efficiency and decrease navigation resistance in comparison to single vessel navigation, which must keep a necessary domain from other vessels [
9]. For instance, formation navigation can save the time of going through a vessel lock. A vessel formation can improve the utilization of space in inland channels, especially in narrow waterways.
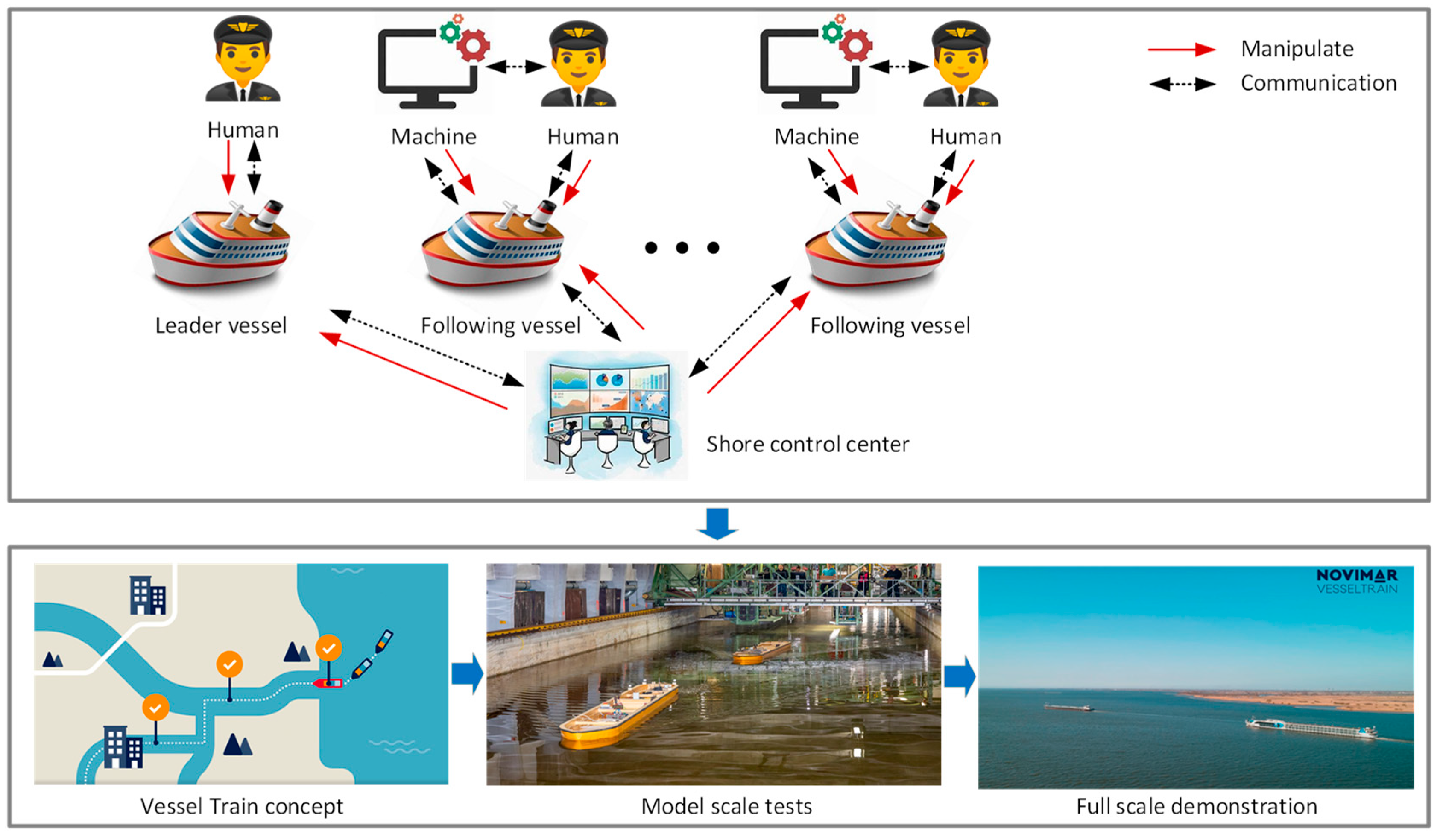
Vessel formation control is a key technology to achieve the generation of ship shape, formation change and recombination, formation-cooperative obstacle avoidance, and tracking. Vessel formation control has been mainly studied in open waters, polar regions, etc. By contrast, vessel formation control in inland waterways has confronted more challenges with complex hydrologic conditions, narrow waterways, and dense vessel traffic. From 2017 to 2021, the NOVIMAR project was launched by the European Union in Horizon 2020 to adjust waterborne transportation for the optimal use of the existing short-sea, sea-river, and inland waterways [
15]. The Vessel Train has been designed and demonstrated from concept, model-scale test, to full-scale demonstration, which is shown in
Figure 4.
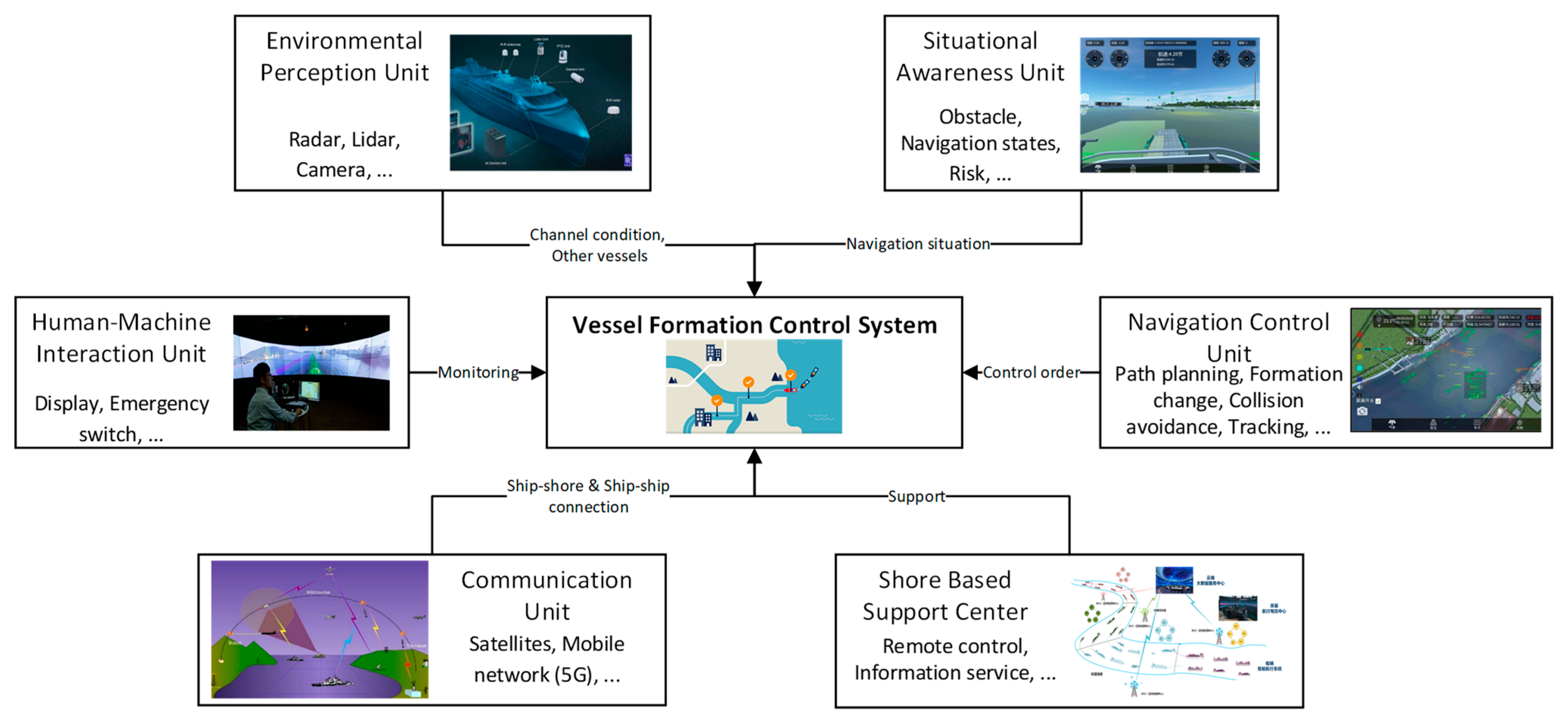
A vessel formation control system usually consists of an environmental perception unit, situational awareness unit, communication unit, navigation control unit, human–machine interaction unit, and shore-based support center. The main structure of the vessel formation control system is shown in
Figure 5. The formation navigation control problems have received more attention than others at the present stage. Compared with other vehicles (cars, aircrafts, etc.), the ship formation control has the characteristics of great inertia, complex environmental disturbances associated with winds, currents, and waves, and differences in vessel maneuverability. To this end, vessel formation control systems needs to solve the following specific problems: (1) to build a vessel formation dynamic model that considers environmental disturbances, vessel maneuverability, formation distance-keeping, etc.; (2) to regenerate real-time navigation scenarios and situations, especially in narrow and busy waters; and (3) to guarantee the safety of vessel formation in case of communication interruption or malfunction of vessel parts.
4. Applications to Intelligent Inland Vessels
Initially, we used the NBS system for ferries. The NBS system was applied to Nanjing and Banqiao ferries. The ferries crossed through the Yangtze River with busy traffic which was quite challenging. The ferries sailed during the night and even on foggy days. We used cameras, radar, and shipside data collectors to gather all the information needed for perception. We helped the ship officers with a three-dimensional environment construction. With our system, we helped them better understand their environment so that the safety and efficiency of the ferries were enhanced.
In 2021, we used a real full-scale cargo ship in Zhejiang province for an autonomous control test. The ship was about 50 m in length. The ship equips with a single propeller and diesel engine. During our test, the ship sailed on its own for about 12 miles as shown in
Figure 8. Additionally, it was remotely controlled for about 1 mile. CCTV cameras were used to lock the ship ahead of the tested ship, and the routes were checked automatically. We used an automated arm to give the rudder angles and engine orders. The system was in a remote-control center, and the captain sailed with the feedback CCTV signals to monitor the traffic.
All in all, with the help of the autonomous system and remote-control system, the ship was able to be sailed in a combined way. Afterward, we used similar techniques for ferries in the Yangtze River. The ferry is the same type as the above-mentioned Nanjing Banqiao ferry as shown in
Figure 8. We sailed the ferry from one side of the river to the other side. The route was about 5 miles and the ferry was controlled by an autonomous system and remote-control system.
5. Applications of Cooperative Ship Formation Control
Vessel formation can make vessel operations safer, more efficient, and beneficial, especially in locks or canals. Cooperative control theory, interactive communication technology, and ship formation maneuvering models are key issues for realizing cooperative navigation. To improve the safety and efficiency when vessels pass through a lock, a cooperative vessel formation system in the lock waterway was proposed [
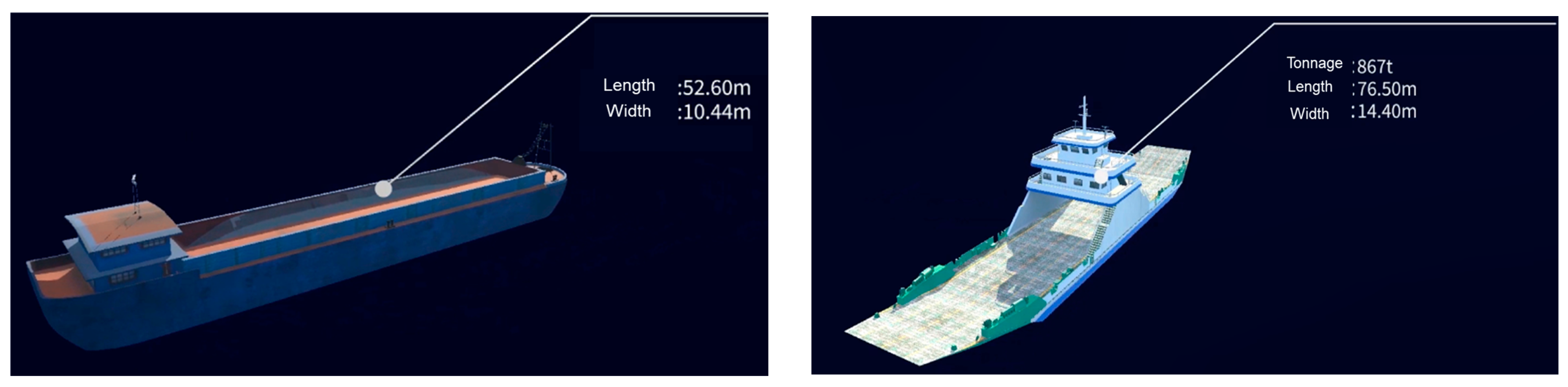
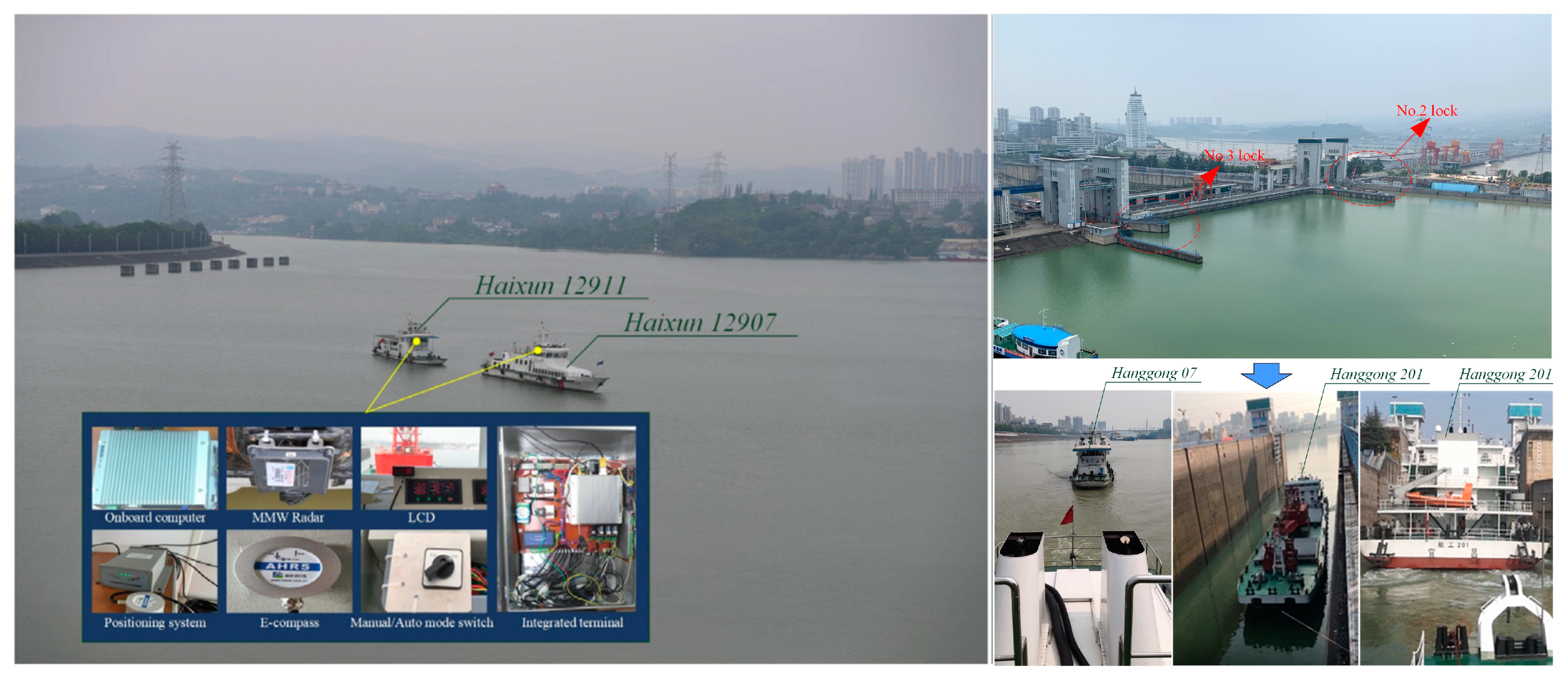
20]. The ship formation control tests were conducted at the Gezhouba vessel locks in China in 2019, as shown in
Figure 9. Two vessels moved synchronously while keeping an appropriate longitudinal distance by controlling the vessels’ engine telegraphs automatically. These tests covered the entire process of passing through a lock, including navigating along the wall, entering the lock chamber, stopping at the lock chamber, leaving the lock chamber, etc. [
21].
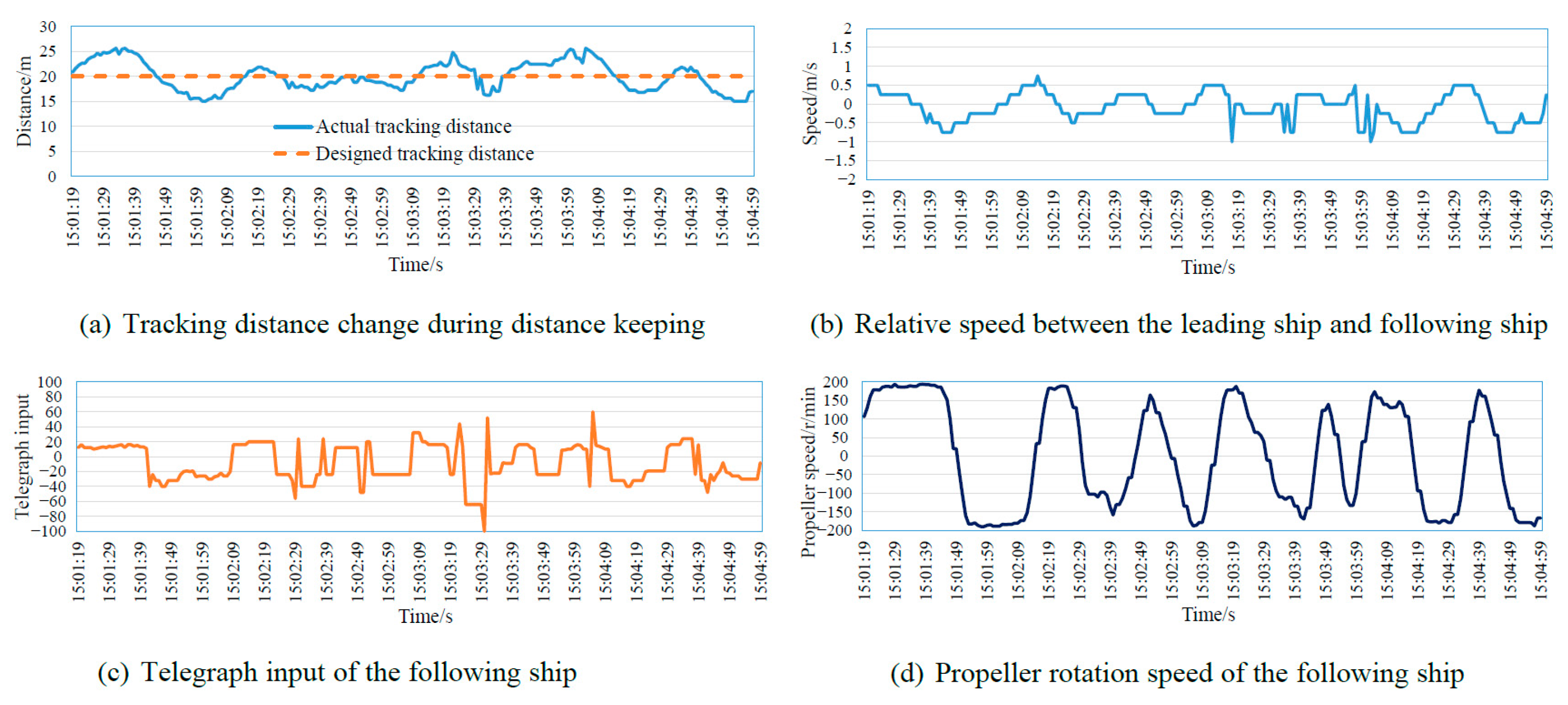
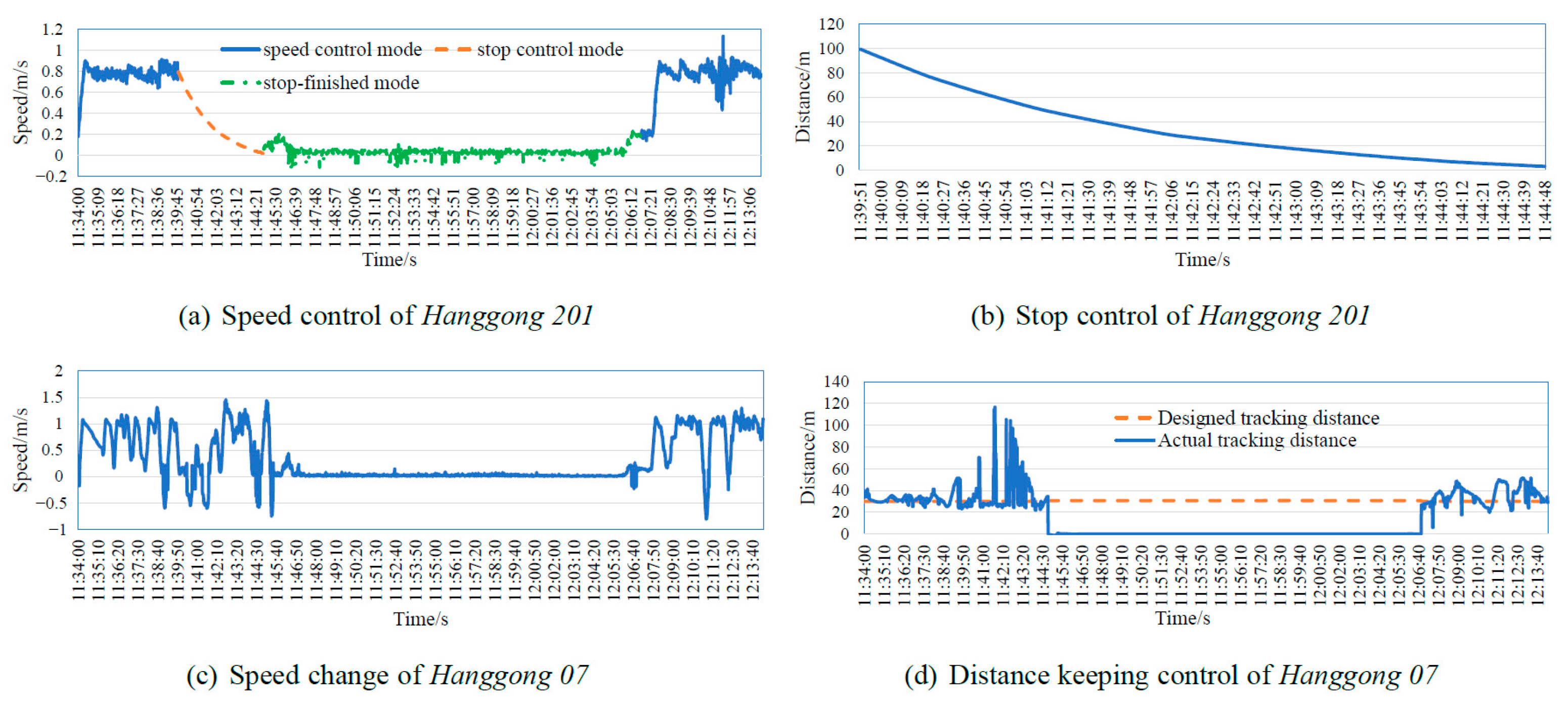
These experiments were conducted from June to November 2019. A ship status-perception method based on a millimeter-wave radar and ship–shore interaction was proposed to acquire the ship’s navigation states and formation states in the confined lock waterway environment. The vessel formation control test results are shown in
Figure 10 and
Figure 11. The average tracking error of the distance-keeping control for the following ship was 2.43 m. The average relative speed for the leading ship was 0.33 m/s. The speed control error for the leading ship was 0.08 m/s. More details of this test can be found in [
22].
To test the vessel formation control method in lock waters more conveniently and effectively, a 3D simulation system was developed, which can be seen in
Figure 12. This simulation system was created using MATLAB and Unity 3D software platforms. Specifically, the ship control algorithms were run using the MATLAB platform. The data exchange between MATLAB and Unity 3D was carried out using the TCP/IP protocol.
6. Conclusions and Future Works
The future of intelligent ships lies in the ability of the crew to be onshore and/or onboard. The relationships between the crew on ships and shore will be extensively changed. In the initial stage, the shoreside crew will give some reminders or alerts to the shipside crew. The ship will still be under the control of the shipside crew members, and gradually, the shoreside crew members will give some suggestions. They will give some tips to the shipside crew members who will work with the AI to steer the ship. In the end, in the control order, the priority of the shoreside crew members will become higher, and they will take control of the ship. The shipside crew members will only perform in emergencies or some unexpected function failures.
Throughout our research, we have completed the route from prototype to real application. Initially, we completed some tests in the Qinhuai river in Nanjing with model-scale ships. Then, we built up this mobile remote-control center, after which we completed some demonstrations with full-scale ships with clean energy. This development route (i.e., theories and methods, virtual simulations, model-scale tests, and full-scale demonstrations) can be taken as a reference application path. We believe that all of these functions will improve the safety and efficiency of ships and shipping. Below are some of the tasks for the future New Generation of Waterborne Transportation systems.
- (1)
The design of green intelligent ships—ship design is the basic stage of developing green intelligent ships, which guarantees the goal of being green and intelligent.
- (2)
Autonomous navigation of green intelligent ships—intelligent navigation has four stages including enhancing navigation, assistant navigation, remote navigation, and autonomous navigation.
- (3)
Green energy-efficient control of intelligent ship equipment—considering the environmental concerns in the inland/offshore regions and the safety concerns in complex waters, it is necessary to study the green equipment and control techniques onboard.
- (4)
Safety of green intelligent ships—navigation safety is one of the challenges in the application of intelligent ships.
- (5)
Validation and standards of green intelligent ships—the validation and standards of green intelligent ships are key in designing, building, operating, and maintaining green intelligent ships in the future.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











